4.1. Классификация видов модуляции
4.2. Сигналы с непрерывной амплитудной модуляцией
4.3. Сигналы балансной и однополосной амплитудной модуляции
4.4. Сигналы с непрерывной угловой модуляцией
4.4.1. Обобщенное представление сигналов с угловой модуляцией
4.5. Сигналы с дискретной модуляцией
4.5.1. Сигналы с дискретной амплитудной модуляцией
4.1. Классификация видов модуляции
Рассмотренные выше методы анализа первичных сигналов позволяют определить их спектральные и энергетические характеристики. Первичные сигналы являются основными носителями информации. Вместе с тем их спектральные характеристики не соответствуют частотным характеристикам каналов передачи радиотехнических информационных систем. Как правило, энергия первичных сигналов сосредоточена в области низких частот. Так, например, при передаче речи или музыки энергия первичного сигнала сосредоточена примерно в диапазоне частот от 20 Гц до 15 кГц. В то же время диапазон дециметровых волн, который широко используются для передачи информационных и музыкальных программ, занимает частоты от 300 до 3000 мегагерц. Возникает задача переноса спектров первичных сигналов в соответствующие диапазоны радиочастот для передачи их по радиоканалам. Эта задача решается по средствам операции модуляции.
Модуляцией называется процедура преобразования низкочастотных первичных сигналов в сигналы радиочастотного диапазона.
В процедуре модуляции участвуют первичный сигнал ![]() и некоторое вспомогательное колебание
и некоторое вспомогательное колебание ![]() , называемое несущим колебанием или просто несущей. В общем виде процедуру модуляции можно представить следующим образом
, называемое несущим колебанием или просто несущей. В общем виде процедуру модуляции можно представить следующим образом
![]() , (4.1)
, (4.1)
где ![]() – правило преобразования (оператор) первичного сигнала
– правило преобразования (оператор) первичного сигнала ![]() в модулированного колебание
в модулированного колебание ![]() .
.
Это правило указывает, какой параметр (или несколько параметров) несущего колебания изменяются по закону изменения ![]() . Поскольку
. Поскольку ![]() управляет изменением параметров
управляет изменением параметров ![]() , то, как было отмечено в первом разделе, сигнал
, то, как было отмечено в первом разделе, сигнал ![]() , является управляющим (модулирующим), а
, является управляющим (модулирующим), а ![]() – модулированным сигналами. Очевидно,
– модулированным сигналами. Очевидно, ![]() соответствует оператору
соответствует оператору ![]() обобщенной структурной схемы РТИС.
обобщенной структурной схемы РТИС.
Выражение (4.1) позволяет провести классификацию видов модуляции, которая представлена на рис. 4.1.
Рис. 4.1
В качестве классификационных признаков выберем вид (форму) управляющего сигнала ![]() , форму несущего колебания
, форму несущего колебания ![]() и вид управляемого параметра несущего колебания.
и вид управляемого параметра несущего колебания.
В первом разделе была проведена классификация первичных сигналов. В радиотехнических информационных системах наиболее широкое распространение в качестве первичных (управляющих) сигналов получили непрерывные и цифровые сигналы. В соответствии с этим по виду управляющего сигнала можно выделить непрерывную и дискретную модуляцию.
В качестве несущего колебания в практической радиотехнике используются гармонические колебания и импульсные последовательности. В соответствии с формой несущего колебания различают модуляцию гармонической несущей и импульсную модуляцию.
И наконец, по виду управляемого параметра несущего колебания в случае гармонической несущей различают амплитудную, частотную и фазовую модуляцию. Очевидно, в этом случае в качестве управляемого параметра выступают соответственно амплитуда, частота или начальная фаза гармонического колебания. Если в качестве несущего колебания используется импульсная последовательность, то аналогом частотной модуляции является широтная импульсная модуляция, где управляемым параметром выступает длительность импульса, а аналогом фазовой модуляции – временная импульсная модуляция, где управляемым параметром выступает положение импульса на временной оси.
В современных радиотехнических системах наиболее широко в качестве несущего колебания используется гармоническое колебание. Учитывая это обстоятельство в дальнейшем, основное внимание будет уделено сигналам с непрерывной и дискретной модуляцией гармонической несущей.
4.2. Сигналы с непрерывной амплитудной модуляцией
Рассмотрение модулированных сигналов начнем с сигналов, у которых в качестве изменяемого параметра выступает амплитуда несущего колебания. Модулированный сигнал в этом случае является амплитудно-модулированным или сигналом с амплитудной модуляцией (АМ-сигналом).
Как уже было отмечено выше, основное внимание будет уделено сигналам, несущее колебание которых представляет собой гармоническое колебание вида
![]() ,
,
где ![]() – амплитуда несущего колебания,
– амплитуда несущего колебания,
![]() – частота несущего колебания.
– частота несущего колебания.
Здесь и далее полагается, что начальные фазы гармонических колебаний равны нулю.
В качестве модулирующих сигналов сначала рассмотрим непрерывные сигналы ![]() . Тогда модулированные сигналы будут являться сигналами с непрерывной амплитудной модуляцией. Такой сигнал описывается выражением
. Тогда модулированные сигналы будут являться сигналами с непрерывной амплитудной модуляцией. Такой сигнал описывается выражением
![]() , (4.2)
, (4.2)
где ![]() – огибающая АМ-сигнала,
– огибающая АМ-сигнала,
![]() – коэффициент амплитудной модуляции.
– коэффициент амплитудной модуляции.
Из выражения (4.2) следует, что АМ-сигнал представляет собой произведение огибающей ![]() на гармоническую функцию
на гармоническую функцию ![]() . Коэффициент амплитудной модуляции
. Коэффициент амплитудной модуляции ![]() характеризует глубину модуляции и в общем случае описывается выражением
характеризует глубину модуляции и в общем случае описывается выражением
![]() . (4.3)
. (4.3)
Очевидно, при ![]() сигнал представляет собой просто несущее колебание.
сигнал представляет собой просто несущее колебание.
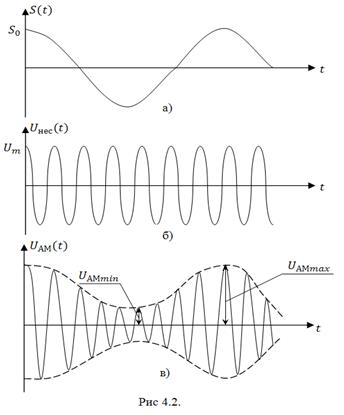
Для более детального анализа характеристик АМ-сигналов рассмотрим простейший АМ-сигнал, в котором в качестве модулирующего сигнала ![]() выступает гармоническое колебание
выступает гармоническое колебание
![]() , (4.4)
, (4.4)
где ![]() ,
, ![]() – соответственно амплитуда и частота модулирующего (управляющего) сигнала, причем
– соответственно амплитуда и частота модулирующего (управляющего) сигнала, причем ![]() . В этом случае сигнал описывается выражением
. В этом случае сигнал описывается выражением
![]() , (4.5)
, (4.5)
и называется сигналом однотональной амплитудной модуляции.
На рис. 4.2 изображены модулирующий сигнал ![]() , колебание несущей частоты
, колебание несущей частоты ![]() и сигнал
и сигнал ![]() .
.
Для такого сигнала коэффициент глубины амплитудной модуляции равен
![]() .
.
Воспользовавшись известным тригонометрическим соотношением
![]()
после несложных преобразований получим
![]()
![]() (4.6)
(4.6)
Выражение (4.6) устанавливает спектральный состав однотонального АМ-сигнала. Первое слагаемое представляет собой немодулированное колебание (несущее колебание). Второе и третье слагаемые соответствуют новым гармоническим составляющим, появившимся в результате модуляции амплитуды несущего колебания; частоты этих колебаний ![]() и
и ![]() называются нижней и верхней боковыми частотами, а сами составляющие – нижней и верхней боковыми составляющими.
называются нижней и верхней боковыми частотами, а сами составляющие – нижней и верхней боковыми составляющими.
Амплитуды этих двух колебаний одинаковы и составляют величину
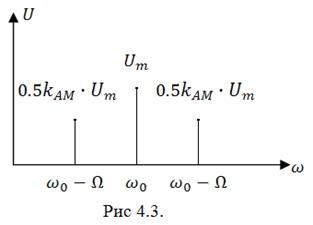
![]() , ( 4.7)
, ( 4.7)
На рис. 4.3 изображен амплитудный спектр однотонального АМ-сигнала. Из этого рисунка следует, что амплитуды боковых составляющих располагаются симметрично относительно амплитуды и начальной фазы несущего колебания. Очевидно, ширина спектра однотонального АМ-сигнала равна удвоенной частоте управляющего сигнала
![]() .
.
В общем случае, когда управляющий сигнал характеризуется произвольным спектром, сосредоточенным в полосе частот от ![]() до
до ![]() , спектральный характер АМ-сигнала принципиально не отличается от однотонального.
, спектральный характер АМ-сигнала принципиально не отличается от однотонального.
На рис. 4.4 изображены спектры управляющего сигнала и сигнала с амплитудной модуляцией. В отличие от однотонального АМ-сигнала в спектре произвольного АМ-сигнала фигурируют нижняя и верхняя боковые полосы. При этом верхняя боковая полоса является копией спектра управляющего сигнала, сдвинутой по оси частот на
величину ![]() , а нижняя боковая полоса представляет собой зекальное отображение верхней. Очевидно, ширина спектра произвольного АМ-сигнала
, а нижняя боковая полоса представляет собой зекальное отображение верхней. Очевидно, ширина спектра произвольного АМ-сигнала
![]() , (4.8)
, (4.8)
т.е. равна удвоенной верхней граничной частоте управляющего сигнала.
Возвратимся к сигналу однотональной амплитудной модуляции и найдем его энергетические характеристики. Средняя мощность АМ-сигнала за период ![]() управляющего сигнала определяется по формуле:
управляющего сигнала определяется по формуле:
![]() . (4.9)
. (4.9)
Так как ![]() , а
, а ![]() , положим
, положим ![]() , где
, где ![]() . Подставляя выражение (4.6) в (4.9), после несложных, но достаточно громоздких преобразований с учетом того, что
. Подставляя выражение (4.6) в (4.9), после несложных, но достаточно громоздких преобразований с учетом того, что ![]() и с использованием тригонометрических соотношений
и с использованием тригонометрических соотношений
![]() и
и ![]() ,
,
получим
![]() . (4.10)
. (4.10)
Здесь первое слагаемое характеризует среднюю мощность несущего колебания, а второе – суммарную среднюю мощность боковых составляющих, т.е.
![]() .
.
Так как суммарная средняя мощность боковых составляющих делится поровну между нижней и верхней, что вытекает из (4.7), то отсюда следует
![]() . (4.11)
. (4.11)
Таким образом, на передачу несущего колебания в АМ-сигнале тратится более половины мощности (с учетом того, что ![]() ), чем на передачу боковых составляющих. Так как информация заложена именно в боковых составляющих, передача составляющей несущего колебания нецелесообразна с энергетической точки зрения. Поиск более эффективных методов использования принципа амплитудной модуляции приводит к сигналам балансной и однополосной амплитудной модуляции.
), чем на передачу боковых составляющих. Так как информация заложена именно в боковых составляющих, передача составляющей несущего колебания нецелесообразна с энергетической точки зрения. Поиск более эффективных методов использования принципа амплитудной модуляции приводит к сигналам балансной и однополосной амплитудной модуляции.
4.3. Сигналы балансной и однополосной амплитудной модуляции
Сигналы балансной амплитудной модуляции (БАМ) характеризуются отсутствием в спектре составляющей несущего колебания. Перейдем сразу к рассмотрению сигналов однотональной балансной модуляции, когда в качестве управляющего колебания выступает гармонический сигнал вида (4.4). Исключение из (4.6) составляющей несущего колебания
![]() ,
,
приводит к результату
![]() . (4.12)
. (4.12)
Рассчитаем среднюю мощность сигнала балансной модуляции. Подстановка (4.12) в (4.9) после преобразований дает выражение
![]() .
.
Очевидно, что энергетический выигрыш при использовании сигналов балансной модуляции по сравнению с классической амплитудной модуляцией будет равен
 .
.
При ![]() этот выигрыш составляет величину
этот выигрыш составляет величину ![]() .
.
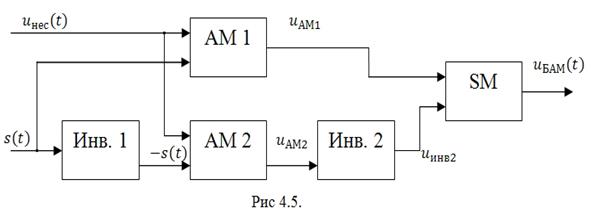
На рис. 4.5 представлен один из вариантов структурной схемы формирователя сигналов балансной амплитудной модуляции. Формирователь содержит:
- Инв1, Инв2 – инверторы сигналов (устройства, изменяющие полярность напряжений на противоположную);
- АМ1, АМ2 – амплитудные модуляторы;
- SM – сумматор.
Колебание несущей частоты ![]() поступает на входы модуляторов АМ1 и АМ2 непосредственно. Что касается управляющего сигнала
поступает на входы модуляторов АМ1 и АМ2 непосредственно. Что касается управляющего сигнала ![]() , то на второй вход АМ1 он поступает непосредственно, а на второй вход АМ2 – через инвертор Инв1. В результате на выходах модуляторов формируются колебания вида
, то на второй вход АМ1 он поступает непосредственно, а на второй вход АМ2 – через инвертор Инв1. В результате на выходах модуляторов формируются колебания вида
![]() ,
,
![]() .
.
На входы сумматора поступают соответственно колебания ![]() и
и ![]() . Результирующий сигнал на выходе сумматора составит
. Результирующий сигнал на выходе сумматора составит
![]() . (4.13)
. (4.13)
В случае однотональной амплитудной модуляции выражение (4.13) принимает вид
![]() . (4.14)
. (4.14)
Используя формулу произведения косинусов, после преобразований получим
![]() , (4.15)
, (4.15)
что с точностью до постоянного множителя совпадает с (4.12). Очевидно, ширина спектра сигналов БАМ равна ширине спектра сигналов АМ.
Балансная амплитудная модуляция позволяет исключить передачу несущего колебания, что приводит к энергетическому выигрышу. Вместе с тем, обе боковые полосы (боковые составляющие в случае однотональной АМ) несут одну и ту же информацию. Напрашивается вывод о целесообразности формирования и передачи сигналов с подавленной одной из боковых полос. В этом случае мы приходим к однополосной амплитудной модуляции (ОАМ).
Если из спектра сигнала БАМ исключить одну из боковых составляющих (скажем верхнюю боковую составляющую), то в случае гармонического управляющего сигнала получим
![]() . (4.16)
. (4.16)
Так как средняя мощность сигнала БАМ делится поровну между боковыми составляющими, то очевидно, что средняя мощность сигнала ОАМ составит
![]() .
.
Энергетический выигрыш по сравнению с амплитудной модуляцией составит
 ,
,
а при ![]() он будет равен
он будет равен ![]() .
.
Формирование однополосного АМ-сигнала может быть осуществлено на базе формирователей сигналов балансной модуляции. Структурная схема формирователя однополосного АМ-сигнала представлена на рис. 4.6.
В состав формирователя сигнала однополосной амплитудной модуляции входят:
- ФВ1, ФВ2 – фазовращатели на угол
 ;
; - БАМ1, БАМ2 – формирователи сигналов балансной модуляции;
- SM – сумматор.
На входы БАМ1 поступают сигналы:
![]()
и ![]() .
.
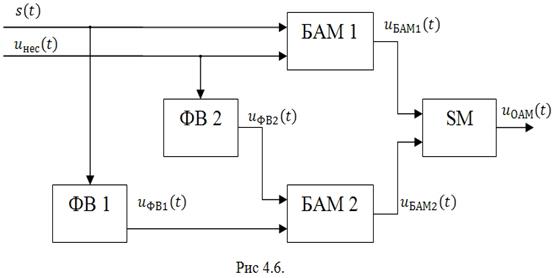
Тогда на его выходе в соответствии с (4.15) формируется сигнал
![]() . (4.17)
. (4.17)
На входы БАМ2 поступают сигналы
![]()
и ![]() .
.
С выхода БАМ2 снимается колебание, описываемое в соответствии с (4.14) с заменой косинусов на синусы
![]() .
.
С учетом известного тригонометрического соотношения
![]() ,
,
выходной сигнал БАМ2 преобразуется к виду
![]() . (4.18)
. (4.18)
Сложение сигналов (4.17) и (4.18) в сумматоре SM дает
![]() , (4.19)
, (4.19)
что с точностью до постоянного множителя совпадает с (4.16). Что касается спектральных характеристик, то ширина спектра сигналов ОАМ вдвое меньше спектра АМ или БАМ сигналов.
Таким образом, при одинаковых ![]() и
и ![]() однополосная АМ обеспечивает существенный энергетический выигрыш по сравнению с классической АМ и балансной модуляцией. Вместе с тем, реализация сигналов балансной амплитудной и однополосной амплитудной модуляции сопряжена с некоторыми трудностями, касающимися необходимости восстановления несущего колебания при обработке сигналов на приемной стороне. Эта задача решается устройствами синхронизации передающей и приемной сторон, что в общем плане приводит к усложнению аппаратуры.
однополосная АМ обеспечивает существенный энергетический выигрыш по сравнению с классической АМ и балансной модуляцией. Вместе с тем, реализация сигналов балансной амплитудной и однополосной амплитудной модуляции сопряжена с некоторыми трудностями, касающимися необходимости восстановления несущего колебания при обработке сигналов на приемной стороне. Эта задача решается устройствами синхронизации передающей и приемной сторон, что в общем плане приводит к усложнению аппаратуры.
4.4. Сигналы с непрерывной угловой модуляцией
4.4.1. Обобщенное представление сигналов с угловой модуляцией
В предыдущем разделе была рассмотрена процедура модуляции, когда информационным параметром, изменяемым в соответствии с законом управляющего (модулирующего) сигнала являлась амплитуда несущего колебания. Однако помимо амплитуды несущее колебание характеризуется также частотой ![]() и начальной фазой
и начальной фазой ![]()
![]() , (4.20)
, (4.20)
где ![]() – полная фаза несущего колебания, которая определяет текущее значение фазового угла.
– полная фаза несущего колебания, которая определяет текущее значение фазового угла.
Изменение либо ![]() , либо
, либо ![]() в соответствии с управляющим сигналом
в соответствии с управляющим сигналом ![]() соответствует угловой модуляции. Таким образом, понятие угловой модуляции включает в себя как частотную (ЧМ), так и фазовую (ФМ) модуляцию.
соответствует угловой модуляции. Таким образом, понятие угловой модуляции включает в себя как частотную (ЧМ), так и фазовую (ФМ) модуляцию.
Рассмотрим обобщенные аналитические соотношения для сигналов с угловой модуляцией. При частотной модуляции в соответствии с управляющим сигналом изменяется мгновенная частота несущего колебания в пределах от нижней ![]() до
до ![]() граничных частот
граничных частот
![]() . (4.21)
. (4.21)
Наибольшее значение частотного отклонения ![]() от
от ![]() называется девиацией частоты
называется девиацией частоты ![]()
![]() .
.
Если граничные частоты расположены симметрично относительно ![]() , то девиация частоты
, то девиация частоты
![]() . (4.22)
. (4.22)
Именно такой случай частотной модуляции будет рассматриваться в дальнейшем.
Закон изменения полной фазы определяется как интеграл от мгновенной частоты. Тогда, с учетом (4.21) и (4.22), можно записать
![]() . (4.23)
. (4.23)
Подставляя (4.23) в (4.20), получим обобщенное аналитическое выражение сигнала с частотной модуляцией
![]() . (4.24)
. (4.24)
Слагаемое ![]() представляет собой составляющую полной фазы, обусловленную наличием частотной модуляции. Нетрудно убедится в том, что полная фаза сигнала с частотной модуляцией изменяется по закону интеграла от
представляет собой составляющую полной фазы, обусловленную наличием частотной модуляции. Нетрудно убедится в том, что полная фаза сигнала с частотной модуляцией изменяется по закону интеграла от ![]() .
.
При фазовой модуляции, в соответствии с модулирующем сигналом ![]() , изменяется начальная фаза несущего колебания в пределах от нижнего
, изменяется начальная фаза несущего колебания в пределах от нижнего ![]() до верхнего
до верхнего ![]() граничных значений фазы
граничных значений фазы
![]() . (4.25)
. (4.25)
Наибольшее отклонение фазового сдвига ![]() от
от ![]() называется девиацией фазы
называется девиацией фазы ![]() . Если
. Если ![]() и
и ![]() расположены симметрично относительно
расположены симметрично относительно ![]() , то
, то ![]() . В этом случае полная фаза сигнала с фазовой модуляцией
. В этом случае полная фаза сигнала с фазовой модуляцией
![]() . (4.26)
. (4.26)
Тогда, подставляя (4.26) в (4.20), получим обобщенное аналитическое выражение сигнала с фазовой модуляцией
![]() . (4.27)
. (4.27)
Рассмотрим, как изменяется мгновенная частота сигнала при фазовой модуляции. Известно, что мгновенная частота и текущая пол-
ная фаза связаны соотношением
![]() .
.
Подставляя в это выражение формулу (4.26) и проведя операцию дифференцирования, получим
![]() , (4.28)
, (4.28)
где ![]() – составляющая частоты, обусловленная наличием фазовой модуляции несущего колебания (4.20).
– составляющая частоты, обусловленная наличием фазовой модуляции несущего колебания (4.20).
Таким образом, изменение начальной фазы несущего колебания приводит к изменению мгновенных значений частоты по закону производной от ![]() по времени.
по времени.
Практическая реализация устройств формирования сигналов угловой модуляции может осуществляться одним из двух методов: прямым или косвенным. При прямом методе в соответствии с законом изменения управляющего сигнала ![]() изменяются параметры колебательного контура генератора несущего колебания. Выходной сигнал при этом оказывается промодулированным по частоте. Для получения сигнала фазовой модуляции на входе частотного модулятора включается дифференцирующая цепь.
изменяются параметры колебательного контура генератора несущего колебания. Выходной сигнал при этом оказывается промодулированным по частоте. Для получения сигнала фазовой модуляции на входе частотного модулятора включается дифференцирующая цепь.
Сигналы фазовой модуляции при прямом методе формируются путём изменения параметров колебательного контура усилителя, подключённого к выходу генератора несущего колебания. Для преобразования сигналов фазовой модуляции в сигнал частотной модуляции управляющее колебание подаётся на вход фазового модулятора через интегрирующую цепь.
Косвенные методы не предполагают непосредственного воздействия управляющего сигнала на параметры колебательного контура. Один из косвенных методов базируется на преобразовании амплитудно-модулированных сигналов в сигналы фазовой модуляции, а те, в свою очередь, - в сигналы частотной модуляции. Более подробно, вопросы формирования сигналов частотной и фазовой модуляции будут рассмотрены ниже.
4.4.2. Сигналы с частотной модуляцией
Анализ характеристик сигналов с угловой модуляцией мы начнём с рассмотрения однотональной частотной модуляции. Управляющий сигнал в этом случае представляет собой колебание единичной амплитуды (к этому виду всегда можно привести ![]() )
)
![]() , (4.29)
, (4.29)
а модулируемым параметром несущего колебания является мгновенная частота. Тогда, подставляя (4.29) в (4.24), получим:
![]() .
.
Выполнив операцию интегрирования, приходим к следующему выражению сигнала однотональной частотной модуляции
![]() . (4.30)
. (4.30)
Отношение
![]()
называется индексом частотной модуляции и имеет физический смысл части девиации частоты ![]() , приходящуюся на единицу частоты модулирующего сигнала. Так например, если девиация частоты несущего колебания
, приходящуюся на единицу частоты модулирующего сигнала. Так например, если девиация частоты несущего колебания ![]() МГц составляет
МГц составляет ![]() , а частота управляющего сигнала
, а частота управляющего сигнала ![]() кГц, то индекс частотной модуляции составит
кГц, то индекс частотной модуляции составит ![]() . В выражении (4.30) начальная фаза
. В выражении (4.30) начальная фаза ![]() не учитывается как не имеющая принципиального значения.
не учитывается как не имеющая принципиального значения.
Временная диаграмма сигнала при однотональной ЧМ представлена на рис. 4.7
Рассмотрение спектральных характеристик ЧМ-сигнала начнём с частного случая малого индекса частотной модуляции ![]() . Воспользовавшись соотношением
. Воспользовавшись соотношением
![]() ,
,
представим (4.30) в виде
![]()
![]() (4.31)
(4.31)
Поскольку ![]() , то можно воспользоваться приближёнными представлениями
, то можно воспользоваться приближёнными представлениями
![]() ;
; ![]() при
при ![]() .
.
Тогда
![]() ,
, ![]()
и выражение (4.31) приобретает вид
![]() .
.
Воспользовавшись известным тригонометрическим соотношением
![]()
и полагая ![]() и
и ![]() , получим:
, получим:
![]() (4.32)
(4.32)
или
![]() . (4.33)
. (4.33)
Это выражение напоминает выражение (4.6) для однотонального АМ – сигнала. Отличие состоит в том, что, если в однотональном АМ – сигнале начальные фазы боковых составляющих одинаковы, то в однотональном ЧМ сигнале при малых индексах частотной модуляции они отличаются на угол ![]() , т.е. находятся в противофазе.
, т.е. находятся в противофазе.
Спектральная диаграмма такого сигнала показана на рис. 4.8
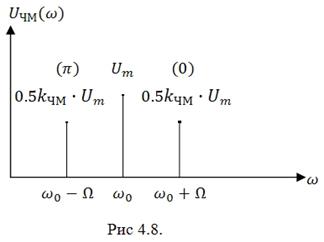 В скобках указаны значения начальной фазы боковых составляющих. Очевидно, ширина спектра ЧМ – сигнала при малых индексах частотной модуляции равна
В скобках указаны значения начальной фазы боковых составляющих. Очевидно, ширина спектра ЧМ – сигнала при малых индексах частотной модуляции равна
![]() .
.
Сигналы с частотной модуляцией с малым ![]() в практической радиотехнике применяются достаточно редко.
в практической радиотехнике применяются достаточно редко.
В реальных радиотехнических системах индекс частотной модуляции существенно превышает единицу.
Так например, в современных аналоговых системах мобильной связи, использующих для передачи речевых сообщений сигналы частотной модуляции при верхней частоте речевого сигнала ![]() кГц и девиации частоты
кГц и девиации частоты ![]() кГц, индекс
кГц, индекс ![]() , как нетрудно убедиться, достигает значения ~3-4. В системах же радиовещания метрового диапазона индекс частотной модуляции может превышать значения, равного 10. Поэтому рассмотрим спектральные характеристики ЧМ сигналов при произвольных значениях величины
, как нетрудно убедиться, достигает значения ~3-4. В системах же радиовещания метрового диапазона индекс частотной модуляции может превышать значения, равного 10. Поэтому рассмотрим спектральные характеристики ЧМ сигналов при произвольных значениях величины ![]() .
.
Возвратимся к выражению (4.32). Известны следующие виды разложения
![]() (4.34)
(4.34)
![]() , (4.35)
, (4.35)
где ![]() – фунция Бесселя первого рода
– фунция Бесселя первого рода ![]() -го порядка.
-го порядка.
Подставляя эти выражения в (4.32), после несложных, но довольно громоздких преобразований с использованием уже неоднократно упомянутых выше соотношений произведений косинусов и синусов, получим
|
|
|
|
|
где ![]() .
.
Полученное выражение представляет собой разложение однотонального ЧМ – сигнала на гармонические составляющие, т.е. амплитудный спектр. Первое слагаемое этого выражения является спектральной составляющей колебания несущей частоты с амплитудой ![]() . Первая сумма выражения (4.35) характеризует боковые составляющие с амплитудами
. Первая сумма выражения (4.35) характеризует боковые составляющие с амплитудами ![]() и частотами
и частотами ![]() , т.е. нижнюю боковую полосу, а вторая сумма – боковые составляющие с амплитудами
, т.е. нижнюю боковую полосу, а вторая сумма – боковые составляющие с амплитудами ![]() и частотами
и частотами ![]() , т.е. верхнюю боковую полосу спектра.
, т.е. верхнюю боковую полосу спектра.
Спектральная диаграмма ЧМ – сигнала при произвольном ![]() представлена на рис. 4.9.
представлена на рис. 4.9.
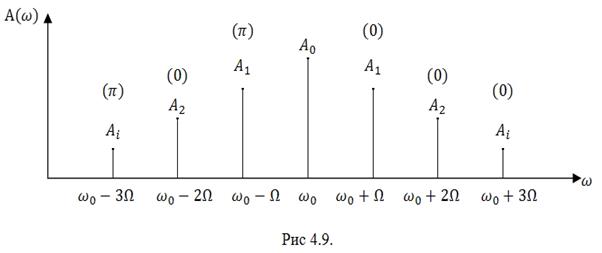
Проанализируем характер амплитудного спектра ЧМ – сигнала. В первую очередь отметим, что спектр является симметричным относительно частоты несущего колебания и теоретически является бесконечным.
Составляющие боковых боковых полос расположены на расстоянии Ω друг от друга, а их амплитуды ![]() зависят от индекса частотной модуляции. И наконец, у спектральных составляющих нижней и верхней боковых частот с чётными индексами начальные фазы совпадают, а у спектральных составляющих с нечётными индексами отличаются на угол
зависят от индекса частотной модуляции. И наконец, у спектральных составляющих нижней и верхней боковых частот с чётными индексами начальные фазы совпадают, а у спектральных составляющих с нечётными индексами отличаются на угол ![]() .
.
В таблице 4.1 приведены значения функции Бесселя для различных i и ![]() . Обратим внимание на составляющую несущего колебания
. Обратим внимание на составляющую несущего колебания ![]() . Амплитуда этой составляющей равна
. Амплитуда этой составляющей равна ![]() . Из таблицы 4.1 следует, что при
. Из таблицы 4.1 следует, что при ![]() амплитуда
амплитуда ![]() , т.е. спектральная составляющая несущего колебания в спектре ЧМ – сигнала отсутствует. Но это не означает отсутствия несущего колебания в ЧМ – сигнале (4.30). Просто энергия несущего колебания перераспределяется между составляющими боковых полос.
, т.е. спектральная составляющая несущего колебания в спектре ЧМ – сигнала отсутствует. Но это не означает отсутствия несущего колебания в ЧМ – сигнале (4.30). Просто энергия несущего колебания перераспределяется между составляющими боковых полос.
Таблица 4.1
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0.765 |
0.440 |
0.115 |
0.019 |
0.002 |
0 |
0 |
0 |
|
2 |
0.224 |
0.577 |
0.353 |
0.129 |
0.034 |
0.007 |
0.001 |
0 |
|
3 |
-0.26 |
0.339 |
0.486 |
0.309 |
0.132 |
0.043 |
0.011 |
0.002 |
|
4 |
-0.397 |
-0.066 |
0.364 |
0.43 |
0.281 |
0.132 |
0.041 |
0.015 |
|
5 |
-0.178 |
-0.328 |
0.047 |
0.365 |
0.391 |
0.261 |
0.131 |
0.053 |
|
6 |
0.151 |
-0.277 |
-0.243 |
0.115 |
0.358 |
0.362 |
0.246 |
0.129 |
Как уже подчёркивалось выше спектр ЧМ – сигнала теоретически является бесконечным. На практике же полоса пропускания радиотехнических устройств всегда ограничена. Оценим практическую ширину спектра, при котором воспроизведение ЧМ – сигнала можно считать неискажённым.
Средняя мощность ЧМ – сигнала определяется как сумма средних мощностей спектральных составляющих
![]() .
.
Проведённые расчёты показали, что около 99% энергии ЧМ – сигнала сосредоточено в частотных составляющих с номерами ![]() . А это означает, что частотными составляющими с номерами
. А это означает, что частотными составляющими с номерами ![]() можно пренебречь. Тогда практическая ширина спектра при однотональной ЧМ с учётом его симметрии относительно
можно пренебречь. Тогда практическая ширина спектра при однотональной ЧМ с учётом его симметрии относительно ![]()
![]() ,
,
а при больших значения ![]()
![]() , (4.37)
, (4.37)
Т.е. равна удвоенной девиации частоты.
Таким образом, ширина спектра ЧМ – сигнала приблизительно в ![]() раз больше ширины спектра АМ – сигнала. Вместе с тем, для передачи информации используется вся энергия сигнала. В этом состоит преимущества сигналов частотной модуляции над сигналами амплитудной модуляции.
раз больше ширины спектра АМ – сигнала. Вместе с тем, для передачи информации используется вся энергия сигнала. В этом состоит преимущества сигналов частотной модуляции над сигналами амплитудной модуляции.
4.5. Сигналы с дискретной модуляцией
Рассмотренные выше сигналы с непрерывной модуляцией, в основном используются в системах радиовещания, радиотелефонии, телевидения и других. Вместе с тем, переход на цифровые технологии в радиотехнике, в том числе и в перечисленных областях, обусловил широкое использование сигналов с дискретной модуляцией или манипуляцией. Так как исторически сигналы дискретной модуляции впервые были использованы для передачи телеграфных сообщений, такие сигналы ещё называют сигналами амплитудной (АТ), частотной (ЧТ), и фазовой (ФТ) телеграфии. Ниже при описании соответствующих сигналов будет использована эта аббревиатура, что позволит отличать их от сигналов с непрерывной модуляцией.
4.5.1. Сигналы с дискретной амплитудной модуляцией
Сигналы дискретной амплитудной модуляции характеризуются тем, что амплитуда несущего колебания изменяется в соответствии с управляющим сигналом, который представляет собой последовательности импульсов, обычно прямоугольной формы. При исследовании характеристик сигналов с непрерывной модуляцией в качестве управляющего сигнала ![]() рассматривался гармонический сигнал. По аналогии с этим для сигналов с дискретной модуляцией в качестве управляющего сигнала используем периодическую последовательность прямоугольных импульсов
рассматривался гармонический сигнал. По аналогии с этим для сигналов с дискретной модуляцией в качестве управляющего сигнала используем периодическую последовательность прямоугольных импульсов
Очевидно, как следует из (4.39), длительность импульса составляет ![]() , а скважность
, а скважность ![]() .
.
На рис. 4.10 представлены эпюры управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и амплитудно-манипулированного сигнала
и амплитудно-манипулированного сигнала ![]() . Здесь и далее будем полагать амплитуду импульсов управляющего сигнала
. Здесь и далее будем полагать амплитуду импульсов управляющего сигнала ![]() равной
равной ![]() , а начальную фазу несущего колебания
, а начальную фазу несущего колебания ![]() . Тогда сигнал с дискретной амплитудной модуляцией можно записать следующим образом
. Тогда сигнал с дискретной амплитудной модуляцией можно записать следующим образом
![]() (4.40)
(4.40)
Ранее было получено разложение последовательности прямоугольных импульсов в ряд Фурье (2.13). Для рассматриваемого случая ![]() и
и ![]() выражение (2.13) принимает вид
выражение (2.13) принимает вид
![]() , (4.41)
, (4.41)
где ![]() .
.
Подставляя (4.41) в (4.40) и используя формулу произведения косинусов, получим:

![]() . (4.42)
. (4.42)
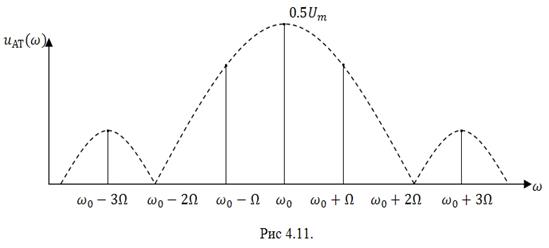
На рис. 4.11 изображён амплитудный спектр сигнала, модулированного по амплитуде последовательностью прямоугольных импульсов. Спектр содержит составляющую несущей частоты с амплитудой ![]() и две боковые полосы каждая из которых состоит из бесконечного числа гармонических составляющих, располагающихся на частотах
и две боковые полосы каждая из которых состоит из бесконечного числа гармонических составляющих, располагающихся на частотах ![]() , амплитуды которых изменяются по закону
, амплитуды которых изменяются по закону ![]() . Боковые полосы, так же как и при непрерывной АМ, расположены зеркально по отношению к спектральной составляющей несущей частоты. Нули амплитудного спектра сигнала АТ соответствуют нулям амплитудного спектра сигнала
. Боковые полосы, так же как и при непрерывной АМ, расположены зеркально по отношению к спектральной составляющей несущей частоты. Нули амплитудного спектра сигнала АТ соответствуют нулям амплитудного спектра сигнала ![]() , но сдвинуты влево и вправо на величину
, но сдвинуты влево и вправо на величину ![]() .
.
Ввиду того, что основная часть энергии ![]() управляющего сигнала сосредоточена в пределах первого лепестка спектра, практическую ширину спектра в рассматриваемом случае, исходя из рис. 4.11, можно определить как
управляющего сигнала сосредоточена в пределах первого лепестка спектра, практическую ширину спектра в рассматриваемом случае, исходя из рис. 4.11, можно определить как
![]() . (4.43)
. (4.43)
Этот результат согласуется с расчётами спектра, приведёнными в [Л.4], где показано, что большая часть мощности сосредоточена в боковых составляющих с частотами ![]() и
и ![]() .
.
4.5.2. Сигналы с дискретной частотной модуляцией
При анализе сигналов с дискретной угловой модуляцией удобно в качестве модулирующего сигнала ![]() использовать периодическую последовательность прямоугольных импульсов вида “меандр”. Тогда управляющий сигнал на интервале времени
использовать периодическую последовательность прямоугольных импульсов вида “меандр”. Тогда управляющий сигнал на интервале времени ![]() принимает значение
принимает значение ![]() , а на интервале времени
, а на интервале времени ![]() - значение
- значение ![]() . Снова, как и при анализе сигналов АТ будем полагать
. Снова, как и при анализе сигналов АТ будем полагать ![]() .
.
Как следует из подраздела 4.3.1 сигнал с частотной модуляцией описывается выражением (4.24). Тогда с учётом того, что на интервале ![]() управляющий сигнал
управляющий сигнал ![]() , а на интервале
, а на интервале ![]() управляющий сигнал
управляющий сигнал ![]() , проведя операцию интегрирования, получим выражение сигнала ЧТ
, проведя операцию интегрирования, получим выражение сигнала ЧТ

На рис 4.12 приведены временные диаграммы управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и сигнала дискретной частотной модуляции
и сигнала дискретной частотной модуляции ![]() .
.
С другой стороны сигнал ЧТ, как это следует из рис. 4.12, может быть представлен суммой двух сигналов дискретной амплитудной модуляции ![]() и
и ![]() , частоты несущих колебаний которых соответственно равны
, частоты несущих колебаний которых соответственно равны
|
|
(4.45) |
а
s1(t) = -1, при ![]() ,
,
s2(t) = 1, при ![]() . (4.46)
. (4.46)
Тогда сигнал с дискретной частотной модуляцией можно представить следующим образом
![]() ,
,
или с учётом (4.40)
|
|
Управляющие сигналы ![]() и
и ![]() представляют собой периодические последовательности прямоугольных импульсов одинаковой амплитуды, длительности и периода следования, но разной полярности. Тогда, в соответствии с (4.46) можно записать
представляют собой периодические последовательности прямоугольных импульсов одинаковой амплитуды, длительности и периода следования, но разной полярности. Тогда, в соответствии с (4.46) можно записать
![]() ;
; ![]()
и выражение (4.47) принимает вид:
![]()
или
![]() , (4.48)
, (4.48)
где ![]() описывается выражением (4.41).
описывается выражением (4.41).
Подстановка (4.41) в (4.48) после преобразований с использованием формулы произведения косинусов даёт
|
|
(4.49) |
На рис. 4.13 изображён амплитудный спектр сигнала дискретной частотной модуляции.
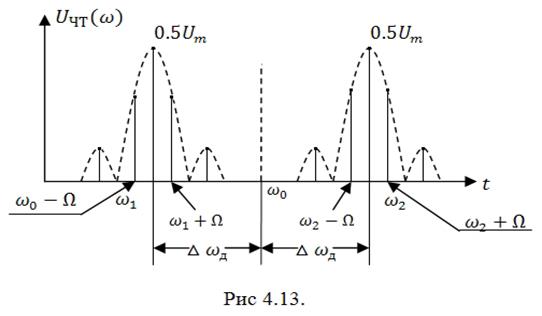
Спектр содержит две боковые полосы, расположенные симметрично относительно частоты ![]() несущего колебания. В свою очередь, каждая из боковых полос состоит из двух боковых подполос, расположенных симметрично относительно частот
несущего колебания. В свою очередь, каждая из боковых полос состоит из двух боковых подполос, расположенных симметрично относительно частот ![]() и
и ![]() . В каждой боковой подполосе располагаются спектральные составляющие на частотах
. В каждой боковой подполосе располагаются спектральные составляющие на частотах ![]() и
и ![]() .
.
Очевидно, как и при непрерывной ЧМ спектр сигналов с дискретной частотной модуляцией гораздо шире спектра сигналов с дискретной амплитудной модуляцией.
Если принять во внимание, что большая часть мощности сосредоточена в боковых составляющих на частотах ![]() и
и ![]() , как указывалось в подразделе 4.41, то практическая ширина спектра в рассматриваемом случае равна
, как указывалось в подразделе 4.41, то практическая ширина спектра в рассматриваемом случае равна
![]() .
.
Если к тому же учесть (4.45), то можно получить
![]() .
.
При ![]() практическая ширина спектра составит
практическая ширина спектра составит
![]() ,
,
или
![]() .
.
Несмотря на значительную ширину спектра сигналы с дискретной частотной модуляцией нашли широкое применение в практической радиотехнике.
4.5.3. Сигналы с дискретной фазовой модуляцией
Выше (подраздел 4.3.1) было установлено, что сигнал с фазовой модуляцией описывается выражением
![]() ,
,
где ![]() - девиация фазы,
- девиация фазы,
![]() - начальная фаза колебания несущей частоты.
- начальная фаза колебания несущей частоты.
Если при формировании сигнала дискретной фазовой модуляции используется периодическая последовательность униполярных прямоугольных импульсов вида (4.38) и (4.39), то выражение для сигнала дискретной фазовой модуляции принимает вид

При использовании “меандра” в качестве управляющего сигнала сигнал дискретной частотной модуляции записывается следующим образом

Очевидно и в том и в другом случае управляющий сигнал принимает два значения на интервале периода следования импульсов. Это означает что в сигнале дискретной фазовой модуляции на этом же интервале начальная фаза принимает два значения, которые определяются величиной ![]() . Обычно, для рассматриваемого случая эти значения отличаются на угол
. Обычно, для рассматриваемого случая эти значения отличаются на угол ![]() . Тогда для сигнала (4.50) величина
. Тогда для сигнала (4.50) величина ![]() , а для сигнала (4.51) величина девиации фазы составит
, а для сигнала (4.51) величина девиации фазы составит ![]() , и выражения (4.50) и (4.51) принимают соответственно следующий вид
, и выражения (4.50) и (4.51) принимают соответственно следующий вид
С точки зрения анализа и определения характеристик сигналов с дискретной ФМ представления (4.52) и (4.53) равноценны. Поэтому в дальнейшем мы воспользуемся представлением (4.53).
На рис. 4.14 изображены временные диаграммы управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и сигнала
и сигнала ![]() с дискретной фазовой модуляцией. Здесь в соответствии с (4.53) в качестве несущего колебания выступает
с дискретной фазовой модуляцией. Здесь в соответствии с (4.53) в качестве несущего колебания выступает
![]() . (4.54)
. (4.54)
Найдём амплитудный спектр сигналов дискретной ФМ. Для этого представим сигнал дискретной ФМ в виде суммы несущего колебания (4.54) и сигнала дискретной амплитудной модуляции с удвоенной амплитудой и противоположной начальной фазой несущего колебания (рис. 4.15)
![]() . (4.55)
. (4.55)
Тогда сигнал дискретной ФМ можно записать
![]() .
.
Перепишем это выражение в виде
![]() .
.
Здесь использовано известное тригонометрическое соотношение
sin x = - sin (x+π).
Подставляя в это выражение разложение (4.41) управляющего сигнала, после преобразований и перестановки местами ![]() и
и ![]() , получим
, получим
|
|
C учётом того, что
![]() ,
,
это выражение можно привести к виду
![]()
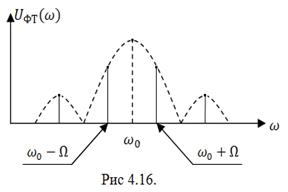
![]() . (4.56) Соотношение (4.56) позволяет построить диаграмму амплитудного спектра сигнала дискретной ФМ, изображённую на рис. 4.16.
. (4.56) Соотношение (4.56) позволяет построить диаграмму амплитудного спектра сигнала дискретной ФМ, изображённую на рис. 4.16.
Из выражения (4.56) и рис. 4.16 следует, что амплитудный спектр сигналов дискретной фазовой модуляции не содержит составляющей несущего колебания, а содержит только две боковые полосы, расположенные зеркально относительно частоты ![]() . Очевидно, что в случае модуляции несущего колебания управляющим сигналом в виде периодической последовательности прямоугольных импульсов ширина спектра сигнала дискретной ФМ составляет
. Очевидно, что в случае модуляции несущего колебания управляющим сигналом в виде периодической последовательности прямоугольных импульсов ширина спектра сигнала дискретной ФМ составляет
Δωфт = 2Ω .
Сравнение (4.42) дискретной АМ с (4.56) дискретной ФМ без учёта фазовых соотношений показывает, что огибающие спектров и боковые полосы совпадают при одном и том же ![]() . Различие состоит лишь в том, что в спектре дискретной АМ составляющая несущего колебания присутствует, а в спектре дискретной ФМ нет.
. Различие состоит лишь в том, что в спектре дискретной АМ составляющая несущего колебания присутствует, а в спектре дискретной ФМ нет.
Для демодуляции сигналов дискретной ФМ необходимо иметь колебание, относительно фазы которого будет измеряться фаза принимаемого сигнала дискретной ФМ. Это колебание называется опорным. В качестве опорного сигнала выступает колебание той же частоты, что и несущее колебание с амплитудой ![]() и начальной фазой
и начальной фазой ![]()
![]() . (4.57)
. (4.57)
Перемножим сигнал дискретной ФМ и опорный сигнал
![]() . (4.58)
. (4.58)
Подставляя (4.53) и (4.57) в (4.56) и используя формулу произведения синусов
![]() ,
,
после преобразований получим

 (4.57)
(4.57)
Результирующий сигнал ![]() содержит низкочастотную составляющую и составляющую удвоенной частоты
содержит низкочастотную составляющую и составляющую удвоенной частоты ![]() .
.
Колебание удвоенной частоты может быть подавлено фильтром нижних частот. Тогда сигнал на выходе ФНЧ имеет следующий вид:

Если установить начальную фазу опорного сигнала ![]() , на выходе ФНЧ будет иметь место демодулированный сигнал
, на выходе ФНЧ будет иметь место демодулированный сигнал ![]()
Из сказанного выше следует, что функциональная схема демодулятора сигналов дискретной ФМ должна содержать перемножитель П, генератор опорного сигнала ГОС фазовращатель ФВ и фильтр нижних частот ФНЧ. Эпюры напряжений на выходах элементов демодулятора приведены на рис. 4.17, а функциональная схема – на рис. 4.18.
В реальных радиотехнических системах опорный сигнал ![]() формируется устройством синхронизации. При этом возможны два варианта построения демодуляторов.
формируется устройством синхронизации. При этом возможны два варианта построения демодуляторов.
В первом варианте опорный сигнал формируется на передающей стороне и передаётся приёмную сторону по отдельному каналу. При этом для передачи опорного сигнала необходимы дополнительные энергетические и частотные затраты. При втором варианте опорный сигнал выделяется из информационного сигнала ![]() . В этом случае указанных дополнительных затрат не требуется, однако, техническая реализация демодулятора сложнее, чем в первом.
. В этом случае указанных дополнительных затрат не требуется, однако, техническая реализация демодулятора сложнее, чем в первом.
И в заключение отметим следующее. В подразделе 1.2 указывает что в радиотехнических системах, предназначенных для передачи цифровых сообщений, совокупность сигналов образуют ансамбль, важнейшей характеристикой которого является его объём М. Рассмотренные выше сигналы дискретной АМ, дискретной ЧМ и дискретной ФМ образуют ансамбли с М=2, т.к. управляющий сигнал может принимать только два значения. Вместе с тем, рассмотренными сигналами не ограничивается обширный класс сигналов дискретной модуляции. Дело в том, в качестве управляющих сигналов могут выступать сигналы с числом значений 4,8,…2n . Это приводит к тому, что для передачи информации используются ансамбли сигналов соответствующих объёмов. Для того чтобы отличить один ансамбль от другого не только по управляемому параметру (амплитуда, частота, начальная фаза), но и по объёму, вводится понятие кратности модуляции которая определяется как n = log2M. Тогда рассмотренные выше сигналы являются сигналами однократной дискретной модуляции. Если М=4, то сигналы являются сигналами двукратной модуляции, при М=8 – сигналами трёхкратной модуляции и т.д. На практике широкое распространение получили сигналы многократной фазовой модуляции: двукратной (ДФТ), трёхкратной (ТФТ) и большей кратности. С вопросами формирования демодуляции таких сигналов и оценки их эффективности можно познакомиться в специальной литературе.