8.1. Принцип действия и виды синхронных двигателей
8.2. Специальные синхронные двигатели
8.1. Принцип действия и виды синхронных двигателей
Синхронные двигатели СД небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол - двигатель совершает шаг. К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения - это так называемые вентильные двигатели.
Статор синхронной машины выполнен аналогично статору асинхронной машины. На нем расположена ![]() -фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
-фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
|
nр = nс= (60f)/p. |
(3.1.2) |
Где f – частота напряжения статора, а p – число пар полюсов.
1. У СД с обмоткой на роторе ротор состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы таких машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). Электромагнитная схема синхронной машины имеет вид (рис90):
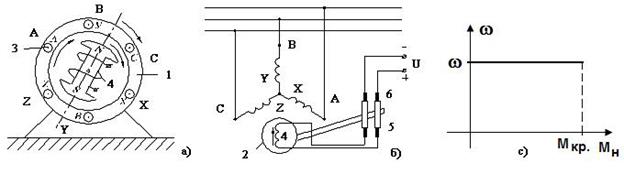
Рис. 90. Электромагнитная схема СД (а), схема ее включения (б), характеристика (с)
Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6.
2. Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
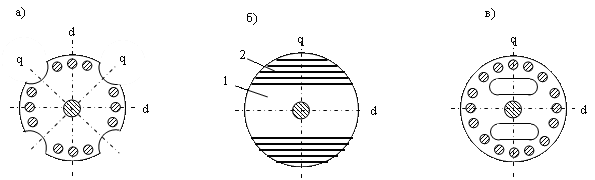
Рис. 91. Роторы синхронных реактивных микродвигателей
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. Рис 92..
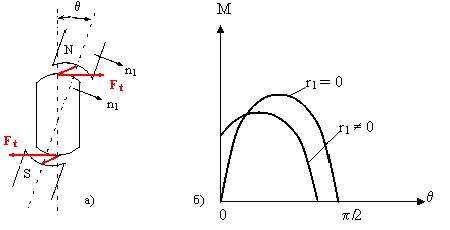
Рис. 92. Принцип действия синхронного реактивного двигателя
Электромагнитный момент синхронного реактивного двигателя без учета активного сопротивления статора r1 выражается следующей зависимостью:
|
|
(3.2.1) |
где xd и xq - синхронные индуктивные сопротивления по продольной и поперечной осям машины. Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе. Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3...0,4, а мощностью до 10 ватт - менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
3. СД постоянными магнитами. По способу пуска эти двигатели делятся: на самозапускающиеся двигатели и двигатели с асинхронным пуском. Самозапускающиеся двигатели выполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении, например . клювообразные полюса статора -. КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пуском имеют на роторе короткозамкнутую обмотку типа "беличьей клетки", которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
4. Пуск и вход в синхронизм СД.
Недостатком СД является то, что управление скоростью возможно только через изменение частоты вращения поля, а следовательно, частоты питающего напряжения. Недостатком СД является то, что двигатель должен войти в синхронизм, недостатком является также малый пусковой момент, поэтому, чтобы запустить двигатель, необходимы дополнительные меры. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они или снабжаются пусковой обмоткой или используется схема включения СД с асинхронным запуском. Рис. 93.
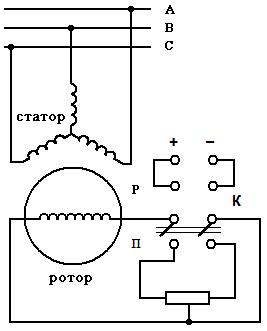
Рис. 93. Схема включения СД с асинхронным запуском
Здесь, на роторе находится обмотка, которая в момент запуска замыкается либо накоротко, либо на внешнее сопротивление. В этом случае двигатель ведет себя как асинхронный и у него есть значительный пусковой момент. Когда ротор разгоняется до скорости, близкой к скорости поля, ключ переключается в другое положение и на ротор подается постоянное напряжение. Такой СД при пуске асинхронно разгоняется до 90-95% от скорости поля, затем входит в синхронизацию и далее ведет себя, как синхронный. Есть другая модификация, у которой на роторе есть дополнительная короткозамкнутая обмотка, например, беличья клетка. Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший скорости близкой к синхронной должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому момент входа в синхронизм в сильной степени зависит от момента инерции ротора и момента нагрузки.
8.2. Специальные синхронные двигатели
В автоматике используется СД малой мощности, от 0,1 до 500 Вт, Есть различные типы СД: редукторные, гистерезисные, бесконтактные, различные виды шаговых двигателей.
8.2.1. Гистерезисные двигатели
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.94).
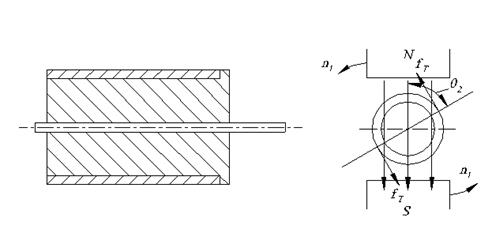
Рис. 94. Ротор гистерезисного двигателя и схема возникновения гистерезисного момента
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Так как ротор выполнен из магнита твердого материала, то элементарные магнитики перемагничиваются не мгновенно, а с отставанием из-за гистерезиса, это и создает гистерезисный момент. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше Мг, то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Движущий момент ротора создается двумя составляющими: моментом вихревых токов и гистерезисным моментом. Рис. 95.
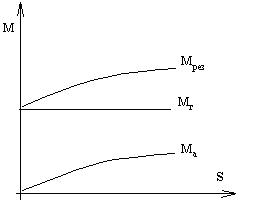
Рис. 95. Механическая характеристика гистерезисного двигателя
Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
![]()
![]()
![]() ,
,
где П2Н - потери на перемагничивание ротора при неподвижном роторе; Пвихр.Н - потери на вихревые токи при неподвижном роторе;
Двигатель используется в приводах небольшой мощности до 2000 Вт, частота f=50, 400 и 500 Гц.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, значительный пусковой момент, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки, значительный нагрев ротора.
8.2.2. Шаговые двигатели
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по числу фаз и типу магнитных системна ШД с активным ротором (с постоянными магнитами), ШД реактивного типа и индукторные.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
1. Шаговые двигатели с активным ротором. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Ротор обычно представляет собой многополюсную звездочку из специального сплава. Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Рассмотрим принцип действия простейшего двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. При включении фазы под постоянное напряжение (условно положительной полярности) вектор намагничивающей силы НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q - угол между осью ротора и вектором НС. Рис. 96.
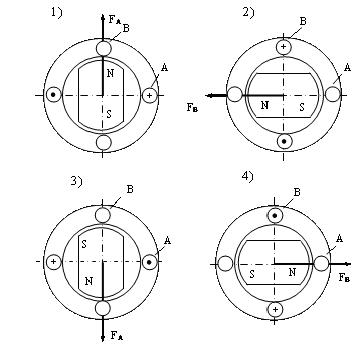
Рис. 96. Принцип работы ШД
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 96, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт). При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн = arcsin(Mн/Mmax).
В зависимости от типа электронного коммутатора управление ШД может быть:
- одноплярным или разнополярным;
- симметричным или несимметричным;
- потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n при разных способах коммутации может быть равно 1, 2, 4m, где m - число фаз: В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями): a = 360/pn.
ШД с активным ротором удается выполнить с шагом до 15о. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
2. Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 - 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и у обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Индукторные (гибридные) шаговые двигатели. совмещают преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага).
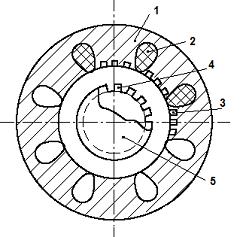
Рис. 96. Конструкция реактивного ШД
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
3. Режимы работы ШД.
1. Статический режим – это режим, при котором ротор фиксируется в одной из позиций, а по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле.
2. Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю.
3. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма. При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
4. Переходный режим - это основной эксплуатационный режим работы ШД. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Основное требование к ШД в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов.
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.97). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельную механическую характеристику рассматривают обычно при f>f0.
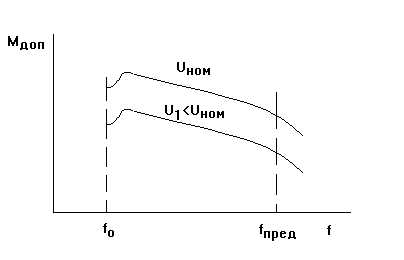
Рис. 97. Механические характеристики ШД
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр. Частота приземистости является важным показателем переходного режима ШД Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения
8.3. Бесконтактные двигатели переменного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
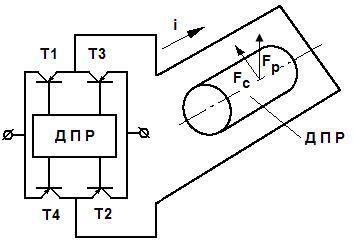
Рис. 98. Состав бесконтактного двигателя постоянного тока
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
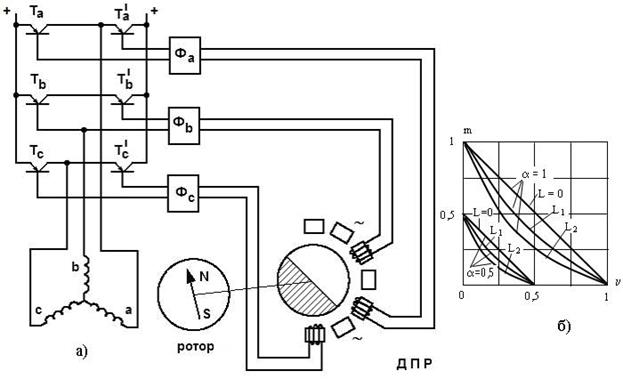
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.