При синтезе систем связи с частотным разделением канала (с ЧРК) делаются следующие операции:
1. Расчет области частот среды распространения (в радиоаппаратуре - отведенная полоса частот, в кабельных линиях связи – это полоса частот от минимально разрешенной до максимально разрешенной для данной аппаратуры, для оптоволоконных линий – это окно прозрачности 1.55 мкм.).
2. Формирование группового сигнала (из канальных сигналов).
Групповой сигнал формируется из элементов телефонных каналов (0.3 – 3.4 кГц).

Из анализа работы систем связи с частотным разделением каналов виден существенный недостаток:
сложность формирования группового сигнала.
Вопрос - формирование N-канального сигнала.
При серийном производстве LC-фильтров настройка каждого происходит индивидуально. В связи с внедрением цифровых фильтров проблема выделения боковых частот существенно упрощается.
В настоящее время используются трансмультиплексоры, которые являются сложными цифровыми фильтрами, работающими в реальном масштабе времени.
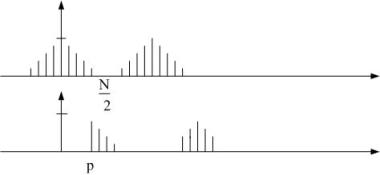
При формировании группового сигнала надо исходный спектр сигнала сдвинуть на p-тактовых интервалов в правую сторону.

![]()
![]()
![]()
![]()
При сдвиге вправо на p-тактовых интервалов надо домножить исходный сигнал на две составляющие:
![]()
Данный алгоритм выигрывает по сравнению с известными аналоговыми способами формирования нижней и верхней области частот. Структура преобразования проще и легче перестраиваема. Вся перестройка в замене p.
Эта операция переноса спектра является умножением (разложением) сигнала на синфазную и квадратурную составляющую.
Литература:
Маркин С. “Цифровые сигнальные процессы”.
Цифровые сигнальные процессы.
Этапы развития можно разбить:
1. разработка сигнального процессора МПД 7720 (для синтеза устройств преобразования сигналов)
2. ТМS3301, ТМS 3302
3. ТМS 3303 за 2 мкс., АДSP-21.
Обработка сигналов для радиотелефонов осуществляется с помощью МП DSP.
DSP используется при синтезе так называемых модемов (устройств стыков между ПЭВМ и существующей сетью локальных или глобальных), DSP используется при синтезе трансмультиплексоров.
Сравнительная таблица различных типов DSP.
| возможности | 21.01 | 21.03 | 21.05 | 21.11 | 21.
MSP50 |
21.61
21.62 |
21.63
21.64 |
21.71
21.73 |
21.72 | 21.15 | 21.81 |
| Память
программ RAM |
2кБай-
та |
2к | 1к | 2к | 2к | - | - | 2к | 2к | 1к | 16к |
| память пр-м
неперест-мая ROM |
- | - | - | - | - | 8к | 4к | - | 8к | - | - |
| память дан-ных RAM | 1к | 1к | 0.5к | 1к | 1к | 0.5к | 0.5к | 2к | 2к | 0.5к | 16к |
| наличие
таймера |
+ | + | + | + | + | + | + | + | + | + | + |
| послед.порт “0”многокан. | + | + | - | + | + | + | + | + | + | + | + |
| посл.порт”1” | + | + | + | + | + | + | + | + | + | + | + |
| порт XOTин-терфейса | + | + | + | + | |||||||
| порт ПДП | + | ||||||||||
| режим низ-кого энерго-потребления | + | + | + | + | |||||||
| аналог. Ин-терфейс | + | ||||||||||
| макс. F,МГц | 20 | 10.24 | 13.82 | 20 | 20 | 18.67;
10.24 |
18.63;
10.24 |
18.67;
10.24 |
18.67 | 20 | 18.67 |
| длина цикла,
нс |
50 | 97.6 | 72.3 | 50 | 50 | 80;
97.6 |
80;
97.6 |
30;50 | 30 | 50 | 30 |
| Напряжение питания,В | 5 | 3.3 | 5 | 5 | 5 | 5;3.3 | 5;3.3 | 5;3.3 | 5 | 5 | 5 |
ПДП - прямой доступ к памяти – это режим в многопроцессорной системе, когда требуется из верхнего звена считать данные из более нижнего звена с отключением процессора низового звена.
Стык (согласование) с вышестоящим процессором, когда функции периферийного устройства выполняют выше названные.
В любом процессоре DSP три режима работы:
1. активный, работает на полную мощность;
2. режим приема команд скорость обработки сигналов уменьшается
3. режим молчания (при самом экономном энергопотреблении).
Из анализа совокупности характеристик наиболее перспективным является процессор 21 MSP 50 (ADSP-21-MSP-50) , наиболее быстродействующим является ADSP-2181.
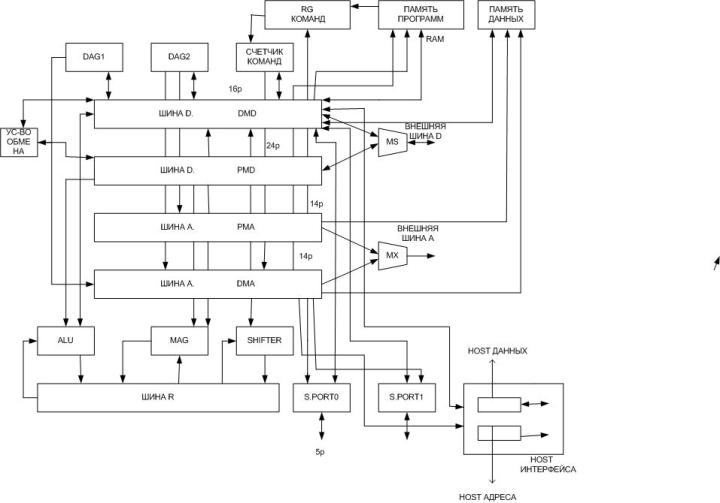
Структурная схема сигнальных процессоров.
Стандартна для всех, отличие одной структуры от другой – в наличии или в отсутствии каких-то составных блоков. Для уменьшения времени выполнения в структуре предусмотрены два генератора в адресном пространстве DAG1 и DAG2 (аппаратный накопитель умножителей), позволяют за один такт умножить два 40-разрядных числа и прибавить полученное произведение к предыдущему результату.
Блок MAC – умножитель накопителей.
АЛУ – арифметическое логическое устройство, позволяет произвести сложение либо вычитание
логич.+, *, сложение по модулю 2.
Для обмена с внешними устройствами существуют специальные порты (SPORT) , у отдельных процессоров специальных портов несколько: последовательные “0”,”1” и последовательный XOT интерфейс.
В каждом из перечисленных выше процессоров имеется возможность организации памяти барабанного типа SHIFTER.
Устройство обмена позволяет переслать данные с одной шины на другую (с шины DMD на PMD и наоборот), согласовывать разный формат данных (PMD (24 разряда) и DMD (16 разрядов)).
Процессор в отличие от существующих процессоров имеет 5 шин:
Шина DMD-datamemorydata, вводятся исходные данные или окончательные результаты.
Шина PMD – шина инструкций programmemorydata, может использоваться и для данных, подлежащих вычислению (для повышения производительности).
Шина адресов PMA – programmemoryaddress, при начальной загрузке процессора, а также при чтении рабочей программы из памяти программ RAM.
DMA – datamemoryaddress, предназначена для чтения памяти данных ROM, для организации обмена по последовательному интерфейсу через SPORT0 и SPORT1.
Согласно рекомендации МККТТ последовательный обмен производится с помощью телеграфного 5р.кода, может вводиться асинхронно.
ALU совместно с аппаратным умножителем МАG и АЗУ барабанного типа SHIFTER образует 5 шину: шину R, позволяет переслать промежуточные результаты вычислений или из ALU в MAG или наоборот; либо с задействованием SHIFTER, при этом операции происходят бок о бок. Для построения иерархической системы связи, когда DSP связь осуществляется через HOST интерфейс (является устройством, кроме HOST интерфейса имеет возможность связаться с шиной адреса через два мультиплексора).
В HOST интерфейсе используется параллельная RG защелка. Такая защелка позволяет синхронизировать информацию.
Надо предусмотреть стандартное устройство ввода /вывода.
ADSP
Сигнал Reset поступает программно от старшей по иерархии программной сетки. RG команд и счетчик обнуляются и указывают на нулевую ячейку памяти программ, где указан номер строки, с которой начинается первоначальная загрузка.
Установка всех составных блоков в исходное состояние.
Для того, чтобы разделить поток данных и поток инструкций (команд), используются 4 шины. Сигналы с одной шины в процессе обработки могут пересылаться на другую шину по специальной команде. Процесс разделения шин позволил существенно увеличить скорость обработки, для этой операции служат генераторы DAG1 и DAG2. Адресация в ОЗУ возможна в двух вариантах:
1. абсолютная адресация
2. косвенная адресация
Для уменьшения времени на выполняемую команду DAG1 и DAG2 автоматически инициируется.
Структура построения микропроцессорного комплекса.
Как и любая вычислительная система, сигнал. М.П.комплекс содержит три составляющие:
1. центральный процессорный элемент
2. постоянное запоминающее устройство первоначальной инициализации и хранения памяти программ
3. операторное запоминающее устройство
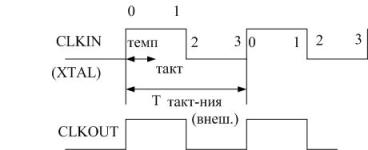
CLKIN и XTAL предназначены для подключения внешнего кварцевого резонатора, либо для подключения внешней тактовой частоты.
В случае, если используется внешняя тактовая частота, то тактовые импульсы подаются CLKIN, а вход XTAL остается свободным. Внутри центрального процессорного элемента происходит умножение тактовой частоты на 4. Совместно с тактовой частотой производится синхронизированный вывод выполняемых операций на выходе CLKOUT.
Вход RESET – вход сброса аппаратной реализации, по этому входу МПК сбрасывается в исходное состояние при первоначальном включении.
Вход MMAP – memory map control signal.
MMAP – вход для программного сброса, происходит обнуление сигналов от более старшего МП комплекта.
SPORT1 и SPORT0 – два последовательных устройства ввода/вывода, которые позволяют производить не только обмен данных, но и делать прерывание, более старшие прерывания IRQ-0, следующие IRQ-4.
В отличие от известных управл.процессоров прерывание может производиться как с последующего устройства ввода/вывода, так и ADSP. В случае если процессор работает в многопроцессорной системе, то используется постпроцессор.
а) отладка рабочей программы, тогда вместо постпроцессора используется ЭВМ
б) используется многопроцессорная система - сигнал.процессор (ближнего и дальнего уровня)
Центральный процессорный элемент имеет три шины: ША(14р.), ШД(24р.), Ш Управления (включает три сигнала, разделенные во времени:![]() ); определяет порядок работы внешней памяти.
); определяет порядок работы внешней памяти.
Если ![]() 0, то производится обращение памяти к первоначальной инициализации
0, то производится обращение памяти к первоначальной инициализации
![]()
Для того, чтобы прочесть в памяти данных, вырабатывается сигнал![]() , а записать –
, а записать –![]() .
.
При первоначальной инициализации ввод производится по 4 байта, при этом в начале первый байт.

Структура АЛУ.
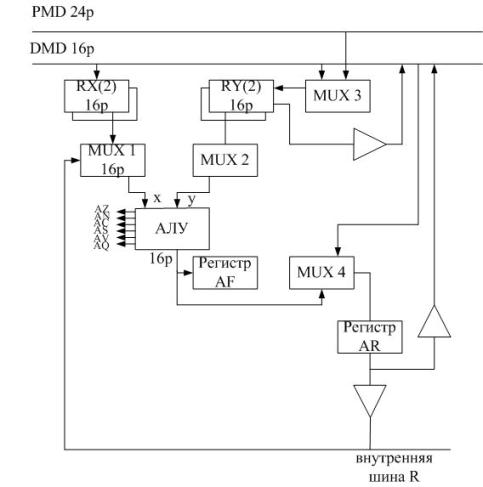
АЛУ – самостоятельный блок, входящий в процессор ATSP, позволяет выполнить:
1. R=x+y 9. R=x XQR y
2. R=x-y 10. R=PASS x
3. R=y-x 11. R=PASS y
4. R=x+y+CI 12. R=NOT x
5. R=x-y-CI+1 13. R=NOT y
6. R=y-x-CI+1 14. R=x+1
7. R=x OR y 15. R=y+1
8. R=x AND y
АЛУ состоит из блока RGx (2![]() 16 раз.), блока RGy (2
16 раз.), блока RGy (2![]() 16 раз.). Каждый из этих RG обрамлен мультиплексором, с его помощью сигнал может приниматься с двух направлений.
16 раз.). Каждый из этих RG обрамлен мультиплексором, с его помощью сигнал может приниматься с двух направлений.
Первый блок RGRx совместно с мультиплексором MX1 позволяет выдать на вход сигнал либо с выхода Rx, либо с внутренней шины R.
MUX2 позволяет сделать аналогичные операции с выхода Ry и AR.
MU3 позволяет объединить шины DMD и PMD для записи второго операнда y, обе шины имеют разную разрядность (16 р. и 24 р.). Согласование разрядности происходит автоматически. Для выбора RGRy существуют два банка данных, для выбора нулевого банка данных надо указать команду MSTAX0.
При выполнении арифметических и логических операций формируются признаки:
1. AZ - признак нуля
2. AN- признак отрицательного результата
3. AC - признак переноса из 16 в 17 раз
4. AS - признак знака
5. AV - признак переполнения
6. AQ- признак частного
Структура умножителя MAC.
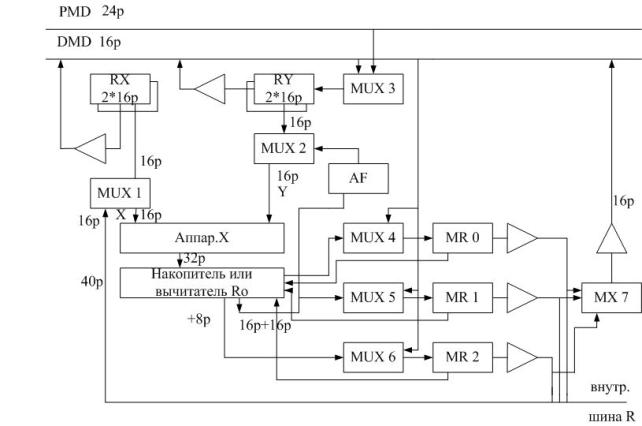
1. R=xy
2. R=MR+xy
3. R=MR-xy
4. MR=0
MAC состоит:
1. блок 2![]() 16р. RG
16р. RG
для согласования 16р MR0 – MR1
MUX1 нужен для коммутации
MUX2
MUX3 коммутирует входные сигналы либо с шины DMD, либо с PMD.
MUX4-6 коммутирует на входы RGMR0-MR2, либо с выхода накопителя (вычитателя) R0-R2, либо с шины DMD. Специально ориентирован на временные свертки.
Два банка Rx и Ry постоянно меняются местами при вычислении свертки.
Список литературы
1. Гоноровский «Радиотехнические цепи и сигналы».
2. Голденберг Справочник по ЦОС.
3. Карташов «Основы теории дискретных сигналов и цифровых фильтров».
4. Робинер «Теория и применение ЦОС».
5. Ленг «Аналоговые и цифровые фильтры».
6. Антонию «Цифровые фильтры, анализ и проектирование».