Приложение А. Обзор анализа Фурье
А.1. Сигналы, спектры и линейные системы
А.2. Применение методов Фурье к анализу линейных систем
А.3. Свойства преобразования Фурье
А.5.1. Графическая иллюстрация свертки
Приложение Б. Основы теории принятия статистических решений
Б.2.1. Элементы задачи теории принятия решений
Б.2.2. Проверка методом отношения правдоподобий и критерий максимума апостериорной вероятности
Б.3. Пример обнаружения сигнала
Б.3.1. Двоичное решение по принципу максимального правдоподобия
Приложение В. Отклик корреляторов на белый шум
Приложение Г. Полезные соотношения
Приложение Д. S-область, z-область и цифровая фильтрация
Д.1.1. Стандартное преобразование Лапласа
Д.1.2. Свойства преобразования Лапласа
Д.1.3. Использование преобразования Лапласа
Д.3.1. Передаточная функция цифрового фильтра
Д.3.2. Устойчивость однополюсного фильтра
Д.3.3. Устойчивость произвольного фильтра
Д.3.4. Диаграмма полюсов-нулей и единичная окружность
Д.3.5. Дискретное преобразование Фурье импульсной характеристики цифрового фильтра
Д.4. Фильтры с конечной импульсной характеристикой
Д.4.1. Структура фильтра с конечной импульсной характеристикой
Д.5. Фильтры с бесконечной импульсной характеристикой
Приложение А. Обзор анализа Фурье
А.1. Сигналы, спектры и линейные системы
Электрические сигналы связи — это меняющиеся со временем сигналы напряжения или тока, обычно описываемые во временной области. С другой стороны, подобные сигналы также удобно описывать в частотной области, где описание сигнала называется его спектром. Спектральные понятия достаточно важны при анализе и проектировании систем связи; они могут описывать сигнал через его среднюю мощность или энергетическое содержание на различных частотах и показывают, какую часть (полосы) электромагнитного спектра занимает сигнал. Федеральная комиссия по средствам связи США (Federal Communications Commission — FCC) требует, чтобы теле- и радиостанции работали на выделенных им частотах при крайне малых промежутках между полосами, занятыми различными станциями. Например, амплитудно-модулированные радиоканалы разделены полосой 10 кГц, а телевизионные каналы — полосой 6 МГц. Так что наш интерес к спектрам и анализу Фурье объясняется реальными требованиями помещения сигнала в точно заданные границы.
Частотные спектральные характеристики можно приписать как к собственно сигналам, так и электрическим схемам. Если говорится, что конкретный спектр описывает сигнал, подразумевается, что один из способов описания сигнала — это задать его амплитуду и фазу как функции частоты. В то же время, когда мы говорим о спектральных параметрах схемы, имеем в виду передаточную функцию (или частотную характеристику), связывающую выход схемы с ее входом; другими словами, схема характеризуется тем, какая часть спектра входного сигнала пройдет на выход.
А.2. Применение методов Фурье к анализу линейных систем
Методы Фурье используются для анализа линейных схем или систем: (1) для предсказания реакции (отклика) системы; (2) для определения динамики системы (передаточной функции) и (3) для оценки или интерпретации результатов тестов. Предсказание реакции системы (1) схематически проиллюстрировано на рис. А.1. Пусть на вход системы подается произвольный периодический сигнал с периодом Т0секунд. Методы Фурье-анализа, как показано на рисунке, позволяют описать подобный вход как сумму синусоидальных сигналов. Наименьшая (или собственная) частота этих сигналов — 1/Т Гц; остальные частоты кратны данной (2/Т0, 3/Т0, ...) и называются гармониками. Важной особенностью линейной системы является принцип суперпозиции — реакция на сумму сигналов равна сумме откликов на каждый сигнал. Фактически это свойство используется как определение линейности. Математически система линейна, если для всех a, b, x1(t) и х2(t)
y1(t) — реакция системы на x1(t);
y2(t) — реакция системы на x2(t);
ay1(t) + by2(t) — реакция системы на ax1(t) + bx2(t).
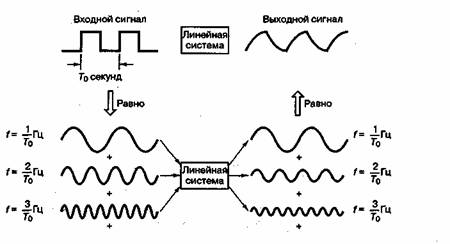
Рис. А. 1. Предсказание реакции системы
Данное определение свидетельствует о том, что выходной отклик линейной системы с входными синусоидальными сигналами должен составляться из синусоидальных сигналов с теми же частотами, что и у входных сигналов; обычно подобная система задается частотной передаточной функцией (частотной характеристикой), описывающей изменение амплитуды и фазы сигнала в зависимости от частоты, как показано на рис. А.2. На рис. А.2, а представлена характерная зависимость амплитуды сигнала от частоты; подобным образом на рис. А.2, б показана зависимость фазы сигнала от частоты.
Передаточная функция является рабочей характеристикой системы, т.е. описывает отклик системы на каждую синусоиду. Следовательно, имея передаточную функцию системы, можно предсказать каждый выходной компонент. С помощью принципа суперпозиции эти выходные компоненты суммируются, что дает реакцию системы на любой входной сигнал (рис. А.1). Подобным образом, зная входной и выходной сигналы, можно определить передаточную функцию системы.
Развитие методов Фурье-анализа оказало большое влияние на анализ линейных систем; оно позволило связать переходные процессы и методы работы с гармоническими функциями, а также упростило анализ линейных систем при их активизации произвольным входным сигналом. Как логарифм позволяет превратить операцию умножения в операцию сложения, так и методы Фурье-анализа позволяют заменить сложные сигналы гармоническими составляющими и методами работы с гармоническими функциями.
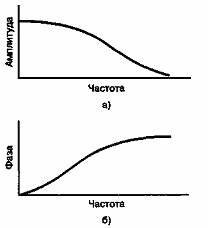
Рис. А.2. Передаточная функция системы:
а) амплитудная характеристика;
б) фазовая характеристика
А.2.1. Разложение в ряд Фурье
Периодические сигналы с конечной энергией, передаваемой за период, можно представить в виде ряда Фурье. Произвольный периодический сигнал x(![]() ) выражается через бесконечное число гармоник с возрастающими частотами.
) выражается через бесконечное число гармоник с возрастающими частотами.
 (А.1)
(А.1)
Члены cos![]() и sin
и sin![]() , называются основными; члены cos n
, называются основными; члены cos n![]() и sin n
и sin n![]() при n > 1, где п — целое, именуются гармоническими. Члены апи bn представляют коэффициенты гармоник, а
при n > 1, где п — целое, именуются гармоническими. Члены апи bn представляют коэффициенты гармоник, а ![]()
![]() — это постоянный член или составляющая постоянного тока.
— это постоянный член или составляющая постоянного тока.
Период функции х(![]() ) должен равняться 2
) должен равняться 2![]() или кратной величине; кроме того, функция х(
или кратной величине; кроме того, функция х(![]() ) должна быть однозначной. Ряд Фурье можно рассматривать как «рецепт приготовления» любого периодического сигнала из синусоидальных составляющих. Чтобы данный ряд имел практическое значение, он должен сходиться, т.е. частичные суммы ряда должны иметь предел.
) должна быть однозначной. Ряд Фурье можно рассматривать как «рецепт приготовления» любого периодического сигнала из синусоидальных составляющих. Чтобы данный ряд имел практическое значение, он должен сходиться, т.е. частичные суммы ряда должны иметь предел.
Процесс создания произвольного периодического сигнала из коэффициентов, описывающих смешивание гармоник, называется синтезом. Обратный процесс вычисления коэффициентов именуется анализом. Вычисление коэффициентов облегчается тем, что среднее от перекрестных произведений синусоиды на косинусоиду (а также средние любой синусоиды или косинусоиды) равно нулю. Ниже приводятся формулы, иллюстрирующие основные свойства средних от гармонических функций.
 (А.2)
(А.2)
 (А.3)
(А.3)
 (А.4)
(А.4)
Рассмотрим, как вычисляются значения коэффициентов аn или bn в формуле (А.1). Например, для вычисления коэффициента а3 обе стороны формулы (А. 1) можно умножить на cos 3![]() d
d![]() , а затем проинтегрировать.
, а затем проинтегрировать.
![]()
![]()
Полученный вывод можно обобщить.
![]() (A.5)
(A.5)
![]() (А.6)
(А.6)
Коэффициент а0 находится из (А.5) при n = 0. В результате получаем следующее.
![]() (A.7)
(A.7)
Данное выражение — это член нулевой частоты, или среднее значение периодического сигнала. Процесс синтеза уравнения (А.1) можно записать в более компактной форме.
![]() (A.8)
(A.8)
Существует несколько способов выражения пары преобразований (анализа и синтеза) Фурье. Наиболее распространенная форма - это выражение синуса и косинуса через экспоненты с комплексным показателем.
![]() (А.9)
(А.9)
 (А.10)
(А.10)
Периодическая функциях c периодом Т0секунд имеет следующие частотные компоненты — ![]() ,
, ![]() ,
, ![]() , ..., где f0 = 1/Т0называется собственной частотой. Иногда частотные компоненты записывают как
, ..., где f0 = 1/Т0называется собственной частотой. Иногда частотные компоненты записывают как ![]() , 2
, 2![]() , 3
, 3![]() , …, где
, …, где ![]() именуется собственной угловой частотой; частота f измеряется в герцах, частота w — в радианах в секунду. Заменим п
именуется собственной угловой частотой; частота f измеряется в герцах, частота w — в радианах в секунду. Заменим п![]() в аргументах гармонических функций в формулах (А.5)-(А.8) на
в аргументах гармонических функций в формулах (А.5)-(А.8) на ![]() , где n- целое. При n = 1, пf0 представляет собственную частоту, а при п>1 - гармоники собственной частоты. Используя формулы (А.8)-(А.10), можно записать x(t) в экспоненциальной форме.
, где n- целое. При n = 1, пf0 представляет собственную частоту, а при п>1 - гармоники собственной частоты. Используя формулы (А.8)-(А.10), можно записать x(t) в экспоненциальной форме.
![]() (A.11)
(A.11)
Обозначим через спкомплексные коэффициенты, или спектральные компоненты x(t), связанные с коэффициентами апи bn следующим образом.
 (A.12)
(A.12)
Теперь формулу (А. 11) можно упростить.
![]() (A.13)
(A.13)
Здесь коэффициенты экспоненциальных гармоник определяются следующим образом.
 (A. 14)
(A. 14)
Для проверки справедливости формулы (А. 14) умножим обе части выражения (А. 13) на![]() , проинтегрируем по промежутку (
, проинтегрируем по промежутку (![]() ) и используем следующую формулу.
) и используем следующую формулу.
 (А.15)
(А.15)
Здесь ![]() называется дельта-функцией Кронекера. После выполнения указанных действий получаем
называется дельта-функцией Кронекера. После выполнения указанных действий получаем
 (A.16)
(A.16)
для всех целых т. В общем случае коэффициент сn - комплексное число, выразить которое можно следующим образом.
![]() (А.17)
(А.17)
![]() ,
,![]() (А.18)
(А.18)
где
![]() (А.19)
(А.19)
 (А.20)
(А.20)
Значение |сn| определяет амплитуду n-й гармоники периодического сигнала, так что график зависимости |сn| от частоты, называемой амплитудным спектром, дает амплитуду каждой из n дискретных гармоник сигнала. Подобным образом график зависимости ![]() от частоты, именуемой фазовым спектром, дает фазу каждой гармоники сигнала. Коэффициенты Фурье вещественной периодической по времени функции обладают следующим свойством.
от частоты, именуемой фазовым спектром, дает фазу каждой гармоники сигнала. Коэффициенты Фурье вещественной периодической по времени функции обладают следующим свойством.
![]() (А.21)
(А.21)
где ![]() — комплексно сопряженное сn. Таким образом, получаем следующее.
— комплексно сопряженное сn. Таким образом, получаем следующее.
![]() (А.22)
(А.22)
Амплитудный спектр является четной функцией частоты. Подобным образом фазовый спектр ![]() — это нечетная функция частоты, поскольку из формулы (А.20) следует, что
— это нечетная функция частоты, поскольку из формулы (А.20) следует, что
![]() . (А.23)
. (А.23)
Итак, как отмечалось выше, ряды Фурье особенно полезны при описании произвольных периодических сигналов с конечной энергией каждого периода. Кроме того, они могут использоваться для описания непериодических сигналов, имеющих конечную энергию за конечный интервал. Впрочем, для таких сигналов более удобным является представление в виде интеграла Фурье (см. раздел А.2.3).
А.2.2. Спектр последовательности импульсов
В цифровой связи весьма важным сигналом является идеальная периодическая последовательность прямоугольных импульсов, показанная на рис. А.З. Для коэффициентов ряда Фурье последовательности импульсов xp(t) с периодом T0 (каждый импульс имеет амплитуду А и длительность T) справедливо следующее выражение (проверить справедливость можно с помощью формул (А. 14) и (А.10)).
 (A.24)
(A.24)
Рис. А.З. Последовательность импульсов
В данном выражении
Функция sinc, как показано на рис. А.4, достигает максимума (единицы) при у=0 и стремится к нулю при у![]() , осциллируя с постепенно уменьшающейся амплитудой. Через нуль она проходит в точках у = ±1, ±2, .... На рис. А.5, а как функция отношения п/Т0показан амплитудный спектр последовательности импульсов |сп|, а на рис. А.5, б изображен фазовый спектр
, осциллируя с постепенно уменьшающейся амплитудой. Через нуль она проходит в точках у = ±1, ±2, .... На рис. А.5, а как функция отношения п/Т0показан амплитудный спектр последовательности импульсов |сп|, а на рис. А.5, б изображен фазовый спектр ![]() . Следует отметить, что положительные и отрицательные частоты двустороннего спектры - это весьма полезный способ математического выражения спектра; очевидно, что в лабораторных условиях воспроизвести можно только положительные частоты.
. Следует отметить, что положительные и отрицательные частоты двустороннего спектры - это весьма полезный способ математического выражения спектра; очевидно, что в лабораторных условиях воспроизвести можно только положительные частоты.
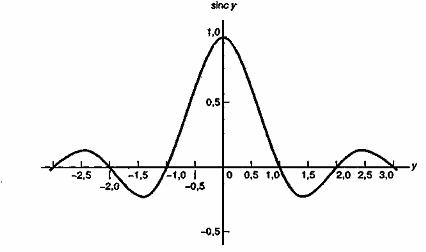
Рис. А.4. Функция sinc
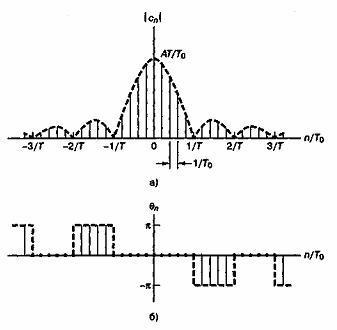
Рис. А.5. Спектр последовательности импульсов:
а) амплитудный; б) фазовый
Синтез выполняется посредством подстановки коэффициентов из формулы (А.24) в формулу (А.13). Получаемый ряд представляет исходную последовательность импульсов xр(t), синтезированную из составных элементов.
 (A.25)
(A.25)
Идеальная периодическая последовательность импульсов включает все гармоники, кратные собственной частоте. В системах связи часто предполагается, что значительная часть мощности или энергии узкополосного сигнала приходится на частоты от нуля до первого нуля амплитудного спектра (рис. А.5, а). Таким образом, в качестве меры ширины полосы последовательности импульсов часто используется величина 1/Т (где Т — длительность импульса). Отметим, что ширина полосы обратно пропорциональна длительности импульса; чем меньше импульсы, тем более широкая полоса с ними связана. Отметим также, что расстояние между спектральными линиями ![]() обратно пропорционально периоду импульсов; при увеличении периода линии располагаются ближе друг к другу.
обратно пропорционально периоду импульсов; при увеличении периода линии располагаются ближе друг к другу.
А.2.3. Представление в виде интеграла Фурье
В системах связи часто встречаются непериодические сигналы, имеющие конечную энергию в конечном интервале и нулевую энергию за пределами этого интервала. Подобные сигналы удобно описывать, используя представление в виде интеграла Фурье, или просто Фурье-образ. Непериодический сигнал можно описать как периодический в предельном смысле. Рассмотрим, например, последовательность импульсов, показанную на рис. А.З. Если Т0стремится к бесконечности, последовательность импульсов превращается в отдельный импульс x(t), число спектральных линий стремится к бесконечности, а график спектра превращается в гладкий спектр частот Х(f). Для данного предельного случая можно определить пару интегральных преобразований Фурье.
![]() (A.26)
(A.26)
и
![]() , (A.27)
, (A.27)
где f - частота, измеряемая в герцах. Данную пару преобразований можно использовать при описании частотно-временных соотношений непериодических сигналов.
С этого момента применение преобразования Фурье будем обозначать ![]()
![]() , а обратное преобразование —
, а обратное преобразование — ![]() . Связь частотной и временной областей будем указывать с использованием знака
. Связь частотной и временной областей будем указывать с использованием знака ![]() .
.
![]()
Данная запись означает, что X(f) получается в результате применения преобразования Фурье к x(t), а х(t) - в результате применения обратного преобразования Фурье к X(f). В контексте систем связи x(t) — вещественная функция, a X(f) — комплексная функция, имеющая действительный и мнимый компоненты; в полярной форме спектр X(f) можно задать через его амплитудную и фазовую характеристики.
![]() (А.28)
(А.28)
Свойства X(f), спектра непериодического сигнала, подобны свойствам периодического сигнала, представленным в формулах (А.17)-(А.23); т.е. если x(t) принимает вещественные значения,
![]() (А.29)
(А.29)
![]() , (А.30)
, (А.30)
где X* — комплексно сопряженное X. Амплитудный спектр |X(f)| — это четная функция f, а фазовый спектр — нечетная функция f. Во многих случаях функция X(f) имеет или только действительную часть, или только мнимую, так что для ее описания достаточно одного графика.
А.3. Свойства преобразования Фурье
Существует множество хороших справочников, в которых подробно рассмотрены преобразования Фурье и их свойства [1-4]. В данном приложении внимание акцентируется на свойствах, представляющих интерес в теории связи. Некоторыми ключевыми особенностями передач в системах связи являются временная задержка, сдвиг фазы, перемножение с другими сигналами, трансляция частоты, свертка сигнала и свертка спектра. Остановимся подробнее на свойствах преобразования Фурье (сдвиг и свертка), необходимых для описания данных особенностей.
А.3.1. Сдвиг во времени
Если ![]() , то
, то
![]() (A.31)
(A.31)
Пусть ![]() , тогда
, тогда
![]()
Если сигнал запаздывает во времени, амплитуда его частотного спектра не меняется, а фазовый спектр сдвигается по фазе. Сдвиг на время t0 во временной области эквивалентен умножению на ![]() (сдвигу фазы на
(сдвигу фазы на ![]() ) во временной области.
) во временной области.
А.3.2. Сдвиг по частоте
Если ![]() , то
, то
![]() (A.32)
(A.32)
Выше приведено свойство трансляции частоты, которое описывает смещенный спектр, возникающий при умножении сигнала на ![]() . Используя формулу (А.32) вместе с формулой (А.9), можно получить выражения для Фурье-образа сигнала, умноженного на косинусоиду.
. Используя формулу (А.32) вместе с формулой (А.9), можно получить выражения для Фурье-образа сигнала, умноженного на косинусоиду.
![]()
![]() (А.33)
(А.33)
Данное свойство также называется теоремой о модуляции (или смешивании). Умножение произвольного сигнала на синусоиду частоты f0 приводит к трансляции исходного спектра сигнала на f0 и -f0.
А.4. Полезные функции
А.4.1. Дельта-функция
Полезной функцией в теории связи является так называемая дельта-функция Дирака, или единичный импульс, ![]() . Импульсную функцию можно определить из любой фундаментальной функции (например, прямоугольного или треугольного импульса). В любом случае импульсная функция определяется в пределе (амплитуда импульса стремится к бесконечности, длительность импульса — к нулю, а площадь импульса равна единице) [5]. Единичная импульсная функция имеет следующие свойства.
. Импульсную функцию можно определить из любой фундаментальной функции (например, прямоугольного или треугольного импульса). В любом случае импульсная функция определяется в пределе (амплитуда импульса стремится к бесконечности, длительность импульса — к нулю, а площадь импульса равна единице) [5]. Единичная импульсная функция имеет следующие свойства.
![]() (А.34)
(А.34)
![]() (А.35)
(А.35)
![]() не ограничена в точке t = 0 (А.36)
не ограничена в точке t = 0 (А.36)
![]() (А.37)
(А.37)
![]() (A.38)
(A.38)
Формула (А.38) представляет просеивающее (или выборочное) свойство; результат интегрирования функции x(t) с дельта-функцией — выборка функции x(t) в точке t = t0.
В некоторых задачах полезными бывают следующие представления дельта-функции в частотной и временной областях.
![]() (А.39)
(А.39)
![]()
![]() (A.40)
(A.40)
A.4.2. Спектр синусоиды
Для нахождения Фурье-образа синусоидального сигнала Необходимо предположить, что данный сигнал существует только в интервале (![]() ). При таком условии функция будет иметь Фурье-образ, пока Т0будет конечно. В пределе Т0предполагается очень большим, но конечным. Спектр сигнала x(t) =
). При таком условии функция будет иметь Фурье-образ, пока Т0будет конечно. В пределе Т0предполагается очень большим, но конечным. Спектр сигнала x(t) =![]() можно найти, используя формулы (А.9) и (А.26).
можно найти, используя формулы (А.9) и (А.26).
![]()
Как видно из формулы (А.40), данное интегральное выражение можно записать через следующие единичные импульсные функции.
![]() (А.41)
(А.41)
Подобным образом можно показать, что спектр синусоидального сигнала ![]() равен следующему.
равен следующему.
![]() (А.42)
(А.42)
Спектр косинусоидального сигнала показан на рис. А.6, а спектр синусоидального сигнала — на рис. А.7. Все дельта-функции на этих рисунках изображены как пики с весовыми коэффициентами А/2 или -А/2.
Рис. А.6. Спектр сигнала x(t) =![]()
А.5. Свертка
В конце XIX века Оливер Хевисайд (Oliver Heaviside) использовал свертку для вычисления тока на выходе электрической схемы, на вход которой подан сигнал, описываемый сложной функцией напряжения. Использование методов Хевисайда предшествовало применению аналитических методов, разработанных Фурье и Лапласом (хотя публикации Фурье и Лапласа вышли раньше).
Рис. A.7. Спектр сигнала ![]()
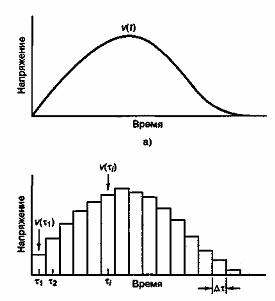
Отклик схемы на входное импульсное возмущение ![]() называется импульсной характеристикой и обозначается h(t), как показано на рис. А.8, т.е. это просто выходное напряжение, полученное при подаче на вход дельта-функции. Хевисайд аппроксимировал произвольный сигнал, подобный показанному на рис. А.9, а, набором равноотстоящих импульсов. Подобные импульсы конечной высоты и ненулевой длительности показаны на рис. А.9, б. В пределе при длительности импульса
называется импульсной характеристикой и обозначается h(t), как показано на рис. А.8, т.е. это просто выходное напряжение, полученное при подаче на вход дельта-функции. Хевисайд аппроксимировал произвольный сигнал, подобный показанному на рис. А.9, а, набором равноотстоящих импульсов. Подобные импульсы конечной высоты и ненулевой длительности показаны на рис. А.9, б. В пределе при длительности импульса ![]() каждый импульс стремится к дельта-функции с весовым коэффициентом, равным площади импульса. Далее будем считать, что данные равноотстоящие импульсы имеют нулевую длительность, хотя строго они являются такими только в пределе.
каждый импульс стремится к дельта-функции с весовым коэффициентом, равным площади импульса. Далее будем считать, что данные равноотстоящие импульсы имеют нулевую длительность, хотя строго они являются такими только в пределе.
Рис. А.8. Импульсная характеристика линейной системы
Поскольку нас интересует как время подачи импульсов на вход, так и время наблюдения реакции на них на выходе, следует весьма аккуратно относиться к записи времени. Поэтому определим две различные временные последовательности; начнем с использования следующей формы записи.
1. Время на входе будем обозначать через ![]() , так что входные импульсы напряжения будут записываться как
, так что входные импульсы напряжения будут записываться как ![]() ,
, ![]() , …,
, …, ![]() .
.
2. Время на выходе будем обозначать через t, так что выходные функции тока будут записываться как i(t1), i(t2), …, i(tN).
Хевисайд нашел отклик схемы (или ток на выходе) для каждого входного импульса; после этого он сложил эти токи и получил общий ток на выходе. Весовой коэффициент прямоугольного импульса, поданного в момент ![]() — это произведение
— это произведение ![]() . Если устремить
. Если устремить ![]() к нулю, последовательность импульсов будет аппроксимировать произвольное входное напряжение настолько точно, насколько это нужно. Снова отметим, что момент подачи импульса на вход — это
к нулю, последовательность импульсов будет аппроксимировать произвольное входное напряжение настолько точно, насколько это нужно. Снова отметим, что момент подачи импульса на вход — это ![]() , а момент определения реакции системы - ti, где
, а момент определения реакции системы - ti, где ![]() - переменная входного времени, a t - переменная выходного времени, i = 1, ..., N.
- переменная входного времени, a t - переменная выходного времени, i = 1, ..., N.
б)
Рис. А.9. Аппроксимация произвольного входного сигнала:
а) входной сигнал; б) аппроксимация входного сигнала
На рис. А.10 показана выходная реакция i(t) = A1h(t-![]() ) на импульс с весовым коэффициентом
) на импульс с весовым коэффициентом ![]() . Поскольку входной импульс в момент
. Поскольку входной импульс в момент ![]() не является единичным, он умножается на весовой коэффициент — интенсивность (или площадь)
не является единичным, он умножается на весовой коэффициент — интенсивность (или площадь) ![]() . В некоторый момент времени t1 где
. В некоторый момент времени t1 где ![]() , выходная реакция на импульс
, выходная реакция на импульс ![]() , как показано на рис. А.10, выражается следующим образом.
, как показано на рис. А.10, выражается следующим образом.
![]() при
при ![]()
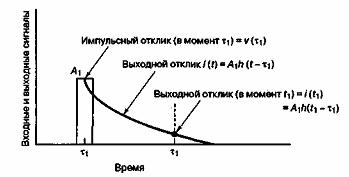
Рис. А. 10. Реакция на импульс в момент ![]()
При наличии нескольких входных импульсов общий выходной отклик линейной системы — это просто сумма отдельных откликов. На рис. А.11 показан отклик сети на два единичных импульса. При N импульсах на входе ток на выходе, измеренный в момент времени t1, можно записать следующим образом.
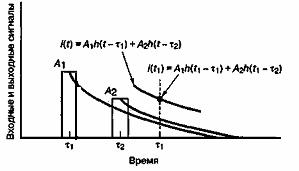
Рис. А. 11. Реакция на два импульса
i(t1) = ![]() +
+![]() + …+
+ …+![]() ,
,
где импульсы подаются в моменты ![]() ,
, ![]() , …,
, …, ![]() и где
и где ![]() .
.
Все импульсы, поданные на вход после момента t1, не учитываются, поскольку они не дают вклада в i(t1). Это согласуется с требованием причинности физически реализуемых систем — отклик системы должен быть нулевым до применения возмущения. Итак, можно записать ток на выходе в любой момент времени t следующим образом.
i(t) = ![]() +
+![]() + …+
+ …+![]()
или, поскольку весовой коэффициент импульса в момент времени ![]() равен
равен ![]() ,
,
![]() (A.43)
(A.43)
Когда ![]() стремится к нулю, сумма входных импульсов — к действительному напряжению
стремится к нулю, сумма входных импульсов — к действительному напряжению ![]() ,
, ![]() можно заменить
можно заменить ![]() , при этом сумма переходит в интеграл свертки.
, при этом сумма переходит в интеграл свертки.
![]() (А.44,а)
(А.44,а)
или
![]() (A.44,б)
(A.44,б)
В сокращенной записи
![]() (A.45)
(A.45)
Итак, i(t) - это сумма реакций на отдельные импульсные возмущения, произведенные в некоторый входной момент ![]() , причем каждый импульс умножается на весовой коэффициент — интенсивность.
, причем каждый импульс умножается на весовой коэффициент — интенсивность.
А.5.1. Графическая иллюстрация свертки
Рассмотрим квадратный импульс v(t), подаваемый на вход линейной сети, импульсная характеристика которой равна h(t) (рис. А. 12, а). Отклик на выходе описывается интегралом свертки, представленным в формуле (А.44).
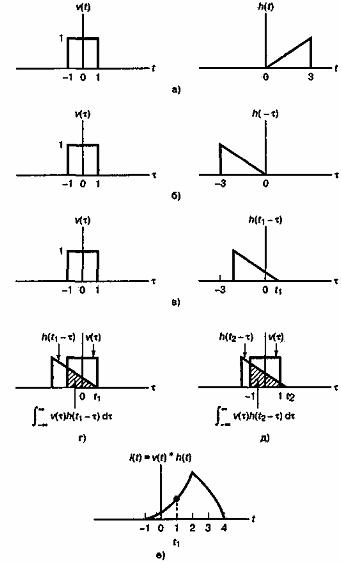
Рис. А. 12. Графическая иллюстрация свертки
Независимой переменной в интеграле свертки является ![]() . На рис. А. 12, б показаны функции
. На рис. А. 12, б показаны функции ![]() и
и ![]() . Отметим, что
. Отметим, что ![]() получается отображением
получается отображением ![]() относительно оси
относительно оси ![]() . Член
. Член ![]() представляет функцию
представляет функцию ![]() , смещенную на t секунд вдоль положительного направления оси
, смещенную на t секунд вдоль положительного направления оси ![]() . На рис. А. 12, в показана функция
. На рис. А. 12, в показана функция ![]() . Значение интеграла свертки в момент времени t=t1 получается из формулы (А.44), в которой положено t = tl. Это просто площадь под кривой произведения
. Значение интеграла свертки в момент времени t=t1 получается из формулы (А.44), в которой положено t = tl. Это просто площадь под кривой произведения ![]() на
на ![]() , показанного на рис. А. 12, г. Подобным образом интеграл свертки, взятый в момент t = t2, равен заштрихованной области на рис. А. 12, д. На рис. А. 12, е приведен график отклика на выходе схемы при квадратном импульсе на входе, показанном на рис. А. 12, а. Каждое вычисление интеграла свертки для некоторого момента времени t1 дает одну точку i(ti) графика на рис. А.12, е.
, показанного на рис. А. 12, г. Подобным образом интеграл свертки, взятый в момент t = t2, равен заштрихованной области на рис. А. 12, д. На рис. А. 12, е приведен график отклика на выходе схемы при квадратном импульсе на входе, показанном на рис. А. 12, а. Каждое вычисление интеграла свертки для некоторого момента времени t1 дает одну точку i(ti) графика на рис. А.12, е.
А.5.2. Свертка по времени
Если ![]() и
и ![]() , то
, то
![]()
![]()
Для линейных систем порядок интегрирования можно изменить.
![]() (A.46)
(A.46)
С помощью свойства сдвига во времени второе интегральное выражение правой части можно заменить на ![]() .
.
![]() (A.47)
(A.47)
Следовательно, операцию свертки во временной области можно заменить умножением в частотной области.
А.5.3. Свертка по частоте
Можно показать, что, вследствие симметрии пары преобразований Фурье (формулы (А.26) и (А.27)), умножение во временной области переходит в свертку в частотной области.
![]() (A.48)
(A.48)
Данный переход умножения в одной области в свертку в другой весьма удобен, поскольку, как правило, одну из этих операций выполнить значительно проще, чем другую. Например, ранее говорилось, что Хевисайд использовал свертку для нахождения тока на выходе линейной системы при подаче на вход произвольного переменного напряжения. Подобные методы часто включают вычисление (иногда трудоемкое) свертки входного сигнала с импульсной характеристикой системы. Поскольку, как видно из формулы (А.47), свертка во временной области переходит в умножение в частотной, для линейной системы входной сигнал можно просто умножить на передаточную функцию системы. Выходной сигнал затем получается путем применения к произведению обратного преобразования Фурье.
![]() (А.49)
(А.49)
Вычислить выражение (А.49) часто намного проще, чем (А.45). В то же время, при определенных обстоятельствах, операция свертки настолько проста, что ее можно выполнить графически, просто внимательно изучив соответствующий график. Предположим, что некоторый произвольный сигнал необходимо умножить на косинусоиду фиксированной частоты, например несущую (если речь идет о модуляции). С помощью формулы (А.48) спектр произвольного сигнала можно свернуть со спектром косинусоиды, что, как показывается в следующем разделе, выполняется довольно просто.
А.5.4. Свертка функций с единичным импульсом
При использовании свойства, представленного в формуле (А.47), очевидно, что если
![]()
и
![]() ,
,
то
![]() . (А.50)
. (А.50)
Также должно быть очевидно, что
![]() (A.51)
(A.51)
и
![]() (A.52)
(A.52)
Следовательно, можно сделать вывод, что свертка функции с единичным импульсом дает исходную функцию. Простое развитие формулы (А.52) дает следующее.
![]() (A.53)
(A.53)
На рис. А. 13 показано, насколько просто производится свертка спектра произвольного сигнала со спектром косинусоиды. На рис. А. 13, а представлен спектр X(f) произвольного узкополосного сигнала. На рис. А.13, б показан спектр ![]() . Выход Z(f) = Х(f)*Y(f) на рис. А.13, в получается при свертке спектра сигнала с импульсной функцией Y(f), согласно формуле (А.53), где импульсы действуют как стробирующие функции. Следовательно, в данном простом примере свертку можно выполнить графически, заметая стробирующие импульсы через спектр сигнала. Умножение на импульсные функции на каждом шаге заметания приводит к повторению спектра сигнала. Результат, показанный на рис. А.13, в, — это версия исходного спектра X(f), смещенная к месторасположению импульсных функций, изображенных на рис. А.13, б.
. Выход Z(f) = Х(f)*Y(f) на рис. А.13, в получается при свертке спектра сигнала с импульсной функцией Y(f), согласно формуле (А.53), где импульсы действуют как стробирующие функции. Следовательно, в данном простом примере свертку можно выполнить графически, заметая стробирующие импульсы через спектр сигнала. Умножение на импульсные функции на каждом шаге заметания приводит к повторению спектра сигнала. Результат, показанный на рис. А.13, в, — это версия исходного спектра X(f), смещенная к месторасположению импульсных функций, изображенных на рис. А.13, б.
А.5.5. Применение свертки при демодуляции
В разделе А.5.4 рассматривался сигнал, умноженный на ![]() . Было показано, как в частотной области выглядит свертка спектра сигнала со спектром косинусоиды. В данном разделе рассматривается обратный процесс. Необходимо демодулировать сигнал, умноженный на
. Было показано, как в частотной области выглядит свертка спектра сигнала со спектром косинусоиды. В данном разделе рассматривается обратный процесс. Необходимо демодулировать сигнал, умноженный на ![]() (сигнал нужно восстановить в его изначальном диапазоне частот).
(сигнал нужно восстановить в его изначальном диапазоне частот).
Рис. А.13. Свертка спектра сигнала со спектром косинусоиды
На рис. А. 14, а представлен спектр, Z(f), сигнала, смещенного вверх по частоте.
Можно демодулировать данный смещенный сигнал и восстановить исходный сигнал, умножив данный сигнал на ![]() . Вместо этого мы можем проиллюстрировать процесс обнаружения в частотной области, свернув Z(f) со спектром несущей,
. Вместо этого мы можем проиллюстрировать процесс обнаружения в частотной области, свернув Z(f) со спектром несущей, ![]() , показанным на рис. А. 14, б.
, показанным на рис. А. 14, б.
Рис. А.14. Применение демодуляции
Использование формул (А.52) и (А.53) позволяет записать следующее.
![]() (A.54)
(A.54)
Следовательно, результат демодуляции X(f)=Z(f)*Y(f) получаем в результате применения формулы (А. 54). Получающийся спектр сигнала — это спектр исходного сигнала плюс компоненты, центрированные на частотах ±2f0, как показано на рис. А. 14, в. Как и в предыдущем разделе, свертку можно выполнить графически. На рис. А. 14, в отображены следующие члены.
![]() =
=
= ![]()
+![]() =
=
= ![]() (А.55)
(А.55)
Отметим, что результат — это спектр исходного сигнала плюс члены, связанные с высокочастотными компонентами. Данный результат типичен для процесса обнаружения; высокочастотные члены отфильтровываются и отбрасываются, оставляя спектр демодулированного исходного сигнала.
А.6. Таблицы Фурье-образов и свойств преобразования Фурье
В табл. А.1 и А.2 приведены Фурье-образы наиболее часто встречающихся функций и некоторые свойства преобразования Фурье.
Таблица А. 1. Фурье-образы
|
|
|
|
1. |
1 |
|
2. 1 |
|
|
3. |
|
|
4. |
|
|
5. |
|
|
6. |
|
|
7. |
|
|
8. |
|
|
9. |
|
|
10. |
|
|
11. |
|
|
12. |
|
|
13. |
|
|
14. |
|
|
15. |
|
|
16. |
|





Примечание: rect(f/2W) = 1 для -W<f< W и 0 для | f | > W; sinc x = (sin![]() )/
)/![]() .
.
Таблица A. 2. Свойства преобразования Фурье
|
Действие |
|
|
|
1. Изменение масштаба |
x(at) |
|
|
2. Сдвиг во времени |
|
|
|
3. Сдвиг по частоте |
|
|
|
4. Дифференцирование по времени |
|
|
|
5. Дифференцирование по частоте |
|
|
|
6. Интегрирование по времени |
|
|
|
7. Свертка по времени |
|
|
|
8. Свертка по частоте |
|
|

Литература
1. Papoulis A. Signal Analysis. McGraw-Hill Book Company, New York, 1977.
2. Panter P. F. Modulation, Noise, and Spectral Analysis. McGraw-Hill Book Company, New York, 1965.
3. Bracewell R. The Fourier Transfer and Its Applications. McGraw-Hill Book Company, New York, 1978.
4. Haykin S. Communications Systems. John Wiley & Sons, Inc., New York, 1983.
5. Schwartz M. Information, Transmission, Modulation, and Noise. McGraw-Hill Book Company, New York, 1980.
Приложение Б. Основы теории принятия статистических решений
Б.1. Теорема Байеса
Математические основы проверки гипотез базируются на теореме Байеса, которая следует из определения отношения между условной вероятностью и совместной вероятностью случайных переменных A и В.
Р(А|В)Р(В) = Р(В|А)Р(А) = Р(А,В) (Б.1)
Теорема формулируется следующим образом.
Р(А|В)=
![]() (Б.2)
(Б.2)
Теорема Байеса позволяет выводить условную вероятность Р(А|В) из условной вероятности Р(В|А).
Б. 1.1. Дискретная форма теоремы Байеса
Теорему Байеса можно записать в дискретной форме следующим образом.
 i = 1, …, M; j = 1, … (Б.З) где
i = 1, …, M; j = 1, … (Б.З) где
![]()
В приложениях связи si - это i-й класс сигнала из набора М классов, a zj - j-я выборка принятого сигнала. Уравнение (Б.З) можно рассматривать как описание эксперимента, в котором задействована принятая выборка и некоторые статистические знания о классах сигнала, к которым может принадлежать эта принятая выборка. До эксперимента вероятность появления i-гo класса сигнала P(si) называется априорной. В результате изучения конкретной принятой выборки zj из плотности условной вероятности P(zj|si) можно найти статистическую меру правдоподобия принадлежности zj к классу si. После эксперимента можно вычислить апостериорную вероятность P(si|zj), которую можно рассматривать как "уточнение" наших априорных знаний. Таким образом, к эксперименту мы приступаем, имея некоторые априорные знания, касающиеся вероятности состояния природы, а после изучения выборочного сигнала получаем апостериорную ("после свершения") вероятность. Параметр P(zj) — это вероятность принятой выборкиzj, во всем пространстве классов сигналов. Этот термин, P(zj), можно рассматривать как масштабный множитель, поскольку его значение одинаково для всех классов сигнала.
Пример Б.1. Использование (дискретной формы) теоремы Байеса
Имеется два ящика деталей. Ящик 1 содержит 1000 деталей, 10% из которых неисправны, а ящик 2 — 2000 деталей, из которых неисправными являются 5%. Если в результате случайного выбора ящика и детали из него деталь оказывается исправной, то чему равна вероятность того, что данная деталь взята из ящика 1?
Решение
P (ящик 1|ИД) = Р(ИД | ящик 1)/Р(ИД),
где ИД означает "исправная деталь".
Р(ИД) = Р(ИД | ящик 1)Р(ящик 1) + Р(ИД | ящик 2)Р(ящик 2) =
= (0,90)(0,5) + (0,95)(0,5) = 0,450 + 0,475 = 0,925
Р(ящик 1| ИД) =![]() = 0,486
= 0,486
До эксперимента априорные вероятности выбора ящика 1 или 2 равны. После получения исправной детали вычисления, проведенные согласно теореме Байеса, могут рассматриваться как способ "точной подстройки" нашего представления о том, что Р(ящик 1) = 0,5, в результате которой возникает апостериорная вероятность 0,486. Теорема Байеса — это просто формализация здравого смысла. Если была получена исправная деталь, то не кажется ли вам (интуитивно), что она с большей вероятностью могла быть взята из ящика с более высокой концентрацией исправных деталей и с меньшей - из ящика с меньшей концентрацией? Теорема Байеса уточняет априорную статистику выбора ящиков, порождая апостериорную статистику.
Пример Б.2. Применение теории принятия решений в теории игр
В ящике находится три монеты: обычная, с двумя орлами и с двумя решками. Вам предлагается случайным образом вытянуть одну монету, взглянуть на одну ее сторону и угадать, что находится на другой стороне. Какой стратегии лучше всего придерживаться?
Решение
Данную задачу можно рассматриваться как задачу обнаружения сигнала. Сигнал передается, но вследствие шума канала принятый сигнал не совсем отчетлив. Невозможность взглянуть на обратную сторону монеты равносильна приему сигнала, возмущенного шумом. Пусть Hi представляет гипотезу (i = П, О, Р), где индексы П, О и Р обозначают правильную монету, монету с двумя орлами и монету с двумя решками.
НП = О,Р (правильная монета)
НО = О,О (монета с двумя орлами)
НР= Р, Р (монета с двумя решками)
Пусть zj представляет принятую выборку (j=O,P), где zO - орел, аzO - решка. Пусть априорные вероятности гипотез равновероятны, так что Р(НП) = =Р(НО) = Р(НР) = 1/3. Используем теорему Байеса.
Нам необходимо вычислить вероятности всех гипотез для всех классов сигнала. Следовательно, нам нужно изучить результаты шести вычислений, после чего мы сможем установить оптимальную стратегию принятия решения. В каждом случае значение ![]() можно вычислить из условных вероятностей, изображенных на рис. Б.1. Пусть мы выбрали монету и увидели орел (zO), тогда вычисление трех апостериорных вероятностей дает следующие результаты.
можно вычислить из условных вероятностей, изображенных на рис. Б.1. Пусть мы выбрали монету и увидели орел (zO), тогда вычисление трех апостериорных вероятностей дает следующие результаты.
P(HP / zO) = 0
Если принятой выборкой является решка (zP), вычисления дают следующее.
![]()
![]()
![]()
Рис. Б.1. Условная вероятность ![]() :
:
а) для правильной монеты; б) для монеты с двумя орлами;
в) для монеты с двумя решками
Таким образом, оптимальной стратегией принятия решения является следующая: если принят орел (zO), выбрать гипотезу НO (соответствующую монете с двумя орлами); если принята решка (zP), выбрать гипотезу HP (соответствующую монете с двумя решками).
Б.1.2. Теорема Байеса в смешанной форме
Для большинства приложений связи, представляющих практический интерес, возможные значения принятой выборки принадлежат непрерывному диапазону (причина - наличие в канале связи аддитивного гауссового шума). Следовательно, наиболее полезная форма теоремы Байеса содержит плотность вероятности с непрерывными, а не дискретными значениями. Изменим соответствующим образом формулу (Б.З).
 (Б.4)
(Б.4)
Здесь ![]() - плотность условной вероятности принятой выборки z (принимающей значения из непрерывного диапазона) при условии принадлежности к классу si.
- плотность условной вероятности принятой выборки z (принимающей значения из непрерывного диапазона) при условии принадлежности к классу si.
Пример Б.З. Наглядное представление теоремы Байеса
Даны два класса сигнала s1 и s2, которые описываются треугольными функциями плотности условной вероятности ![]() и
и ![]() , показанными на рис. Б.2. Принят некоторый сигнал; он может иметь любое значение по оси z. Если функции плотности вероятности не перекрываются, сигнал можно классифицировать однозначно. В данном же примере, приведенном на рис. Б.2, нам требуется правило, которое позволит классифицировать принятые сигналы, поскольку некоторые из них попадут в область перекрывающихся функций плотности вероятности. Рассмотрим принятый сигнал za. Пусть два класса сигналов s1 и s2 являются равновероятными. Нужно вычислить две возможные апостериорные вероятности и предложить правило принятия решений, которое следует использовать при определении принадлежности сигнала za к определенному классу. То же самое нужно сделать для сигнала zb.
, показанными на рис. Б.2. Принят некоторый сигнал; он может иметь любое значение по оси z. Если функции плотности вероятности не перекрываются, сигнал можно классифицировать однозначно. В данном же примере, приведенном на рис. Б.2, нам требуется правило, которое позволит классифицировать принятые сигналы, поскольку некоторые из них попадут в область перекрывающихся функций плотности вероятности. Рассмотрим принятый сигнал za. Пусть два класса сигналов s1 и s2 являются равновероятными. Нужно вычислить две возможные апостериорные вероятности и предложить правило принятия решений, которое следует использовать при определении принадлежности сигнала za к определенному классу. То же самое нужно сделать для сигнала zb.
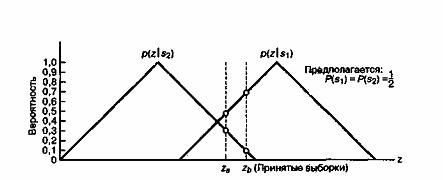
Рис. Б.2. Наглядное представление теоремы Байеса
Решение
Из рис. Б.2 видим, что ![]() = 0,5 и
= 0,5 и ![]() = 0,3. Следовательно,
= 0,3. Следовательно,
 =
=
=![]()
и

Одно из возможных правил - определять принятый сигнал к классу с максимальной апостериорной вероятностью (классу S1). Эквивалентное правило, для равных априорных вероятностей, - это исследовать значение функции плотности вероятности, обусловленной каждым классом сигналов (называемой правдоподобием класса сигналов), и выбрать класс с максимальным значением. Рассмотрим рис. Б.2 и отметим, что правило максимального правдоподобия соответствует нашей интуиции. Правдоподобие принадлежности сигналаza к каждому классу сигналов соответствует обведенной кружком точке на каждой функции плотности вероятности. Правило максимального правдоподобия заключается в выборе класса сигналов, дающего максимальную условную вероятность из всех имеющихся. Повторим вычисления для принятого сигнала zb.


Как и ранее, правило максимального правдоподобия указывает нам выбрать класс сигналов s1. Заметим, что при принятии выборки zb, мы более уверены в точности нашего выбора, по сравнению с принятием, сигнала za. Это объясняется тем, что отношение ![]() к
к ![]() существенно больше отношения
существенно больше отношения ![]() к
к ![]() .
.
Б.2. Теория принятия решений
Б.2.1. Элементы задачи теории принятия решений
После того как мы описали проверку гипотез на основе статистики Байеса, перейдем к рассмотрению элементов задачи теории принятия решений в контексте системы связи, как показано на рис. Б.З. Источник сигнала в передатчике состоит из множества {si(t)}, i = 1, ..., М сигналов (или гипотез). Принимается сигнал r(t) = si(t) + n(t), где n(t) — присутствующий в канале аддитивный белый гауссов шум (additive white Gaussian noise — AWGN). В приемнике сигнал сокращается до единственного числа z (t = T), которое может принимать любое значение. Поскольку шум является гауссовым процессом и приемник предполагается линейным, выход z(t) также есть гауссовым процессом [1], а число z(T) — случайной переменной, принимающей значения из непрерывного диапазона.
z(T) = ai(T) + n0(T) (Б.5)
Выборка z(T) составляется из сигнального компонента аi(Т) и шумового компонента п0(Т). Время Т - это длительность символа. В каждый момент времени kT, где k - целое, приемник использует правило принятия решения для определения принадлежности принятого сигнала к определенному классу сигнала. Для простоты записи выражение (Б.5) иногда используют в виде z = ai + n0, где функциональная зависимость от T не выражается явно.
Рис. Б.3. Элементы задачи теории принятия решений в контексте системы связи
Б.2.2. Проверка методом отношения правдоподобий и критерий максимума апостериорной вероятности
При определении правила принятия решения для двух классов сигналов разумно начать со следующего соотношения.
 (Б.6)
(Б.6)
Выражение (Б.6) — это сокращенная запись следующего утверждения: "выбрать гипотезу H1 если апостериорная вероятность P(s1|z) больше апостериорной вероятности P(s2|z); в противном случае выбрать гипотезу H2".
Апостериорные вероятности в формуле (Б.6) можно заменить эквивалентными выражениями, полученными вследствие использования теоремы Байеса (уравнение (Б.4)), что дает следующее.
 (Б.7)
(Б.7)
Итак, у нас есть правило принятия решения, выраженное через плотности вероятности (правдоподобия). Если переписать выражение (Б.7) и привести его к следующему виду
 (Б.8)
(Б.8)
то отношение в левой части будет называться отношением правдоподобий, а все выражение часто именуют критерием отношения правдоподобий. Выражение (Б.8) — это принятие решений на основе сравнения принятого сигнала с порогом. Поскольку проверка опирается на выбор класса сигналов с максимальной апостериорной вероятностью, критерий принятия решения часто называется критерием максимума апостериорной вероятности (maximum a posteriori — MAP). Другое название — критерий минимума ошибки, поскольку в среднем он дает минимальное количество неверных решений. Стоит отметить, что данный критерий является оптимальным, только если ошибки всех типов наносят одинаковый вред (или имеют равную цену). Если ошибки некоторых типов обходятся дороже других, необходимо применять критерий, который учитывал бы относительные стоимости ошибок [1].
Б.2.3. Критерий максимального правдоподобия
Довольно часто сведения об априорных вероятностях гипотез или классов сигналов отсутствуют. Даже при наличии такой информации ее точность иногда вызывает сомнения. В таких случаях решения обычно принимаются исходя из предположения о возможности наиболее выгодной априорной вероятности; иными словами, значения априорных вероятностей выбираются так, чтобы классы были равновероятными. Если выбран такой подход, то критерий принятия решения является критерием максимального правдоподобия, и выражение (Б.8) записывается в следующем виде.
 (Б.9)
(Б.9)
Отметим, что критерий максимального правдоподобия, приведенный в выражении (Б.9), аналогичен правилу максимального правдоподобия, описанному в примере Б.З.
Б.3. Пример обнаружения сигнала
Б.3.1. Двоичное решение по принципу максимального правдоподобия
В наглядном представлении процесса принятия решения (пример Б.З) фигурировали треугольные функции плотности вероятности. На рис. Б.4 приведены функции плотностей условных вероятностей для двоичных выходных сигналов, искаженных шумом: z(T) = а1+ п0 и z(T) = а2 + n0. Сигналы а1и а2взаимно независимы и равновероятны. Шум n0 предполагается независимой гауссовой случайной переменной с нулевым средним, дисперсией ![]() и плотностью вероятности, описываемой следующей формулой.
и плотностью вероятности, описываемой следующей формулой.
 (Б.10)
(Б.10)
Следовательно, отношение правдоподобий, выраженное в формуле (Б.8), можно записать следующим образом.
= 
= (Б.11)
(Б.11)
=![]()
Здесь a1 — сигнальный компонент на выходе приемника при переданном s1(t), а а2— сигнальный компонент на выходе приемника при переданном s2(t). Неравенство (Б. 11) сохраняется при любом монотонно возрастающем (или убывающем) преобразовании.
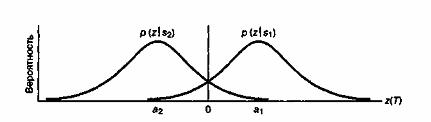
Рис. Б.4. Плотности условных вероятностей для типичного двоичного приемника
Следовательно, для упрощения выражения (БЛ1) от его обеих частей можно взять натуральный логарифм, что даст логарифмическое отношение правдоподобий.
 (Б.12)
(Б.12)
Если классы равновероятны, то

так что
 (Б.13)
(Б.13)
Для антиподных сигналов s1(t) = - s2(t) и a1 = -а2, так что можем записать следующее.
![]() (Б.14)
(Б.14)
Следовательно, правило максимального правдоподобия для равновероятных антиподных сигналов заключается в сравнении принятой выборки с нулевым порогом, что равносильно выбору s1(t), если выборка положительна, и выбору s2(t) — если она отрицательна.
Б.3.2. Вероятность битовой ошибки
Для двоичного примера, приведенного в разделе Б.3.1, рассчитаем вероятность битовой ошибки РВс помощью правила принятия решений из формулы (Б.13). Вероятность ошибки вычисляется путем суммирования вероятностей различных возможностей появления ошибки.
PB = P(H2|sl)P(sl) + P(H1|s2)P(s2) (Б.15)
Другими словами, при переданном сигнале s1(t) ошибка произойдет, если будет выбрана гипотеза H2; или ошибка произойдет, если при переданном сигнале s2(t) будет выбрана гипотеза H1. Для частного случая симметричных функций плотности вероятности и для P(s1) = P(s2) = 0,5 можем записать следующее.
PB = P(H2|sl) = P(H1|s2) (Б.16)
Вероятность ошибки РВравна вероятности принятия неверной гипотезы Н1при переданном сигнале s2(t) или принятия неверной гипотезы Н2при переданном сигнале s1(t). Следовательно, РB численно равна площади под хвостом любой функции плотности вероятности, ![]() или
или ![]() , "заползающим" на неверную сторону порога. Таким образом, РВмы можем вычислить, проинтегрировав
, "заползающим" на неверную сторону порога. Таким образом, РВмы можем вычислить, проинтегрировав ![]() от
от ![]() до
до ![]() или
или ![]() от
от ![]() до
до ![]() .
.
 (Б.17)
(Б.17)
Пусть

Тогда ![]() и
и
 , (Б.18)
, (Б.18)
где Q(x), именуемая гауссовым интегралом ошибок [1], протабулирована в табл. Б.1.
Таблица Б.1. Гауссов интеграл ошибок 
|
Q(x) |
||||||||||
|
x |
0,00 |
0,01 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,07 |
0,08 |
0,09 |
|
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,0 2,1 2,2 2,3 2,4 2,5 2,6 2,7 2,8 2,9 3,0 3,1 3,2 3,3 3,4 |
0,5000 0,4602 0,4207 0,3821 0,3446 0,3085 0,2743 0,2420 0,2169 0,1841 0,1587 0,1357 0,1151 0,0968 0,0808 0,0668 0,0548 0,0446 0,0359 0,0287 0,0228 0,0179 0,0139 0,0107 0,0082 0,0062 0,0047 0,0035 0,0026 0,0019 0,0013 0,0010 0,0007 0,0005 0,0003 |
0,4960 0,4562 0,4168 0,3783 0,3409 0,3050 0,2709 0,2389 0,2090 0,1814 0,1562 0,1355 0,1131 0,0951 0,0793 0,0655 0,0537 0,0436 0,0351 0,0281 0,0222 0,0174 0,0136 0,0104 0,0080 0,0060 0,0045 0,0034 0,0025 0,0018 0,0013 0,0009 0,0007 0,0005 0,0003 |
0,4920 0,4522 0,4129 0,3745 0,3372 0,3015 0,2676 0,2358 0,2061 0,1788 0,1539 0,1314 0,1112 0,0934 0,0778 0,0643 0,0526 0,0427 0,0344 0,0274 0,0217 0,0170 0,0132 0,0102 0,0078 0,0059 0,0044 0,0033 0,0024 0,0018 0,0013 0,0009 0,0006 0,0005 0,0003 |
0,4880 0,4483 0,4090 0,3707 0,3336 0,2981 0,2643 0,2327 0,2033 0,1762 0,1515 0,1292 0,1093 0,0918 0,0764 0,0630 0,0516 0,0418 0,0336 0,0268 0,0212 0,0166 0,0129 0,0099 0,0075 0,0057 0,0043 0,0032 0,0023 0,0017 0,0012 0,0008 0,0006 0,0004 0,0003 |
0,4840 0,4443 0,4052 0,3669 0,3300 0,2946 0,2611 0,2296 0,2005 0,1736 0,1492 0,1271 0,1075 0,0901 0,0749 0,0618 0,0505 0,0409 0,0329 0,0262 0,0207 0,0162 0,0125 0,0096 0,0073 0,0055 0,0041 0,0031 0,0023 0,0016 0,0012 0,0008 0,0006 0,0004 0,0003 |
0,4801 0,4404 0,4013 0,3632 0,3264 0,2912 0,2578 0,2266 0,1997 0,1711 0,1469 0,1251 0,1056 0,0885 0,0735 0,0606 0,0495 0,0401 0,0322 0,0256 0,0202 0,0158 0,0122 0,0094 0,0071 0,0054 0,0040 0,0030 0,0022 0,0016 0,0011 0,0008 0,0006 0,0004 0,0003 |
0,4761 0,4364 0,3974 0,3594 0,3228 0,2877 0,2546 0,2236 0,1949 0,1685 0,1446 0,1230 0,1038 0,0869 0,0721 0,0594 0,0485 0,0392 0,0314 0,0250 0,0197 0,0154 0,0119 0,0091 0,0069 0,0052 0,0039 0,0029 0,0021 0,0015 0,0011 0,0008 0,0006 0,0004 0,0003 |
0,4721 0,4625 0,3936 0,3557 0,3192 0,2843 0,2514 0,2206 0,1922 0,1660 0,1423 0,1210 0,1020 0,0853 0,0708 0,0582 0,0475 0,0384 0,0307 0,0244 0,0192 0,0150 0,0116 0,0089 0,0068 0,0051 0,0038 0,0028 0,0021 0,0015 0,0011 0,0008 0,0005 0,0004 0,0003 |
0,4681 0,4286 0,3897 0,3520 0,3156 0,2810 0,2483 0,2168 0,1894 0,1635 0,1401 0,1190 0,1003 0,0838 0,0694 0,0571 0,0465 0,0375 0,0301 0,0239 0,0188 0,0146 0,0113 0,0087 0,0066 0,0049 0,0037 0,0027 0,0020 0,0014 0,0010 0,0007 0,0005 0,0004 0,0003 |
0,4641 0,4247 0,3859 0,3483 0,3121 0,2776 0,2451 0,2148 0,1867 0,1611 0,1379 0,1170 0,0985 0,0823 0,0681 0,0599 0,455 0,0367 0,0294 0,0233 0,0183 0,0143 0,0110 0,0084 0,0064 0,0048 0,0036 0,0026 0,0019 0,0014 0,0010 0,0007 0,0005 0,0003 0,0002 |
Еще одной часто используемой формой гауссова интеграла ошибок является следующая.
![]() (Б.19)
(Б.19)
Функции Q(x) и erfc(x) связаны следующим образом.
erfc(x) = 2Q(x![]() ) (Б.20)
) (Б.20)
 (Б.21)
(Б.21)
Литература
1. Van Trees H. L. Detection, Estimation, and Modulation Theory. Part 1, John Wiley & Sons. Inc., New York, 1968.
2. Papoulis A. Probability, Random Variables, and Stochastic Processes. McGraw-Hill Book Company, New York, 1965.
Приложение В. Отклик корреляторов на белый шум
На вход группы из N корреляторов подается белый гауссов процесс шума n(t) с нулевым средним и двусторонней спектральной плотностью мощности N0/2. Выходом каждого коррелятора в момент времени t = Т является гауссова случайная переменная, определяемая следующим образом.
![]() (B.1)
(B.1)
Здесь сигналы {![]() } формируют ортонормированное множество. Поскольку переменная nj является гауссовой, она полностью определяется средним и дисперсией. Среднее nj равно
} формируют ортонормированное множество. Поскольку переменная nj является гауссовой, она полностью определяется средним и дисперсией. Среднее nj равно
![]() , (В.2)
, (В.2)
где ![]() — оператор математического ожидания. Дисперсия nj равна
— оператор математического ожидания. Дисперсия nj равна
![]() (В.З)
(В.З)
= ![]() (В.4)
(В.4)
=![]() (В.5)
(В.5)
Поскольку n(t) - это процесс с нулевым средним,
Е{n(t)} = 0. (В.6)
Отсюда следует
![]() (В.7)
(В.7)
Автокорреляционная функция процесса n(t) равна следующему.
![]() (В.8)
(В.8)
Если шум n(t) предполагать стационарным, то Rn(t,s) зависит только от разности времен t = ![]() - s. Из уравнения (В.5) получаем следующее.
- s. Из уравнения (В.5) получаем следующее.
![]() (B.9)
(B.9)
Для стационарного случайного процесса спектральная плотность мощности Gn(f) и автокорреляционная функция ![]() являются Фурье-образами друг друга. Таким образом, можем записать следующее.
являются Фурье-образами друг друга. Таким образом, можем записать следующее.
![]() (В.10)
(В.10)
Поскольку n(t) — это белый шум, его спектральная плотность мощности Gn(f) равна ![]() для всех f, и предыдущее выражение можно переписать следующим образом.
для всех f, и предыдущее выражение можно переписать следующим образом.
![]() (B.11)
(B.11)
где ![]() — единичная импульсная функция, определенная в разделе А.4.1. Подставляя выражение (В. 11) в (В.9), получаем следующее.
— единичная импульсная функция, определенная в разделе А.4.1. Подставляя выражение (В. 11) в (В.9), получаем следующее.
![]() (В.12)
(В.12)
= ![]() (B.13)
(B.13)
Здесь было использовано просеивающее свойство единичной импульсной функции (см. раздел А.4.1) и то, что функции {![]() }, j= 1, ...,N, составляют ортонормированное множество. Таким образом, для белого гауссова шума с двусторонней спектральной плотностью мощности
}, j= 1, ...,N, составляют ортонормированное множество. Таким образом, для белого гауссова шума с двусторонней спектральной плотностью мощности ![]() Вт/Гц, мощность шума на выходе каждого из N корреляторов равна
Вт/Гц, мощность шума на выходе каждого из N корреляторов равна ![]() Вт.
Вт.
Приложение Г. Полезные соотношения
|
|
(Г.1) |
|
|
(Г.2) |
|
|
(Г.3) |
|
|
(Г.4) |
|
|
(Г.5) |
|
|
(Г.6) |
|
|
(Г.7) |
|
|
(Г.8) |
|
|
(Г.9) |
|
|
(Г.10) |
|
|
(Г.11) |
|
|
(Г.12) |
|
|
(Г.13) |
|
|
(Г.14) |
|
|
(Г.15) |
|
|
(Г.16) |
Доказательство

Замена i = (j-1)
Таким образом (j=2) переходит в (i=1), а (j=n) – в (i=n-1).
=
= ![]()
=![]()
Приложение Д. S-область, z-область и цифровая фильтрация
Д.1. Преобразование Лапласа
Напомним преобразование Фурье, приведенное в формуле (А.26) приложения А.
![]() или
или ![]() , (Д.1)
, (Д.1)
где ![]() .
.
Определим новую функцию v(t), равную x(t), умноженному на ![]() , где
, где ![]() - вещественное число, т.е. v(t) = x(t)
- вещественное число, т.е. v(t) = x(t)![]() . Фурье-образ функции v(t) будет выглядеть следующим образом.
. Фурье-образ функции v(t) будет выглядеть следующим образом.
![]()
![]()
![]() (Д.2)
(Д.2)
Таким образом, можно переписать формулу (Д.1).
![]()
![]() (Д.3)
(Д.3)
Пусть s - комплексная частота, s =![]() , тогда Фурье-образ временного сигнала x(t) можно определить следующим образом.
, тогда Фурье-образ временного сигнала x(t) можно определить следующим образом.
![]()
![]() , (Д.4)
, (Д.4)
где s — переменная Лапласа. Перепишем обратное преобразование Фурье, приведенное в формуле (А.27), через угловую частоту ![]() ; тогда
; тогда ![]() и
и
![]() (Д.5)
(Д.5)
Поскольку ![]() , из этого следует, что ds/dw = i, и мы можем определить обратное преобразование Лапласа следующим образом.
, из этого следует, что ds/dw = i, и мы можем определить обратное преобразование Лапласа следующим образом.
![]() (Д.6)
(Д.6)
Формулы (Д.4) и (Д.6) представляют пару преобразований Лапласа ![]() , или, более точно, пару двусторонних преобразований Лапласа. Если (разумно) предположить, что до момента t = 0 сигнал не существует (т.е. является причинным), то преобразование можно назвать односторонним, что записывается следующим образом.
, или, более точно, пару двусторонних преобразований Лапласа. Если (разумно) предположить, что до момента t = 0 сигнал не существует (т.е. является причинным), то преобразование можно назвать односторонним, что записывается следующим образом.
![]() (Д.7)
(Д.7)
Обратное одностороннее преобразование Лапласа аналогично преобразованию, приведенному в формуле (Д.6). Таким образом, формулы (Д.6) и (Д.7) можно называть парой односторонних преобразований Лапласа.
Д. 1.1. Стандартное преобразование Лапласа
В табл. Д.1 приведены некоторые стандартные односторонние преобразования Лапласа. Отметим, что (двустороннее) преобразование Лапласа, приведенное в формуле (Д.4), идентично преобразованию Фурье, приведенному в формуле (А.26), при s=iw, где ![]() . Для создания преобразования Лапласа x(t) умножается на "множитель сходимости"
. Для создания преобразования Лапласа x(t) умножается на "множитель сходимости" ![]() , где
, где ![]() - любое вещественное число. Таким образом, при фактическом вычислении значений интегралов преобразование Лапласа может существовать для многих функций, для которых отсутствует соответствующее преобразование Фурье. Одним из ключевых преимуществ преобразования Лапласа является возможность преобразования функций, не являющихся абсолютно интегрируемыми.
- любое вещественное число. Таким образом, при фактическом вычислении значений интегралов преобразование Лапласа может существовать для многих функций, для которых отсутствует соответствующее преобразование Фурье. Одним из ключевых преимуществ преобразования Лапласа является возможность преобразования функций, не являющихся абсолютно интегрируемыми.
Таблица Д.1. Преобразования Лапласа
|
Тип сигнала |
Временная функция |
Преобразование Лапласа |
| Импульс |
|
|
|
Единичная ступенчатая функция (Хевисайда) |
|
|
| Линейно растущая функция |
|
|
| Экспоненциальные функции |
|
|
| Синусоида |
|
|
| Косинусоида |
|
|
| Затухающая синусоида |
|
|
| Затухающая косинусоида |
|
|
Д.1.2. Свойства преобразования Лапласа
Можно показать, что если известна пара преобразований Лапласа y(t)![]() Y(s), то для запаздывающей версии сигнала, которая записывается как y(t -t0), справедливо следующее.
Y(s), то для запаздывающей версии сигнала, которая записывается как y(t -t0), справедливо следующее.
![]() (Д.8)
(Д.8)
Данное свойство называется свойством смешения во времени. Другие свойства-преобразования Лапласа приведены в табл. Д.2. Их справедливость можно проверить путем простой подстановки в интегральное выражение, описывающее соответствующее преобразование. Отметим, что соотношение ![]() между преобразованиями Фурье и Лапласа означает, что существует простой эквивалентный переход между преобразованиями, приведенными в табл. Д.1 и А.1, и свойствами, указанными в табл. Д.2 и А.2.
между преобразованиями Фурье и Лапласа означает, что существует простой эквивалентный переход между преобразованиями, приведенными в табл. Д.1 и А.1, и свойствами, указанными в табл. Д.2 и А.2.
Таблица Д.2. Свойства преобразования Лапласа
|
Свойство |
Временная функция |
Преобразование Лапласа |
|
Произвольная функция |
|
|
|
Произвольная функция |
|
|
|
Линейность |
|
|
|
Сдвиг во времени ( |
|
|
|
Масштабирование времени |
|
|
|
Модуляция |
|
|
|
Дифференцирование |
|
|
|
Интегрирование |
|
|
|
Свертка |
|
|
Д.1.3. Использование преобразования Лапласа
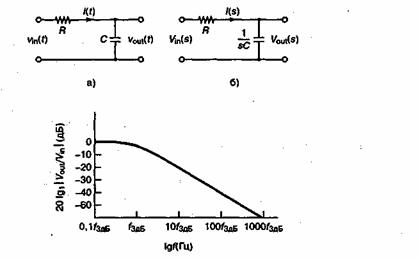
Преобразования Лапласа полезны, когда требуется решать дифференциальные (по времени) уравнения или выполнять операцию свертки. Например, для нахождения тока i(t) простой RС-цепи, показанной на рис. Д.1, отметим, что сумма напряжений на конденсаторе и сопротивлении равна входному напряжению.
![]() (Д.9)
(Д.9)
Если входное напряжение — это единичная ступенчатая функция ![]() , a, q — заряд конденсатора (в кулонах), то, применяя к обеим частям формулы (Д.9) преобразование Лапласа и используя табл. Д.1 и Д.2, получаем следующее.
, a, q — заряд конденсатора (в кулонах), то, применяя к обеим частям формулы (Д.9) преобразование Лапласа и используя табл. Д.1 и Д.2, получаем следующее.
![]() откуда следует
откуда следует  (Д.10)
(Д.10)
в)
Рис. Д.1. Использование преобразования Лапласа:
а) КС-контур; б) представление с помощью преобразования Лапласа;
в) амплитудная характеристика
(Для единичной ступенчатой функции Vin(s) = 1/s.) Затем, возвращаясь во временную область (и снова используя таблицы свойств преобразования Лапласа), получаем следующее.
![]() (Д.11)
(Д.11)
Д.1.4. Передаточная функция
С помощью преобразования Лапласа можно определить (через переменную s) передаточную функцию линейной системы. Из уравнения (Д. 10) при нулевом сопротивлении R= 0 импеданс конденсатора можно вычислить следующим образом.
 (Д.12)
(Д.12)
Входное и выходное напряжения (в s-области) можно записать следующим образом.
![]() и
и ![]() (Д.13)
(Д.13)
Таким образом, (в s-области) передаточную функцию можно определить следующим образом.
 (Д.14)
(Д.14)
Д.1.5. Фильтрация нижних частот в RC-цепи
Пусть на вход RС-цепи подается комплексная синусоида ![]() . Используя сказанное выше, можем перейти к преобразованию Фурье, положив s = iw, где
. Используя сказанное выше, можем перейти к преобразованию Фурье, положив s = iw, где ![]() . Таким образом, из передаточной функции можно получить частотную характеристику цепи.
. Таким образом, из передаточной функции можно получить частотную характеристику цепи.
 (Д.15)
(Д.15)
Для малых значений ![]() ; а для больших значений
; а для больших значений ![]() . Если
. Если ![]() , то |H(f)|
, то |H(f)|![]() . Отметим, что
. Отметим, что ![]() дБ; следовательно, f0 - это частота по уровню -3дБ, когда выходное напряжение вдвое меньше входного. Следовательно, формула (Д.15) задает тот же фильтр нижних частот, что и формула (1.63). Низкие частоты проходят через фильтр, а высокие — подавляются; данная ситуация показана на рис. Д.1, в.
дБ; следовательно, f0 - это частота по уровню -3дБ, когда выходное напряжение вдвое меньше входного. Следовательно, формула (Д.15) задает тот же фильтр нижних частот, что и формула (1.63). Низкие частоты проходят через фильтр, а высокие — подавляются; данная ситуация показана на рис. Д.1, в.
Д.1.6. Полюсы и нули
Линейные системы, а, следовательно, и (линейные) аналоговые фильтры, можно представить через дифференциальные уравнения во временной области. Рассмотрим, например, следующее уравнение второго порядка.
 (Д.16)
(Д.16)
Реализация дифференцирования и/или интегрирования различных порядков происходит с использованием емкостей и индуктивностей вместе с усилителями с обратной связью, имеющими нужный порядок [2]. Применяя преобразование Лапласа к обеим частям уравнения (Д. 16), получаем более удобное (с точки зрения математики и формы записи) уравнение Лапласа.
Y(s) = As2X(s) + BsX(s) + CX(s) + Ds2Y(s) + EsY(s) (Д.17)
Передаточная функция записывается в следующем виде.
 (Д.18)
(Д.18)
Корни числителя ![]() называются нулями, а корни знаменателя
называются нулями, а корни знаменателя ![]() - полюсами. Отметим, что если А, В и С - вещественны, нули
- полюсами. Отметим, что если А, В и С - вещественны, нули ![]() являются комплексно-сопряженными.
являются комплексно-сопряженными.
Д.1.7. Устойчивость линейных систем
Рассмотрим однополюсное уравнение, соответствующее некоторой линейной системе.
![]() (Д.19)
(Д.19)
Импульсную характеристику данной системы можно (используя табл. Д.1) найти как обратное преобразование Лапласа выражения (Д.19); если ![]() , то импульсная характеристика выглядит следующим образом.
, то импульсная характеристика выглядит следующим образом.
![]() (Д.20)
(Д.20)
Видим, что Re[![]() ] =
] =![]() ; если
; если ![]() >0, импульсная характеристика расходится с увеличением t (времени). В то же время, если
>0, импульсная характеристика расходится с увеличением t (времени). В то же время, если ![]() <0, импульсная характеристика сходится с увеличением t. Член
<0, импульсная характеристика сходится с увеличением t. Член ![]() — это комплексная (осциллирующая) синусоида (см. раздел А.2.1). Используя формулировку, несколько отличающуюся от применяемых ранее, можно сказать, что система устойчива, если все полюса в s-области имеют отрицательную действительную часть.
— это комплексная (осциллирующая) синусоида (см. раздел А.2.1). Используя формулировку, несколько отличающуюся от применяемых ранее, можно сказать, что система устойчива, если все полюса в s-области имеют отрицательную действительную часть.
Таким образом, если изобразить полюса на комплексной s-плоскости, все они должны располагаться в ее левой части. На рис. Д.2 показана область устойчивости и приведен пример устойчивой передаточной функции третьего порядка, все полюса которой попадают в левую часть комплексной s-плоскости, т.е. имеют отрицательную действительную часть. Отметим, что нули функции могут быть в левой или правой части s-плоскости, и это не влияет на устойчивость.
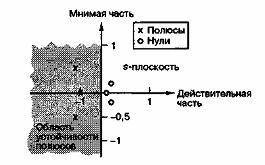
Нули в точках s = 0,1, 0,2-0,2i, 0,2+0,2i
Полюсы в точках s= -1, -0,5-0,5i, -0,5+0,5i
Рис. Д.2. Нули и полюса передаточной функции, изображенные в s-области
Если цепь имеет более одного полюса, передаточную функцию можно рассматривать как последовательность однополюсных функций.
 (Д.21)
(Д.21)
Для устойчивости все полюсы должны находиться в левой части комплексной плоскости. Отметим, что для реальных схем с вещественными коэффициентами Лапласа (т.е. в уравнении (Д. 16) а, В, С, D и Е — вещественные) полюсы и нули будут вещественными или будут разбиты на пары комплексно-сопряженных величин, как показано на рис. Д.2.
Для нашего предыдущего примера RС-цепи передаточная функция в формуле (Д.14) является безусловно устойчивой, поскольку ![]() — это всегда положительная величина, что, разумеется, является ожидаемым результатом. Неустойчивость в линейных системах возникает только при наличии в них обратной связи (рекурсии), например, при использовании фильтров с инвертирующими или неинвертирующими усилителями.
— это всегда положительная величина, что, разумеется, является ожидаемым результатом. Неустойчивость в линейных системах возникает только при наличии в них обратной связи (рекурсии), например, при использовании фильтров с инвертирующими или неинвертирующими усилителями.
Д.2. z-преобразование
По сути, z-преобразование — это дискретный эквивалент преобразования Лапласа. Оно делает возможным удобный математический анализ (стационарный анализ и анализ переходных процессов) и манипулирование сигналами и спектрами. Возможно, наиболее распространенным современным применением z-преобразования является описание дискретных систем и анализ их устойчивости.
z-преобразование позволяет вычислять свертку входного сигнала и характеристики дискретной линейной системы в математически удобном виде. Кроме того, могут определяться нули и полюса системы, что позволяет извлекать информацию о динамическом поведении и устойчивости дискретной системы. Следует отметить, что нули и полюса z-преобразования отличаются от нулей и полюсов преобразования Лапласа.
Д.2.1. Вычисление z-преобразования
z-преобразование можно вывести непосредственно из преобразования Лапласа, определенного в формуле (Д.4), рассмотрев для этого сигнал x(t), выборка которого производится каждые T секунд. Таким образом, сигнал будет представлен как функция дискретного времени: x(0), х(Т), х(2Т), ...= {x(kT)}. Дискретные данные представляют множество взвешенных и смещенных дельта-функций, применение к которым преобразования Лапласа дает следующий результат (использовано свойство сдвига во времени).
![]() (Д.22)
(Д.22)
Введем параметр z =![]() и заменим дискретное время kT номером выборки k. В результате получаем следующее.
и заменим дискретное время kT номером выборки k. В результате получаем следующее.
![]() (Д.23)
(Д.23)
Приведем в качестве примера результат применения z-преобразования к единичной ступенчатой функции (Хевисайда).
![]() (Д.24)
(Д.24)
Выше при суммировании геометрической прогрессии было использовано предположение |z| < 1 (область сходимости). В табл. Д.З и Д.4 приведены, соответственно, примеры применения z-преобразования к некоторым распространенным функциям и представлены полезные свойства данного преобразования.
Таблица Д.3. z-преобразование некоторых функций
|
Тип сигнала |
Временная функция |
z-преобразование |
| Импульс |
|
|
| Задержанный импульс |
|
|
| Единичная ступенчатая функция (Хевисайда) |
|
|
| Линейно растущая функция |
|
|
| Экспоненциальная функция |
|
|
| Синусоида |
|
|
| Косинусоида |
|
|
Таблица Д.4. Свойства z-преобразования
|
Свойство |
Временная функция |
Преобразование Лапласа |
| Произвольная функция |
|
|
| Произвольная функция |
|
|
| Линейность |
|
|
| Сдвиг во времени |
|
|
| Модуляция |
|
|
| Экспоненциальное масштабирование |
|
|
| Линейное масштабирование |
|
|
| Свертка |
|
|
Д.2.2. Обратное z-преобразование
Переход из z-области во временную область выполняется посредством обратного z-преобразования [2].
 (д.25)
(д.25)
Здесь интегрирование в комплексной области ![]() проводится по любому простому контуру в области сходимости X(z), включающему точку z = 0. Как правило, вычисление обратного z-преобразования сложнее вычисления прямого. Обычно приходится раскладывать подынтегральное выражение на сумму рациональных дробей, делить полиномы, использовать теорему о вычетах и составлять разностные уравнения. Поэтому большая часть z-преобразований и обратных z-преобразований вычисляется с использованием таблиц интегралов и их свойств, так что явного вычисления выражения (Д.25) обычно удается избежать. При современном анализе цифровых сигналов и систем используются программные пакеты, подобные SystemView [1], а z-преобразование большей частью представляет собой просто аналитическую форму записи, удобную для определения устойчивости дискретных сигналов и систем.
проводится по любому простому контуру в области сходимости X(z), включающему точку z = 0. Как правило, вычисление обратного z-преобразования сложнее вычисления прямого. Обычно приходится раскладывать подынтегральное выражение на сумму рациональных дробей, делить полиномы, использовать теорему о вычетах и составлять разностные уравнения. Поэтому большая часть z-преобразований и обратных z-преобразований вычисляется с использованием таблиц интегралов и их свойств, так что явного вычисления выражения (Д.25) обычно удается избежать. При современном анализе цифровых сигналов и систем используются программные пакеты, подобные SystemView [1], а z-преобразование большей частью представляет собой просто аналитическую форму записи, удобную для определения устойчивости дискретных сигналов и систем.
Д.З. Цифровая фильтрация
С помощью подходящих аналоговых и цифровых компонентов цифровой фильтр можно настроить на выполнение селекции желаемой частоты или модификации фазы. На рис. Д.З показаны компоненты, необходимые для создания цифрового фильтра, дающего фильтрованную последовательность y(k) при входной последовательности x(k) [2].Выходной сигнал фильтра y(k) создается из взвешенной суммы предыдущих входных сигналов x(k) и предыдущих выходных сигналов y(k-п), где п>0. На рис. Д.4 показан поточный граф сигнала (состоит только из сумматоров, умножителей и схем задержки выборки) для цифрового фильтра с четырьмя весовыми коэффициентами прямой связи и тремя весовыми коэффициентами обратной связи. (Задержка, длительность которой равна длительности одной выборки, обозначена символом ![]() . Довольно часто подобные графы изображаются с использованием обозначений временной области и z-области, где для представления задержки применяется запись z-1; несмотря на широкое распространение такой формы записи, она не является строгой.)
. Довольно часто подобные графы изображаются с использованием обозначений временной области и z-области, где для представления задержки применяется запись z-1; несмотря на широкое распространение такой формы записи, она не является строгой.)
Рис. Д.3. Уравнения цифрового фильтра реализуются на устройстве цифровой обработки сигналов, преобразовывающем входной дискретный информационный сигнал в выходной информационный сигнал
Рис. Д.4. Общая схема цифрового фильтра
Выход данного фильтра описывается следующим выражением.
y(k) = a0x(k) + alx(k-1) + a2x(k-2) + a3x(k-3) + b1у(k -1) + b2у(k - 2) + b3у(k -3) =
=![]() (Д.26)
(Д.26)
Применение z-преобразования к формуле (Д.26) даёт следующий результат.
Y(z)=a0X(z)+alX(z)z-1+a2X(z)z-2+a3X(z)z-3+b1Y(z)z-1+b2Y(z)z-2+b3Y(z)z-3 (Д.27)
Д.3.1. Передаточная функция цифрового фильтра
Передаточная функция цифрового фильтра, изображенного на рис. Д.4, получается после преобразования выражения (Д.27) и выглядит следующим образом.
 (Д.28)
(Д.28)
Здесь через ![]() обозначены нули, а через
обозначены нули, а через ![]() — полюса z-области, которые находятся как корни полинома числителя A(z) и полинома знаменателя B(z). Для цифрового фильтра, подобного изображенному на рис. Д.4, но имеющего N весовых коэффициентов прямой связи и М-1 коэффициентов обратной связи, полиномы числителя и знаменателя в передаточной функции, Приведенной в формуле (Д.28), будут иметь, соответственно, порядок N к М.
— полюса z-области, которые находятся как корни полинома числителя A(z) и полинома знаменателя B(z). Для цифрового фильтра, подобного изображенному на рис. Д.4, но имеющего N весовых коэффициентов прямой связи и М-1 коэффициентов обратной связи, полиномы числителя и знаменателя в передаточной функции, Приведенной в формуле (Д.28), будут иметь, соответственно, порядок N к М.
Д.3.2. Устойчивость однополюсного фильтра
Вследствие наличия в потоковом графе множественных обратных связей, цифровой фильтр может быть (численно) неустойчивым. Рассмотрим, например, фильтр с одним весовым коэффициентом обратной связи, изображенный на рис. Д.5.
y(k)= x(k) + by(k-1) (Д.29)
Импульсная характеристика данного фильтра (т.е. подача на вход единичного импульса ![]() плюс применение принципов свертки, описанных в разделе А.5) имеет следующий вид.
плюс применение принципов свертки, описанных в разделе А.5) имеет следующий вид.
h(k) = bk (Д.30)
Если |b|<1, импульсная характеристика фильтра сходится (устойчива); если |b|>1, импульсная характеристика фильтра расходится (неустойчива). На рис. Д.5 показана сходящаяся импульсная характеристика с |b|< 1; более точно, -1<b<1. Применение z-преобразования к выражению (Д. 29) дает следующее.
Рис. Д.5. Потоковый граф фильтра с одной обратной связью:
а) во временной области; б) в z-области
 (Д.31)
(Д.31)
Используя формулу (Д.31), получаем потоковый граф в z-области (рис. Д.5, б), соответствующий потоковому графу во временной области, изображенному на рис. Д.5, а. Элемент задержки (который на рис. Д.5, а обозначен через А) теперь представляется как ![]() , а вход и выход заданы как z-образы Х(z) и Y(z). Отметим, впрочем, что общая топология двух графов одинакова. (Это частично объясняет то, что потоковые графы цифровых фильтров часто изображаются с использованием обозначений временной области и z-области.) Критерий устойчивости |b|<1) можно сформулировать следующим образом: система устойчива, если полюсы (или корни полинома знаменателя) передаточной функции цифрового фильтра меньше единицы.
, а вход и выход заданы как z-образы Х(z) и Y(z). Отметим, впрочем, что общая топология двух графов одинакова. (Это частично объясняет то, что потоковые графы цифровых фильтров часто изображаются с использованием обозначений временной области и z-области.) Критерий устойчивости |b|<1) можно сформулировать следующим образом: система устойчива, если полюсы (или корни полинома знаменателя) передаточной функции цифрового фильтра меньше единицы.
Д.3.3. Устойчивость произвольного фильтра
При изучении факторизованной передаточной функции, приведенной в формуле (Д.28), поточный граф, представленный на рис. Д.4 для временной области, можно преобразовать в поточный граф в z-области (рис. Д.6). Последний граф — это, фактически, графическое представление формулы (Д.28), переписанной в следующем виде.
 (Д.32)
(Д.32)
Рис. Д.6. Цифровой фильтр как последовательность каскадов прямой и обратной связи первого порядка
В данном выражении (и на рисунке) обособлены все блоки первого порядка, описываемые нулями и полюсами фильтра. Чтобы фильтр был устойчивым, модули всех полюсов ![]() каскада должны быть меньше 1. Если хотя бы один блок первого порядка неустойчив (или расходится), неустойчивым является и весь каскад. Как отмечалось для преобразования Лапласа, полюса (и нули) z-области могут быть комплексными, поэтому в качестве критерия устойчивости используется их абсолютная величина, а не амплитуда. (Стоит сказать, что реализация поточного графа, представленная на рис. Д.6, — это всего лишь иллюстрация принципов анализа; реальный цифровой фильтр никогда не реализуется в подобной факторизованной форме, поскольку в этом случае некоторые множители могут быть комплексными, а это может повлечь за собой ненужное усложнение вычислительных требований фильтров.)
каскада должны быть меньше 1. Если хотя бы один блок первого порядка неустойчив (или расходится), неустойчивым является и весь каскад. Как отмечалось для преобразования Лапласа, полюса (и нули) z-области могут быть комплексными, поэтому в качестве критерия устойчивости используется их абсолютная величина, а не амплитуда. (Стоит сказать, что реализация поточного графа, представленная на рис. Д.6, — это всего лишь иллюстрация принципов анализа; реальный цифровой фильтр никогда не реализуется в подобной факторизованной форме, поскольку в этом случае некоторые множители могут быть комплексными, а это может повлечь за собой ненужное усложнение вычислительных требований фильтров.)
Д.3.4. Диаграмма полюсов-нулей и единичная окружность
Если комплексные нули и полюса фильтра или линейной системы изобразить на плоскости с действительной и мнимой осями, данную плоскость можно будет назвать z-плоскостью (или комплексной плоскостью). Система является устойчивой, если все ее полюса находятся внутри единичной окружности. На рис. Д.7 показан вид z-плоскости для следующей передаточной функции.
Рис. Д. 7. Полюсы и нули, изображенные на z-плоскости
 (Д.33)
(Д.33)
Нули данной функции - ![]() и
и ![]() , полюсы -
, полюсы - ![]() и
и ![]() . Поскольку все полюсы лежат внутри единичной окружности, данный фильтр является устойчивым.
. Поскольку все полюсы лежат внутри единичной окружности, данный фильтр является устойчивым.
Д.3.5. Дискретное преобразование Фурье импульсной характеристики цифрового фильтра
Частотная характеристика цифрового фильтра вычисляется из дискретного преобразования Фурье (discrete Fourier transform — DFT, ДПФ) импульсной характеристики фильтра. Напомним вид преобразования Фурье, приведенного в формуле (А.26).
![]() (Д.34)
(Д.34)
Данную формулу можно использовать для вычисления Фурье-образа импульсной характеристики фильтра. Ее можно упростить, полагая, что используется дискретная версия сигнала x(t), причем выборка сигнала производится каждые Тs = ![]() секунд.
секунд.
![]() (Д.35)
(Д.35)
Разумеется, импульсная характеристика цифрового фильтра является причинной, и первая выборка импульсной характеристики производится в момент k = 0, а последняя — в момент k = N- 1, что в сумме дает N выборок на одно преобразование. Таким образом, для данного конечного числа выборок можно переписать формулу (Д.25), использовав не явное время kTs, а число выборок k.
![]() (Д.36)
(Д.36)
Отметим, что значение выражения (Д.36) вычисляется для непрерывной частотной переменной f. В действительности же нам требуется знать это значение для некоторых определенных частот — нулевой частоты (постоянной составляющей) и гармоник "собственной" частоты; всего N дискретных; частот: 0, f0, 2f0 и так до f5, где ![]() .
.
![]() для n от 0 до N-1 (Д.37)
для n от 0 до N-1 (Д.37)
Выражение выше можно упростить, использовав только временной индекс k и частотный индекс п. В результате получаем дискретное преобразование Фурье (discrete Fourier transform — DFT, ДПФ).
![]() для n от 0 до N-1 (Д.38)
для n от 0 до N-1 (Д.38)
Поскольку частота дискретизации сигнала x(k) равна fs выборок/с, сигнал включает налагающиеся (или дублирующиеся) компоненты на частотах свыше ![]() . Следовательно, при вычислении значения выражения (Д.38) достаточно ограничиться частотами до
. Следовательно, при вычислении значения выражения (Д.38) достаточно ограничиться частотами до ![]() . Отметим, что формула (Д.38) аналогична формуле (Д.23), если положить
. Отметим, что формула (Д.38) аналогична формуле (Д.23), если положить ![]() для последовательности длиной N выборок.
для последовательности длиной N выборок.
Д.4. Фильтры с конечной импульсной характеристикой
На настоящий момент наиболее распространенный тип цифровых фильтров - это фильтры с конечной импульсной характеристикой (КИХ), имеющие, как понятно из названия, импульсную характеристику конечной длительности. Данные фильтры не имеют весовых коэффициентов обратной связи (см. рис. Д.4); следовательно, можно сделать вывод об их безусловной устойчивости. Выход фильтра с конечной импульсной характеристикой, приведенного на рис. Д.8, описывается следующим выражением.
Рис. Д.8. Цифровой фильтр с конечной импульсной характеристикой
![]() (Д.39)
(Д.39)
Таким образом, передаточная функция фильтра имеет только нули и не имеет полюсов.
 (Д.40)
(Д.40)
По сути, работа фильтра с конечной импульсной характеристикой — это вычисление текущего среднего; когда выход - это взвешенное среднее N последних входных выборок. Таким образом, фильтры данного типа часто называются фильтрами скользящего среднего (moving average filter). Кроме того, их еще называют линиями задержки с отводами (tapped delay line) и трансверсальными фильтрами (transversal filter).
Д.4.1. Структура фильтра с конечной импульсной характеристикой
В настоящее время цифровые фильтры с конечной импульсной характеристикой разрабатываются с использованием современного программного обеспечения, такого как SystemView [1]. При этом в основе разработки лежит график амплитудной характеристики, на котором указываются допустимые отклонения и пользовательские требования (рис. Д.9). Затем используются классические методы разработки фильтров, такие как метод Паркса-Мак-Леллана (Parks, McLellan), замена Ремеза (Remez Exchange), окно Кайзера и др. [4], в результате чего создается фильтр с подходящей частотной характеристикой, имеющей минимальное число весовых коэффициентов. Если не оговорено противное, большинство фильтров с конечной импульсной характеристикой разрабатывается в расчете на линейное изменение фазы или постоянную групповую задержку (что соответствует симметричной импульсной характеристике).
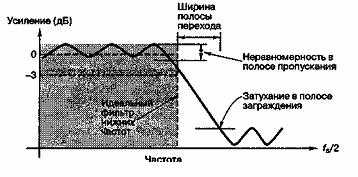
Рис. Д.9. Типичная амплитудная характеристика фильтра нижних частот. Чем строже требования к затуханию в полосе заграждения и полосе перехода и чем ниже допустимая неравномерность в полосе пропускания, тем больше требуется весовых коэффициентов
На рис. Д.10 показаны импульсная и частотная характеристики цифрового фильтра со следующими параметрами: частота среза = 1000Гц, затухание в полосе заграждения = 20дБ, неравномерность в полосе пропускания = 3дБ, полоса перехода = 500Гц, частота дискретизации, fs = 10000Гц. Если нужен фильтр с более строгими требованиями к частотной характеристике (например, нужно более сильное затухание в полосе заграждения), то, скорее всего, на стадии проектирования фильтра с конечной импульсной характеристикой обнаружится, что требуется больше весовых коэффициентов [4].
Д.4.2. Дифференциатор с конечной импульсной характеристикой
Рассмотрим простой цифровой дифференциатор, показанный на рис. Д.11. После изучения выхода для входных синусоид с высокой и низкой частотами, интуитивно можно предположить, что данный дифференциатор — это фильтр верхних частот. Выходная последовательность данного фильтра описывается следующим выражением.
![]() (Д.41)
(Д.41)
Применение z-преобразования к обеим частям формулы, (Д.41) приводит к следующему результату.
![]() (Д.42)
(Д.42)
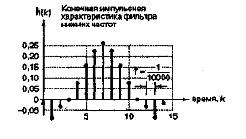
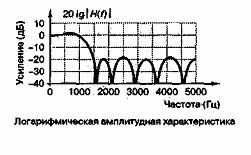
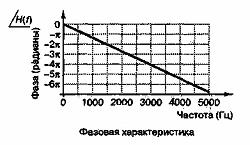
Рис. Д.10. Импульсная характеристика h(n) = wn и частотная харак-теристика Н(f) фильтра нижних частот с 15 весовыми коэффициентами; частота дискретизации = 10 000Гц, частота среза = 1000Гц
Рис. Д. 11. Дифференциатор/фильтр верхних частот
Следовательно, передаточная функция имеет следующий вид.
 (Д.43)
(Д.43)
На рис. Д.12 показано, почему данная схема действует как фильтр верхних частот. По сути, выход фильтра — это разность двух последних выборок. Если разность последовательных выборок мала (как для случая низкой частоты), выход будет небольшим. Если разность велика (как для высоких частот), выход будет большим. Если на вход подать сигнал постоянного тока, то выходная амплитуда будет нулевой, т.е. будет происходить бесконечное затухание. Частотную характеристику также можно найти как Фурье-образ импульсной характеристики.
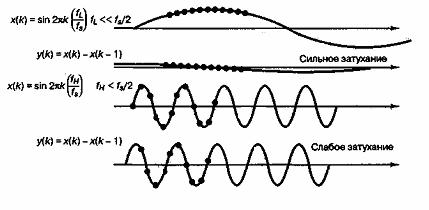
Рис. Д.12. Цифровой дифференциатор, действующий как фильтр верхних частот
Если весовые коэффициенты фильтра изменить с {1, -1} на {1/Т, -1/Т}, где частота дискретизации fs=1/Т, то для входных низкочастотных сигналов выход, у(k), — это приблизительно дифференциал входа.
 (Д.44)
(Д.44)
Д.5. Фильтры с бесконечной импульсной характеристикой
Фильтры с бесконечной импульсной характеристикой (infinite impulse response — IIR, БИХ) обычно создаются из аналоговых прототипов с использованием отображения из s-плоскости в z-плоскости. Как понятно из названия, импульсная характеристика таких фильтров (предполагая арифметику бесконечной точности) может иметь бесконечную длительность. Данные фильтры имеют весовые коэффициенты и прямой, и обратной связи, подобно тому, как показано на рис. Д.4. Вследствие рекурсивной природы поточного графа, данные фильтры могут иметь весьма длительные импульсные характеристики (до нескольких весовых коэффициентов). Следовательно, фильтры с бесконечной импульсной характеристикой могут создаваться с меньшим числом весовых коэффициентов, чем фильтры с конечной импульсной характеристикой при аналогичных функциональных амплитудных характеристиках. В общем случае в цифровых фильтрах с бесконечной импульсной характеристикой фаза изменяется нелинейно.
Д.5.1. Оператор левосторонней разности
Уравнение (Д.44) позволяет связать переменную преобразования Лапласа s (непрерывное время) и переменную z-преобразования z (дискретное время). Известно, что при преобразовании Лапласа дифференцирование по времени (d/dt) переходит в умножение на переменную s.
![]() (Д.45)
(Д.45)
Возьмем, например, следующую характеристику фильтра Баттерворта.
![]() (Д.46)
(Д.46)
Данную аналоговую схему (фильтр нижних частот) можно аппроксимировать дискретно, подставив приближение
![]() (Д.47)
(Д.47)
в уравнение (Д.46). Это дает следующее уравнение в z-области.
 (Д.48)
(Д.48)
При низких частотах, когда приближение (Д.47) является "хорошим", данное преобразование может давать "разумный" цифровой эквивалент аналогового фильтра нижних частот. (Уравнение (Д.47) иногда называется "оператором левосторонней разности".) К сожалению, данное отображение является очень плохим при высоких частотах, а, следовательно, оно не может использоваться при создании фильтров верхних частот. Таким образом, на практике оно применяется редко.
Д.5.2. Использование билинейного преобразования для создания фильтров с бесконечной импульсной характеристикой
Билинейное преобразование получается при замене s следующим приближением.
 (Д.49)
(Д.49)
Данная подстановка приводит к отображению, сохраняющему устойчивость аналогового прототипа и дающему фильтры, значительно лучшие по своим характеристикам, чем в предыдущем случае (уравнение (Д.47)) [2]. В SystemView [1] билинейное преобразование используется для создания цифровых фильтров из стандартных аналоговых прототипов, таких как фильтры Баттерворта, эллиптические фильтры и фильтры Чебышева. Отметим, что билинейное преобразование всегда дает фильтр, имеющий нули и полюсы; следовательно, данные фильтры имеют бесконечную импульсную характеристику (БИХ).
Д.5.3. Интегратор с бесконечной импульсной характеристикой
Цифровой интегратор — это, по сути, БИХ-фильтр с одним весовым коэффициентом.
![]() (Д.50)
(Д.50) ![]() В z-области передаточная функция дискретного интегратора получается из соотношения
В z-области передаточная функция дискретного интегратора получается из соотношения
Y(z) = X(z) + z-1Y(z), (Д.51)
которое дает следующее.
 (Д.52)
(Д.52)
Реализация простого цифрового интегратора и графическое представление связи с интегрированием по непрерывному времени показаны на рис. Д.13.
Рис. Д. 13. Однополюсный фильтр, действующий как интегратор. В контур обратной связи часто вводится весовой коэффициент, немного меньший 1, который обеспечивает "забывание " интегратора
Если в контур обратной связи вводится весовой коэффициент, меньший 1 (скажем, 0,99), интегратор часто называют квазиинтегратором (leaky integrator). При рассмотрении в частотной области, характеристики (квази) интегратора и фильтра нижних частот не отличаются.
Литература
1. SystemViev DSP Communications Software. Elanix, Westlake Village, CA, 2000.
2. Porat. B. A Course in Digital Signal Processing. John Wiley & Cons, 1997.
3. Moon T. K., Stirling W. C. Mathematical Methods and Algorithms for Digital Signal Processing. Prentice Hall, 2000.
4. Stewart R. W. The DSPedia: A Multimedia Resource for DSP. BlueBox Multimedia, UK, 2000.
Приложение Е. Перечень символов
|
|
Коэффициент j-й базисной функции |
|
|
Сигнальный компонент на выходе j-го коррелятора |
|
|
Максимальная амплитуда сигнала |
|
|
Эффективная площадь поверхности (антенны) |
|
|
Односторонняя ширина полосы контура |
|
|
Скорость света = |
|
|
Пропускная способность канала |
|
|
Электрическая емкость |
|
|
Отношение средней мощности несущей к спектральной плотности мощности шума |
|
|
Расстояние |
|
|
Эталонное расстояние |
|
|
Просвет |
|
|
Минимальное расстояние |
|
|
Время задержки (сообщения) |
|
|
Избыточность языка |
|
|
Преобразование дешифрования |
|
|
Основание натурального логарифма |
|
е |
Вектор ошибочной комбинации |
|
|
Сигнал ошибки |
|
|
Полином ошибочной комбинации |
|
|
Преобразование шифрования |
|
|
Энергия сигнала x(t) Математическое ожидание случайной переменной X |
|
|
Эффективная излучённая мощность относительно изотропного источника |
|
|
Отношение энергии бита к спектральной плотности мощности станции-постановщика помех |
|
|
Отношение энергии бита к спектральной плотности мощности шума |
|
|
Отношение энергии канального символа к спектральной плотности мощности шума |
|
|
Частота (герц) |
|
|
Частота несущей волны |
|
|
Максимальная частота |
|
|
Ширина полосы когерентности |
|
|
Доплеровское расширение полосы частот |
|
|
Нижняя частота среза фильтра |
|
|
Верхняя частота среза фильтра |
|
|
Шум-фактор |
|
|
Фурье-преобразование функции x(t) |
|
|
Обратное Фурье-преобразование функции X(f) |
|
|
Поле |
|
|
Конечное поле |
|
|
Псевдослучайная кодовая функция |
|
|
Полиномиальный генератор (для циклического кода) |
|
|
Коэффициент усиления антенны |
|
|
Эффективность кодирования |
|
|
Матрица генератора (для линейных блочных кодов) |
|
|
Нормированный объем информации |
|
|
Коэффициент расширения спектра |
|
|
Спектральная плотность мощности сигнала x(t) |
|
|
Импульсная характеристика сети |
|
|
Импульсная характеристика канала |
|
|
Матрица проверки четности для кода |
|
|
i-я гипотеза |
|
|
Матрица Адамара |
|
|
Частотная передаточная функция сети |
|
|
Оптимальная частотная передаточная функция |
|
|
Энтропия информационного источника X |
|
|
Условная энтропия (энтропия X при условии Y) |
|
|
Форма кривой электрического тока |
|
|
Электрический ток |
|
|
Модифицированная функция Бесселя первого рода нулевого порядка |
|
|
Самоинформация информационного источника X |
|
|
Средняя принятая мощность станции-постановщика помех |
|
|
Спектральная плотность мощности станции-постановщика помех |
|
|
Отношение средней принятой мощности станции-постановщика помех к средней мощности сигнала |
|
|
Число бит в М-арном множестве сигналов |
|
|
Степень кодирования (отношение длины исходного блока информации к длине его кодированного представления) |
|
|
Длина кодового ограничения сверточного кодера |
|
|
Ключ, определяемый схемой шифрования или преобразованием дешифрования |
|
|
Число бит квантования |
|
|
Правдоподобие информационного бита dk |
|
|
Длина упреждения в сверточком декодировании с обратной связью |
|
|
Число ответвляющихся слов в последовательности |
|
|
Число уровней квантования |
|
|
Логарифмическое отношение правдоподобий информационного бита |
|
|
Внешнее логарифмическое отношение правдоподобий |
|
|
Потери в свободном пространстве |
|
|
Другие потери |
|
|
Потери в тракте связи |
|
|
Время наблюдения |
|
|
Время наблюдения для ISI, введенной каналом |
|
|
Время наблюдения для контролируемой ISI |
|
|
Канальное логарифмическое отношение правдоподобий |
|
|
Вектор сообщения |
|
|
Полином сообщения |
|
|
Бит данных |
|
|
Резерв |
|
|
Размер множества сигналов |
|
|
Маркировка кода, где п — общее число бит, a k — число бит в кодовом слове |
|
|
Среднее число бит на символ |
|
|
Переменная случайного шума на выходе коррелятора в момент t = Т |
|
|
Гауссов процесс шума |
|
|
Мощность шума |
|
|
Расстояние единственности |
|
|
Уровень односторонней спектральной плотности мощности белого шума |
|
|
Отношение средней мощности шума к средней мощности сигнала |
|
|
Вероятность ошибки в канальном символе |
|
|
Бит четности |
|
|
Мгновенная мощность |
|
|
Функция плотности вероятности непрерывной случайной переменной |
|
|
Функция плотности вероятности х при условии у |
|
|
Массив четности |
|
|
Вероятность битовой ошибки |
|
|
Вероятность символьной ошибки |
|
|
Вероятность ложной тревоги |
|
|
Вероятность несоответствия |
|
|
Вероятность блочной ошибки или ошибки сообщения |
|
|
Вероятность необнаруженной ошибки |
|
|
Отношение средней принятой мощности сигнала к спектральной плотности мощности шума |
|
|
Полином остатка |
|
|
Вероятность дискретной случайной переменной |
|
|
Средняя мощность сигнала x(t) |
|
|
Шаг квантования |
|
|
Полином частного |
|
|
Гауссов интеграл ошибок |
|
|
Коэффициент сглаживания фильтра |
|
|
Истинная интенсивность языка |
|
|
Абсолютная интенсивность языка |
|
|
Принятый сигнал |
|
|
Скорость передачи данных (бит/с) |
|
|
Корреляционная функция разнесения частоты |
|
|
Корреляционная функция разнесения времени |
|
|
Скорость передачи кодовых или канальных бит (кодовых бит/с) |
|
|
Скорость передачи элементарных сигналов (элементарных сигналов/с) |
|
|
Скорость передачи символов (символов/с) |
|
|
Автокорреляционная функция сигнала x(t) |
|
|
Электрическое сопротивление |
|
|
Сигнал |
|
|
Оценка сигнала |
|
|
Доплеровская спектральная плотность мощности |
|
|
Профиль интенсивности при многолучевом распространении |
|
|
Вектор сигнала |
|
|
Знаковая функция х |
|
|
Состояние в момент k |
|
|
Мощность сигнала |
|
|
Вектор синдрома |
|
|
Отношение средней мощности сигнала к средней мощности помех |
|
|
Отношение средней мощности сигнала к средней мощности шума |
|
|
Отношение мощности сигнала к мощности шума |
|
|
Фурье-образ сигнала s(t) |
|
|
Полином синдрома |
|
|
Число исправимых ошибок в коде коррекции ошибок |
|
|
Независимая переменная времени |
|
|
Временная задержка |
|
|
Объем информации, переданной от i к j |
|
|
Длительность импульса |
|
|
Длительность символа |
|
|
Передаточная функция или производящая функция сверточного кода |
|
|
Время передачи на одной частоте |
|
|
Длительность перехода |
|
|
Интервал дискретизации |
|
|
Температура |
|
|
Температура антенны |
|
|
Эффективная температура линии связи |
|
|
Задержка многолучевого распространения (максимальная) |
|
|
Время когерентности |
|
|
Эффективная температура приемника |
|
|
Температура системы |
|
|
Время синхронизации |
|
|
Кодовый символ |
|
|
Единичная ступенчатая функция |
|
|
Вектор кодового слова |
|
|
Полином кодового слова |
|
|
Относительная скорость |
|
|
Форма кривой электрического напряжения |
|
|
Дисперсия случайной переменной X |
|
|
Скорость |
|
|
Сигнал станции-постановщика помех |
|
|
Ширина полосы |
|
|
Ширина полосы фильтра |
|
|
Двусторонняя ширина полосы |
|
|
Ширина полосы шумового эквивалента |
|
|
Ширина полосы расширения спектра |
|
|
Выход согласованного фильтра или коррелятора |
|
|
Прямая метрика состояния в момент k |
|
|
Обратная метрика состояния в момент k |
|
|
Отношение SNR, усредненное по подъемам и спадам замирания |
|
|
Метрика состояния для состояния а |
|
|
Порог (принятия) решения |
|
|
Оптимальный порог |
|
|
Правдоподобие кодового слова |
|
|
Фракционный уход частоты за день |
|
|
Метрика ветви в момент k |
|
|
Дельта-функция Кронекера |
|
|
Импульсная функция (дельта-функция Дирака) |
|
|
Ошибка |
|
|
Характеристика демпфирования контура (контур второго порядка) |
|
|
Эффективность антенны |
|
|
Переменная фаза |
|
|
Фурье-образ |
|
|
Постоянная Больцмана, |
|
|
Отношение правдоподобий бита данных dk |
|
|
Совместная вероятность |
|
|
Длина волны |
|
|
Скорость поступления пакетов |
|
|
Число "пи", 3,14159 |
|
|
Часть полосы частот, подвергающаяся воздействию помех |
|
|
Часть времени, в течение которого "включены" помехи |
|
|
Нормированное отношение сигнал/шум контура |
|
|
Нормированная пропускная способность сообщений |
|
|
Число исправимых стираний в коде коррекции ошибок |
|
|
Коэффициент временной корреляции |
|
|
Значение |
|
|
Среднеквадратическое распространение задержки |
|
|
Среднеквадратическое отклонение случайной переменной X |
|
|
Дисперсия случайной переменной X |
|
|
Ширина импульса |
|
|
Сдвиг во времени (независимая переменная автокорреляционной функции) |
|
|
Базисная функция |
|
|
Спектральная плотность энергии сигнала x(t) |
|
|
Угловая частота (радиан в секунду) |