В последние годы усиленно разрабатывается и внедряется система фазовой манипуляции. Эта система манипуляции является оптимальной когерентной системой передачи двоичных сигналов. По сравнению с ЧМ, применение ФМ обеспечивает при одинаковой помехоустойчивости примерно двукратный выигрыш по мощности и такой же выигрыш по полосе частот, занимаемой сигналом. В двоичных системах ФМ разность фаз манипулированных сигналов выбирается равной 180°.
Поскольку при ФМ необходимо получать информацию о фазе принимаемого сигнала, то здесь обязательно используется метод когерентного приема. На рис. 8.3 приведена структурная схема приемника ФМ, состоящая из полосового фильтра Ф, опорного гетеродина Г, частота и фаза колебаний которого полностью совпадают с частотой и фазой одного из сигналов, фазового детектора ФД, выполняющего роль перемножителя, фильтра нижних частот ФНЧ и решающего устройства РУ. Если напряжения сигналов и колебания гетеродина определяются выражениями:
 (8.4)
(8.4)

Рис. 8.3. Структурная схема приемника ФМ сигналoв
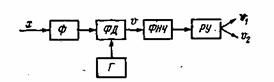
Рис. 8.4. Векторная диаграмма сигналов ФМ и помехи
![]() и
и ![]() то низкочастотное напряжение на выходе ФД будет равно:
то низкочастотное напряжение на выходе ФД будет равно:
 (8.5)
(8.5)
где k — коэффициент передачи детектора. Таким образом, знак выходного напряжения определяется фазой принятого сигнала.
Под воздействием помехи полярность v может изменяться на противоположную, что вызовет ошибку. Очевидно, это произойдет в том случае, если помеха изменит фазу результирующего колебания относительно ее номинального значения на угол, лежащий в интервале от ![]() до
до ![]() (рис. 8.4). Иными словами, сигнал s1 будет принят ошибочно, если результирующий вектор X попадет в нижнюю полуплоскость, расположенную под прямой cod. Соответственно сигнал s2 будет искажен при попадании вектора X в верхнюю полуплоскость, расположенную над прямой cod.
(рис. 8.4). Иными словами, сигнал s1 будет принят ошибочно, если результирующий вектор X попадет в нижнюю полуплоскость, расположенную под прямой cod. Соответственно сигнал s2 будет искажен при попадании вектора X в верхнюю полуплоскость, расположенную над прямой cod.
Если в схеме рис.8.3 заменить ФНЧ на интегратор, то она будет совпадать со схемой, оптимального приема двоичных сигналов (рис. 6.5). Действительно, показанный на рис.5.5 генератор разности сигналов Δs вырабатывает колебание, пропорциональное uг(t):
![]() (8.6)
(8.6)
Отсюда следует, что помехоустойчивость приемника ФМ с интегратором равна потенциальной помехоустойчивости. В системе ФМ применяются противоположные сигналы ![]() для которых коэффициент взаимной корреляции
для которых коэффициент взаимной корреляции ![]() =-1 (см.5.52). Вероятность ошибки в этом случае определяется на основании выражения: (5.53):
=-1 (см.5.52). Вероятность ошибки в этом случае определяется на основании выражения: (5.53):
![]() (8-7)
(8-7)
Как известно, при оптимальном приеме сигналов ФМ в присутствии гауссовых помех предварительная фильтрация сигналов до фазового детектора не является обязательной, однако в реальных приемниках для уменьшения влияния помех других видов обычно используют, как показано на рис.8.3, полосовые фильтры Ф с полосой пропускания ![]()
Если вместо интегратора применяется ФНЧ, полоса пропускания которого выбирается примерно равной ![]() , то это эквивалентно тому, что шумовая полоса до фазового детектора
, то это эквивалентно тому, что шумовая полоса до фазового детектора ![]() .В этом случае отношение q определяется выражением(8.2), а вероятность ошибки— ф-лой (8.7), где вместо
.В этом случае отношение q определяется выражением(8.2), а вероятность ошибки— ф-лой (8.7), где вместо ![]() подставляется q.
подставляется q.
В условиях рэлеевских замираний помехоустойчивость схемы ФМ с интегратором характеризуется вероятностью ошибки, которая находится по ф-ле (5.80), если в последней положить ![]()
 (8.8)
(8.8)
В случае применения Ф,НЧ ![]() .
.
Для обеспечения нормальной работы приемника ФМ фаза колебания гетеродина должна с высокой точностью совпадать с фазой одного из сигналов. Из выражения (8.5) легко определить, что при наличии фазовой расстройки ![]() напряжение
напряжение ![]() уменьшается пропорционально
уменьшается пропорционально ![]() . Например, если
. Например, если ![]() то
то ![]() и отношение сигнала к помехе
и отношение сигнала к помехе
по мощности падает в два раза, т. е. полностью теряется выигрыш по сравнению с ЧМ. Этим объясняются жесткие требования, предъявляемые к работе гетеродина. В системах ФМ колебания гетеродина иногда синхронизируются специально передаваемым сигналом. Однако такой путь ведет к дополнительным затратам мощности, и ФМ также частично теряет свои преимущества. Другой путь заключается в том, что для целей синхронизации используется сам принимаемый сигнал. Однако при равновероятных сигналах ![]() (t) и sz(t) невозможно установить, фазу какого сигнала следует принять в качестве опорной. Это приводит к тому, что фаза когерентного напряжения фг имеет два номинальных состояния: 0 .и 180°. В результате воздействия помех в канале система синхронизации % может переходить случайным образом из одного состояния в другое. Как следует из (8.5), скачок фазы на 180° изменяет знак выходного напряжения и. Появляется так называемая «обратная» работа (положительные посылки изменяются на отрицательные и наоборот). Этот недостаток устраняется в системах относительной фазовой манипуляции (ОФМ), впервые предложенных Н. Т. Петровичем.
(t) и sz(t) невозможно установить, фазу какого сигнала следует принять в качестве опорной. Это приводит к тому, что фаза когерентного напряжения фг имеет два номинальных состояния: 0 .и 180°. В результате воздействия помех в канале система синхронизации % может переходить случайным образом из одного состояния в другое. Как следует из (8.5), скачок фазы на 180° изменяет знак выходного напряжения и. Появляется так называемая «обратная» работа (положительные посылки изменяются на отрицательные и наоборот). Этот недостаток устраняется в системах относительной фазовой манипуляции (ОФМ), впервые предложенных Н. Т. Петровичем.
B системах ОФМ информация передается не абсолютным, а относительным значением фазы, которое вычисляется как разность фаз между передаваемым в данный момент и предыдущим сигналами ![]() . Поэтому такой способ фазовой манипуляции называют также фазоразностной манипуляцией (ФРМ). При передаче положительной .посылки фазы передаваемого и 'предыдущего сигналов совпадают, т. е. Δφ=0°, а в случае отрицательной посылки разность фаз Δφ =180°.
. Поэтому такой способ фазовой манипуляции называют также фазоразностной манипуляцией (ФРМ). При передаче положительной .посылки фазы передаваемого и 'предыдущего сигналов совпадают, т. е. Δφ=0°, а в случае отрицательной посылки разность фаз Δφ =180°.
Существует несколько методов детектирования сигналов ОФМ. Простейшим из них является автокорреляционный метод (метод сравнения фаз), который реализуется структурной схемой, приведенной на рис. 8.5. В фазовом детекторе производится сравнение фаз передаваемого сигналя s(t) и предыдущего сигнала ![]() , где
, где ![]() — длительность элементарного сигнала. Запаздывающий сигнал
— длительность элементарного сигнала. Запаздывающий сигнал ![]() образуется на выходе цепи задержки, которая рассчитана на время задержки
образуется на выходе цепи задержки, которая рассчитана на время задержки ![]() .
.
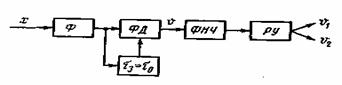
Рис. 8.5. Структурная схема автокорреляционного приемника сигналов ОФМ
Напряжение v ,на выходе фазового детектора автокорреляционного приемника ОФМ определяется выражением, аналогичным (8,5) для ФМ, с тем лишь отличием, что вместо paзности фаз ![]() подставляется разность фаз двух соседних сигналов
подставляется разность фаз двух соседних сигналов ![]() Так как здесь в качестве опорного напряжения используется непосредственно принимаемый сигнал, то появление «обратной работы» принципиально исключается. Анализ показывает, что гари воздействии флуктуационных помех вероятность ошибки при автокорреляционном методе приема равная
Так как здесь в качестве опорного напряжения используется непосредственно принимаемый сигнал, то появление «обратной работы» принципиально исключается. Анализ показывает, что гари воздействии флуктуационных помех вероятность ошибки при автокорреляционном методе приема равная
![]() (8.9)
(8.9)
где q определяется выражением (8.2), в которым ![]() — полоса пропускания фильтра Ф ,(рис.8.5). Здесь так же, как и в системе ЧМ, возможно повышение помехоустойчивости путем применения согласованного фильтра. При этом вероятность ошибки
— полоса пропускания фильтра Ф ,(рис.8.5). Здесь так же, как и в системе ЧМ, возможно повышение помехоустойчивости путем применения согласованного фильтра. При этом вероятность ошибки
![]() (8.10)
(8.10)
Автокорреляционный метод приема сигналов ОФМ позволяет получить двукратный выигрыш по мощности по сравнению с системой ЧМ, что следует из ф-л (6.71), (8.9) и (8.10).
Нетрудно заметить, что при автокорреляционном приеме сведения о начальной фазе сигнала не используются. Для сохранения номинальных значений ![]() , 180° необходимо только, чтобы линия задержки обеспечивала фазовый сдвиг сигнала, кратный 2
, 180° необходимо только, чтобы линия задержки обеспечивала фазовый сдвиг сигнала, кратный 2![]() .
.
Структурная схема корреляционного приемника сигналов ОФМ приведена на рис. 8.6.
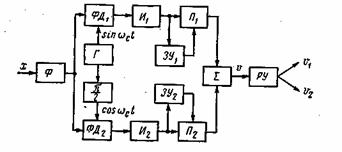
Рис. 8.6. Структурная схема корреляционного приемника сигналов ОФМ
Принимаемый сигнал s(t) = Usin(![]() )сравнивается по фазе с колебаниями опорного гетеродина sin
)сравнивается по фазе с колебаниями опорного гетеродина sin![]() и cos
и cos![]() Полученные на выходе ФД
Полученные на выходе ФД![]() и ФД
и ФД![]() напряжения Ucos
напряжения Ucos![]() и Usin
и Usin![]() интегрируются на интервале то, запоминаются в запоминающих устройствах ЗУ1 и ЗУ2, а затем через интервал
интегрируются на интервале то, запоминаются в запоминающих устройствах ЗУ1 и ЗУ2, а затем через интервал ![]() -перемножаются с последующими отсчетами напряжения на интеграторах в перемножителях П1 и П2. Напряжение на выходе сумматора после приема i-гo сигнала равно:
-перемножаются с последующими отсчетами напряжения на интеграторах в перемножителях П1 и П2. Напряжение на выходе сумматора после приема i-гo сигнала равно:

Отсюда следует, что знак выходного напряжения определяется разностью фаз передаваемого и предыдущего сигналов.
Корреляционный метод приема обеспечивает помехоустойчивость в отношении флуктуационных помех такую же, как и автокорреляционный при использовании согласованного фильтра дофазового детектора. Вероятность ошибки находится из (8.10).
Здесь, так же как и в случае автокорреляционного приема, знание начальной фазы сигнала не является обязательным; однако требуется, чтобы частота колебаний опорного гетеродина точно совпадала с частотой сигнала ![]()
Рассмотрим теперь когерентный метод приема (метод сравнения полярностей). Он заключается в том, что принятый сигнал сначала детектируется так же, как и три ФМ,
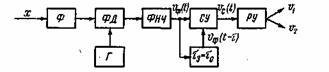
Рис. 8.7. Структурная схема когерентного приемника сигналов ОФМ
а затем поступает в схему сравнения. При этом сравниваются уже не фазы, а полярности посылок, полученных на выходе ФД. Структурная схема такого приемника показана на рис.8.7. Для сравнения полярностей посылок используются цепь задержки и сравнивающее устройство СУ, на выходе которого образуется положительное напряжение, если предыдущая и настоящая посылки имеют одинаковую полярность, и отрицательное напряжение, когда полярности соседних посылок различные.
Иными словами, если посылки разных полярностей обозначить через 0 и 1, то сравнивающее устройство можно расценивать как сумматор по модулю два.
В рассматриваемой схеме колебания гетеродина Г синхронизируются по фазе принимаемым сигналом при помощи системы синхронизации.
Таблица 8.1
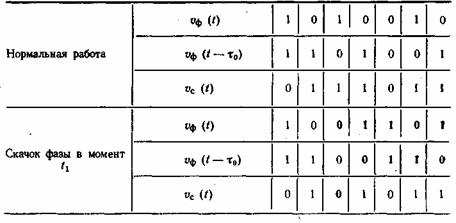
Здесь фаза колебаний гетеродина также неоднозначна и имеет два устойчивых состояния 0 и 180°, однако, в отличие от схемы ФМ, переход фазы под воздействием помех из одного состояния в другое не приводит к обратной работе. Для пояснения указанной особенности в табл. 8.1. записаны последовательности посылок ![]() и
и ![]() поступающих в сравнивающее устройство, я результат сравнения на его выходе vc(t). Сначала рассматривается случай, когда гетеродин работает нормально без скачков фазы. Затем приведены те же последовательности при скачке фазы колебаний гетеродина в момент времени t
поступающих в сравнивающее устройство, я результат сравнения на его выходе vc(t). Сначала рассматривается случай, когда гетеродин работает нормально без скачков фазы. Затем приведены те же последовательности при скачке фазы колебаний гетеродина в момент времени t![]() .
.
Скачок фазы вызывает изменение полярности посылок на выходе фильтра нижних частот ![]() но так как через интервал то меняется и знак посылок
но так как через интервал то меняется и знак посылок ![]() то результат сравнения vc(t), за исключением одной посылки, оказывается правильным.
то результат сравнения vc(t), за исключением одной посылки, оказывается правильным.
Определим теперь вероятность ошибки t![]() при когерентном приеме сигналов OФM, пренебрегая одиночными ошибками за счет скачка фазы колебаний гетеродина. Поскольку результат сравнения зависит от полярности двух соседних посылок на выходе ФНЧ, то ошибка будет иметь место, если предыдущая посылка принята ошибочно, а настоящая правильно или, наоборот, предыдущая — правильно, а настоящая — ошибочно. Вероятность каждого из этих событий, если ошибки следуют независимо, очевидно, равна произведению
при когерентном приеме сигналов OФM, пренебрегая одиночными ошибками за счет скачка фазы колебаний гетеродина. Поскольку результат сравнения зависит от полярности двух соседних посылок на выходе ФНЧ, то ошибка будет иметь место, если предыдущая посылка принята ошибочно, а настоящая правильно или, наоборот, предыдущая — правильно, а настоящая — ошибочно. Вероятность каждого из этих событий, если ошибки следуют независимо, очевидно, равна произведению ![]() где
где ![]() — вероятность ошибки в посылках на выходе ФНЧ, а суммарная вероятность ошибок на выходе сравнивающего устройства
— вероятность ошибки в посылках на выходе ФНЧ, а суммарная вероятность ошибок на выходе сравнивающего устройства
![]() (8.11)
(8.11)
Легко понять, что появление ошибок в обеих сравниваемых посылках не дает ошибочного результата, так как эти ошибки взаимно компенсируются.
Из рассмотрения схем на рис.8.3 .и 8.7 видно, что величина ![]() совпадает с вероятностью ошибки при приеме сигналов ФМ. Отсюда, подставляя выражение (8.7) в ф-лу (8.11), получим вероятность ошибки при когерентном приеме сигналов ОФМ
совпадает с вероятностью ошибки при приеме сигналов ФМ. Отсюда, подставляя выражение (8.7) в ф-лу (8.11), получим вероятность ошибки при когерентном приеме сигналов ОФМ
![]() (8.12)
(8.12)
где q — та же величина, что и в системе ФМ.
Если вместо ФНЧ используется интегратор, то в ф-ле (8.12) q=q0.
В заключение необходимо отметить, что относительные методы приема могут с успехом использоваться не только в системах фазовой манипуляции, но также и в случае амплитудной и частотной манипуляций. Особенно эффективно их применение в каналах: с замираниями, где абсолютные значения модулируемых параметров сигнала подвергаются случайным изменениям. Это объясняется тем, что для относительных методов важны, не абсолютные значения параметров, а их различие в соседних элементах сигнала.
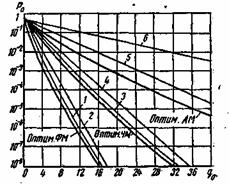
Рис. 8.8. Зависимость вероятности ошибки от отношения сигнала к помехе для различных систем манипуляции
При достаточно малой длительности элементарных сигналов по сравнению с интервалом корреляции замираний эти различия определяются в основном манипуляцией и слабо зависят от замираний.
Для сравнительной оценки помехоустойчивости различных систем манипуляции на рис.8.8 приведены графики, отражающие зависимость вероятности ошибки ![]() от
от ![]() Жирными линиями проведены кривые, рассчитанные по ф-ле (5.53), которая соответствует потенциальной помехоустойчивости при оптимальном приеме ФМ, ЧМ и AM. Остальные кривые характеризуют следующие виды приема: 1 — когерентный метод ОФМ с интегратором по нч, 2 — автокорреляционный метод ОФМ с согласованным фильтром по вч и корреляционный метод ОФМ, 3 — когерентный метод ОФМ с ФНЧ(
Жирными линиями проведены кривые, рассчитанные по ф-ле (5.53), которая соответствует потенциальной помехоустойчивости при оптимальном приеме ФМ, ЧМ и AM. Остальные кривые характеризуют следующие виды приема: 1 — когерентный метод ОФМ с интегратором по нч, 2 — автокорреляционный метод ОФМ с согласованным фильтром по вч и корреляционный метод ОФМ, 3 — когерентный метод ОФМ с ФНЧ(![]() )- автокорреляционный метод ОФМ с полосовым фильтром по вч (
)- автокорреляционный метод ОФМ с полосовым фильтром по вч (![]() ) ЧМ с согласованными фильтрами по вч, 5 — ЧМ с полосовыми фильтрами по вч (
) ЧМ с согласованными фильтрами по вч, 5 — ЧМ с полосовыми фильтрами по вч (![]() ) и 6 — AM. с полосовыми фильтрами по вч(
) и 6 — AM. с полосовыми фильтрами по вч(![]() )
)
Наилучшей помехоустойчивостью обладает система ФМ. Помехоустойчивость систем ОФМ близка к помехоустойчивости ФМ. При этом корреляционный и автокорреляционный методы приема несколько уступают когерентному; далее следуют системы ЧМ, и замыкает ряд система AM, которая имеет наиболее низкую помехоустойчивость.