3.1. Интерфейсы систем управления
3.2. Организация параллельного интерфейса
3.3. Организация последовательного интерфейса
3.4. БИС задания времени (таймер)
3.1. Интерфейсы систем управления
Одним из определяющих моментов в проектировании систем управления с использованием СВТ является выбор совокупности унифицированных аппаратных, программных и конструктивных средств, необходимых для реализации алгоритмов взаимодействия разнообразных функциональных устройств, иначе говоря, выбор интерфейса или в общем случае совокупности интерфейсов для конкретной системы.
По функциональному назначению интерфейсы делятся на магистральные (внутримашинные), внешние интерфейсы периферийных устройств, системные (интерфейсы локальных сетей).
Наибольший интерес представляют внешние интерфейсы периферийных устройств, которые обеспечивают связь датчиков информации, исполнительных органов, территориально отдаленных от процессора на десятки или сотни метров. В таких интерфейсах используется как параллельный, так и последовательный способы обмена информацией.
Основные технические характеристики интерфейсов периферийных устройств, которые широко применяются, приведены в табл. 3.1.
КОП - многомагистральный канал общего поль-зования обеспечивает соединение программируемых и непрограммируемых электронных измерительных устройств, которые применяются в лабораторных или цеховых условиях. Схема включения и структура КОП приведена на рис.3.1.
Устройство А способно управлять передачей, передавать и принимать информацию, В - передавать и принимать информацию, С - только передавать или только принимать информацию. MD, МС, МУ - соответственно магистрали данных (восьмиразрядные), синхронизации и управления.
Примерами наиболее распространенных последовательных интерфейсов периферийных устройств могут служить интерфейсы RS-232C, RS-423, RS-422. В основе интерфейсов RS-232C, RS-423 лежит одноведущая несогласованная линия, по которой информация передается двуполярными посылками.
В одноведущей линии для передачи сигнала используется один провод, напряжение на котором сравнивается с напряжением приемника линии общей шины.
Этот способ построения линии наиболее простой, но имеет существенный недостаток: на информационный сигнал накладываются помехи в линии, которые в свою очередь обуславливают ограничение длины линии и скорость передачи. Например, в интерфейсе RS-423 при скорости передачи информации 3 кбод длина линии всего лишь 12м. Интерфейс RS-422 применяется на симметричных дифференциальных линиях (витая пара, радиочастотный кабель), которые имеют более высокие характеристики, чем одноведущие. В частности, по линии интерфейса RS-422 возможна передача информации со скоростью до 100 кбод на расстояние до 1000 м, а при скорости 10 Мбод - до 12 м.
Таблица 3.1 - Типы интерфейсов
|
Технические характеристики |
Интерфейс |
||||
|
КОП |
RS232 |
RS423 |
RS422 |
MIL-STD1553 |
|
|
Скорость передачи информации |
8*10 |
20 |
300 |
10000 |
125 |
|
Длина магистрали (м) |
20 |
15 |
600 |
1200 |
100 |
|
Кол-во линий интерфейса |
16 |
1 |
1 |
2 |
2 |
|
Способ обмена информацией |
пара-лель-й |
после-дов-й |
после-дов - й |
после-дов-й |
последов-й |
|
Режим обмена |
полу-дуп-лекс |
симп-лекс |
симп-лекс |
симп-лекс, полу-дуп-лекс |
симплекс, полудуплекс, мульти- плексор |
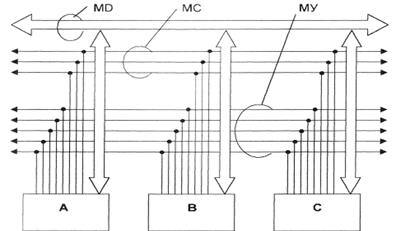
Рисунок 3.1. Структура КОП
Рассмотренные интерфейсы разрешают организовать обмен информацией в симплексном, полудуплексном, дуплексном и мультиплексном режимах. Для случая связи двух абонентов в симплексном режиме только один из двух абонентов может инициировать в любой момент времени передачу информации по интерфейсу (рис. 3.2а).
Для случая связи абонентов в полудуплексном режиме любой абонент может начать передачу информации второму, если линия связи интерфейса при этом оказывается свободной (рис. 3.2б).
Для случая связи абонентов в дуплексном режиме каждый абонент может начать передачу информации другому в произвольный момент времени (рис. 3.2в).
Для случая абонентов в мультиплексном режиме в произвольный момент времени связь может быть осуществлена между парой абонентов в любом, но одном направлении от одного из абонентов к другому (рис. 3.2г).
При организации интерфейса с внешними устройствами иногда необходимо обеспечение совместимости уровней сигналов. При этом используются технические средства - преобразователи уровней. В составе схем малой и средней степени интеграции ТТЛ-, ЕЗЛ-, КМДН-типа есть специально разработанные преобразователи уровней. Среди них можно выделить преобразователи ЕЗЛ-ТТЛ (К500ПУ125), ЕЗЛ-ТТЛ (К500ПУ124), КМДН-ТТЛ (176ПУ1, 176ПУ2, 176ПУЗ, 564ПУ4, 564ЛН1, 564ЛН2), КМДН- ТТЛ (К155ЛНЗ, К155ЛН5) и др. В случае, если необходимо разработать специальный преобразователь, можно воспользоваться одной из следующих схем:
- делитель напряжения;
- фиксаторы уровней;
- устройства, сдвигающие уровни;
- ключевые транзисторные схемы;
- схемы, работающие на принципе переключения тока;
- оптронные переключатели;
- трансформаторные схемы.
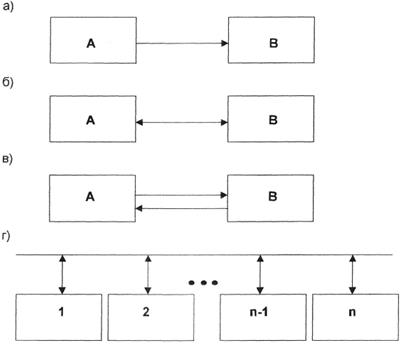
Рисунок 3.2. Режим обмена информацией
а) симплексный; б) полудуплексный; в) дуплексный; г) мультиплексный.
Делители напряжения применяют для преобразования высоких уровней напряжения в низкие. На рис. 3.3 приведен пример соединения схемы КМДН-типа, которые работают с низким уровнем напряжения источника питания. Для схемы можно рекомендовать R1 = 20 кОм, R2 = 10 кОм.
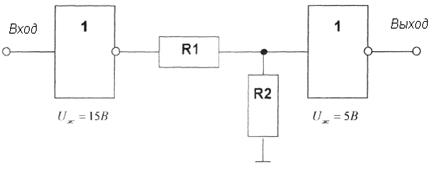
Рисунок 3.3. Преобразователь высокого уровня напряжения в низкий
На рис.3.4. приведен пример схемы преобразователя уровней на основе схемы фиксатора потенциалов. Необходимо преобразовать высокий потенциал 27В в уровень, необходимый для работы схемы КМДН-типа,
напряжением питания +5В. При разомкнутом ключе уровень ![]() обеспечивается резистором R2. При запертом ключе на выходе схемы будет действовать потенциал, равный
обеспечивается резистором R2. При запертом ключе на выходе схемы будет действовать потенциал, равный ![]() . Выбираем R1 = 10 кОм, а R2 = 10 кОм.
. Выбираем R1 = 10 кОм, а R2 = 10 кОм.
На рис.3.5. приведена схема, преобразующая сигнал низкоомного датчика от уровней напряжения +5В и + 4,1В до уровней -0.7, -1,6 В для стандартного элемента ЕЗЛ-типа. Очевидно, что напряжение пробоя стабилитрона равно 5.7В. Задаваясь током, который проходит через стабилитрон, равным 5мА (при условии, что такой ток обеспечивает исходная цепь датчика), определим
![]()
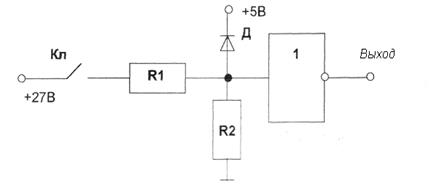
Рисунок 3.4. Преобразователи уровней на основе схемы фиксатора потенциалов
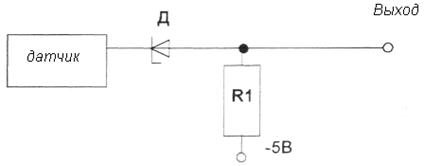
Рисунок 3.5. Схема сдвига уровней
Схемы, работающие на принципе переключения тока, используются в качестве преобразователей уровней в случаях, когда логический перепад может составлять доли вольта.
На рис. 3.6 приведена схема преобразователя уровня +1,5В, +1,0В в уровни схем ТТЛ-типа. Для схемы можно рекомендовать R1 = 1,5 кОм, R2 = 0,68 кОм, R3 = 1,2 кОм, ![]() = 20мА, схема нагружена на 10 схем ТТЛ-типа.
= 20мА, схема нагружена на 10 схем ТТЛ-типа.
Оптронные переключатели используются для гальванической развязки электрических цепей при одновременном преобразовании уровней.
На рис. 3.7 приведена схема преобразователя уровней тока в уровни схем ТТЛ-типа.
На рис. 3.8 приведен пример использования схемы трансформаторного преобразователя уровней.
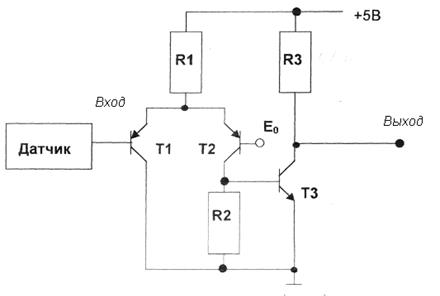
Рисунок 3.6. Преобразователь уровня
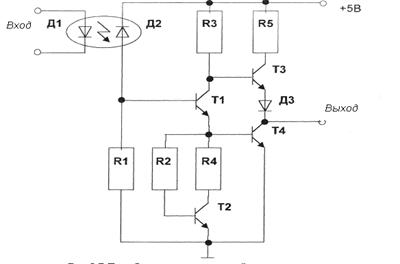
Рисунок 3.7. Преобразователь уровней тока в уровни схем ТТЛ - типа
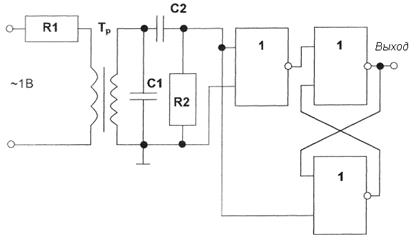
Рисунок 3.8. Схема трансформаторного преобразователя уровней
3.2. Организация параллельного интерфейса
В системах управления для реализации интерфейса микропроцессорной системы с периферийными устройствами в качестве устройства ввода-вывода используется БИС KP580BB55, которая представляет собой универсальную, программируемую БИC, с помощью которой возможна организация синхронного и асинхронного обмена в параллельном формате практически с любым несерийным оборудованием. В состав БИC (рис. 3.9) входят три восьмиразрядных канала PA, PB, PC, схема управления с регистром управляющего слова (РУС).
Обмен информацией между каналами ввода-вывода и шиной данных МП системы осуществляется через двунаправленную шину данных DO-D7. Управляющими сигналами являются: RD, WR, CS, а также АО и А1, которые определяют адрес канала ввода-вывода (табл. 3.2).
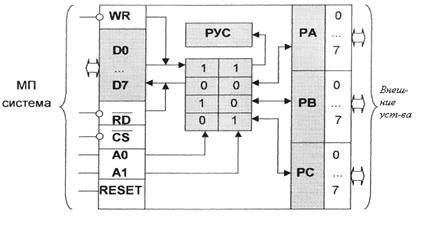
Рисунок 3.9. Структура БИС КР580ВВ55
Таблица 3.2 - Назначение сигналов БИС КР580ВВ55
|
Назначение |
Наименование |
Примечание |
|
CS |
Выбор микросхемы |
При CS=0 – разре-шение работы БИС. При CS=1- D0-D7 в третьем состоянии |
|
RD |
Чтение |
Чтение данных с БИС на шину данных |
|
WR |
Запись |
Запись данных на БИС |
|
RESET |
Сброс |
При RESET=1 – все регистры обнуляют-ся и все каналы переводятся в режим ввода |
|
А1, А0 |
Адреса канала |
00 DO-D7 ¬®PA 10 DO-D7 ¬®PB 01 DO-D7 ¬®PC 11 DO-D7 ¬®PУС |
Перед началом работы или в процессе работы (при необходимости изменения режимов работы каналов) программным способом в БИС заносятся специальные команды инициализации, изменяющие режимы работы БИС, т.е. осуществляется занесение их в регистр управляющего слова (РУС). Структура управляющего слова приведена на рис. 3.10.
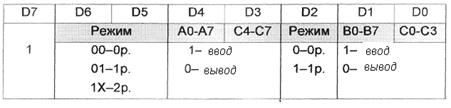
Рисунок 3.10. Структура управляющего слова
Содержимое этого слова задается одним из трех возможных режимов работы каналов ввода-вывода:
- режим 0 - основной;
- режим 1 - стробирующий однонаправленный;
- режим 2 - стробирующий двунаправленный.
Управляющее слово засылается командой OUT из аккумулятора МП в РУС.
Режим 0
В этом режиме по сигналу, который подается на вход RD/WR, данные читаются / записываются из периферии / в периферию через канал, который выбирается с помощью сигналов на входах АО, А1. Информация сохраняется на выходе канала до записи новой информации в данный канал.
Режим 1
В этом режиме осуществляется асинхронный обмен информацией между портом и периферией через каналы РА и РВ. Канал PC используется для передачи управляющих сигналов.
Режим 2
В этом режиме БИС имеет один двунаправленный канал РА, а пять разрядов канала PC используются как управляющие.
Рассмотрим, как осуществляется подключение БИС KP580BB55 к шинам МП и внешним устройствам.
На рис. 3.11 приведена схема включения БИС для возбуждения светодиодов и ввода информации посредством интегральных ключей. Это типичный пример электрической схемы для понимания основных принципов использования БИС и решения сложных проблем организации интерфейса.
Для выбора устройства используются адресные линии А7..А2. В примере адрес порта -FO. Если на адресных линиях А7 - А4 установлена логическая 1, а разряды адреса A3 и А2 равны логическому 0, то это соответствует режиму выбора микросхемы. Адресные выходы А1 и АО микропроцессора соединяются непосредственно со входами А1 и АО БИС. Логическая комбинация сигналов на этих входах определяет внутренний порт, с которым осуществляется связь: PA, PB, PC, РУС. Выводы системной шины данных МП соединяются непосредственно со входами D0-D7 БИС (двунаправленное буферирование шины данных не используется).
Активный уровень сигнала RESET (логическая 1) устанавливает БИС в начальное состояние, при котором все каналы переводятся в режим ввода, а регистры переводятся в состояние логического 0.
Выводы микросхемы PAО, PA1, РА2, РСО и РС1 соединяются со светодиодами. Если на указанных выше выводах устанавливается сигнал низкого уровня путем записи логического 0, то это передается через разряды шины данных в канал РА или PC и соответствующие светодиоды включаются. Канал РВ соединен с электронными ключами, на основе которых строятся логические элементы (ЛЭ). Таким образом, БИС имеет следующую конфигурацию: каналы РА и PC настроены на вывод, а РВ - на ввод информации.
Программа управления БИС должна выполнять простые задачи:
- запись управляющего слова для задания конфигурации БИС;
- введение управляющего слова в канал РВ;
- запись слова в канал РА;
- вывод управляющего слова из канала РВ;
- запись слова в канал PC.
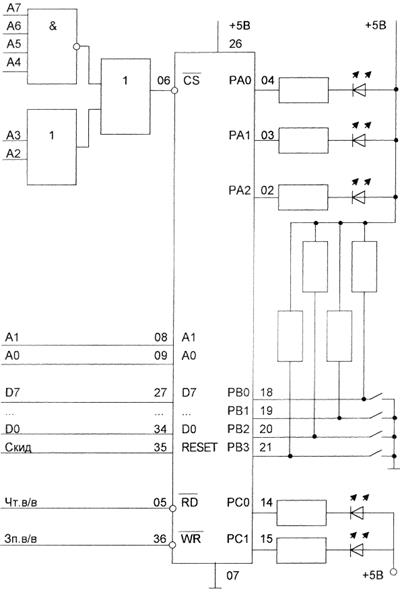
Рисунок 3.11. Схема включения БИС
Согласно формату управляющего слова (рис. 3.10) для решения любой задачи необходимая конфигурации БИС может быть представлена рис. 3.12.
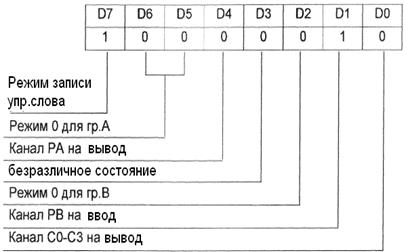
Рисунок 3.12. Управляющее слово БИС
Так как адрес БИС - FO, то адреса внутренних каналов имеют обозначения: PA = FO; PB = F1; PC = F2; PYC = F3. Программа инициализации БИС и обслуживания периферийных устройств на Ассемблере для МП580 имеет вид
MVI А, 82Н
OUT OF3H ; запись управляющего слова
BACK: IN OF1Н ; введение слова из канала РВ
OUT OFOH ; вывод слова в канал РА
СМА ; дополнение слова из канала РВ
OUT OF2H ; вывод слова в канал PC
JMP BACK ; возвращение к началу цикла
Изменить конфигурацию БИС можно с помощью записи нового управляющего слова в канал управления.
3.3. Организация последовательного интерфейса
Последовательный интерфейс характеризуется тем, что передача информации происходит по одной линии связи, причем биты, которые составляют слово, передаются один за одним. Обычная скорость передачи данных составляет:
- 110 и 300 бит/с для телетайпа;
- 1200; 2400; 4800; 9600 бит/с - для ЭВМ.
Рассмотрим, как осуществляется прием и распознавание данных, которые передаются. Предположим, что передается комбинация 10110001.
В начале сеанса передаётся младший разряд DO. Предположим, что линия связи при отсутствии передачи находилась в состоянии логической 1. Если младшие разряды D0 и D1 равны 1, то момент начала передачи данных будет пропущен. Поэтому к слову, которое передается, прибавляются стартовые биты, которые информируют принимающее устройство о начале передачи. Состояние стартового бита противоположно состоянию линии в режиме ожидания.
Кроме стартового бита к информации, которая передается кодовой комбинацией, прибавляются:
- бит паритета контроля правильности приема;
- стоповый бит для обозначения окончания передачи.
Полное цифровое слово представлено на рис. 3.13.
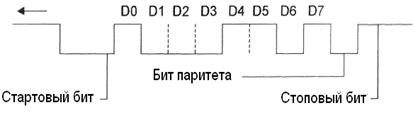
Рисунок 3.13. Передача цифрового слова
Для организации последовательных линий связи разработана специальная интегральная микросхема КР580ВВ51, её полное название универсальный синхронно-асинхронный приемо-передатчик (УСАПП).
Структурная схема КР580ВВ51 приведена на рис. 3.14.
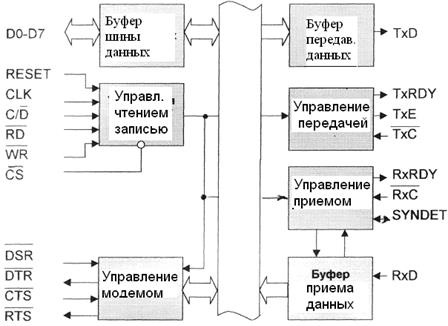
Рисунок 3.14. Структура БИС КР580ВВ51
![]() - управление/данные. Если сигнал равен 1, то записывается управляющее слово или словосостояние, если -0, то записываются или читаются данные.
- управление/данные. Если сигнал равен 1, то записывается управляющее слово или словосостояние, если -0, то записываются или читаются данные.
![]() - вх. готовность модема.
- вх. готовность модема.
![]() - вых. готовность приёма информации.
- вых. готовность приёма информации.
![]() - вх. разрешение передачи информации.
- вх. разрешение передачи информации.
![]() - вых. готовность передачи информации.
- вых. готовность передачи информации.
TxD - вых. линия микросхемы.
TxRDY - готовность блока к записи кода по шине данных.
ТхE - окончание выдачи кода из регистра блока при «1»; запись кода в блок регистра при «0».
![]() - синхронизация блока передачи.
- синхронизация блока передачи.
RxRDY - вых. готовность блока к чтению кода по шине данных.
![]() - синхронизация блока приема.
- синхронизация блока приема.
SYNDET - вых./вх.
RxD – входная линия микросхемы.
Процесс программирования БИС приведен на рис. 3.15.
При синхронной передаче существует общая линия синхросигналов для источника и приемника, импульсы служат для выделения бит в канале.
При асинхронной передаче источник отмечает начало и конец слова. Формат управляющего слова инициализации при асинхронно-синхронном и синхронном режимах обмена данными приведен на рис. 3.16.
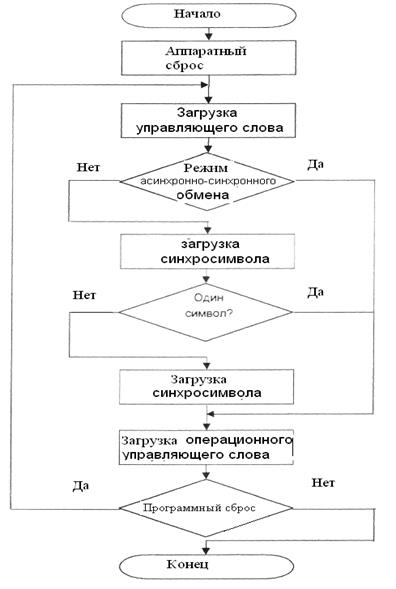
Рисунок 3.15. Алгоритм программирования БИС
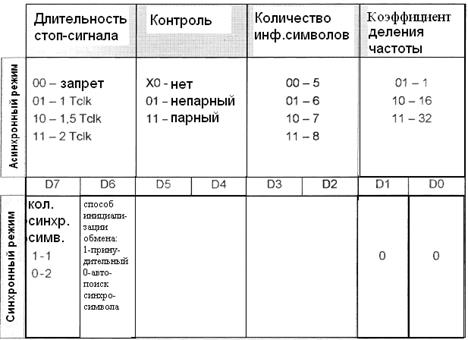
Рисунок 3.16. Формат управляющего слова
После загрузки управляющего слова загружается операцион-ное слово (рис. 3.17).
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
|
1-поиск синхро-симво-ла |
1-прог-рам- мный сброс |
1- готов-ность переда-чи |
1- сброс флагов ошибки
|
1- раз-рыв послед. ходов- пауз |
1- прием разре-шен |
1- готов. к приё- му |
1- пере- дача разре-шена |
Рис 3.17. Формат операционного слова
Пример программы УСАПП в асинхронно-синхронном режиме (режиме асинхронного обмена с дуплексным каналом связи, восемь информационных разрядов, бит контроля по парности, два стоп-бита, коэффициент деления частоты равняется 16):
DI
XRA
OUT ADDR1
OUT ADDR1
OUT ADDR1
MVI А, 40Н
OUT ADDR1; программный сброс
MVI A, OFEH ; /11111110 – управляющее слово /
OUT ADDR1
MVI A, 15H ; / 00010101 - операционное слово /
OUT ADDR1
El
RET
Пример программы УСАПП в синхронном режиме (режим синхронного приема с автопоиском синхросимвола, восемь информационных разрядов, контроль по парности, синхросимвол 10000000):
DI
XRA
OUT ADDR1
OUT ADDR1
OUT ADDR1
MVI A, 40H
OUT ADDR1; программный сброс
MVI F, OBCH ; /10111100 - управляющее слово /
OUT ADDR1
MVI A, 80H; загрузка синхросимвола
OUT ADDR1
MVI A, 94H; /10010100 - операционное слово /
OUT ADDR1
EI
RET
Схема включения УСАПП в асинхронно-синхронном режиме приведена на рис. 3.18.
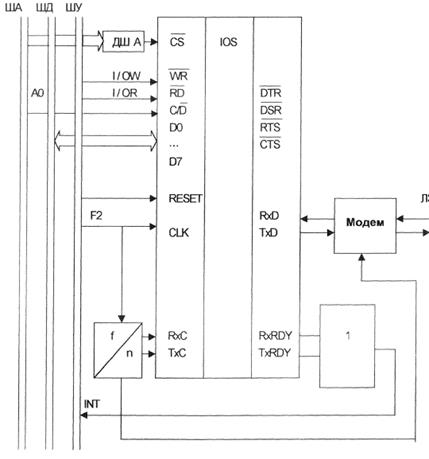
Рисунок 3.18. Схема включения БИС КР58ВВ51
3.4. БИС задания времени (таймер)
Для выполнения функций задания времени и получения программно-управляющих временных задержек в МП системах используются БИС КР580ВИ53, которые представляют собой трёхканальное программируемое устройство. БИС задания времени называют «таймер». Условное обозначение БИС приведено на рис. 3.19.
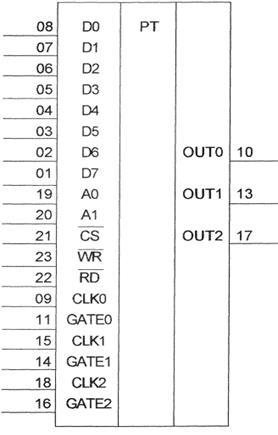
Рисунок 3.19. Структура БИС КР580ВИ53
В состав таймера входят: буфер шины данных, три канала, которые содержат в каждом канале регистр управляющего слова, схема управления каналом, буфер, 116-разрядный счетчик, работающий на вычитание.
Каждый из трех каналов программируется отдельно путем записи в регистр управляющего слова (рис.3.20).

Рисунок 3.20. Формат управляющего слова
Назначение входов:
CLK - вх. синхронизации счетчиков;
GATE - вх. управления счетчиками;
OUT - вых. сигналы счетчиков.
В зависимости от комбинаций управляющих сигналов на входах ![]() ,
, ![]() ,
, ![]() разнообразные устройства таймера подключаются к шине данных при различных сочетаниях А0 и А1.
разнообразные устройства таймера подключаются к шине данных при различных сочетаниях А0 и А1.
А0А1
0 0 - D 7-D0 -> счт.0
0 1 - D 7-D0 -> счт.1
1 0 - D 7-D0 -> счт.2
1 1 - D 7-D0 -> РУС
Управляющее слово посылается с МП по шине данных командой OUT. При этом на А0 и А1 должны быть установлены сигналы высокого уровня. Запись управляющих слов для разнообразных счетчиков можно осуществлять в любой последовательности. Вслед за управляющим словом с помощью команды OUT в счетчик таймера заносят начальное содержимое 1 или 2 байта.
Каждый из счетчиков может работать в одном из 6 режимов:
0 - программируемая задержка;
1 - программируемый ждущий мультивибратор;
2 - программируемый генератор тактовых сигналов;
3 - генератор прямоугольных сигналов;
4 - строб, который управляется программно;
5 - строб, который управляется аппаратно.
Временные диаграммы работы таймера в разных режимах приведены на рис. 3.21.
Режим 0
С момента записи числа в счетчик до окончания счета на выходе OUT сохраняется сигнал низкого уровня. После окончания счета уровень сигнала на выходе становится высоким и сохраняется до следующей загрузки счетчика. Счет возможен только при высоком уровне сигнала GATE.
Режим 1
На выходе счетчика формируется отрицательный импульс продолжительностью Tclk, причем низкий уровень на выходе устанавливается со второго такта синхросерии после поступления на вход GATE сигнала высокого уровня. Особенностью данного режима является возможность перезапуска счетчика без перезагрузки, которая необходима в режиме 0.
Режим 2
На выходе OUT каждый раз после пересчета числа, записанного в счетчик, при к=0 появляется отрицательный импульс продолжительностью в один период тактовой частоты.
Режим 3
Если n - парное, то продолжительность отри-цательных и положительных полупериодов на выходе OUT равны между собой. Если n - непарное, отрицательный полу-период исходного сигнала меньше положительного на Tclk. При n = 3 загрузка невозможна.
Режим 4
На выходе OUT появляется отрицательный импульс продолжительностью Tclk при окончании счета.
Режим 5
Отличается от режима 4 тем, что счетчик можно перезапускать.
Режимы работы таймера можно условно разбить на 3 группы:
- программируемый одновибратор (0-1);
- делитель частоты (2, 3);
- счетчик событий (4, 5).
Считывание содержимого счетчика можно осуществить двумя способами:
- с остановкой;
- без остановки.
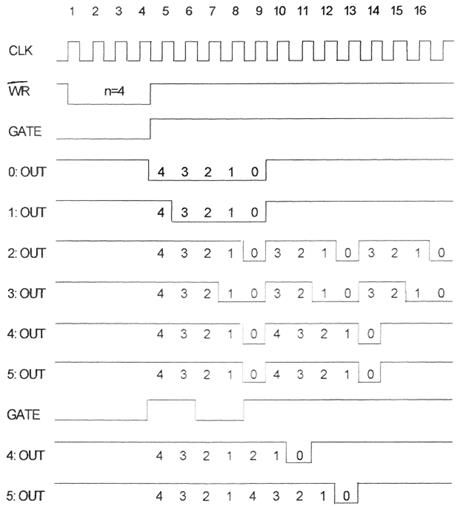
Рисунок 3.21. Режимы работы БИС
При первом способе чтение данных осуществляется командой IN после приостановки работы счетчика путем снятия сигнала GATE или блокированием тактовых сигналов.
При втором способе чтение данных осуществляется после загрузки командой OUT управляющего слова с нулями в D5 и D4, разряды D3-D0 не имеют значения. После загрузки управляющего слова содержимое читается командой IN.
Пример. Счетчики таймера могут использоваться в системе как счетчики событий, причем снятие сигнала GATE не вызывает прекращение работы счетчиков. По положительному фронту этого сигнала должна осуществиться перезагрузка счетчика. Таймер имеет адрес F0.
Программа инициализации таймера
MVI А, 1АН; запись управляющего слова
OUT OF3H ; в счетчик 0
MVI A, 5AH ;
OUT OF3H ; в счетчик 1
MVI A, 9AH ;
OUT OF3H ; в счетчик 2
MVI А, ОАН ; загрузка числа в счетчик О
OUT OFOH ;-/10/
MVI A, 64H ; загрузка числа в счетчик 1
OUT OF1H ;-/100/
MVI A, 80H ; загрузка числа в счетчик 2
OUT OF2H ;-/128/
Реализация часов реального времени приведена на рис. 3.22.
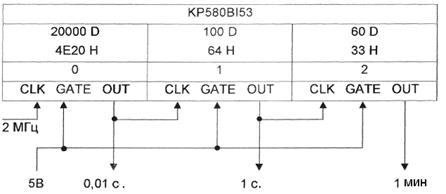
Рисунок 3.22. Часы реального времени
3.5. Организация режима прерывания
При функционировании систем управления и измерительных приборов необходимо осуществлять прерывание основной программы работы и выполнять те или иные технические действия путем выдачи соответствующих управляющих сигналов. Сигнал прекращения действия основной программы и переход к подпрограмме обслуживания прерываний называют запросом на прерывание или запросом на обслуживание. В реальных системах существуют несколько источников запроса прерывания. Если известно, что сигналы запроса поступают в разные моменты времени, то идентификация источника, переход к нужной подпрограмме и возвращение к исходной программе не представляют технических трудностей. В общем случае источники вырабатывают свои запросы на прерывания независимо друг от друга. Они могут пересекаться во времени, поэтому для установления порядка обслуживания запросов каждому из источников присваивается свой номер согласно его информационной важности, который называют уровнем приоритета. Устройство, на которое возлагаются задачи распознавания запросов и выдача соответствующих управляющих сигналов, обеспечивающих выполнение подпрограммы обслуживания, называют блоком приоритетных прерываний.
Для реализации прерываний в системах автоматики разработан программируемый контроллер приоритетных прерываний (ПКПП) КР580ВН59 (рис 3.23).
В состав БИС входят: 8 разрядный буфер данных; схема управления чтением/записью - входы CS, WR, RD, АО; регистры управляющих слов; схемы управления - вход INTA, выход INT; схема каскадирования - вход SP, входы/выходы CASQ-CAS2; регистр запросов на прерывание - входы IRQ 0-IRQ7.
Программируемый контроллер прерывания может находиться в состояниях отладки и обслуживания запросов на обмен. Используются управляющие слова двух видов: инициализации (ICW) в режиме отладки и операционные (OCW) при обслуживании запросов. Командами OUT контроллер настраивается на разнообразные режимы: полного вложения подпрограмм прерывания (приоритеты внешних устройств фиксированные); циклического сдвига приоритетов; специальной маскировки; последовательного опроса.
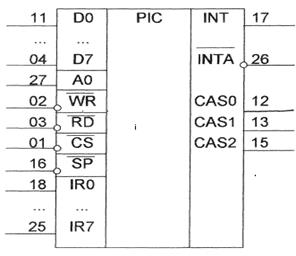
Рисунок 3.23. Условное обозначение ПКПП
ПКПП обслуживает запросы на прерывание от восьми внешних устройств, которые поступают на входы IRQ0-IRQ7. Схема управления ПКПП формирует сигнал запроса на прерывание INT. Если микропроцессору разрешены прерывания, он отвечает контроллеру сигналом INTA. По этому сигналу на шину данных выставляется первый байт команды CALL. После чего за двумя очередными сигналами, которые поступают на вход INTA, выдается второй и третий байты команды CALL, содержащие адрес подпрограммы обработки прерываний. Отладка ПКПП проходит в соответствии с алгоритмом, приведенным на рис. 3.24.
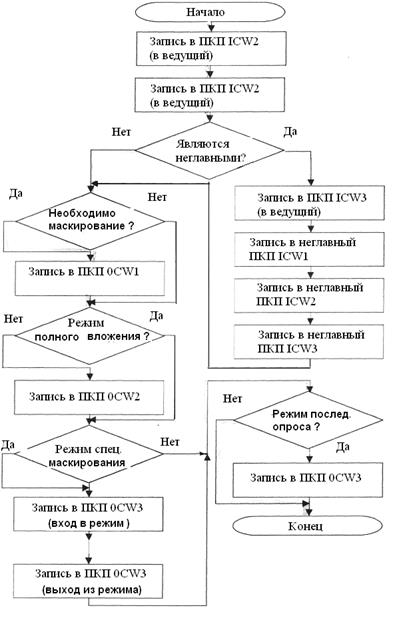
Рисунок 3.24. Алгоритм настройки ПКПП
Рассмотрим алгоритм отладки ПКПП.
По адресу А0 = 0 командой OUT загружается управляющее слово инициализации ICW1, с помощью которого задается младший байт адреса подпрограммы прерываний и наличие каскадирования. Формат управляющего слова ICW1 приведен на рис. 3.25. После этого загружается второе управляющее слово инициализации ICW2 и таким образом задается старший байт адреса (рис. 3.26).
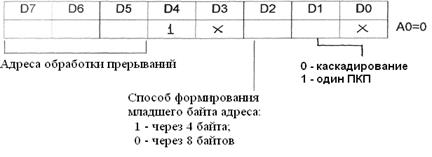
Рисунок 3.25. Формат управляющего слова ICW1
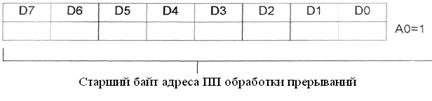
Рисунок 3.26. Формат управляющего слова ICW2
После загрузки управляющих слов инициализации ПКПП переходит в состояние обслуживания запросов на прерывание, затем в режим полного вложения подпрограмм обработки прерываний. Некоторые из выходов запросов на прерывание могут быть замаскированы. Для этого по адресу А0 =1 в ПКПП засылается OCWI - байт с единицами в разрядах, соответствующий входам, по которым запросы не должны обслуживаться. В качестве примера рассмотрим режим полного вложения подпрограмм обработки прерываний. В этом режиме приоритеты входов никогда не изменяются, они установлены таким образом, что IR0 имеет высший, а IR7- низший приоритеты. Если одновременно поступают запросы на несколько входов ПКПП, то обслуживается запрос, который поступил на вход с наибольшим приоритетом. После выполнения подпрограммы обслуживания прерываний загрузка OCW2 (рис. 3.27) регистра состояния сбрасывается и продолжается выполнение прерванной программы.
![]()
Рисунок 3.27. Завершение обслуживания запроса прерывания – переход в режим полного вложения
Пример отладки ПКПП в режиме полного вложения и фрагмент подпрограммы обслуживания прерываний имеет вид:
ПП отладка ПКПП ПП обработки прерываний
MVI А, 16 DI ; запрет прерываний
OUT F0:-ICW1
MVI A, 83 MVI А,20
OUT F1: - ICW2 OUT F0 ; обработка конца прерываний
MVI A, F0 El ; разрешение прерывания
OUT F0: - OCW1 RET ; возвращение
HIT
В подпрограммах адрес ПКПП - F0, прерывания R 7-IR4 замаскированы, т.е. не обслуживаются. Необходимо еще раз подчеркнуть, что любую подпрограмму обработки прерывания необходимо завершать загрузкой операционного слова OCW2.
3.6. Элементы защиты информации
Прохождение электрических сигналов по цепям технических средств (персонального компьютера, телефонного аппарата, факса и т.п.) и по соединительным кабелям сопровождается возникновением побочных электромагнитных излучений в окружающей среде, которые создают условия для повреждения оборудования вследствие взаимных наводок. Для устранения этих нежелательных явлений применяются специальные средства защиты информации: экранирование, фильтрация, заземление, электромагнитное зашумление. Используются также средства ослабления уровней нежелательных электромагнитных излучений и наводок с помощью разнообразных резистивных и поглощающих согласующих нагрузок.
Наиболее радикальным способом защиты аппаратуры и помещений от излучения является экранирование, которое можно выполнить из листовой стали, медной сетки или алюминиевой фольги. Желательно также иметь экранирование внутренних схем аппаратуры.
Серьезную проблему представляет защита линии связи. Наиболее экономичным способом экранирования является расположение информационных линий в экранируемых распределительных коробах. Несколько иначе приходится экранировать отдельные линии связи. Для этого используются провода в экранированной обмотке или помещают их в оболочку, например, фольгу. Эффективно применять при этом скручивание двух или трех проводов. При использовании трифиля третий провод соединяется с землей и служит экраном. Более эффективным является триаксиальный (экранированный коаксиальный) кабель. Необходимо проследить за тем, чтобы кабели разных линий связи были максимально разнесены для уменьшения взаимных наводок.
После проведения работ по экранированию необходимо выполнить работы по заземлению экранов. Это осуществляется путем параллельного подключения к существующему контуру заземления, при этом необходимо проверить его сопротивление (оно должно быть не более 4 Ом). Сопротивление заземления рассчитывается по формулам:
для металлической пластины радиусом ![]() , расположенной непосредственно у поверхности земли,
, расположенной непосредственно у поверхности земли,
![]() ,
,
где ![]() - удельное сопротивление грунта, Ом / см3;
- удельное сопротивление грунта, Ом / см3;
для вертикально вбитой трубы,
![]() ,
,
где ![]() - длина трубы, см;
- длина трубы, см;
![]() - радиус трубы, см.
- радиус трубы, см.
Исключается возможность утечки информации по цепям источников питания, если использовать сетевые фильтры, включая их между энергетической сетью и устройством потребителя. Для подавления помех в сетевых фильтрах используют два способа: фильтрация режекторными дросселями, а также экранирование сетевой и выходной обмоток трансформаторов.
Среди электронных устройств защиты информации наибольшее распространение получили генераторы шума. Они излучают активную широкополосную радиопомеху, которая влияет на входные цепи радиоприемных устройств. Аналогичные устройства используются для защиты от утечки информации по электрическим сетям и телефонным линиям.
Первые генераторы шума состояли из двух мультивибраторов, выполненных на транзисторах. Фильтрация подобных сигналов не представляет особых трудностей, поэтому используются многочастотные помехи, которые увеличивают вероятность подавления полезной информации. Необходимо применение нескольких точно налаженных фильтров в зависимости от количества использованных частот. И чем большее количество частот в помехе, тем сложнее выявить необходимую информацию. На рис. 3.28 приведена схема многочастотного генератора шума.
Практически, это RC - мультивибратор на элементах DD3.1., DD3.2., частота которого регулируется включением дополнительных резисторов R2 - R9 параллельно основному- R1. Переключение резисторов обеспечивает мультиплексор DD1 в соответствии с двоичным кодом, который поступает со счетчика DD2. Продолжительность каждого такта и скорость изменения тактов определяются быстродействием мультиплексора и частотой тактового генератора на элементах DD3.4., DD3.5., импульсы из которого поступают на вход счетчика DD2. Скорость изменения тактов может регулироваться резистором R11.
Для защиты от несанкционированного подключения к телефонной сети используются устройства кодирования линии, которые сохраняют линию "за собой". При этом все посылки вызова, которые поступают от АТС, проходят беспрепятственно, а для подключения линии необходимо подать индивидуальный код.
Схема устройства кодирования приведена на рис. 3.29.
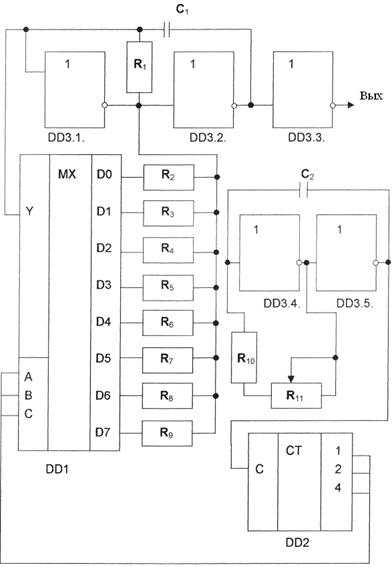
Рисунок 3.28. Многочастотный генератор
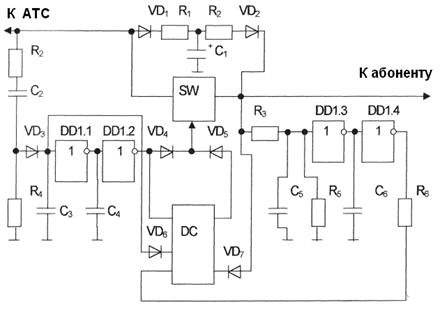
Рисунок 3.29. Схема устройства кодирования линии
Устройство реализовано на интегральных микросхемах серии 561 с микропотреблением в статическом режиме. В состав устройства входят:
- узел обработки импульсов вызова на элементах DD1.1., DD1.2.;
- узел приема кода на элементах DD1.3., DD1.4.;
- включатель абонента SW;
- дешифратор кода DC;
- узел питания на элементах VD1, R1, VD2, R2, С1.
Рассмотрим работу схемы. При снятии трубки с телефона будет отсутствовать сигнал готовности станции (425 Гц). После набора соответствующего кода и обработки его узлом приема на выходе дешифратора появится уровень логической единицы "1", который через включатель абонента SW подключит телефон к линии (если код набран правильно). Если код набран неправильно, система защиты блокируется на определенное время (десятки секунд), после чего можно повторить набор кода.
При включении ключа SW телефон работает в обычном режиме - обеспечивает набор номера и связь. Система снова входит в режим охраны после того, как трубка будет положена на аппарат.
Любой сигнал от АТС после обработки элементами DD1.1., DD1.2. с небольшой задержкой, которая определяется параметрами элементов С3, С4 с уровнями логической "1" через диод VD4 откроет ключ только на время вызова. При снятии трубки с телефонного аппарата входной узел замыкается через диод VD6, и дальше для подключения телефона необходимо снова набрать индивидуальный код.
Таким образом, система защиты блокирует подключение к телефонной линии без знания кода.
Список литературы
1. Мячев А.А., Степанов В.Н., Щербо В.К. Интерфейсы систем обработки данных: Справочник. - М.:Радио и связь, 1989.
2. Микропроцессоры /Под. ред. Л.Н. Преснухина М.:Высшая школа 1986, т.2.
3. Самофалов К.Г. и др.: Микропроцессоры. - Киев: Техника, 1986.
4. Шпионские штучки и устройства для защиты обьектов и информации: Справочное пособие: г. Лань, 1998.