1. Многоканальные радиотехнические системы передачи информации
1.1. Классификация многоканальных РТС передачи информации
1.2. Многоканальные РТС при линейном разделении каналов
1.3. Комбинационное объединение и многопозиционное кодирование сигналов в РТС
2.1. Разделение по форме сигналов в асинхронных адресных системах
3. Сигналы для РТС ПИ с разделением по форме
3.1. Классификация широкополосных сигналов
3.2. Квазиортогональные двоичные последовательности
3.3. М-последовательности и их свойства
3.4. Предпочтительные пары М-последовательностей
3.5. Максимальные связные множества М-последовательностей
3.6. Составные последовательности на основе двух и более М-последовательностей
1. Многоканальные радиотехнические системы передачи информации
1.1. Классификация многоканальных РТС передачи информации
Главнейшей чертой человечества является взаимное общение людей. Системы связи, объединенные в сети связи, являются своеобразными нервами общества. Пропускная способность и разветвленность сетей связи, интенсивность и дальность обмена сообщениями, количество услуг, предоставляемых потребителям, и т.д. в значительной мере характеризуют уровень развития той или иной страны.
Радиотехническая система (РТС) передачи информации определяется целым комплексом взаимно связанных свойств, особенностей, характеристик. К ним относятся:
- вид передаваемых сообщений и критерии их качества;
- количество обслуживаемых абонентов;
- особенности их физического размещения и конфигурация обмена сообщениями между абонентами в системе;
- виды сигналов, передаваемых в общем тракте.
Помимо означенных выше свойств РТС должны характеризоваться надежностью, живучестью, обеспечением негласности переговоров, стоимостью оборудования, видом аппаратуры (терминалов) у абонентов и т.д.
Обсудим кратко перечисленные классификационные характеристики РТС передачи информации.
Сообщения по своей форме бывают аналоговыми и цифровыми. Соответственно они характеризуются либо шириной спектра, либо скоростью передачи. Эти характеристики связаны между собой.
Качество восстановленного на приемной стороне сообщения может характеризоваться отношением С/Ш, разборчивостью речи, средней вероятностью ошибочного приема символа сообщения.
По конфигурации обмена сообщениями многоканальные системы могут быть следующих видов.
1. Связь из точки в точку. Примером такой системы может быть магистраль, соединяющая два населенных пункта (рис. 1.1а). Обобщением является магистраль радиорелейная линия, соединяющая последовательность нескольких населенных пунктов.
2. Радиальная система связи, состоящая из центральной станции ЦС и абонентских (АС) (рис. 1.1б). Передача сообщений между абонентами ведется только через центральную станцию. Абоненты могут быть “привязаны” только к терминалам или же некоторые из них к центральной станции.
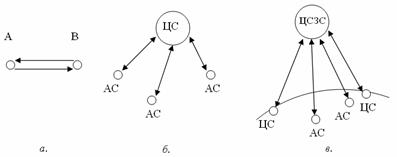
Рис. 1.1. Конфигурация обмена сообщениями между абонентами
Такой принцип объединения сигналов абонентов называется централизованным. Он используется часто при организации связи в народном хозяйстве (в строительстве, сельском хозяйстве, на предприятиях и т.д.).
3. Близко к радиальным системам подходят спутниковые системы связи с ретрансляторами сигналов, расположенными на ИСЗ. Здесь и ЦС, и абонентские терминалы находятся на земле, а в космосе – только ретранслятор (рис.1.1в). Геометрическое размещение этого ретранслятора резко расширяет возможности передачи сообщений – и по дальности, и по пропускной способности, и по качеству связи, и по доступу в самые отдаленные районы земного шара.
Примером может служить система для передачи сигналов бедствия САРСАТ – КОСПАС, где абонентскими терминалами являются аварийные буи, автоматически включающиеся в критических ситуациях.
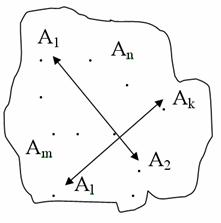
4. Система типа “каждый с каждым”. Здесь в группе абонентов устанавливается некоторая совокупность попарных связей без особой регламентации (рис. 1.2). Этот принцип объединения сигналов абонентов называется автономным /2/ и широко используется в низовой радиосвязи.
Фундаментом системы связи являются используемые сигналы и их преобразования. Важным для РТС является выделенный диапазон частот. Он определяет те искажения, которые получает радиосигнал в процессе распространения, возможную ширину спектра группового сигнала, т.е. число абонентов в системе и т.д.
Многоканальные системы занимают большую полосу частот, чем одноканальные. Они характеризуются спектральной ценой, которая показывает, во сколько раз следует увеличить ширину спектра сигнала, чтобы от одноканального сообщения перейти к многоканальному. Наряду со спектральной ценой важна ещё и энергетическая цена /5/.
![]() Рис. 1.2. Система типа “каждый с каждым”
Рис. 1.2. Система типа “каждый с каждым”
Многоканальные системы можно классифицировать по методам объединения и разделения сигналов абонентов. Объединение определяет формирование группового сигнала, а разделение – способ выделения отдельных сигналов на приемной стороне. Тот или иной способ объединения однозначно определяет метод разделения, поэтому РТС можно классифицировать по методам разделения.
Широко известны три метода разделения сигналов различных абонентов: частотное, временное и разделение по форме.
Метод частотного разделения каналов (ЧРК) заключается в том, что каждому абоненту отводится определенная полоса частот в пределах общей полосы частот системы. Сигналы абонентов не перекрываются по спектру, но перекрываются во времени, передаются одновременно. Разделение сигналов в приемнике осуществляется частотными фильтрами.
При временном разделении каналов (ВРК) каждый абонент работает в своем интервале времени, в течении которого сигналы других абонентов отсутствуют. Спектры сигналов абонентов занимают всю общую полосу частот, полностью перекрываются по частоте. В приемнике разделение сигналов различных абонентов осуществляется с использованием временных коммутаторов.
При разделении каналов по форме сигналов (РКФ) сигналы различных абонентов занимают общую полосу частот, передаются одновременно, т.е. перекрываются по частоте и во времени, но различаются структурой (формой) сигналов, которая выбирается так, что бы обеспечить ортогональность или квазиортогональность используемых сигналов. На приемной стороне для разделения сигналов различных абонентов должны использоваться устройства, различающие сигналы различной структуры (формы): корреляторы или согласованные фильтры.
Все рассмотренные методы разделения и соответствующие им методы объединения могут использоваться как при передаче многоканального сообщения через один передатчик центральной станции, так и при использовании каждым абонентом своего передатчика, что имеет место в системах типа “каждый с каждым”. При этом групповой сигнал в передатчике ЦС или сигнал на входе приемника в системах типа “каждый с каждым” формируется путем линейного суммирования абонентских сигналов.
Интересен ещё один метод объединения – комбинационный, который может использоваться только в системах с ЦС. Абоненты должны иметь дискретные источники, например, двоичные. При этом все источники должны работать синхронно на одинаковых или кратных скоростях. Групповой сигнал является отображением комбинаций символов источников.
Очень важной характеристикой является свободный доступ абонентов в систему, когда абоненты могут связываться по мере необходимости. Этот принцип реализуется в системе типа “каждый с каждым”, а также при других способах организации связи, в том числе при использовании спутника-ретранслятора /7, 14/. В общем случае организация обмена сообщениями в группе радиостанций называется многостанционным доступом (МСД). Задача МСД сводится к минимизации взаимных помех между сигналами различных станций, а также к оперативности установления контактов, удобству вхождения в связь, повышению эффективности использования спектра, энергетики, времени и т.д.
1.2. Многоканальные РТС при линейном разделении каналов
При линейных методах объединения и разделения каналов групповой сигнал формируется как линейная сумма канальных сигналов. Известные методы линейного разделения: частотное, временное и по форме сигналов – используется для построения многоканальных систем как при передачи группового сигнала многих абонентов одним передатчиком, так и при использовании каждым абонентом своего передатчика, что имеет место в радиорелейных системах и системах низовой радиосвязи, соответственно.
При ЧРК для разделения спектров сообщений используется какой-то вид модуляции, чаще всего однополосная модуляция. При этом поднесущие частоты выбираются таким образом, чтобы спектры соседних сигналов были распределены по оси частот с некоторым защитным интервалом. Защитные интервалы вводятся для уменьшения переходных помех и занимают от 10 до 30 % отведенной полосы частот. При объединении речевых сообщений с шириной спектра от 0,3 до 3,4 кГц каждому каналу отводится полоса 4кГц и защитный интервал равен 0,9 кГц. С использованием такого принципа реализованы устройства объединения на 1920, а также 2700 телефонных каналов, которые использовались в спутниковой системе связи с ИСЗ “Молния”.
В системах низовой радиосвязи частотное разделение используется как с закрепленными, так и с незакрепленными частотами. При работе с закрепленными частотами значения несущих частот являются адресным признаком сигнала. Однако при этом, как правило, имеет место неэффективное использование полосы частот, отведенной для системы, из – за малой активности абонентов.
Для более эффективного использования полосы частот применяют режим работы с незакрепленными частотами. Для системы выделяется некоторое число частотных каналов, которое гораздо меньше числа абонентов в системе. Несущие частоты уже не могут быть адресным признаком сигнала. Для адресации используются вызывные сигналы. Такой принцип частотного разделения называют иногда адаптивным частотным разделением /2/. Поиск свободной частоты связан с дополнительными затратами времени, а некоторые абоненты должны “стоять в очереди”.
Эффективное использование отведенной полосы частот обусловило широкое использование адаптивного частотного разделения каналов в системах связи для народного хозяйства. Например, в системе “Алтай” связь 200 абонентов осуществляется по 8 частотным каналам. Для упрощения поиска свободного канала вводится центральная станция. Вызывной сигнал представляется комбинацией тональных частот.
При разделении во времени сигналы различных абонентов должны передаваться в неперекрывающиеся интервалы времени, что достигается поочередной передачей их символов. Предварительно сообщения должны быть дискретизированы во времени. Для передачи значений сообщений в моменты дискретизации используются различные методы импульсной модуляции, чаще всего фазово-импульсная (ФИМ), импульсно-кодовая (ИКМ), дельта-модуляция (ДМ), которые обеспечивают высокую помехоустойчивость.
При ФИМ информация заложена в смещении импульса относительно тактовой точки. При ИКМ и ДМ проводится ещё и квантование по уровням. При ИКМ информация передается в виде кодовой комбинация, которая отражает номер уровня, к которому ближе всего лежит значение отсчета в момент дискретизации.
Для ФИМ и ИКМ частота дискретизации выбирается несколько больше частоты отсчетов в соответствии с теоремой В.А. Котельникова из – за погрешности расфильтровки. Для речевых сообщений с шириной спектра от 0,3 до 3,4 кГц она равна 8 кГц. Число уровней квантования при ИКМ равно 128 или 256. При таком числе уровней квантования длительность кодового символа равна 16 – 18 мкс, длина кодовой комбинации – 7 – 8 двоичных символов и ширина спектра сигнала 56 – 64 кГц. Полоса пропускания канала выбирается в три раза больше для снижения переходных помех за счет расширения импульсного сигнала.
Основной недостаток систем с ВРК – малое число объединяемых каналов. В настоящие время широко используется аппаратура объединения с ИКМ на 24 и 30 телефонных каналов. Но в телеметрии низкоскоростные источники позволяют увеличить число объединяемых каналов до несколько сот.
Энергетическая цена и ЧКР, и ВРК примерно равна числу объединяемых абонентов. Однако при ЧРК эта цена характеризует только среднюю мощность передатчика. Пиковая мощность будет значительно превосходить среднюю мощность вследствие большого пикфактора группового сигнала, и с увеличением числа объединяемых сообщений эта разница будет увеличиваться. При ЧРК имеет место неэффективное использование пиковой мощности передатчика. Спектральная цена ВРК также равна числу объединяемых абонентов.
В современных системах передачи информации часто стали использовать разделение каналов по форме сигналов.
Многоканальные РТС, использующие разделение каналов по форме сигналов (РКФ), обычно предназначаются для передачи цифровой информации. Чаще всего источники вырабатывают только два возможных символа: 1 и 0. В принципе могут использоваться и m – ичные источники.
В системах о РКФ двоичные символы информации 1 и 0 передаются с использованием множества сигналов ![]() , где
, где ![]() - номер абонента,
- номер абонента, ![]() , K – число абонентов, объединенных в систему. В общем случае сигналы различных абонентов должны быть попарно ортогональны на интервале длительности двоичных символов Т:
, K – число абонентов, объединенных в систему. В общем случае сигналы различных абонентов должны быть попарно ортогональны на интервале длительности двоичных символов Т:
![]()
![]()
![]() . (1.1)
. (1.1)
Передача символов сообщения с помощью сигналов ![]() показывает, что это сообщение предназначено
показывает, что это сообщение предназначено ![]() - му абоненту, т.е. сигнал
- му абоненту, т.е. сигнал ![]() является одновременно и адресом сообщения. Поэтому системы с РКФ часто называют адресными системами. Сигналы
является одновременно и адресом сообщения. Поэтому системы с РКФ часто называют адресными системами. Сигналы ![]() часто формируют в виде двоичных кодовых последовательностей. Вследствие этого разделение каналов по форме сигналов иногда называют кодовым разделением каналов (КРК).
часто формируют в виде двоичных кодовых последовательностей. Вследствие этого разделение каналов по форме сигналов иногда называют кодовым разделением каналов (КРК).
Разделение по форме может использоваться как в системах с центральной станцией (при централизованном объединении сигналов абонентов), так и в автономных многоканальных системах. В системах с ЦС все источники информации работают синхронно, существует временная синхронизация между ними, и такие системы называют синхронными адресными. При автономном объединении сигналов абоненты работают по принципу “каждый с каждым”, необходимости в синхронизации источников информации по времени и частоте нет, и такие системы называют асинхронными адресными системами связи (ААСС). В синхронных адресных системах можно обеспечить высококачественную работу большого количества абонентов, но необходимость их синхронизации обусловливает сложность всей системы и организации связи. Асинхронные адресные системы связи обеспечивают одновременную работу большого количества абонентов, разбросанных по значительной территории, но качество связи в них хуже. На вход приемника приходят сигналы абонентов, работающих в данный момент времени с различными случайными временными сдвигами, и условие ортогональности между сигналами абонентов обычно нарушается:
![]() (1.2)
(1.2)
так как невозможно выбрать большой ансамбль сигналов, которые был бы ортогональны при любых временных сдвигах. Отсутствие ортогональности приводит к тому, что на выходе приемника наряду с полезным сигналом будут присутствовать отклики сигналов других, работающих в данный момент времени, абонентов. Эти отклики создают дополнительные помехи, которые называются внутрисистемными.
Внутрисистемные помехи появляются вследствие нарушения ортогональности между сигналами “своего” и других абонентов, их иногда называют шумами неортогональности. Наличие внутрисистемных помех является основным недостатком ААСС. Этим они отличаются от синхронных адресных систем, в которых можно обеспечить ортогональность сигналов всех абонентов, а внутрисистемные помехи свести до уровня аппаратурных погрешностей.
ААСС обеспечивает простоту организации связи, и они, как многоканальные автономные системы, могут использоваться тогда, когда использование ЦС невозможно по некоторым причинам, как–то: случайное размещение абонентов на большой территории, движение абонентов с относительно большой скоростью, необходимость обеспечения живучести системы.
В системах с РКФ сигналы различных абонентов передаются одновременно в общей полосе частот, равной полосе частот системы. Ширина спектра сигналов F оказывается намного больше ширины спектра сообщения Fсооб . Сигналы, используемые в системах с РКФ, являются широкополосными, т.е. имеют большую базу: B=FT=F/ Fсооб>>1.
Величина базы сигналов определяет возможное число ортогональных сигналов, т.е. объем ансамбля сигналов. При объединении в систему числа абонентов K>>1 потребуется большое число возможных сигналов, равное приблизительно K, т.е. необходимо использовать сигналы с базой В![]() K. Все сигналы выбранного ансамбля должны формироваться с использованием определенных правил и удовлетворять условию ортогональности (1.1) или почти ортогональности:
K. Все сигналы выбранного ансамбля должны формироваться с использованием определенных правил и удовлетворять условию ортогональности (1.1) или почти ортогональности:
![]() (1.3)
(1.3)
где E – энергия сигнала S(t).
Структурная схема синхронной адресной системы с РКФ представлена на рис.1.3.
Сообщения от источников информации поступают на канальные модуляторы. Модулятор представляет символ «0» источника сигналом ![]() , а символ «1» - сигналом
, а символ «1» - сигналом ![]() . Адресные сигналы
. Адресные сигналы ![]() , вырабатываются генераторами адресных сигналов, работа которых синхронизируется синхронизатором. Сигналы
, вырабатываются генераторами адресных сигналов, работа которых синхронизируется синхронизатором. Сигналы ![]() выступают в качестве поднесущих, но эти поднесущие имеют сложную структуру, широкополосный спектр. В модуляторах осуществляется манипуляция этих сложных поднесущих символами источников. При этом может использоваться манипуляция с активной и пассивной паузами. При пассивной паузе символ «1» сообщения передается сигналом
выступают в качестве поднесущих, но эти поднесущие имеют сложную структуру, широкополосный спектр. В модуляторах осуществляется манипуляция этих сложных поднесущих символами источников. При этом может использоваться манипуляция с активной и пассивной паузами. При пассивной паузе символ «1» сообщения передается сигналом ![]() , а символу «0» соответствует отсутствию сигнала. При активной паузе можно работать с противоположными и ортогональными сигналами. При манипуляции с противоположными сигналами
, а символу «0» соответствует отсутствию сигнала. При активной паузе можно работать с противоположными и ортогональными сигналами. При манипуляции с противоположными сигналами ![]() (аналогом для узкополосных сигналов является ФМ со сдвигом фаг 0,π).
(аналогом для узкополосных сигналов является ФМ со сдвигом фаг 0,π).
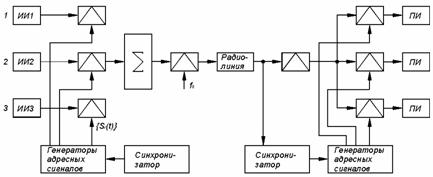
Рис. 1.3. Структурная схема синхронной адресной системы с РКФ (ИИ - источник информации, ПИ - потребитель информации)
При ортогональных сигналах ![]() и
и ![]() модуляция называется ортогональной (для узкополосных сигналов аналогом является частотная манипуляция). На рис. 1.4 иллюстрируется процесс получения канальных сигналов при использовании противоположных, ортогональных сигналов, а также сигналов с пассивной паузой.
модуляция называется ортогональной (для узкополосных сигналов аналогом является частотная манипуляция). На рис. 1.4 иллюстрируется процесс получения канальных сигналов при использовании противоположных, ортогональных сигналов, а также сигналов с пассивной паузой.
В качестве адресного сигнала часто используются двоичные последовательности длиной N. Для других источников (абонентов) используются двоичные последовательности такой же длины, но другой структуры. Ширина спектра адресного сигнала определяется длительностью элемента двоичной последовательности ![]() и равна
и равна ![]() . База сигнала В будет равна длине последовательности B=N независимо от используемого метода модуляции.
. База сигнала В будет равна длине последовательности B=N независимо от используемого метода модуляции.
Обратимся снова к структурной схеме синхронной адресной системы. Канальные сигналы всех абонентов линейно суммируются, образуя групповой сигнал, который затем модулирует несущую частоту f, по амплитуде, фазе или частоте. При суммировании большого числа канальных, сигналов групповой сигнал будет иметь большой пикфактор, как и при ЧРК. На каждый абонентский сигнал приходится ![]() часть средней мощности передатчика. Но с ростом K величина средней мощности передатчика при фиксированной пиковой мощности его уменьшается за счет большого пикфактора группового сигнала. При РКФ так же,
часть средней мощности передатчика. Но с ростом K величина средней мощности передатчика при фиксированной пиковой мощности его уменьшается за счет большого пикфактора группового сигнала. При РКФ так же,
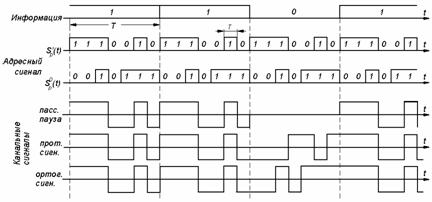
Рис. 1.4. Процесс получения канальных сигналов РКФ, N=7
как при ЧРК, в синхронных системах имеет место неэффективное использование мощности передатчика. В приемнике после демодуляции по несущей частоте стоят демодуляторы канальных сигналов, которые строятся как оптимальные приемники различения двух сигналов с использованием корреляторов. На корреляторы подаются адресные сигналы, формируемые специальными генераторами. Генераторы копий адресных сигналов синхронизируются синхросигналом так, чтобы их начало совпадало с началом соответствующих адресных сигналов на входе приемника (синхронизация по времени). Кроме того, синхросигнал используется для формирования специальных сигналов, необходимых для работы корреляторов. Синхросигнал формируется из принимаемого сигнала специальным устройством - синхронизатором. Наличие синхронизации работы всех абонентов ограничивает возможности синхронных адресных систем, например, абоненты должны работать на одинаковых или кратных скоростях, что возможно при работе их из одного пункта. Такие же требования предъявляются к системам с ВРК.
В ААСС передатчик и приемник обычно используются одним абонентом, и на выходе модулятора несущей частоты в передатчике действует канальный сигнал одного источника. Пикфактор сигнала на входе модулятора будет определяться одним адресным сигналом. Для повышения эффективности использования мощности передатчика сигналы выбираются так, чтобы обеспечить минимальный пикфактор канального сигнала. В этих системах синхронизация работы всех абонентов отсутствует, но необходима синхронизация работы генераторов адресного сигнала в передатчике и приемнике.
Основным достоинством РКФ является возможность свободного доступа в систему. Свободный доступ упрощает организацию связи, повышает ее оперативность и является одним из важнейших показателей современных систем передачи информации. Обычно система объединяет большое число K малоактивных абонентов. Одновременно будут работать Kа абонентов, которые называются активными (Kа случайная величина, обычно имеющая биномиальное распределение). В принципе одновременно может работать любое число абонентов, так как каждый абонент имеет свой адресный сигнал, который не зависит от того, работают ли другие абоненты или нет. В синхронных адресных системах увеличение числа абонентов сопровождается уменьшением средней мощности, приходящейся на один канал, а в ААСС - увеличением внутрисистемных помех.
При РКФ вхождение в связь не сопровождается поиском свободного канала, переход на другой канал (обмен информацией с другим абонентом) осуществляется простой сменой структуры сигнала без перестройки по частоте.
Энергетическая цена уплотнения при использовании РКФ в синхронных адресных системах такая же, как и при ЧРК. Но спектральная цена равна единице, т.е. ширина спектра многоканального сообщения примерно равна ширине спектра одноканального. При этом следует иметь в виду, что одноканальный источник использует широкополосный сигнал, ширина спектра которого гораздо больше ширины спектра сообщения.
1.3. Комбинационное объединение и многопозиционное кодирование сигналов в РТС
Описанные выше ЧРК, ВРК, РКФ относятся к линейным методам объединения, при которых групповой сигнал формируется как линейная сумма канальных сигналов. Для линейного объединения характерно равномерное распределение средней мощности передатчика по всем каналам. Если в каналах используются статистически одинаковые источники, то на каждый канал приходится ![]() часть средней мощности передатчика.
часть средней мощности передатчика.
Повысить эффективность использования средней мощности передатчика в многоканальных системах можно, используя комбинационное объединение сигналов. Комбинационный принцип обычно применяется при объединении синхронных двоичных сигналов. Канальные сигналы определяются комбинациями символов всех K объединяемых источников. Таких комбинаций всего ![]() , и каждой комбинации должен соответствовать свой сигнал. Например, при уплотнении 3 источников могут быть следующие комбинации символов источников: 000, 001, 010, 011 и т.д. - всего 8 комбинаций. В устройстве объединения каждой комбинации ставится в соответствие определенный канальный сигнал
, и каждой комбинации должен соответствовать свой сигнал. Например, при уплотнении 3 источников могут быть следующие комбинации символов источников: 000, 001, 010, 011 и т.д. - всего 8 комбинаций. В устройстве объединения каждой комбинации ставится в соответствие определенный канальный сигнал ![]() . На рис.1.5а иллюстрируется принцип комбинационного объединения (КО).
. На рис.1.5а иллюстрируется принцип комбинационного объединения (КО).
В приемнике ![]() - ичный сигнал должен быть расщеплен на
- ичный сигнал должен быть расщеплен на ![]() абонентских сигналов. Приемное устройство строится как оптимальный различитель
абонентских сигналов. Приемное устройство строится как оптимальный различитель ![]() сигналов с использованием
сигналов с использованием ![]() трактов корреляционной обработки. Структурная схема преемника при КО представлена на рис.1.6. В нем напряжения с выходов корреляторов подаются на схему выбора максимума. Эта схема выносит решение, в каком тракте сигнал принимает наибольшее значение. Но каждый тракт соответствует какой-то комбинации символов объединяемых источников. Далее дешифратор формирует соответствующие кодовые комбинации и распределяет их по получателям. Дешифратор имеет
трактов корреляционной обработки. Структурная схема преемника при КО представлена на рис.1.6. В нем напряжения с выходов корреляторов подаются на схему выбора максимума. Эта схема выносит решение, в каком тракте сигнал принимает наибольшее значение. Но каждый тракт соответствует какой-то комбинации символов объединяемых источников. Далее дешифратор формирует соответствующие кодовые комбинации и распределяет их по получателям. Дешифратор имеет ![]() выходов.
выходов.
При комбинационном объединении фактически используются многопозиционные сигналы, при которых символы одного двоичного сообщения объединяются в группы по ![]() символов. Процесс формирования многопозиционного сигнала поясняется рис.1.5б. Каждый сигнал имеет длительность в
символов. Процесс формирования многопозиционного сигнала поясняется рис.1.5б. Каждый сигнал имеет длительность в ![]() раз больше длительности двоичного символа и содержит количество информации
раз больше длительности двоичного символа и содержит количество информации ![]() бит. На рис.1.5б
бит. На рис.1.5б ![]() и длительность сигнала
и длительность сигнала ![]() . Приемник строится как многоканальный коррелятор, но дешифратор имеет один выход и выдает информацию в последовательном коде. Помехоустойчивости многопозиционных сигналов исследовалась в ряде работ, например, /2, 15, 17/. Результаты этих исследований можно использовать для оценки помехоустойчивости при комбинационном объединении.
. Приемник строится как многоканальный коррелятор, но дешифратор имеет один выход и выдает информацию в последовательном коде. Помехоустойчивости многопозиционных сигналов исследовалась в ряде работ, например, /2, 15, 17/. Результаты этих исследований можно использовать для оценки помехоустойчивости при комбинационном объединении.
Вероятность ошибки при гауссовской помехе при многопозиционных сигналах рассчитана на ЭВМ. В /17/ и приложении 2 приведены таблицы вероятности ошибочного приема комбинации из K символов и одного символа для ![]() . Вероятность ошибочного приема комбинации из k символов для ортогональных сигналов можно представить приближенной формулой
. Вероятность ошибочного приема комбинации из k символов для ортогональных сигналов можно представить приближенной формулой
![]() (1.4)
(1.4)
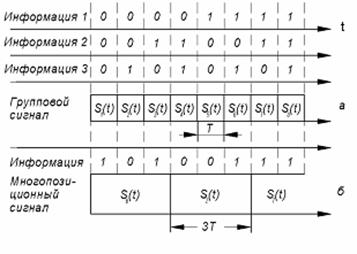
Рис. 1.5. Принципы формирования группового сигнала при комбинационном объединении сигналов (а) и при многопозиционных сигналах (б)
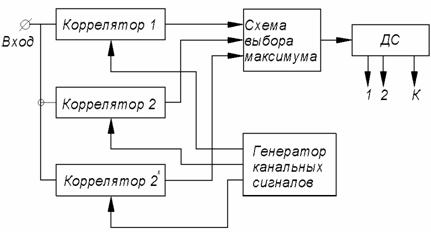
Рис.1.6. Структурная схема приемника при комбинационном объединении сигналов
где ![]() - отношение энергии сигнала длительностью Т к спектральной плотности шума;
- отношение энергии сигнала длительностью Т к спектральной плотности шума; ![]() - вероятность ошибки, которая обеспечивалась бы в двоичной системе при использовании каких-то двух из
- вероятность ошибки, которая обеспечивалась бы в двоичной системе при использовании каких-то двух из ![]() канальных сигналов
канальных сигналов
![]() ,
, ![]() . (1.5)
. (1.5)
(Таблицы ![]() для
для ![]() приведены в /6/).
приведены в /6/).
Выражение (1.4) требует пояснения. Вероятность ошибки ![]() определяется при увеличенной в
определяется при увеличенной в ![]() раз энергии сигнала по сравнению с двоичной системой. Это увеличение энергии происходит за счет увеличения длительности канальных сигналов: в двоичной системе длительность сигнала
раз энергии сигнала по сравнению с двоичной системой. Это увеличение энергии происходит за счет увеличения длительности канальных сигналов: в двоичной системе длительность сигнала ![]() , при многопозиционных сигналах -
, при многопозиционных сигналах - ![]() (см. рис.1.5). Но при приеме с помощью многоканального коррелятора происходит увеличение вероятности ошибки приблизительно в
(см. рис.1.5). Но при приеме с помощью многоканального коррелятора происходит увеличение вероятности ошибки приблизительно в ![]() раз за счет того, что схема выбора максимума сравнивает по уровню
раз за счет того, что схема выбора максимума сравнивает по уровню ![]() сигналов. Поэтому в (1.4) есть множитель
сигналов. Поэтому в (1.4) есть множитель ![]() .
.
При этом следует иметь в виду, что ошибочный прием комбинации не приводит к ошибочному приему всех ![]() двоичных символов. Например, если при передаче группы 001 вынесено решение с ошибкой в пользу комбинации 011, то ошибочно будет принят только один символ. В результате этого вероятность ошибочного приема одного символа при ошибочном приеме комбинации будет равна
двоичных символов. Например, если при передаче группы 001 вынесено решение с ошибкой в пользу комбинации 011, то ошибочно будет принят только один символ. В результате этого вероятность ошибочного приема одного символа при ошибочном приеме комбинации будет равна ![]() . Тогда вероятность ошибочного приема двоичного символа будет определяться следующим выражением:
. Тогда вероятность ошибочного приема двоичного символа будет определяться следующим выражением:
![]() . (1.6)
. (1.6)
Значения вероятности ошибочного приема символа сообщения при многопозиционных сигналах для ![]() представлены на рис. 1.7 (кривая 1). На этом же рисунке представлены кривые зависимости ошибки в двоичной системе от
представлены на рис. 1.7 (кривая 1). На этом же рисунке представлены кривые зависимости ошибки в двоичной системе от ![]() при использовании противоположных и ортогональных сигналов, рассчитанные по формуле:
при использовании противоположных и ортогональных сигналов, рассчитанные по формуле:
![]() , (1.7)
, (1.7)
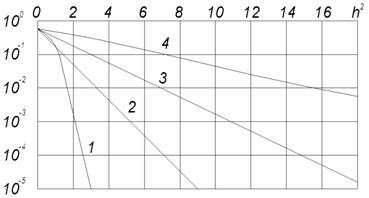
Рис.1.7. Вероятность ошибочного приема одного символа сообщения в одноканальной системе (1 - при многопозиционных сигналах, ![]() ; 2 - при противоположных сигналах; 3 - ортогональных сигналах) и при комбинационном объединении 10 источников, ортогональные сигналы (кривая 4)
; 2 - при противоположных сигналах; 3 - ортогональных сигналах) и при комбинационном объединении 10 источников, ортогональные сигналы (кривая 4)
где ![]() для противоположных сигналов,
для противоположных сигналов, ![]() для ортогональных сигналов (кривые 2 и 3 соответственно).
для ортогональных сигналов (кривые 2 и 3 соответственно).
Из рис.1.7 видно, что многопозиционные сигналы дают значительный выигрыш по энергетике по сравнению с двоичными. Например, для получения вероятности ошибки ![]() требуется при многопозиционных сигналах
требуется при многопозиционных сигналах ![]() , а при двоичных противоположных -
, а при двоичных противоположных - ![]() , т.е. в 7 раз больше. Это показывает, что в многопозиционном кодировании заложены огромные возможности по повышению эффективности использования мощности передатчика.
, т.е. в 7 раз больше. Это показывает, что в многопозиционном кодировании заложены огромные возможности по повышению эффективности использования мощности передатчика.
При комбинационном объединении вероятность ошибки будет определяться формулой, аналогичной (1.6), но энергия сигнала должна быть уменьшена в ![]() раз, так как длительность сигнала при объединении не увеличивается (см.рис.1.5):
раз, так как длительность сигнала при объединении не увеличивается (см.рис.1.5):
![]() . (1.8)
. (1.8)
При пользовании таблицами приложения 2 для комбинационного объединения следует иметь в виду, что определенная величина вероятности ошибки будет соответствовать значению ![]() , которое в
, которое в ![]() раз больше табличного значения
раз больше табличного значения ![]() .
.
Вероятность ошибочного приема символа одного источника при комбинационном объединении приведена на рис.1.7 (кривая 4). Многоканальная передача требует увеличения энергетических затрат по сравнению с одноканальными системами (кривые 1,2,3 на рис.1.7), и это естественно. Но комбинационное объединение требует значительно меньшего увеличения энергетических затрат, чем линейные методы объединения.
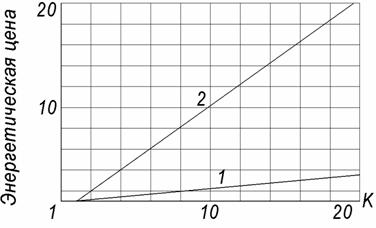
Рис.1.8. Энергетическая цена многоканальной передачи при комбинационном (кривая 1) и временном (кривая 2) объединении
На рис.1.8 представлена зависимость энергетической цены многоканальной передачи при комбинационном объединении (кривая 1) и пи ВРК (кривая 2). При ВРК, как показано в §1.3, энергетическая цена равна числу уплотняемых источников ![]() . При комбинационном объединении энергетическая цена также линейно меняется с ростом
. При комбинационном объединении энергетическая цена также линейно меняется с ростом ![]() , но значительно медленнее: при
, но значительно медленнее: при ![]() энергетическая цена при комбинационном объединении равна 2,1, при ВРК – 10.
энергетическая цена при комбинационном объединении равна 2,1, при ВРК – 10.
К настоящему времени комбинационное объединение реализовано только применительно к узкополосным системам при малом числе объединяемых сигналов. Это широко известные двойная частотная телеграфия (ДЧТ) и двойная фазовая телеграфия (ДФТ). Чаще используется двойная относительная фазовая телеграфия (ДОФТ). Эти методы ДЧТ, ДФТ и ДОФТ позволяют объединить двоичные сигналы всего двух источников информации.
Определенные комбинации символов двух источников соответствуют отрезкам гармонических колебаний с определенными частотами ![]() при ДЧТ и с определенными фазовыми сдвигами
при ДЧТ и с определенными фазовыми сдвигами ![]() , при ДФТ. Это иллюстрируется табл.1.1. Четыре значения фазы при ДФТ или ДОФТ имеют сдвиг относительно друг друга, кратный
, при ДФТ. Это иллюстрируется табл.1.1. Четыре значения фазы при ДФТ или ДОФТ имеют сдвиг относительно друг друга, кратный ![]() . Например,
. Например, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Таблица 1.1
|
Символы |
1-го ист. |
1 |
1 |
0 |
0 |
|
2-го ист. |
1 |
0 |
1 |
0 |
|
|
Сигналы при |
ДТЧ |
f1 |
f2 |
f3 |
f4 |
|
ДФТ ДОФТ |
φ1 |
φ2 |
φ3 |
φ4 |
Двукратная ЧТ расширяет спектр по сравнению с одноканальной системой с ЧТ в 2 раза, как при линейном частотном объединении. Однако энергетическая цена значительно меньше: 1,1, a при частотном объединении значительно больше 2 за счет пикфактора группового сигнала. Структурная схема приемного устройства при ДЧТ приведена на рис.1.9. Принятый сигнал разделяется фильтрами ![]() выходы которых подключаются к детекторам. Соединения детекторов с фильтрами выполнены в соответствии с табл.1.1.
выходы которых подключаются к детекторам. Соединения детекторов с фильтрами выполнены в соответствии с табл.1.1.
Двукратная относительная фазовая телеграфия. Рассмотрим несколько подробнее ДОФТ. Схема демодуляции и разделения чаще всего выполняется с использованием коммутируемых высокодобротных фильтров. Структурная схема приемного устройства ДОФТ представлена на рис.1.10
Фильтры Ф1 и Ф2 настроены на среднюю частоту сигналов. Коммутатор каналов КК поочередно подключает принятые посылки то к фильтру Ф1, то к фильтру Ф2. К моменту подключения следующей посылки колебания в фильтре должны быть погашены. Это осуществляется подключением выходов фильтров к нулевому потенциалу, для чего используется специальные импульсы гашения. Сигнал коммутации для коммутатора каналов и импульсы гашения вырабатываются устройством синхронизации. Когда входной сигнал подключается к Ф2, в Ф1 колебания предыдущей посылки сохраняются.
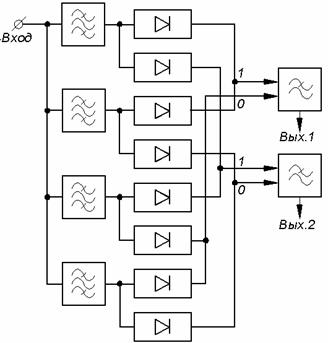
Рис.1.9. Структурная схема приемного устройства при ДТЧ
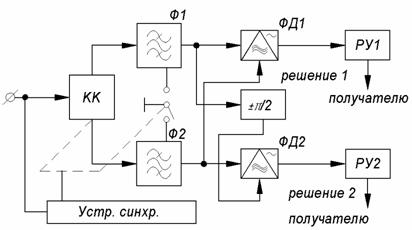
Рис.1.10. Структурная схема приемного устройства при ДОФТ
Сигнал фильтра Ф1 используется в качестве опорного для фазового детектора ФД2, а сигнал фильтра Ф2 - для фазового детектора ФД1. Работа схемы иллюстрируется рис.1.11.
Первые три строки этого рисунка (а, б, в) представляют информации источников и фазовый сдвиг посылок при использовании ДОФТ. Следующие строки относятся к приемной части системы. На строках (г-ж) приводятся служебные сигналы: сигналы коммутации фильтров и импульсы гашения. В строках (з, и) представлено напряжение на выходах фильтров: огибающая и фаза гармонического колебания. Во время подключения посылки напряжение линейно возрастает, фаза устанавливается равной фазе посылки. Затем происходит переключение фильтров, от рассматриваемого фильтра сигнал отключается, напряжение на его выходе сохраняется благодаря высокой добротности фильтра. Далее осуществляется гашение сигнала: под воздействием импульса гашения амплитуда напряжения на выходе резко снижается до нуля. В фазовом детекторе ФД1 сравниваются по фазе два колебания - с Ф1 и Ф2. Разность фаз этих сигналов записана в строке (к). Напряжение на выходе ФД пропорционально косинусу разности фаз, и в строке (л) представлена полярность напряжения на выходе ФД1. Решающее устройство выносит решение «1», если напряжение на его входе положительно, и «0» при отрицательном напряжении. Сравнение решения с информацией 1-го источника показывает, что демодуляция первого сообщения проведена правильно (помехи отсутствуют). Для второго тракта следует провести аналогичные рассуждения, но на ФД2 сигнал фильтра Ф1 подается через фазовращатель, который меняет фазу на ![]() . Фаза сигнала на выходе фазовращателя представлена на строке (о). Решение, представленное на строке (с), соответствует информации, переданной вторым источником.
. Фаза сигнала на выходе фазовращателя представлена на строке (о). Решение, представленное на строке (с), соответствует информации, переданной вторым источником.
Основным препятствием на пути широкого использования комбинационного объединения до настоящего времени была ограниченность ансамбля ортогональных сигналов, существующая в рамках узкополосных систем (напомним, что объем ансамбля ортогональных сигналов определяется базой сигналов). Кроме того, увеличение кратности объединения приводило, как правило, к значительному расширению полосы частот канала, например, при многократной ЧТ, и к значительному усложнению приемного устройства, так как число трактов обработки сигналов с ростом кратности объединения увеличивается по показательному закону.
Использование комбинационного объединения сигналов наиболее перспективно в широкополосных системах, где для передачи двоичных сообщений используются сигналы с большой базой.
Рис.11. Обработка ДОФТ - сигнала в демодуляторе с коммутируемыми фильтрами
При большой базе можно получить большой ансамбль ортогональных или квазиортогональных сигналов и это не будет связано с расширением спектра /2, 11, 18/.
Основным сдерживающим фактором использования комбинационного объединения сигналов в широкополосных системах связи является трудность технической реализации многоканального коррелятора.
Но это проблема временная, так как цифровые методы обработки сигналов, состояние современной и будущей элементной базы позволяют реализовать уже сейчас сложнейшие приемные устройства.
1.4. Основная информация
1. Многоканальные РТС передачи информации, являясь одним из основных средств общения между людьми, различаются между собой по конфигурации обмена в зависимости от их применения: это системы связи типа «из точки в точку», «каждый с каждым», а также радиальные системы связи.
Для построения многоканальных РТС используются различные методы объединения и разделения сигналов, среди которых основными являются: частотное (ЧРК), временное (ВРК), разделение каналов по форме сигналов (РКФ) и комбинационное объединение сигналов (КО).
2. При ЧРК канальные сигналы должны иметь неперекрывающиеся спектры. При объединении большого числа сообщений для передачи их через один передатчик, что имеет место, например, в радиорелейных системах, чаще всего используется однополосная модуляция с подавленной несущей. Это приводит к экономному использованию частотного диапазона, а также к более эффективному использованию мощности передатчика. ЧРК позволяет получить каналообразующую аппаратуру на большое число каналов (до 2700), а также находит широкое применение в многоканальных автономных системах связи с закрепленными и незакрепленными частотами.
3. При ВРК требуется обеспечить неперекрытие канальных сигналов во времени. При передаче непрерывного сообщения это можно реализовать, если предварительно преобразовать непрерывное сообщение в дискретную или цифровую форму.
4. При РКФ сигналы всех абонентов занимают общую полосу частот и перекрываются во времени, но различаются своей формой, структурой. Символы сообщения передаются с использованием сложных широкополосных сигналов с большой базой. Эти сигналы одновременно являются адресными.
Особенно эффективно использование РКФ в асинхронных адресных системах связи (ААСС), которые работают по принципу «каждый с каждым». При этом методе организация связи отличается простотой, оперативностью, характеризуется живучестью и находит широкое применение. Характерной особенностью ААСС с РКФ является наличие внутрисистемных помех, которые появляются в результате нарушения ортогональности сигналов из-за асинхронного принципа работы абонентов.
Основным достоинством РКФ является возможность удовлетворить требованию свободного доступа в систему.
5. Комбинационный принцип используется для объединения небольшого (до 10) числа синхронных двоичных источников. Основным достоинством комбинационного объединения является эффективное использование мощности передатчика: при объединении 5 двоичных сообщений комбинационное уплотнение потребует в 1,7 раз меньше мощности передатчика, чем ВРК, а при уплотнении 10 двоичных сообщений - в 2,4 раза.
Комбинационное объединение перспективно для широкополосных РТС, особенно с учетом прогресса технической реализации многоканальных корреляторов.
1.5. Вопросы для самопроверки и самостоятельной работы
1. Чем принципиально отличаются различные методы разделения каналов?
2. Какие методы разделения позволяют реализовать свободный доступ в систему абонентов?
3. Какие трудности возникают при организации свободного доступа абонентов в систему при временном разделении каналов?
4. Почему при частотном разделении каналов в радиорелейных системах пиковая мощность передатчика используется менее эффективно, чем средняя?
5. Какие методы разделения каналов могут использоваться в многоканальных системах: а) централизованных, б) автономных?
6. Чем принципиально отличается комбинационное объединение сигналов от линейных? Поясните, почему принципиально комбинационное объединение позволяет более эффективно использовать мощность передатчика, чем линейные методы. О какой мощности идет речь: пиковой или средней?
7. Что такое коэффициент активности и занятости абонента?
8. В чем состоит особенность работы передающего и приемного устройств ЦС радиальной системы связи?
9. На каких методах различения сигналов может быть основан многостанционный доступ в спутниковых системах связи?
10. Перечислите преимущества и недостатки кабельной, радиорелейной, тропосферной, спутниковой систем связи.
11. Приведите примеры систем, когда минимизация времени доступа в систему играет большую роль, нежели качество передачи информации.
12. Что такое гибкость системы связи?
13. Назовите примеры дополнительных услуг, представляемых пользователям системами связи, помимо собственно передачи информации.
1.6. Задачи
1.1. Для передачи телеметрической информации используется радиоканал с шириной спектра 10 МГц. Какое число сообщений можно передать по этому каналу, если каждое сообщение имеет ширину спектра 10 Гц и равномерное распределение амплитуд в диапазоне от Амин до Амакс, а необходимая точность его воспроизведения при отсутствии помех не должна быть хуже 1%? Задачу решить для случая использования временного разделения с а) ИКМ, б) ФИМ.
1.2. По условию задачи 1.1 оценить, как изменится число объединяемых сигналов источников, если распределение сообщения будет отличаться от равномерного и будет нормальным.
1.3. 100 абонентов с речевыми сообщениями объединяются в систему с использованием ЧРК, ВРК, РКФ. Оценить ширину спектра частот, занимаемую системой при каждом методе разделения.
1.4. Какое максимальное количество телеграфных сообщений можно передать по аналоговому каналу ТЧ (0,3-3,4 Гц)?
1.5. Определить энергетические затраты на передачу 1 бит информации при одноканальной передаче с использованием следующих сигналов: а) противоположных, 6) ортогональных, в) многопозиционных, если допускается вероятность ошибки 10-4.
1.6. Определить требуемую среднюю мощность сигнала для передачи одноканального сообщения при использовании сигналов: а) противоположных, б) ортогональных, в) многопозиционных с K=2, 5, 10, если допустимая вероятность ошибки 10-4 , спектральная плотность шума 10-4 Вт/Гц, а скорость телеграфирования 100 Гц.
1.7 По условию задачи 1.6 определить: а) какое количество информации передается каждым сигналом, б) какой вид передачи требует меньших энергетических затрат на передачу 1 бит, в) какова должна быть минимальная полоса пропускания канала связи.
1.8. Для передачи сообщений 10 источников можно использовать ВРК с противоположными и ортогональными сигналами, а также РКФ.
Определить энергетические затраты при использовании этих методов разделения и оценить, во сколько раз можно уменьшить затраты средней мощности передатчика при использовании комбинационного объединения при вероятности ошибки 10-4. Какие ограничения накладываются при этом на источники информации?
1.9. Сообщения двух источников передаются с использованием ДОФТ. Представить последовательность фаз на выходе передатчика, если первый источник выдает последовательность символов 0000111000, а второй источник – 1100110011. Нарисовать схему приемника с коммутируемыми фильтрами и представить эпюры напряжений при подаче на вход сигнала с полученной последовательностью фаз несущей частоты. Убедиться, что на выходах приемника при отсутствии помех создаются сообщения источников.
1.10. К условиям задачи 1.9 добавляется изменение фазы посылок на входе приемника. Как изменятся сообщения в следующих случаях: а) все посылки получают дополнительный фазовый сдвиг Ф0, 6) одна посылка получит дополнительный фазовый сдвиг Ф0? При каких значениях Ф0 в случаях а) и б) сообщения источников будут искажаться? '
1.11. В условиях задачи 1.10 как повлияет на искажения сообщений изменение правила формирования сигналов ДОФМн, например, комбинации 11 соответствует сдвиг 0°, 00 - 180°, 10 - 90°, 01 - 90°?
2. Многоканальные радиотехнические системы прердачи информации с разделением каналов по форме сигналов
2.1. Разделение по форме сигналов в асинхронных адресных системах
Многоканальные автономные системы передача информации часто называют асинхронными адресными системами связи (ААСС), подчеркивая этим особенности их работы:
- абоненты работают асинхронно;
- связь осуществляется но принципу «каждый с каждым»;
- информация передается с использованием адресных сигналов, которые одновременно являются переносчиками информации и указывают, кому предназначено сообщение.
В ААСС обычно используются одноканальные передатчики, например, для связи с подвижными объектами. Здесь наиболее приемлем асинхронный принцип работы всех абонентов. Кроме того, абоненты системы имеют малый коэффициент активности, определяемый отношением среднего числа активных абонентов (работающих одновременно) к общему числу абонентов:![]() . Число необходимых сигналов, адресов определяется общим числом абонентов K и равно K при использовании противоположных сигналов или при пассивной паузе или 2K при использовании ортогональных сигналов. Основным отличительным свойством ААСС является наличие внутрисистемных помех, обусловленное тем, что на входе приемника кроме полезного сигнала присутствуют сигналы других абонентов. Эти сигналы называются мешаюшими.
. Число необходимых сигналов, адресов определяется общим числом абонентов K и равно K при использовании противоположных сигналов или при пассивной паузе или 2K при использовании ортогональных сигналов. Основным отличительным свойством ААСС является наличие внутрисистемных помех, обусловленное тем, что на входе приемника кроме полезного сигнала присутствуют сигналы других абонентов. Эти сигналы называются мешаюшими.
Для ААСС важнейшей задачей является оценка уровня внутрисистемных помех, влияния их на требования к используемым сигналам, на достоверность передачи информации, а также оценке эффективности использования полосы частот канала. Далее подробно остановимся на рассмотрении этих задач.
Опенка внутрисистемных помех и их влияния на помехоустойчивость /2/. Предположим, что в системе работают одновременно kа абонентов. Сигналы всех этих абонентов присутствуют на входе приемника; из этих сигналов один будет полезным (на этот сигнал настроен приемник), а остальные (kа-1) сигналов будут мешающими. Предположим далее, что средние мощности сигналов всех абонентов на входе приемника будут одинаковыми и равными средней мощности полезного сигнале Рс. Тогда можно считать, что на входе приемника действует гауссовская помеха, средняя модность которой определяется суммарной мощностью мешающих сигналов:![]() . Если сигналы имеют равномерную спектральную плотность в общей полосе частот, то внутрисистемные помехи будут характеризоваться спектральной плотностью, равной
. Если сигналы имеют равномерную спектральную плотность в общей полосе частот, то внутрисистемные помехи будут характеризоваться спектральной плотностью, равной ![]() , и для оценки помехоустойчивости можно использовать формулу для средней вероятности ошибка оптимального приема при гауссовском белом шуме (1.7), но параметр h2 надо определять с учетом всех помех, действующих на входе приемника,
, и для оценки помехоустойчивости можно использовать формулу для средней вероятности ошибка оптимального приема при гауссовском белом шуме (1.7), но параметр h2 надо определять с учетом всех помех, действующих на входе приемника,
![]() , (2.1)
, (2.1)
где В – база сигнала.
Если ![]() и
и ![]() , т.е. внутрисистемные помехи по уровню превосходят шумы приемника, то
, т.е. внутрисистемные помехи по уровню превосходят шумы приемника, то ![]() и
и
![]() , (2.2)
, (2.2)
где γ=2 для противоположных сигналов, γ=1 для ортогональных сигналов и при пассивной паузе.
Режим работы ААСС с пассивной паузой следует пояснить.
При пассивной паузе каждый абонент излучает сигнал приблизительно с вероятностью 0,5, равной вероятности выдачи источником символа «1» (или «0»). При суммировании сигналов от kа абонентов фактически будут линейно складываться в каждый момент в среднем kа/2 сигналов, т.е. уровень помех будет в два раза меньше, что компенсирует коэффициент γ=1/2 в формуле (1.7) для пассивной паузы. В результате вероятность ошибки при учете только внутрисистемных помех будет одинаковой для пассивной паузы и ортогональных сигналов.
Таким образом, при заданном качестве передачи информации (h2 задано), при учете только внутрисистемных помех база сигнала должна быть в ![]() больше числа одновременно работающих абонентов
больше числа одновременно работающих абонентов
![]() . (2.3)
. (2.3)
Оценим влияние внутренних шумов. Обратимся к формуле (2.1), положив, что ![]() . Обозначив через
. Обозначив через ![]() значение параметра h2, обусловленное учетом только внутренних шумов, получим
значение параметра h2, обусловленное учетом только внутренних шумов, получим
 .
.
Обычно h2 задано, ![]() , тогда для обеспечения заданного качества передачи информации ка абонентами должны быть использованы сигналы с базой
, тогда для обеспечения заданного качества передачи информации ка абонентами должны быть использованы сигналы с базой
![]() . (2.4)
. (2.4)
Это выражение при ![]() преобразуется к виду
преобразуется к виду
![]() . (2.5)
. (2.5)
Наличие внутренних шумов приемника требует увеличения базы сигналов; относительное увеличение базы определяется только отношением параметров ![]() и
и ![]() и при
и при ![]() определяется формулой
определяется формулой
![]() .
.
Если увеличение базы сигналов невозможно, то для сохранения качества передачи информации потребуется уменьшение числа одновременно работающих абонентов. Относительное уменьшение числа активных абонентов также определяется отношением ![]() к
к ![]()
![]() .
.
Зависимость между базой сигналов, числом активных абонентов и величиной ![]() , при различном качестве передачи сообщений (h2 - разное) представлены на рис.2.1.
, при различном качестве передачи сообщений (h2 - разное) представлены на рис.2.1.
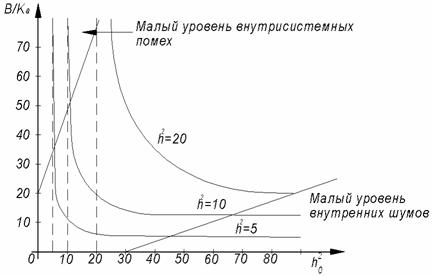
Рис.2.1. Зависимость базы сигналов В, числа активных абонентов ка от уровня внутренних шумов при различном качестве передачи
Эффективность использования общей полосы частот. В гл.1 методы объединения характеризовались спектральной ценой, которая определялась как увеличение полосы частот при многоканальной передаче по сравнению с одноканальной. Спектральная цена РКФ минимальна и равна 1, если в одноканальной системе используются широкополосные сигналы с той же базой.
Эффективность использования общей полосы частот канала /2/ характеризуется коэффициентом использования частот, определяемым как
![]() (2.6)
(2.6)
и показывающим, какую часть полосы канала занимает суммарная ширина спектра сообщений всех одновременно работающих абонентов kа.
Этот коэффициент имеет смысл вводить именно для ААСС, когда активность абонентов мала.
Асинхронный принцип связи можно реализовать и при ЧРК. В этом случае принцип работы «каждый с каждым» может быть реализован только при выделении каждому абоненту своего частотного канала, т.е. система должна быть с закрепленными частотами. Но одновременно будут работать небольшое число абонентов kа<<K, каждый абонент занимает полосу частот Fа, называемую абонентской, которая может быть шире ширины спектра сообщения Fa>>Fсооб . Обозначим ![]() . Тогда
. Тогда
![]() . (2.7)
. (2.7)
Для ЧРК ![]() ,
,
![]() . (2.8)
. (2.8)
При РКФ сигналы каждого абонента занимают всю полосу частот канала Fa=F, β=В и с учетом (2.3)
![]() . (2.9)
. (2.9)
Эффективность использования общей полосы частот при РКФ будет выше, чем при ЧРК, если ![]() , т.е.
, т.е.
![]() или
или ![]() . (2.10)
. (2.10)
Сравнивая (2.8) и (2.9), можно получить соотношение для определения базы сигнала, при которой РКФ будет более эффективно использовать общую полосу частот:
![]() .
.
Параметр β имеет смысл базы одноканального сигнала при ЧРК: ![]() .
.
Тогда ![]() можно определить как эквивалентную базу канального сигнала при РКФ. Можно говорить, что РКФ будет эффективнее использовать общую полосу частот по сравнению с ЧРК, если эквивалентная база одноканального сигнала при РКФ будет меньше базы одноканального сигнала при ЧРК:
можно определить как эквивалентную базу канального сигнала при РКФ. Можно говорить, что РКФ будет эффективнее использовать общую полосу частот по сравнению с ЧРК, если эквивалентная база одноканального сигнала при РКФ будет меньше базы одноканального сигнала при ЧРК:
![]() . (2.11)
. (2.11)
Эквивалентная база одноканального сигнала может быть меньше 1, что возможно при малой активности абонентов. Это можно показать, используя значение базы, полученное для заданного уровня внутрисистемных помех и определяемое формулой (2.3):
![]() . (2.12)
. (2.12)
При h2 =10, ![]() эквивалентная база одноканального сигнала
эквивалентная база одноканального сигнала ![]() .
.
При ЧРК база одноканального сигнала ![]() : при однополосной модуляции
: при однополосной модуляции![]() , при амплитудной модуляции
, при амплитудной модуляции ![]() , при частотной модуляции
, при частотной модуляции ![]() . Таким образом, соотношение (2.11) выполняется для практически интересных случаев (h2 =10,
. Таким образом, соотношение (2.11) выполняется для практически интересных случаев (h2 =10, ![]() ), и РКФ будет эффективнее использовать общую полосу частот, чем ЧРК.
), и РКФ будет эффективнее использовать общую полосу частот, чем ЧРК.
Поясним сказанное на примере многоканальной РТС, обеспечивающей обмен сообщениями между абонентами по принципу «каждый с каждым». Из общего количества 1000 обслуживаемых абонентов одновременно могут работать до 100 абонентов. Пусть абоненты передают двоичные сообщения со скоростью V=100 бит/с, т.е. ширина спектра сообщения равна приблизительно Fсооб=100 Гц.
Оценим коэффициент использования полосы частот для РТС с ЧРК и с РКФ. Пусть в случав ЧРК используется ЧМ и для каждого абонента отводится полоса Fа= 500 Гц. Общая полоса частот системы равна ![]() МГц. В среднем одновременно используется только часть полосы, необходимая для передачи сообщений 100 абонентами, т.е. 50 кГц. Коэффициент использования полосы в соответствии с (2.7) равен
МГц. В среднем одновременно используется только часть полосы, необходимая для передачи сообщений 100 абонентами, т.е. 50 кГц. Коэффициент использования полосы в соответствии с (2.7) равен
![]() .
.
В случае же РКФ выбор базы сигнала проведем о использованием выражения (2.3): при заданных значениях h2=10 и ка= 100, В=1000.
Полоса частот системы будет в базу В раз больше ширины спектра сообщения, т.е. F=BFсооб=0,1 МГц и
![]() ,
,
т.е. коэффициент использования полосы частот при РКФ в 5 раз больше чем при ЧРК.
Об эффективности использования полосы частот можно судить также по эквивалентной полосе частот, приходящейся на одно сообщение. При РФК в полосе частот F=0,1 МГц размещается 103 абонентов и эквивалентная полоса частот
![]() кГц
кГц
в 5 раз меньше, чем полоса частот, отведенная для передачи сообщения одного абонента при ЧРК.
Из этого примера видно, что РКФ требует для передачи информации в системе меньшей полосы частот, и за счет этого имеет место более эффективное использование радиоспектра.
2.2. Основные характеристики сигналов в РТС ПИ с РКФ
Сигналы с большой базой, используемые при РКФ, различаются между собой только по форме (по структуре). Их прием возможен с использованием корреляторов или согласованных фильтров /9, 16, 18/. Коррелятор строится по схеме, приведенной на рис.2.2.
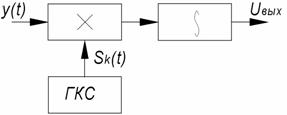
Рис.2.2. Структурная схема коррелятора
На вход коррелятора подается смесь полезного сигнала Sk(t), мешающих сигналов ![]() и шума n(t):
и шума n(t):
![]() . (2.13)
. (2.13)
Генератор копии сигнала формирует сигнал Sk(t), который совпадает по форме с полезным сигналом на входе приемника с точностью до фазы высокочастотного заполнения. Следует также подчеркнуть, что эти сигналы синхронизированы во времени. Такая ситуация характерна для когерентного приема. Мешающие сигналы других абонентов ![]() приходят на вход приемника со случайными амплитудами
приходят на вход приемника со случайными амплитудами ![]() и временем задержки
и временем задержки ![]() .
.
Обработка принимаемого сигнала (2.13) в приемном устройстве состоит, во-первых, в перемножении с копией сигнала Sk(t) и, во-вторых, в последующем интегрировании полученного произведения на интервале длительности сигнала Т. Можно записать
 . (2.14)
. (2.14)
В этом выражении, кроме полезной составляющей ![]() , равной энергии полезного сигнала на входе приемника, содержится шумовая составляющая
, равной энергии полезного сигнала на входе приемника, содержится шумовая составляющая ![]() и помеховая
и помеховая
![]() . (2.15)
. (2.15)
Помеховая составляющая характеризует внутрисистемные помехи и определяется значениями взаимной корреляционной функции между полезным и мешающим сигналами при случайной задержке τр:
![]() . (2.16)
. (2.16)
Однако в § 2.1 было определено, что помехоустойчивость определяется базой сигналов (2.2), но не зависит от их корреляционных функций. Это объясняется введенными там предположениям: внутрисистемные помехи нормализуются, а их спектральная плотность мощности в общей полосе частот принята равномерной. Ни то, ни другое предположение обычно не выполняется, и тогда корреляционные характеристики систем сигналов являются определяющими при решении вопроса о помехоустойчивости передачи информации в ААСС.
Следует обратить внимание, что выражение (2.16) определяет взаимные корреляционные функции (ВКФ). Именно характеристики ВКФ определяют помехоустойчивость связи. При этом асинхронный принцип работы абонентов предопределяет случайность времени задержки τр. Но ортогональность сигналов может обеспечиваться только в точке, т.е. при определенном временном сдвиге. При случайных сдвигах τр значение Rкр(τр), определяемое формулой (2.16), будет отличным от нуля. Поэтому в ААСС основной задачей является выбор ансамбля не ортогональных сигналов, а таких, которые обладают «хорошими» взаимными корреляционными функциями; при этом критерием качества ВКФ является обеспечение максимальной помехоустойчивости. Исследования, проведенные в /2/, показали, что реальные системы сигналов дают вероятность ошибки большую, чем для случая нормализации взаимных помех. Увеличение вероятности ошибки (или проигрыш в отношении сигнал/помеха) существенно зависит от выбора системы сигналов.
Значения ВКФ Rкр(τр) являются случайной величиной, так как τр - случайный сдвиг во времени. Кроме того, помеховая составляющая (2.15) определяется не только значениями ВКФ, но и уровнями сигналов ![]() , которые также можно считать случайной величиной. Случайность усиливается еще и тем, что число одновременно работающих абонентов тоже является случайным со средним значением, равным
, которые также можно считать случайной величиной. Случайность усиливается еще и тем, что число одновременно работающих абонентов тоже является случайным со средним значением, равным ![]() , а также и тем, что в силу случайности τр копия сигнала может перекрываться с различными сигналами мешающего абонента, которые представляют символы «1» и «0» информации этого абонента. В результате имеют место различные взаимно корреляционные функции /18/:
, а также и тем, что в силу случайности τр копия сигнала может перекрываться с различными сигналами мешающего абонента, которые представляют символы «1» и «0» информации этого абонента. В результате имеют место различные взаимно корреляционные функции /18/:
1. Периодическая ВКФ (ПВКФ).
В мешающем сигнале в течение длительности Т следуют одинаковые символы информации. Например, на рис.2.За р-й абонент в

Рис.2.3. Виды ВКФ
интервале интегрирования длительности Т излучает одинаковые сигналы Sp(t), которые представляют либо символы «1», либо символы «0» информации. Получение этого вида ВКФ эквивалентно перемножению копии сигнала Sk(t) с циклическим сдвигом сигнала Sp(t). Этот самый распространенный вид РКФ будет иметь место при любой модуляции при режиме работы и с активной, и с пассивной паузами.
2. Апериодическая ВКФ (АВКФ).
Сигнал Sp(t) следует один, до и после него сигнал отсутствует. Копия сигнала перемножается с отрезком сигнала Sp(t) (рис.2.3б). Этот вид ВКФ характерен для АМ, когда в течение длительности копии сигнала Т происходит смена символа информации р-го абонента.
3. Смешанно-периодическая ВКФ (СВКФ).
Этот вид ВКФ (рис.2.3в) получается при использовании ортогональной модуляции, когда для передачи символов «1» и «0» используются различные сигналы Sp(t) и Sl(t).
4. Меандро – инвертированная ВКФ (МИВКФ).
Этот вид ВКФ получается при использовании противоположных сигналов, когда «1» передается сигналом Sp(t), а «0» - сигналом – Sp(t) (рис.2.2). Если p=k, получаем меандро – инвертированную КФ (МИКФ). Отличие распределения значений ВКФ от гауссовского увеличивает вероятность ошибки /2/. Для получения минимальной вероятности ошибки при мешающих сигналах одного уровня следует выбирать такую систему сигналов, распределение ВКФ которой мало отличается от гауссовского и характеризуется минимальной дисперсией. При наличии мощных сигналов мешающих абонентов минимальную вероятность ошибки обеспечит та система сигналов, которая характеризуется минимальным значением максимальных выбросов.
2.3. Примеры РТС ПИ с РКФ
РКФ с ШПС нашло применение в целом ряде многоканальных систем. Столь широкий интерес к таким системам объясняется прежде всего применением в них широкополосных сигналов, которые определяют важнейшие положительные качества систем с РКФ.
Основным фактором здесь является эксплуатационная гибкость, которая определяется простотой вхождения в связь без поиска свободного канала (частоты), без сложных операций перехода на другой адрес, без ожидания и очереди. Это объясняется тем, что адресными сигналами являются широкополосные сигналы, обычно передаваемые в общей полосе частот, и переход на другой адрес осуществляется изменением логических связей в генераторе сложного сигнала.
Весьма важным является также еще одно свойство систем с широкополосными сигналами - эластичность при перегрузках. Как указано в §2.1, качество связи в основном определяется числом одновременно работающих абонентов, т.е. числом мешающих сигналов на входе приемника. С изменением числа активных абонентов качество связи изменяется: при малом числе активных абонентов получается очень высокое качество, а при увеличении числа активных абонентов качество связи постепенно ухудшается. Именно эта постепенность изменения качества свези и определяет свойство эластичности.
Кроме того, большинство широкополосных сигналов (с большой базой) обеспечивают малую чувствительность приемника к сосредоточенным по спектру и импульсным помехам, а также к помехам, возникающим из-за многолучевого распространения. К тому же использование ШПС обеспечивает некоторую скрытность передачи.
РКФ с ШПС прежде всего находят применение в низовой радиосвязи, где требуется обеспечить связь между большим количеством абонентов, как правило, подвижных /3, 7/. Это – сельская связь, связь внутри города (на стройках, больших предприятиях, в милиции и т.д.).
Весьма перспективным является использование ШПС в спутниковых системах связи, так как в этих системах определяющим является простота обеспечения МСД к спутниковому ретранслятору /7, 14/. Спутник - ретранслятор виден с большой территории земли, может быть использован большим количеством абонентов (земных станций) для ретрансляции их сигналов на большие расстояния. Поэтому вопросы простоты осуществления МСД являются первостепенными. МСД с ШПС можно осуществлять при минимальной координации между отдельными абонентами или группами абонентов.
Впервые РКФ были применены в низовой военной радиосвязи /3, 16/. В 60-х годах в США были разработаны и испытаны системы RACEP, RADEM, RADA и др. Все эти системы характеризуются свободным доступом абонентов в систему.
Это свойство отмечено первыми двумя буквами в названиях систем: RA – Random Access - случайный доступ. Все эти системы обеспечивают обмен речевой информацией между абонентами. Речевые сигналы преобразуются в цифровую (импульсную) форму с использованием различных видов импульсной модуляции: в системе RACEP используется ФИМ, в системах RADEM и RADA - различные модификация дельта - модуляции. В этих системах используются сигналы с пассивной паузой: «1» информации передаются сигналом S(t), а при «0» информации - излучение сигнала отсутствует. В качестве сигнала используется так называемая адресная группа импульсов, этот сигнал является одновременно адресом, указывающим, кому предназначено сообщение. Адресные группы состоят из последовательности n коротких импульсов (n=3,4). Адресные группы различных абонентов различаются
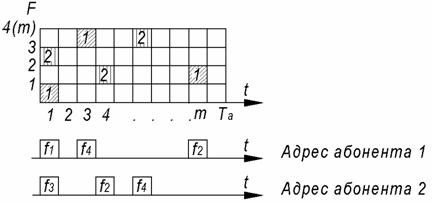
Рис.2.4. Процесс формирования адресных групп импульсов с помощью ЧВМ
временными интервалами между импульсами, каждый импульс передается на своей частоте (всего частот m, m>n). Принцип формировании адресных групп поясняется на рис.2.4. Время Та, отведенное для передачи адресной группы, разделяется на S позиций, а полоса частот f на m частотных каналов. Пространство время – частота, отведенное для формирования адресного сигнала, называется частотно – временной матрицей (ЧВМ). Адреса абонентов располагаются по различным ячейкам ЧВМ. На рисунке представлены два различных адреса, которые отличаются друг от друга время - частотными интервалами. На рис.2.5 поясняется принцип формирования сигнала одного абонента, при этом используется адресная группа того абонента, кому предназначено сообщение.
Сигналы ЧВМ являются частным случаем широкополосных сигналов: это АМ-ДЧ-сигналы. База этих сигналов невелика, она определяется произведением длительности Та на ширину спектра F и по величина равна размеру матрицы ![]() .
.
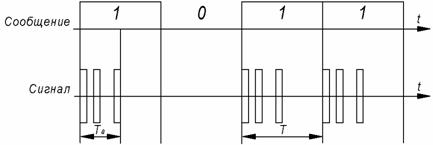
Рис.2.5. Сообщение и сигнал в системе с ЧВМ (импульсы в группе передаются на различных частотах)
Схема формирования сигнала в передатчике представлена на рис.2.6. Обычно используется дискретная линия задержки. Габариты
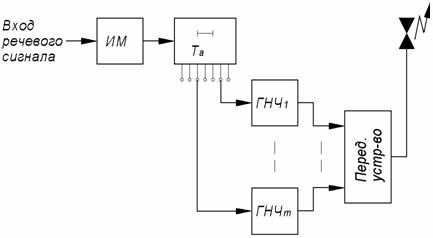
Рис.2.6. Передающее устройство ААСС с ЧВМ (ИМ - импульсный модулятор, ГНЧ - генератор несущей частоты)
передатчика определяются, в основном, выходными каскадами т.е. мощностью, которую надо излучить, чтобы обеспечить связь на заданное максимальное расстояние. Обработка сигналов в приемнике проводится с помощью квазиоптимального метода, который иногда называют, нелинейной согласованной фильтрацией /7/. Структурная схема приемника представлена на рис.2.7.
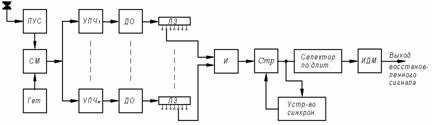
Рис.2.7. Структурная схема приемного устройства ААСС с ЧВМ
Приемник содержит m трактов УПЧ, в которых проводится разделение импульсов адресной группы в соответствии с их частотами. В каждом тракте стоит детектор огибающей (ДО), после которого сигнал подается на линию задержки с отводами. Линия задержки предназначена для выравнивания по задержке импульсов адресной группы из различных частотных трактов. Отводы линии задержки устанавливаются так, чтобы импульсы определенной адресной группы совместились во времени на входе последующей схемы совпадения (И). Именно переключением отводов линии задержки осуществляется переход приемника на другой адрес. Схема И фиксирует наличие определенной адресной группы на входе приемника, т.е. фактически наличие «1» в принимаемом сообщении.
На входе приемника кроме полезного сигнала действуют мешающие сигналы всех работающих в данный момент абонентов системы. Поток мешающих импульсов несколько разрежается в частотных трактах. Но ложные срабатывания схемы И за счет мешающих сигналов все же будут происходить и на выходе эти ложные срабатывания будут проявляться в виде помехи (внутрисистемная помеха). Первые разработки и испытание этих систем показали, что внутрисистемные помехи имеют довольно большой уровень, который прежде всего зависят от числа «1» в сообщении, т.е. от плотности потока адресных групп в сигнале каждого абонента. Дня уменьшения этой плотности используются различные модификации дельта - модуляции речевых сообщений с пониженным числом «1» на выходе модулятора /3/.
Уменьшение внутрисистемных помех можно также получить, если учитывать статистические свойства потоков полезных и мешающих импульсов: полезные импульсы на выходе схемы И обычно имеют приблизительно одинаковую длительность и следуют с интервалами lT , l - целое число, а мешающие импульсы следуют со случайными интервалами и имеют случайную длительность, при этом коротких импульсов будет больше. На этом отличии мешающего и полезного потоков импульсов и основана селекция мешающих импульсов, которая реализуется в виде стробирования (Стр) и селекции по длительности (рис.2.7). Для работы первого блока требуются стробирующие импульсы, которые вырабатываются устройством синхронизации. Выделение сигнала синхронизации осуществляется, как правило, по полезному потоку импульсов: здесь учитывается его квазипериодичность, и полезный сигнал выделяется с помощью накопления.
Добавление блоков синхронизация, стробирования и селекции по длительности усложняет приемное устройство, но это в большинстве случаев необходимо, так как в противном случае получаем очень низкое качество связи.
Все эти системы работают по принципу радиотелефона. Абоненты вступают в связь по мере надобности. Адреса устанавливаются с помощью обычного номеронабирателя. Адресная группа является одновременно и вызывным сигналом. Приемники всех абонентов обычно находятся в режиме дежурного приема на своем адресе. При фиксации наличия нескольких следующих подряд адресных групп приемник формирует световой или звуковой вызывной сигнал. Между абонентами устанавливается дуплексная связь.
Такой принцип позволяет организовать связь в системе с любым числом абонентов: число абонентов будет, прежде всего, определять размер матрицы Sּm. Эти системы использовались для связи в воинских подразделениях от батальона (связь между солдатами и командиром) до дивизии (связь между штабами). Исполнение станций было различным: от карманного варианта (приемопередатчик размещался в каске солдата) до мобильного. Различались эти станции в основном мощностью передатчика, т.е. радиусом действия. Принцип же работы их в различных вариантах был одинаковым.
Приведем основные технические характеристики этих систем /3/:
число абонентов в системе - 700,
среднее число активных абонентов - 35,
число импульсов в адресе - 3,
число временных позиций ЧВМ - 16,
число частотных позиций - 3,
диапазон частот - УКВ,
радиус действия - 3![]() 15 км.
15 км.
Испытания систем типа RADA показали, что подобный принцип организации связи является очень перспективным. Однако используемые сигналы и принципы их формирования и обработки не обеспечивают надежную связь при сосредоточенных по спектру и импульсных помехах. В настоящее время сигналы ЧВМ имеют очень ограниченное применение. Но положительные свойства принципа организации связи, основанного на использовании адресных сигналов в общей полосе частот, были подтверждены и определили более широкое использование этого принципа в будущих разработках, но уже с другими сигналами, в частности, с ФМ сложными сигналами.
Принципы построения спутниковых систем связи определяют их отличительные особенности, важнейшими из которых являются:
1. Ретрансляция большого количества сигналов земных станций, расположенных на больших расстояниях друг от друга.
2. Нелинейная характеристика усилителя ретранслятора.
3. Доступность ретранслятора помехам.
Стремление упростить бортовую аппаратуру привело к применению пассивных ретрансляторов. На рис.2.8 представлена структурная схема одноствольного ретранслятора /14/.
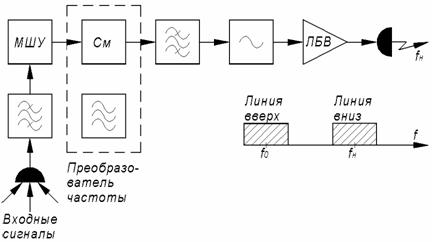
Рис.2.8. Упрощенная структурная схема одноствольного ретранслятора (МШУ - малошумящий усилитель)
Множество сигналов, поступающих на ретранслятор в полосе частот с центральной частотой fв, появляются на выходе ретранслятора в полосе частот с центральной частотой fн. Входная и выходная полоса частот ретранслятора разносятся достаточно далеко друг от друга, чтобы предотвратить возможность самовозбуждения ретранслятора. На рис.2.8 показано только одно преобразование частоты. На практике используется предварительное преобразование в сигналы промежуточной частоты, а затем производится повышающее преобразование в сигналы частоты передачи.
Большинство спутников связи содержит несколько (четыре и более) параллельных ретрансляторов с несколькими узконаправленными антеннами, чтобы облегчить проблему многостанционного доступа, особенно при сильном различии уровней принимаемых сигналов для различных классов потребителей.
Выходной усилитель мощности обычно реализуется на ЛБВ которая имеет нелинейную амплитудную характеристику. Это необходимо учитывать при ретрансляции сигналов многих земных станций. Если входные сигналы земных станций не будут выходить за пределы линейного участка характеристики выходного усилителя, то мощность ретранслятора будет использоваться не полностью и уровень средней мощности, приходящийся на каждый сигнал при ретрансляции, будет пропорционален уровню соответствующего сигнала на входе, т.е. слабые сигналы будут иметь и малую мощность. Это не всегда желательно при обеспечении МСД.
Если сигналы земных станций выводят ЛБВ на нелинейный участок характеристики, то возникают большие перекрестные помехи, на излучение которых тратится мощность передатчика ретранслятора. Кроме того, в ЛБВ происходит перераспределение мощностей сигналов земных станций в пользу мощных сигналов. Все это определяет также неэффективное использование мощности ретранслятора. К тому же следует учесть, что мощность ретранслятора тратится также на излучение помех, которые действуют на трассе земля-спутник.
Использование традиционных методов объединения сигналов земных станций на основе ВРК и ЧРК усложняет систему в целом. Так, при ВРК необходима общесистемная синхронизация, а при ЧРК требуется выравнивание мощностей земных станций, поступающих на вход ретранслятора. Все это реализуется довольно сложно при негеостационарной орбите.
В процессе исследования возможности МСД к спутниковому ретранслятору в США были разработаны и испытаны несколько систем с РКФ /7/.
Первой такой системой была экспериментальная спутниковая система связи с многопозиционным доступом до 40 земных станций через ретранслятор LES-2 (Lincoln Еxperimental Satellite), созданный в Линкольновской лаборатории Массачусетского Технологического института. В качестве сообщений земных станций использовались сигналы вокодера (4,8 кбит/с) и телетайпа (0,2 кбит/с). Двоичные символы сообщения длительностью 200 мкс кодируются в сверточном кодере. Передача информации осуществляется с использованием многопозиционного сигнала. Напомним, что многопозиционные сигналы требуют меньших затрат по сравнению с двоичными. Многопозиционные сигналы представляют собой отрезки гармонических колебаний с различными частотами: для передачи комбинаций из четырех информационных символов используется группа из 16 частот. Положение группы из 16 частот меняется по определенной программе для каждой четверки информационных символов. Частотный синтезатор земных станций вырабатывает 4096 частот с интервалом между ними 5 кГц. Программа перестройки группы из 16 частот по этим частотам и является адресом сообщения. Такое изменение несущей частоты от сигнала к сигналу называется принципом «прыгающей частоты». Спутник на геостационарной орбите работал в режиме переизлучения сигнала. Предполагалось, что случайное расположение 16 частот по 4096 возможным частотам уменьшает в среднем перекрестные помехи, которые возникают при усилении многочастотного сигнала нелинейным усилителем.
Развитие этого метода асинхронной связи привело к созданию аппаратуры TATS (Tactical Satellite Communication - тактическая система связи), которая испытывалась с более совершенными спутниками серии LES.
В этой системе адресом является также закон изменения несущей частоты. Также используются многопозиционные сигналы, но сами сигналы формируются несколько иначе. Каждый сигнал, представляющий 6 бит информации, передается последовательностью из 8 символов. Первый символ является синхронизирующим, он излучаемся для данной земной станции на частоте, относительно которой смещаются частоты остальных символов. Они передаются на различных частотах (всего 8 поднесущих частот), отличающихся друг от друга на 2Δf. Всего используется 64 кодовых слова, отличающихся друг от друга смещениями частот между символами. Любые два кодовых слова имеют не более чем один одинаковый элемент, не считая синхроимпульса.
Прием такого сигнала осуществляется по параллельным каналам с согласованной фильтрацией на промежуточной частоте. Для каждого элементарного импульса проводится измерение и квантование значения огибающей. Далее декодирующее устройство выносит решение, какое из 64 кодовых слов было передано.
Для адресации передаваемого сообщения, а также для распределения энергии сигнала равномерно по полосе частот общего тракта передачи за каждым абонентом (земной станцией) закреплен определенный закон изменения «прыгающей частоты». Несущая частота радиоимпульсов получается в результате сложения «прыгающей частоты» с частотным сдвигом элементарного импульса относительно частоты синхронизирующего импульса кодового слова. Цикл изменения «прыгающей частоты» равен 7 элементарным импульсам, поэтому радиоимпульсы кодового слова будут передаваться на разных частотах в пределах полосы частот системы.
В режиме дежурного приема аппаратура данной станции осуществляет непрерывный поиск по частоте и во времени частотно-временной комбинации, закрепленной за данной станцией, Для обнаружения и вхождения в синхронизм начальная часть передаваемого сообщения содержит около 500 элементарных импульсов с соответствующим изменением несущей частоты. Интервал поиска во времени равен 7 элементарным импульсам, а по частоте - ![]() 400 Гц. Время вхождения в связь при малой скорости передачи (75 бит/с) равно 5 с, а при большой (2400 бит/с) - 0,16 с.
400 Гц. Время вхождения в связь при малой скорости передачи (75 бит/с) равно 5 с, а при большой (2400 бит/с) - 0,16 с.
В литературе сообщалось о надежной дуплексной связи самолет - спутник LES-6 - земля при скорости 2400 бит/с при одновременной передаче по тому же тракту связи с полосой 500 кГц 12 имитируемых сигналов с той же скоростью.
Современное состояние техники и надежда на будущий прогресс позволяют сделать предположение о возможности использование более сложного ретранслятора с обработкой сигналов на борту. Это позволит повысить эффективность использования полосы частот и мощности спутника/7/. Обработка сигналов на борту целесообразна, когда на линии земля-спутник присутствуют помехи и в других случаях. Структурная схема ретранслятора с обработкой на борту представлена на рис.2.9. На борту проводится демодуляция сигналов, изменение структуры сигналов, формирование нового группового сигнала и его усиление
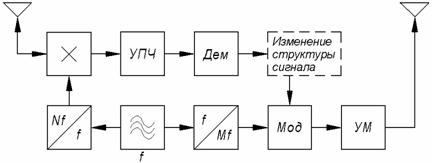
Рис.2.9. Упрощенная структурная схема ретранслятора с обработкой сигналов на борту
Широкое применение в настоящее время в низовой мобильной радиосвязи получила сотовая связь. В рамках данного учебного пособия не представляется возможным дать подробное описание принципа построения сотовых систем связи и полного алгоритма функционирования систем, использующих кодовое разделение каналов, которые приведены в многочисленной литературе (см., например /6/).
Ниже приводятся сведения, касающиеся преимуществ кодового разделения каналов по сравнению с другими методами, и дано краткое описание прямого канала системы cdmaOne.
Системы сотовой связи – это системы с множественным доступом (многоканальные). Их основные параметры зависят от технологии распределения имеющегося частотно – временного ресурса между отдельными каналами.
На сегодняшний день системы FDMA и TDMA (соответственно с частотным и временным разделением каналов) практически исчерпали свои возможности и не могут обеспечивать высокую пропускную способность.
Радикальным решением эволюции сотовых систем связи благодаря высокой спектральной эффективности является технология кодового разделения каналов CDMA.
Как уже было отмечено выше, при кодовом разделении каждый из каналов системы полностью использует весь выделенный частотно – временной ресурс; радиоканалы перекрываются как по времени, так и по частоте. Разделение каналов осуществляется за счет того, что каждый канал имеет свою «поднесущую» - адресную кодовую последовательность. В результате этого взаимные помехи определяются не частотной и временным положением сигналов, а корреляционными свойствами адресных последовательностей.
Снижение уровня взаимных помех и увеличение пропускной способности достигается также автоматическими регулировками мощности (АРМ) передатчиков мобильной станции (МС) и базовой станции (БС). Так как радиоканалы перекрываются по времени и частоте, то при существенном различии сигналов в точке приема более сильные сигналы одних абонентов будут маскировать более слабые сигналы других, что приведет к потере связи и, как следствие, к резкому снижению пропускной способности сети. АРМ позволяет существенно нивелировать этот эффект.
В целях максимального эффективного использования ресурса системы в сетях применяют динамическое распределение каналов, при котором рабочие каналы закрепляют не за абонентами, а за вызовами.
При технологии CDMA выполняется ряд условий: расширение базы посредством кода, кодовая синхронизация, применение оптимальных кодовых последовательностей, уровень помех в системе не выше порогового.
Для расширения базы исходный узкополосный сигнал умножают на псевдослучайную знакопеременную последовательность (ПСП), состоящую из N элементов (чипов) длительностью τ каждый и имеющую период повторения T=N·τ (в этом случае база сигнала B=N). Свойства некоторых часто используемых на практике ПСП, рассмотрены ниже в главе 3.
Выбор кодовых последовательностей для систем CDMA зависит от типа канала: прямой (от БС к МС) или обратный (от МС к БС). В прямом канале связи поддерживают тактовую и кадровую синхронизацию адресных последовательностей рабочих каналов одной МС. Синхронизацию обеспечивают при формировании группового сигнала в передающем тракте БС. Сигналы от БС поступают на вход приемника МС без взаимных временных сдвигов, поскольку в пределах одного луча все они проходят одинаковое расстояние. В результате этого на входе приемника МС сохраняется режим тактовой и кадровой синхронизации адресных последовательностей рабочих каналов, а значит можно использовать синхронную обработку группового сигнала. Поэтому для минимизации межканальных помех возможно применение ансамблей ортогональных сигналов (например, ансамбль функций Уолша).
В обратном канале ситуация иная: у адресных последовательностей рабочих каналов МС временные сдвиги произвольные, т.е. имеет место асинхронный режим работы МС. Поэтому в нем нужен ансамбль сигналов с хорошими корреляционными свойствами: максимальный уровень выбросов ВКФ и боковых лепестков АКФ должен быть как можно меньше.
В наибольшей степени этим требованиям удовлетворяет бинарные коды на основе М-последовательностей (см. главу 3). В основном их применение обусловлено хорошими свойствами периодических автокорреляционных функций (ПАКФ). Уровень боковых лепестков ПАКФ таких кодов постоянен и равен по модулю 1/N. Очевидно, что при достаточно больших длинах таких ПСП можно добиться сколь угодно малой величины бокового лепестка. Это свойство ПАКФ позволяет выделять отдельные лучи из общей интерференционной картины при многолучевом распространении радиоволн, а также с высокой точностью поддерживать кодовую синхронизацию в системе связи.
Правильный выбор ПСП наделяет систему CDMA рядом уникальных свойств.
Каждый рабочий канал имеет свои адресные последовательности, причем сигналы соседних каналов воспринимаются при приеме как белый шум, уровень которого можно снижать, увеличивая базу сигналов. Они обладают эластичностью, могут работать в одном диапазоне с другими радиотехническими средствами. При этом возможно соблюдение требований полной электромагнитной совместимости за счет малой спектральной плотности энергии широкополосных сигналов.
В системах CDMA практически исключается несанкционированный доступ в сеть.
Системы CDMA позволяют существенно увеличить пропускную способность за счет фактора речевой активности абонентов. В зависимости от параметров речи абонента при кодировании из речевого сигнала удаляют избыточность и кодированную информацию передают с различной скоростью, поддерживая энергию посылки одного символа неизменной. В целом эти меры дают возможность увеличить пропускную способность системы примерно в два раза.
Разработчиком первого в мире действующего стандарта мобильной сотовой связи на основе CDMA является фирма QUALCOMM (коммерческое название cdmaOne). Система cdmaOne рассчитана на работу в диапазоне 800 МГц; общая полоса частот канала связи составляет 1,25 МГц.
Прямой канал системы cdmaOne состоит из одного пилотного канала, одного канала синхронизации и 62 других каналов. Эти 62 канала могут быть полностью использованы для передачи прямого трафика, однако до семи из них можно использовать и в качестве каналов персонального вызова.
Для разделения каналов служат кодовые ФМ – последовательности, сформированные на базе ортогональных функций Уолша. Адресная последовательность W0 (константа) предназначена для организации пилотного канала, а адресная последовательность W32 (меандр) – для организации канала синхронизации. Каналы персонального вызова и прямого трафика используют другие 62 адресные последовательности. Еще раз надо обратить внимание на то, что в прямом канале связи функции Уолша используются для кодового разделения рабочих каналов (в обратном канале связи их функциональное назначение будет принципиально другим).
Как видно из рис.3.10, в предающем тракте БС перенесение сигналов в каналах на адресные поднесущие производят в 2 этапа. На первом этапе последовательность информационных символов модулирует (операция «сумма по модулю 2») адресную ФМ - последовательность на основе функций Уолша (Wi) с тактовой частотой 1,288 Мчип/с. На втором этапе полученный поток скремблирует («сумма по модулю 2») псевдослучайные ФМ – последовательности PN1 и PNQ в синфазном (I) квадратурном (Q) каналах. Эти псевдослучайные последовательности не совпадают между собой и являются известными М-последовательностями. Они одинаковы для всех 64 каналов и имеют тактовую частоту 1,2288 Мчип/с.
Рис.3.10. Структурная схема передающего тракта БС.
Поскольку в пилотном канале используют функцию Уолша W0 (константу), то адресную последовательность в нем фактически определяют квадратурные ПСП PN1 и PNQ.
В канал синхронизации данные поступают со скоростью 1200 бит/с. После сверточного кодирования (9, 1/2) их скорость возрастает до 2400 символов/с. Затем информация поступает на устройство повторения, и на его выходе поток имеет скорость 4800 символов/с.
Далее следует процедура блокового перемежения, в ходе которой информацию перемежают в пределах кадров 20 мс. Перемежение применяют для преобразования пакетов ошибок, возникающих при передаче в канал связи, в одиночные ошибки. Это позволяет уменьшить вероятность ошибки при декодировании информации.
На выходе перемежителя скорость потока по-прежнему составляет 4800 символов/с. После проведения «подготовительных» операций информация поступает на модулятор последовательностей Уолша. Каждый символ на входе модулятора имеет длительность, равную четырем периодам последовательности Уолша: ![]() (64 - количество чипов на периоде функции Уолша, или длина кода). Очевидно, что на выходе модулятора тактовая частота потока также будет 1.2288 Мчип/с.
(64 - количество чипов на периоде функции Уолша, или длина кода). Очевидно, что на выходе модулятора тактовая частота потока также будет 1.2288 Мчип/с.
Для передачи речи по каналам прямого трафика стандартом предусмотрено использование вокодера CELP с переменной скоростью преобразования 8550, 4000, 2000 или 800 бит/с в зависимости от параметров речи абонента. Информацию в каналах трафика передают кадрами по 20 мс. При этом скорость передачи кодированной речевой информации, поступающей в канал, постоянна в течение кадра и составляет 9600, 4800 2400 или 1200 бит/с. Сверточныи кодер с длиной кодового ограничения 9 и скоростью 1/2 удваивает скорость потока: 19200, 9600, 4800 или 2400 символов/с на выходе, соответственно. Для выравнивания скорости потоков кодированной речевой информации применяют устройство повторения; данные на его выходе всегда следуют со скоростью 19200 символов/с. Чем больше кратность повторения символов, тем меньшую мощность используют для их передачи по каналу связи при фиксированной суммарной энергии посылки исходного символа. Это позволяет уменьшить уровень взаимных помех в системе и увеличить пропускную способность сети.
При приеме МС заранее неизвестны скорость передачи информации и кратность повторения символов в текущем кадре. Поэтому декодер МС предпринимает 4 попытки декодирования принятой посылки с четырьмя возможными скоростями передачи и кратностями повторения. Истинную скорость передачи определяют по минимуму обнаруженных декодером ошибок.
Длинный код (на основе М-последовательности длиной 242-1 (![]() 4,4·1012)) несет информацию об индивидуальном номере абонента в сети. Маска, необходимая для генерирования длинного кода, записана в ПЗУ МС. Тактовая частота при генерировании длинного кода – 1,2288 Мчип/с, но устройство децимации (на pис.3.10 не показано) понижает тактовую частоту до 19200 бит/с, оставляя лишь каждый шестьдесят четвертый символ в последовательности. Модифицированный длинный код с выхода дециматора поступает на один вход скремблера; на другой вход со скоростью 19200 символов/с поступает информация с выхода блокового перемежителя. Скремблер производит операцию «сумма по модулю 2» над входными потоками информации. Следует отметить, что скремблирование информации длинным кодом является еще и мощным криптографическим средством, обеспечивающим высокую степень конфиденциальности передаваемых сообщений.
4,4·1012)) несет информацию об индивидуальном номере абонента в сети. Маска, необходимая для генерирования длинного кода, записана в ПЗУ МС. Тактовая частота при генерировании длинного кода – 1,2288 Мчип/с, но устройство децимации (на pис.3.10 не показано) понижает тактовую частоту до 19200 бит/с, оставляя лишь каждый шестьдесят четвертый символ в последовательности. Модифицированный длинный код с выхода дециматора поступает на один вход скремблера; на другой вход со скоростью 19200 символов/с поступает информация с выхода блокового перемежителя. Скремблер производит операцию «сумма по модулю 2» над входными потоками информации. Следует отметить, что скремблирование информации длинным кодом является еще и мощным криптографическим средством, обеспечивающим высокую степень конфиденциальности передаваемых сообщений.
Скремблированные данные мультиплексируют с информацией о регулировании мощности передатчиков МС: определенные символы потока данных на входе мультиплексора заменяют битами команд регулировки мощности.
После мультиплексирования информация со скоростью 19200 символов/с поступает на кодовый модулятор. Номер функции Уолша, применяемой в адресной последовательности, однозначно определяет номер канала трафика данной БС. С выхода модулятора сложный сигнал с тактовой частотой 1,2288 Мчип/с направляют в квадратурные каналы (I и Q), где он скремблирует ПСП, применяемые во всех 64 каналах.
Последняя группа каналов - каналы персонального вызова. Они служат для передачи МС системной информации и команд управления. При вызове, исходящем от МС, когда она производит запрос по каналу доступа о предоставлении ей канала трафика, БС подтверждает запрос и передает команду настроиться на выделенный канал прямого трафика. Для этого также используют каналы персонального вызова. За несколькими исключениями структура канала персонального вызова повторяет структуру 'канала прямого трафика. Различия состоят в том, что данные в каналы вызова поступают со скоростью 9600, 4800 или 2400 бит/с, информацию в них не мультиплексируют с командами регулировки мощности и, наконец, используют другую маску длинного кода.
Сформированные в прямом канале связи квадратурные составляющие сигналов во всех 64 CDMA-каналах затем объединяют и суммируют с весами в режиме линейного сложения. Синфазную и квадратурную компоненты получившегося группового сигнала фильтруют в основной полосе частот и подают на схему 4-позиционной фазовой манипуляции ФМ-4, где видеосигнал переносят на промежуточную частоту.
Манипулированный групповой сигнал на промежуточной частоте затем переносят с промежуточной частоты на несущую, подают на линейный усилитель мощности, и через полосовой фильтр направляют к передающей антенне БС.
Пилотный сигнал, непрерывно излучаемый БС, выполняет несколько функций. Уровень мощности сигнала, излучаемого в пилотном канале, постоянен и на 4...6 дБ выше, чем в каналах трафика. MС - использует пилотный сигнал для захвата несущей частоты, после чего отслеживает его с точностью до фазы и выделяет опорное колебание, необходимое для когерентной обработки сигналов данной БС при приеме. Измеряя мощность пилотных сигналов БС, МС может использовать полученные данные при эстафетной передаче, а также при регулировании мощности передатчика.
Адресная последовательность пилотного канала (короткий код) представляет собой ПСП PN1 и PNQ, каждая из которых является М-последовательностью с длиной 215 (32768) и периодом повторения
 .
.
Все БС в системе используют один короткий код, но с разными циклическими сдвигами. По циклическому сдвигу короткого кода можно выделять и различать сигналы, излучаемые БС в разных сотах и секторах. Циклические сдвиги имеют равномерный шаг 26 (64) чипа. Таким образом, возможны 29-1=511 различных циклических сдвигов короткого кода относительно положения с условно нулевым сдвигом. Это означает, что даже в районах с микросотовой структурой есть твердая гарантия того, что сигналы разных БС можно различить при приеме. Если сеть содержит более 511 БС, то легко добиться того, чтобы БС с одинаковыми циклическими сдвигами короткого кода не были одновременно в зоне радиовидимости одной МС.
Для обеспечения точности циклических сдвигов стандарт cdmaOne использует концепцию синхронизированных БС. Единое время в системе и высокую стабильность тактовых частот поддерживают с помощью спутниковой системы радионавигации GPS.
RAKE-приемник МС имеет в своем составе 3 параллельных канала корреляционной обработки сигналов и 1 дополнительный, сканирующий канал. После захвата несущей частоты МС обрабатывает посылки в пилотном канале БС, выделяя из принимаемого многолучевого сигнала наиболее мощные компоненты. На этом этапе, этапе поиска сигналов БС, МС использует вспомогательный сканирующий канал. Последующая обработка сигналов трех выбранных лучей в ветвях корреляционного приемника позволяет МС отслеживать данные сигналы в присутствии аддитивных и мультипликативных помех и оценивать с заданной точностью их амплитуды, фазы и временные задержки.
Применение пилотного сигнала и трехканального RAKE-приемника делает возможным когерентный прием сигналов БС с трехкратным временным разнесением и последующим когерентным объединением ветвей. Все это обеспечивает существенный энергетический выигрыш при приеме и, как следствие, высокую помехоустойчивость системы.
Чем больше мощность пилотного сигнала, тем выше качество приема в прямом канале связи. Однако введение большого запаса по мощности в пилотном канале неэкономно расходует частотно-временной ресурс системы и снижает ее пропускную способность.
Измеряя временные задержки сигналов выделенных лучей, МС подстраивает в корреляторах циклические сдвиги опорных ПСП и синхронизируется с БС по короткому коду. После этого МС начинает сканировать канал синхронизации, использующий тот же короткий код, с тем же циклическим сдвигом, что и пилотный канал.
Каналы синхронизации всех БС используют одну функцию Уолша W32 и служат для синхронизации МС с сетью. Скорость передачи данных по каналу синхронизации составляет 1200 бит/с, а длина кадра равна периоду повторения короткого кода (26,66 мс). Поскольку канал синхронизации жестко связан по тактовой частоте и по сдвигу циклического кода с пилотным каналом, МС получает доступ к синхроинформации той БС, на пилотный канал которой она настроилась.
Сообщение канала синхронизации содержит: данные о точном времени в системе; циклический сдвиг короткого кода данной БС; информацию идентификации БС и МС; мощность сигнала в пилотном канале; параметры длинного кода; скорость передачи данных в канале персонального вызова.
Принимая сообщение канала синхронизации, МС получает необходимую информацию для начальной синхронизации с сетью.
По завершении процедур начальной синхронизации МС настраивается на канал персонального вызова. Тем самым она получает доступ к системной информации и может принимать команды управления. Если команды управления с БС не поступают, МС переходит в режим ожидания, продолжая прослушивать канал персонального вызова и поддерживая готовность к установлению соединения.
Скорость передачи информации в канале персонального вызова составляет 9600, 4800 или 2400 бит/с. Маска длинного кода зависит от номера канала вызова и циклического сдвига ПСП в пилотном канале.
МС настраивается на канал персонального вызова, либо перебирая имеющиеся каналы (до семи каналов в полосе 1,25 МГц), либо по команде с БС.
Сообщения в каналах персонального вызова могут быть четырех типов:
заголовок; пейджинг; ордер; назначение каналов.
Система сотовой связи cdmaOne адаптивна. Ее конфигурацию можно выбрать, исходя из конкретных условий развертывания сети. Тип конфигурации передают с помощью четырех сообщений заголовка: параметров системы; параметров доступа; граничного списка; списка каналов CDMA.
Параметры системы несут информацию о конфигурации канала персонального вызова, параметрах регистрации, вспомогательных параметрах при поиске пилотного сигнала и т. д.
Параметры доступа содержат сведения о конфигурации канала доступа MС и некоторые параметры управления.
Граничный список содержит данные, позволяющие ускорить процесс эстафетной передачи - например, циклический сдвиг короткого кода в пилотном канале и другие характеристики БС соседних сот.
Список каналов CDMA позволяет МС узнать расположение тех полос (с шириной 1,25 МГц) частотного плана, в которых размещены каналы персонального вызова.
Пейджинг содержит сообщения (страницы), адресованные одной или нескольким МС. Эти сообщения обычно передают те БС, которые находятся в зоне поиска МС при входящем вызове в сеть. При скорости передачи 9600 бит/с один канал персонального вызова может обеспечить передачу около 180 страниц в течение одной секунды. Соответственно 7 каналов могут передавать около 1260 страниц в секунду.
Ордер охватывает широкий класс сообщений управления конкретными МС. Их используют для подтверждения регистрации МС, для блокировки МС в состоянии сбоя и т. д.
Сообщения о назначении каналов позволяют указать MС выделенный канал трафика, назначить ей другой канал персонального вызова, или передать команду о переключении МС в аналоговую систему сотовом связи.
Информацию в канале персонального вызова можно передавать как в бычном режиме, так и в режиме временного разделения (TDM), когда сообщения, адресованные той или иной МС передают в заранее известных временных интервалах - слотах. Период повторения слотов, предназначенных для одной МС, может находиться в пределах 2...128 с. Положение выделенного ей слота МС узнает при регистрации на БС. Работа в TDM-формате позволяет МС сканировать только нужные слоты, отключаясь в перерывах между ними. Более того, структура сообщений в канале персонального вызова такова, что в большинстве случаев МС достаточно сканировать не весь слот, а лишь его часть. Принятые меры обеспечивают существенную экономию источника питания, когда MС находится в состоянии ожидания.
Каналы прямого трафика служат для передачи сообщений трафика (речь и данные абонентов) и служебной информации (сигнализация) с БС на МС.
Кодированная речевая информация поступает в каналы трафика кадрами по 20 мс. Скорость передачи в зависимости от параметров речи абонента составляет 9600, 4800, 2400 или 1200 бит/с и постоянна в течение кадра. В паузах речи скорость информационного потока автоматически понижают до минимального значения. Передача трафика с адаптивной скоростью минимизирует уровень внутрисистемных помех и повышает пропускную способность сети.
По выделении МС канала трафика сигнализация проходит непосредственно через него. Служебная информация, передаваемая по каналу прямого трафика, может быть четырех типов: сообщения управления вызовом, сообщения управления эстафетной передачей, команды регулирования мощности, информация обеспечения безопасности связи и аутентификации абонентов.
Стандартом предусмотрены 2 возможных режима сигнализации. При первом режиме служебные сообщения передают со скоростью 9600 бит/с так, что кадры системной информации замещают кадры трафика. Второй режим обеспечивает передачу трафика и сигнализацию в одном кадре: преобразование речи в вокодере при этом осуществляют не быстрее, чем 4000 бит/с (4800 бит/с в канале), а оставшийся ресурс используют для сигнализации. Результирующий кадр, таким образом, состоит из двух частей - трафика и служебной информации, а скорость передачи в нем составляет 9600 6ит/с.
2.4. Основная информация
1. Асинхронные адресные системы связи (ААСС) характеризуются наличием внутрисистемная помех, которые обусловлены одновременной работой большого числа абонентов. При одинаковой мощности сигналов на входе приемника взаимные помехи имеют характер гауссовского шума, и помехоустойчивость можно определять по известным формулам. В этих системах должны использоваться широкополосные сигналы (с большой базой), при этом база сигналов приблизительно в ![]() раз должна превышать число активных абонентов, где
раз должна превышать число активных абонентов, где ![]() - отношение энергии сигнала к спектральной плотности шума, обусловленного внутрисистемными помехами, - характеризует качество связи.
- отношение энергии сигнала к спектральной плотности шума, обусловленного внутрисистемными помехами, - характеризует качество связи.
2. Важнейшими характеристиками сигналов, используемых в ААСС, являются их корреляционные функции. Применительно к ААСС следует учитывать корреляционные функции различных видов: периодические, апериодические, меандроинвертируемые, смешанно-периодические и др. Однако отклик приемника на сигналы является случайной функцией их корреляционных функций прежде всего за счет случайности времени задержки сигналов и их уровней, а также вследствие случайности следования символов информации, т.е. сигналов, их представлявших.
4. ААСС характеризуется простотой и оперативностью установления связи, эластичностью и живучестью. Они находят широкое применение в низовой радиосвязи, а также в спутниковых и сотовых системах связи.
2.5. Вопросы для самопроверки и самостоятельной работы
1. Чем можно объяснить, что с увеличением базы сигналов качество связи в ААСС повышается?
2. Можно ли утверждать, что работа в ААСС проводится «под шумом»?
3. Когда может наблюдаться распределение взаимных помех на входе приемника, отличное от гауссовского? При каких применениях и условиях работы это возможно?
4. Несколько вопросов относительно сосредоточенных по спектру помех:
а) как практически можно реализовать, известное теоретическое положение, что широкополосные системы могут работать в условиях мощных сосредоточенных по спектру помех?
б) какие методы борьбы с сосредоточенными по спектру помехами можно предложить?
в) каковы принципы технической реализации этих методов?
г) будет ли меняться уровень сигнала на выходе приемника при использовании устройств защиты от сосредоточенных пo спектру помех?
д) при каких условиях эти устройства применять целесообразно?
е) как изменится сосредоточенная по спектру помеха после обработки ее в корреляторе? в согласованном фильтре?
5. При каких практических ситуациях целесообразно использовать ААСС?
2.6. Задачи
2.1. В ААСС потребовалось увеличить в 2 раза число активных абонентов. Какие меры можно предпринять для сохранения качества связи?
2.2. Определить максимальное число активных абонентов при различных сигналах, если допустимая вероятность ошибки 10-3.
2.3.Оценить минимальную базу сигналов, обеспечивающую вероятность ошибки 10-4 при числе активных абонентов, равном 100.
2.4. Вероятность ошибки 10-3 обеспечивается при базе сигналов В=1000 и числе активных абонентов ка=50, Определить соотношения между внутренними шумами приемника и внутрисистемными помехами.
2.5. В ААСС число активных абонентов ка= 80, база сигналов В=1000, качество связи характеризуется вероятностью ошибок 10-3. Определить, к чему приведет увеличение внутренних шумов в два раза. Как надо изменить параметры системы, если требуется сохранить качество связи?
2.6. Поясните принцип образования периодической корреляционной функции. Вычислите ПКФ для последовательности: 111-11-1-1.
2.7. Вычислить периодическую взаимно корреляционную функцию двух последовательностей: 111-11-1-1 и 111-1-11-1. Сравнить ПВКФ с корреляционной функцией, полученной в предыдущей задаче.
2.8. Поясните принцип образования апериодической корреляционной функции. Вычислить: а) апериодическую автокорреляционную функцию последовательности 111-11-1-1. Сравнить с периодической корреляционной функцией; б) апериодическую ВКФ последовательностей: 111-11-1-1 и 111-1-11-1. Сравнить с корреляционной функцией.
2.9. Пояснить принцип формирования меандроинвертированной КФ. Вычислить меандроинвертированную КФ последовательности III-II-I-I»
2.10. Вычислить меандроинвертированную корреляционную функцию последовательностей: 111-11-11 и 111-1-11-1.
2.11. Вычислить смешанно-периодическую корреляционную функцию при использовании в качестве сигналов последовательностей: 111-111-1 и 111-1-11-1.
2.12. После решения задач 2.6 - 2.11 сравнить все автокорреляционные и смешанно-периодическую корреляционную функции. Сделать вывод, какие функции можно считать «хорошими». Какие КФ имеют наибольшие боковые выбросы?
2.13. После решения задач 2.6 - 2.10 сравнить все взаимные корреляционные функции. Какие максимальные боковые выбросы имеют различные КФ?
3. Сигналы для РТС ПИ с разделением по форме
3.1. Классификация широкополосных сигналов
При выборе ансамбля сигналов для ААСС обычно принимают во внимание следующие свойства широкополосных сигналов:
объем ансамбля и база сигналов,
корреляционные и взаимные корреляционные свойства сигналов,
правило формирования сигналов ансамбля,
техническая реализация генераторов ШПС и устройств их обработки.
В ААСС объем ансамбля сигналов определяется прежде всего числом абонентов в системе. Как указывалось в предыдущих главах, объем ансамбля сигналов должен быть равен числу абонентов или превышать его в 2 раза. При необходимости обеспечения «многоадресности» абонентов (см. §1.1) объем ансамбля должен быть увеличен на порядок и более.
База сигнала, в ААСС обычно значительно превосходящая 1, определяется допустимым уровнем внутрисистемных помех. Как было показано в §2.1, с увеличением базы уровень внутрисистемных помех уменьшается. Кроме того, при большой базе можно обеспечить режим скрытой связи, когда сигнал находится «под шумом». Величина базы определяет также объем ансамбля.
Корреляционные и взаимные корреляционные свойства сигналов - одни из основных характеристик, которые определяют возможность использования того или иного ансамбля сигналов. Взаимные корреляционные функции должны иметь «малые» значения максимальных и боковых выбросов, в некоторых случаях достаточно нормализации распределения значений ВКФ с малой дисперсией. Корреляционные и взаимные корреляционные функции – это временные характеристики сигналов, определяющие степень зависимости сигналов при различных временных сдвигах. Сигналы еще характеризуются частотной корреляционной функцией /2, 16/, определяющей степень связанности сигналов при частотном сдвиге. В пространстве над плоскостью (время-частота) временная и частотная корреляционные функции образуют поверхность, которая называется поверхностью (функцией) неопределенности /16, 18/. Частотные корреляционные функции приобретают очень важное значение при связи с объектами, движущимися с большой скоростью, например, в спутниковых системах связи.
Для обеспечения простоты технической реализации генератора ШПС следует использовать регулярные методы формирования сигналов, т.е. в соответствии с каким-то правилом. Для ААСС важна не только простота технической реализации самого генератора, но и простота и оперативность смены сигнала, перехода на другой адрес.
По характеру изменения сигнала во времени можно разделить ШПС на сигналы с аналоговой и дискретной модуляцией (амплитудной, фазовой, частотной). Среди сигналов с аналоговой модуляцией широко известны сигналы ЛЧМ - с линейной частотной модуляцией, у которых несущая частота в течение длительности Т меняется по линейному закону (рис.3.1). Эти сигналы несложно генерировать, но они имеют малый объем ансамбля: сигналы могут различаться только девиацией частоты. В силу этого ЛЧМ - сигналы в ААСС находят очень ограниченное применение и далее рассматриваться на будут.
Рис. 3.1. ЛЧМ - сигнал
В ААСС широко используются сигналы с дискретной модуляцией - манипулированные по фазе, амплитуде и частоте.
Фазо- и амплитудно – манипулированные сложные сигналы часто формируются с использованием двоичных псевдослучайных последовательностей (ПСП), которые манипулируют по фазе или амплитуде несущую (поднесущую) частоту. На рис. 3.2 представлены примеры АМ и ФМ сложных сигналов. База сигнала B=FT определяется длиной последовательности N. Действительно, спектр сигнала определяется длительностью элемента последовательности F=1/τЭ. В течении длительности сигнала Т укладывается N элементов, т.е. τЭ=T/N и F=N/T, а В=N. На рис. 3.2 в ПСП используется 7 элементов, и база АМ и ФМ сложных сигналов В=7.
В передатчике AM и ФМ сложные сигналы получить довольно просто (рис.3.3.). На один вход перемножителя подается двоичная последовательность с генератора ПСП, а на другой – поднесущая частота. При AM двоичная последовательность представляется в виде последовательности 1 и 0, а при ФМ - двоичная последовательность должна быть преобразована в последовательность символов +1 и -1. Для этих видов сигналов техническая реализация генератора ШПС будет определяться в основном технической реализацией генератора псевдослучайной последовательности.
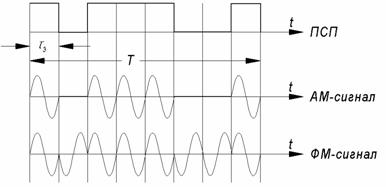
Рис.3.2. АМ- и ФМ – сложные сигналы
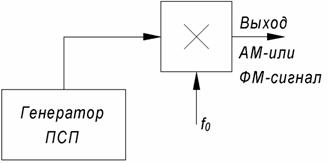
Рис.3.3. Формирователь сложного АМ- или ФМ - сигнала
Корреляционные функции AM и ФМ сложных сигналов определяются корреляционными функциями манипулирующих последовательностей. На рис.3.4 представлен процесс вычисления корреляционной функции AМ и ФМ сложных сигналов, манипулированных двоичной последовательностью 1110010 и сдвинутой на три элемента 0010111 последовательности.
Значения корреляционной функции получаем на выходе интегратора в момент t=T. Как видно из рис.3.4, на выходе перемножителя будут аналогичные сигналы и для манипулированных сигналов, и для ПСП. Отличие будет в абсолютном уровне сигналов. Оно будет проявляться на выходе интегратора в незначительном уменьшении напряжения в момент отсчета t=T для манипулированных сигналов (примерно 20 %). Относительные же соотношения между значениями КФ сохраняются.
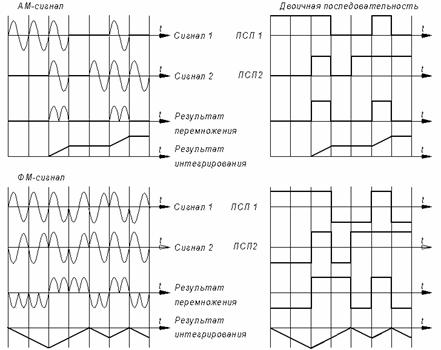
Рис.3.4. Процесс вычисления корреляционных функций сложных сигналов.
Поэтому, рассматривая КФ сложных AM или ФМ сигналов, достаточно анализировать корреляционные функции манипулирующих последовательностей.
Следует также отметить, что для подобных сигналов достаточно вычислить КФ в дискретных точках iτЭ. В остальных точках значения получаются путем соединения вычисленных значений в дискретных точках прямыми линиями.
Фазоманипулированные сложные сигналы находят более широкое применение чем АМ – сигналы в силу более эффективного использования пиковой мощности передатчика и более высокой помехоустойчивости. Поэтому в дальнейшем при рассмотрении ПСП и их свойств ограничимся двоичными последовательностями, состоящими из элементов +1 и -1.
Сигналы с дискретной частотной модуляцией, называемые также дискретно-частотными сигналами (ДЧ – сигналы), получаются в результате скачкообразного изменения частоты несущей по какому-то закону в заданном диапазоне частот. Закон, или программа перестройки частоты, известен на передающей и приемной сторонах. На рис.3.5 представлен один из вариантов ДЧ - сигнала.
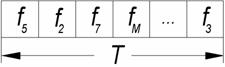
Рис.3.5. Дискретно-частотный сигнал
Сигнал длительностью Т состоит из М элементов, каждый из которых передается на своей частоте. Обычно используются М частот и М временных позиций, элементов сигнала. Основным преимуществом ДЧ - сигнала является получение большой базы при относительно небольшом числе элементов.
В интервале времени Т укладывается М временных элементов; каждый элемент длительности Т/М передается на своей частоте, ширина спектра при этом равна F1=1/τЭ=М/Т.
Весь сигнал имеет спектр в М раз шире, так как используется М различных частот: F=M·F1. База ДЧ - сигнала
![]() . (3.1)
. (3.1)
При числе элементов М=10 база сигнала будет равна В=100, а для получения базы В=103 следует использовать сигнал, состоящий примерно из 30 элементов.
Одна из возможных схем формирования ДЧ - сигнала представлена на рис.3.6 /16/ .
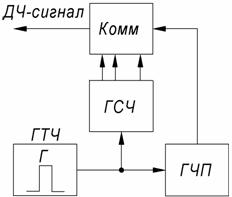
Рис.3.6. Формирователь ДЧ – сигнала
Генератор тактовой частоты (ГТЧ) синхронизирует работу генератора сетки частот (ГСЧ) и генератора числовой последовательности (ГЧП). Генератор числовой последовательности выдает случайную последовательность чисел от 0 до M-1, которые подаются на управляющий вход цифрового коммутатора (Комм); цифровой коммутатор ставит в соответствие каждому числу заранее определенный сигнал сетки частот. Синхронизация генератора сетки частот и генератора числовой последовательности позволяет получить сигнал на выходе цифрового коммутатора без скачков фазы. Сравнение рис. 3.6 и 3.3 показывает, что для формирования ДЧ - сигнала используется более сложное устройство. ДЧ - сигналы изучены недостаточно полно. Для оценки корреляционных свойств ДЧ - сигналов можно привести следующие данные, полученные в /23/. При ограничении выбросов ВКФ и боковых выбросов КФ значением 1/M объем ансамбля сигналов будет небольшим - порядка М. Увеличение объема ансамбля приведет к увеличению боковых выбросов КФ. Однако благодаря положительному свойству обеспечивать большую базу при относительно небольшом числе элементов ДЧ - сигналы привлекают внимание специалистов. Основной проблемой, которая требует своего разрешения является получение большого ансамбля сигналов с «хорошими» корреляционными свойствами.
Для увеличения объема ансамбля с сохранением корреляционных свойств используются комбинированные методы модуляции, например, частотная и фазовая, частотная и амплитудная и т.д. Для получения ДЧ-ФМ сложного сигнала каждый элемент ДЧ - сигнала манипулируется по фазе ПСП длиной N. База сигнала будет B=M2·N, при этом следует ожидать значительного уменьшения значений боковых выбросов.
Итак, в AAСC наибольшее применение находят ФМ сложные сигналы. Поэтому дальнейшее изложение будет касаться двоичных последовательностей, состоящих из элементов +1 и -1. Будут рассмотрены последовательности, которые при относительной простоте генерации позволяют обеспечить большие базы и большие ансамбли с «хорошими» корреляционными свойствами.
3.2. Квазиортогональные двоичные последовательности
Для формирования сложных сигналов используются ортогональные и квазиортогональные двоичные последовательности.
Ортогональные последовательности (Уолша, Хаара, Радемахера и др.) имеют небольшой ансамбль, равный или меньший их длине, и ортогональность только в точке, т.е. при нулевом сдвиге. Их взаимные корреляционные функции имеют большие боковые выбросы. В связи с этим ортогональные последовательности для систем со свободным доступом при разделении по форме находят очень ограниченное применение: их использование возможно только в синхронных адресных системах, а также при комбинационном объединении.
Для систем со свободным доступом целесообразно использовать такие двоичные сигналы, которые имеют минимальные боковые выбросы (см. §2.2, а также /2/). Такие последовательности называются квазиортогональными. Среди квазиортогональных сигналов наибольшее применение нашли так называемые М-последовательности. Свойства этих последовательностей составленных из двоичных элементов, будут подробнее изложены в последующих разделах. Здесь же укажем только на их отличительные особенности. М-последовательности формируются с помощью регистра сдвига с m разрядами, охваченного обратными связями через сумматор по модулю 2 (линейная обратная связь). Обратные связи устанавливаются в соответствии с проверочным полиномом. Проверочные полиномы найдены до степени ![]() . Длина последовательности
. Длина последовательности ![]() , т.е. при небольшом числе разрядов регистра можно получить довольно длинные последовательности. Так, например, при
, т.е. при небольшом числе разрядов регистра можно получить довольно длинные последовательности. Так, например, при ![]() получаем последовательность длиной 1023. Это определяет простоту технической реализации генератора М-последовательности. Кроме того, М-последовательности имеют хорошие периодические корреляционные функции: боковые выбросы ПКФ принимают одно значение, равное -1. Все это обусловило широкое применение М-последовательностей и глубокое изучение их свойств.
получаем последовательность длиной 1023. Это определяет простоту технической реализации генератора М-последовательности. Кроме того, М-последовательности имеют хорошие периодические корреляционные функции: боковые выбросы ПКФ принимают одно значение, равное -1. Все это обусловило широкое применение М-последовательностей и глубокое изучение их свойств.
При установлении нелинейной обратной связи в регистре сдвига с m разрядами получаем нелинейную рекуррентную последовательность длиной ![]() . Эти последовательности позволяют получить очень большие объемы ансамблей:
. Эти последовательности позволяют получить очень большие объемы ансамблей: ![]() . При
. При ![]() ,
, ![]() можно получить 13 последовательностей, а при
можно получить 13 последовательностей, а при ![]() ,
, ![]() более
более ![]() последовательностей. Это их положительное свойство. Однако это сопряжено пока с некоторыми трудностями, связанными с определением вида нелинейной обратной связи. Кроме того, нелинейный характер обратной связи приводит к значительным трудностям при их исследовании. Только этим можно объяснить очень скудные сведения об этих последовательностях.
последовательностей. Это их положительное свойство. Однако это сопряжено пока с некоторыми трудностями, связанными с определением вида нелинейной обратной связи. Кроме того, нелинейный характер обратной связи приводит к значительным трудностям при их исследовании. Только этим можно объяснить очень скудные сведения об этих последовательностях.
Большим классом являются составные двоичные последовательности, которые образуются из двух и более исходных последовательностей. Составные последовательности формируются для увеличения объема ансамбля сигналов, для получения большой длины последовательности, в том числе и при ограничении быстродействия используемых микросхем.
Составные последовательности могут быть образованы из исходных М-последовательностей одинаковой длины для увеличения объема ансамбля. К этим последовательностям можно отнести последовательности Гоулда, сформированные путем поразрядного сложения по модулю 2 М-последовательностей, а также последовательности, сформированые на основе более двух последовательностей (некоторые из них будут рассмотрены ниже). Одна из исходных М-последовательностей может быть меньшей длины (например, при получении последовательностей Касами, которые также подробнее будут рассмотрены).
На рис. 3.7 представлена структурная схема генератора последовательностей Гоулда.
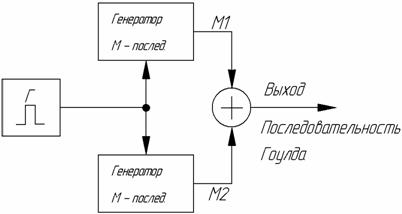
Рис.3.7. Схема формирования последовательностей Гоулда на основе двух М-последовательностей
Все исходные последовательности могут иметь различную длину. Этот метод получения составных сигналов используется для формирования очень длинных последовательностей. Например, последовательность длиной ![]() можно составить из 5 последовательностей с относительно простыми периодами: 25, 27, 29, 31 и 32 /14/. Исходные последовательности могут объединяться с помощью мажоритарного правила (при нечетном числе исходных последовательностей) или поэлементного суммирования по модулю 2. Составные последовательности, образованные по такому принципу, обеспечивают малое время поиска, быстрое вхождение в синхронизм. Но они имеют большие боковые выбросы на периодах исходных последовательностей. Для передачи информации в системах с разделением по форме сигналов эти последовательности могут найти ограниченное применение.
можно составить из 5 последовательностей с относительно простыми периодами: 25, 27, 29, 31 и 32 /14/. Исходные последовательности могут объединяться с помощью мажоритарного правила (при нечетном числе исходных последовательностей) или поэлементного суммирования по модулю 2. Составные последовательности, образованные по такому принципу, обеспечивают малое время поиска, быстрое вхождение в синхронизм. Но они имеют большие боковые выбросы на периодах исходных последовательностей. Для передачи информации в системах с разделением по форме сигналов эти последовательности могут найти ограниченное применение.
Для увеличения длины последовательности при ограниченном быстродействии микросхем можно использовать сложение исходных М-последовательностей со сдвинутыми тактовыми интервалами /4/.
На рис.З.8а представлена схема формирования таких последовательностей на основе двух М-последовательностей, а на рис.3.86 - последовательность, полученная путем сложения двух М-последовательностей одинаковой длины ![]() . Длина вновь образованной последовательности будет в два раза больше
. Длина вновь образованной последовательности будет в два раза больше ![]() .
.
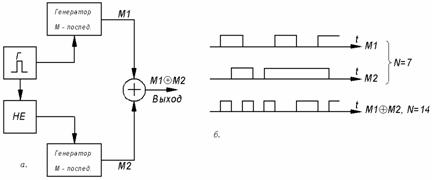
Рис.3.8. Принцип формирования длинных последовательностей при ограниченном быстродействии микросхем
Особое положение занимают последовательности Баркера, которые имеют хорошие апериодические КФ: уровень боковых выбросов при любой длине не превышает 1. Однако эти последовательности имеют небольшую длину (известны последовательности Баркера длиной 3,4,5,7,9,11,13). Для каждой длины существует одна последовательность. С учетом циклических сдвигов объем ансамбля равен длине последовательности. И длина, и объем ансамбля явно недостаточны для использования этих последовательностей в РТС со свободным доступом и РКФ.
3.3. М-последовательности и их свойства
М-последовательности находят широкое применение для формирования широкополосного сигнала. Они используются сами непосредственно для модуляции несущей или на их основе формируются двоичные последовательности, называемые составными /2/. Это обусловлено прежде всего тем, что М-последовательности имеют очень хорошие ПКФ и генерируются с помощью простой схемы: m - разрядного регистра, охваченного обратной связью через сумматор по модулю 2. Причем длина последовательности, определяемая как ![]() , практически не ограничена: известны М-последовательности длиной до
, практически не ограничена: известны М-последовательности длиной до ![]() . Из всех двоичных последовательностей М-последовательности наиболее полно изучены. Рассмотрим подробнее их свойства и характеристики.
. Из всех двоичных последовательностей М-последовательности наиболее полно изучены. Рассмотрим подробнее их свойства и характеристики.
М-последовательности называют также последовательностями максимальной длины, последовательностями сдвигового регистра, линейными рекуррентными последовательностями. Длина последовательности ![]() . Это максимальная длина, которую можно получить с помощью регистра сдвига с m разрядами с линейной обратной связью.
. Это максимальная длина, которую можно получить с помощью регистра сдвига с m разрядами с линейной обратной связью.
Каждая М-последовательность характеризуется проверочным полиномом ![]()
![]() ,
,
который определяет проверочное уравнение
![]() , (3.2)
, (3.2)
или
![]() . (3.3)
. (3.3)
В выражениях (3.2) и (3.3) суммирование проводится по модулю 2, коэффициенты ![]() могут принимать значения 0 или 1. Выражение (3.3) есть рекуррентное правило определения любого символа М-последовательности по предыдущим m символам.
могут принимать значения 0 или 1. Выражение (3.3) есть рекуррентное правило определения любого символа М-последовательности по предыдущим m символам.
Последовательность коэффициентов ![]() представляет собой так называемое характеристическое уравнение /18/, которое определяет обратные связи в генераторе М-последовательности: j-й разряд регистра сдвига подключен к обратной связи (ко входу сумматора по модулю 2), если
представляет собой так называемое характеристическое уравнение /18/, которое определяет обратные связи в генераторе М-последовательности: j-й разряд регистра сдвига подключен к обратной связи (ко входу сумматора по модулю 2), если ![]() , выход j-го разряда не связан с сумматором по модулю 2, если
, выход j-го разряда не связан с сумматором по модулю 2, если ![]() .
.
На рис.3.9 представлен генератор М-последовательности, построенный в соответствии с проверочным полиномом ![]() . Характеристическое уравнение 100101. Этот полином имеет степень
. Характеристическое уравнение 100101. Этот полином имеет степень ![]() и дает М-последовательность длиной
и дает М-последовательность длиной ![]() . В схеме генератора выходы третьего и пятого разрядов регистра сдвига подключаются к обратной связи, так как
. В схеме генератора выходы третьего и пятого разрядов регистра сдвига подключаются к обратной связи, так как ![]() , а
, а ![]() означает, что выход сумматора по модулю 2 связан со входом регистра сдвига.
означает, что выход сумматора по модулю 2 связан со входом регистра сдвига.
67
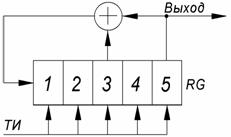
Рис.3.9. Генератор М-последовательности длиной ![]() , проверочный полином
, проверочный полином ![]() , характеристическое уравнение I00I0I
, характеристическое уравнение I00I0I
Полиномы ![]() для сокращения записи обозначают в восьмеричном представлении /10/: характеристическое уравнение справа разбивается на группы по три двоичных символа, если в последней группе число символов окажется меньше трех, то слева дописывается соответствующее число нулей, каждая группа прочитывается как двоичное число. Например, используемый выше полином
для сокращения записи обозначают в восьмеричном представлении /10/: характеристическое уравнение справа разбивается на группы по три двоичных символа, если в последней группе число символов окажется меньше трех, то слева дописывается соответствующее число нулей, каждая группа прочитывается как двоичное число. Например, используемый выше полином ![]() , имеющий характеристическое уравнение 100101, можно записать в восьмеричном коде как 45, а характеристическое уравнение для
, имеющий характеристическое уравнение 100101, можно записать в восьмеричном коде как 45, а характеристическое уравнение для ![]() 10000001001 (проверочный полином
10000001001 (проверочный полином ![]() ) запишется как 2011. Все проверочные полиномы заданной степени пронумерованы. Условно выбирается полином 1 - это полином с минимальным числом ненулевых коэффициентов. Для этого полинома можно определить α, которое является корнем уравнения
) запишется как 2011. Все проверочные полиномы заданной степени пронумерованы. Условно выбирается полином 1 - это полином с минимальным числом ненулевых коэффициентов. Для этого полинома можно определить α, которое является корнем уравнения ![]() , α называется примитивным элементом. Полином за номером 3 имеет корень уравнения
, α называется примитивным элементом. Полином за номером 3 имеет корень уравнения ![]() ,
, ![]() - третью степень примитивного элемента и т.д. Таким образом, номер полинома
- третью степень примитивного элемента и т.д. Таким образом, номер полинома ![]() совпадает со степенью примитивного элемента
совпадает со степенью примитивного элемента ![]() , которая обращает в нуль рассматриваемый проверочный полином. Номера полиномов и их восьмеричное представление приведены в /10/ для
, которая обращает в нуль рассматриваемый проверочный полином. Номера полиномов и их восьмеричное представление приведены в /10/ для ![]() и в приложении /1/ для
и в приложении /1/ для ![]() .
.
Пример. Полином 45 для ![]() приводится в приложении 1 под номером 1, полином под номером 3 записывается как
приводится в приложении 1 под номером 1, полином под номером 3 записывается как ![]() . Покажем, что если α – корень уравнения
. Покажем, что если α – корень уравнения ![]() , т.е.
, т.е. ![]() , то
, то ![]() является корнем уравнения
является корнем уравнения
![]() , т.е.
, т.е. ![]() . Подставляем
. Подставляем ![]() в
в ![]() , получим
, получим
![]() .
.
Но ![]() и
и ![]() .
.
 т.е. показано, что
т.е. показано, что ![]() является корнем уравнения
является корнем уравнения ![]() .
.
Именно номера полиномов будут использоваться при рассмотрении составных последовательностей с хорошими корреляционными свойствами.
Остановимся подробнее на свойствах М-последовательностей /1, 4,12,18/. Схема генератора М-последовательности, аналогичная представленной на рис.3.9, может давать N различных последовательностей в зависимости от начального состояния регистра сдвига. Все эти последовательности будут циклическими сдвигами одной последовательности.
М-последовательность содержит ![]() «единиц» и
«единиц» и ![]() «нулей». Вес последовательности (число «единиц»)
«нулей». Вес последовательности (число «единиц») ![]() . В последовательности содержатся все возможные комбинации из m двоичных символов, кроме комбинации, состоящей из одних нулей. Это свойство обусловило название М-последовательностей как последовательностей максимальной длины.
. В последовательности содержатся все возможные комбинации из m двоичных символов, кроме комбинации, состоящей из одних нулей. Это свойство обусловило название М-последовательностей как последовательностей максимальной длины.
Например, М-последовательность 0010111 содержит 4 «единицы» 3 «нуля». Вес последовательности равен 4. Количество «единиц» и «нулей" не будет меняться при циклических сдвигах последовательности: по 4 «единицы» и 3 «нуля» будет содержаться и в последовательности 1110010, и в других циклических сдвигах. Рассмотренные последовательности будут содержать все возможные комбинации по 3 символа: последовательность 0010111.001… можно представить последовательностью комбинаций 001, 010, 101, 011, 111, 110, 100. Порядок следования комбинаций будет различным для различных последовательностей. Это как раз определяет случайный характер М-последовательностей, поэтому они относятся к классу псевдослучайных последовательностей (ПСП).
В М-последовательности содержится ![]() блоков, т.е. последовательностей одинаковых элементов. Например, в последовательности 0010111 содержится 4 блока: 00, 1, 00, 111. Такое число блоков приближает М-последовательность к оптимальным последовательностям, которые имеют малые значения максимальных боковых выбросов КФ. Для оптимальной системы число блоков должно быть равным
блоков, т.е. последовательностей одинаковых элементов. Например, в последовательности 0010111 содержится 4 блока: 00, 1, 00, 111. Такое число блоков приближает М-последовательность к оптимальным последовательностям, которые имеют малые значения максимальных боковых выбросов КФ. Для оптимальной системы число блоков должно быть равным ![]() /2/.
/2/.
М-последовательность имеет двухуровневую ПКФ: ![]() ,
, ![]() , независимо от длины
, независимо от длины ![]() . Значение
. Значение ![]() является минимальным для длины
является минимальным для длины ![]() при любом m, что и определяет оптимальность М-последовательности. Разница между главным выбросом ПКФ
при любом m, что и определяет оптимальность М-последовательности. Разница между главным выбросом ПКФ ![]() и ее боковыми выбросами
и ее боковыми выбросами ![]() при увеличении
при увеличении ![]() возрастает, и при
возрастает, и при ![]() ПКФ М-последовательности приближается к КФ гауссовского белого шума, которая представляется в виде дельта-функции
ПКФ М-последовательности приближается к КФ гауссовского белого шума, которая представляется в виде дельта-функции ![]() ,
, ![]() - спектральная плотность шума.
- спектральная плотность шума.
На рис.3.10 представлена ПКФ М-последовательности.
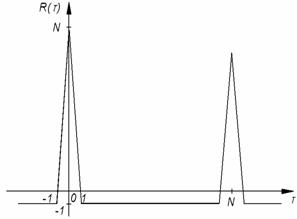
Рис.3.10. Периодическая корреляционная функция М-последовательности
Одно из важнейших свойств М-последовательностей - свойство сдвига и сложения, которое заключается в том, что поэлементная сумма по модулю 2 двух циклических сдвигов даст ту же М-последовательность со сдвигом, отличным от двух исходных. Если обозначить через ![]() - к-ый сдвиг, то свойство сдвига и сложения можно записать в виде:
- к-ый сдвиг, то свойство сдвига и сложения можно записать в виде:
![]() . (3.4)
. (3.4)
В /1/ дана методика определения номера сдвига i, который получается при сложении k – го и j – го циклических сдвигов одной последовательности с проверочным полиномом ![]() . В этой работе введено начало отсчета, т.е. нулевой циклический сдвиг – это М-последовательность с начальным блоком, состоящим из первых
. В этой работе введено начало отсчета, т.е. нулевой циклический сдвиг – это М-последовательность с начальным блоком, состоящим из первых ![]() «нулей» и одной «1» (на последнем месте).
«нулей» и одной «1» (на последнем месте).
Таким, образом, 00...01 - начальный блок нулевого циклического сдвига М-последовательности. Фактически - это начальные состояния разрядов регистра сдвига генератора М-последовательности с вынесенными сумматорами (рис.3.9), при этом «1» записывается в первый разряд, а в остальные – «0». При таком определении нулевого циклического сдвига свойство сдвига и сложения (3.4) можно записать в виде:
![]() . (3.5)
. (3.5)
Это уравнение - сравнение по модулю ![]() означает, что двучлен
означает, что двучлен ![]() является остатком от деления
является остатком от деления ![]() на
на ![]() , при этом следует иметь в виду, что все операции (сложение, умножение, деление) проводятся по модулю 2.
, при этом следует иметь в виду, что все операции (сложение, умножение, деление) проводятся по модулю 2.
Каждый циклический сдвиг можно записать ![]() вариантами сумм из двух других циклических сдвигов и единственным образом в виде суммы из n циклических сдвигов, номера которых меньше m , при этом n может принимать значения от 1 до m:
вариантами сумм из двух других циклических сдвигов и единственным образом в виде суммы из n циклических сдвигов, номера которых меньше m , при этом n может принимать значения от 1 до m:
![]() , (3.6)
, (3.6)
коэффициенты ![]() принимают два значения 0 или 1; при этом среди всех m значений этих коэффициентов только n равны 1, а остальные - 0,
принимают два значения 0 или 1; при этом среди всех m значений этих коэффициентов только n равны 1, а остальные - 0, ![]() .
.
Пример. Определим, в виде каких сумм циклических сдвигов можно представить ![]() и
и ![]() при
при ![]() . Для этого проводим деление
. Для этого проводим деление ![]() и
и ![]() на
на ![]() .
.
|
|
|
|
|
|
|
|
- 1-й остаток |
|
|
|
|
|
- 2-й остаток |
|
|
|
|
|
- 3-й остаток |
В результате деления получили 3 вида остатков, которые дают представление шестого циклического сдвига в виде соответствующих сумм ![]() .
.
Пятый циклический сдвиг можно представить суммой уже из 3 циклических сдвигов, номера которых меньше ![]() .
.
Состав суммы (3.6), т.е. значения коэффициентов ![]() , можно определить, используя генератор М-последовательности со встроенными сумматорами. На рис. 3.11 представлена такая схема для
, можно определить, используя генератор М-последовательности со встроенными сумматорами. На рис. 3.11 представлена такая схема для ![]() ,
, ![]() . Под соответствующими разрядами RG представлены их состояния в последующих тактах (слева записаны номера тактов). Состояние i -го разряда дает значение коэффициента
. Под соответствующими разрядами RG представлены их состояния в последующих тактах (слева записаны номера тактов). Состояние i -го разряда дает значение коэффициента ![]() , а номер такта совпадает с номером циклического сдвига. Справа записаны суммы вида (3.6) для различных циклических сдвигов.
, а номер такта совпадает с номером циклического сдвига. Справа записаны суммы вида (3.6) для различных циклических сдвигов.
Разберем еще одно свойство М-последовательностей, которое редко приводится в литературе. Это свойство определяет связи между последовательностями, их проверочными полиномами.
Оказывается, если ![]() - М-последовательность с номером
- М-последовательность с номером ![]() , а
, а ![]() - любое число,
- любое число, ![]() , то последовательность
, то последовательность ![]() , полученная выбором
, полученная выбором ![]() элементов
элементов ![]() -й последовательности
-й последовательности ![]() , также является М-последовательностью. При этом, при
, также является М-последовательностью. При этом, при ![]() ,
, ![]() получается та же
получается та же ![]() -я последовательность, только другой ее циклический сдвиг. Если
-я последовательность, только другой ее циклический сдвиг. Если ![]() и наибольший общий делитель
и наибольший общий делитель ![]() , то полученная последовательность имеет ту же длину
, то полученная последовательность имеет ту же длину ![]() , и ее номер определяется из соотношения
, и ее номер определяется из соотношения
![]() . (3.7)
. (3.7)
|
|
|
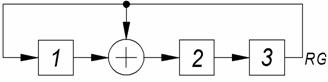
|
Номер такта |
Состояние RG |
|
||
|
а0 |
а1 |
а2 |
||
|
0 |
1 |
0 |
0 |
|
|
1 |
0 |
1 |
0 |
|
|
2 |
0 |
0 |
1 |
|
|
3 |
1 |
1 |
0 |
|
|
4 |
0 |
1 |
1 |
|
|
5 |
1 |
1 |
1 |
|
|
6 |
1 |
0 |
1 |
|
|
7 |
1 |
0 |
0 |
|
Рис.3.11
Если ![]() , получим М-последовательность меньшей длины
, получим М-последовательность меньшей длины ![]() . Операция преобразования одной последовательности в другую (или в другой циклический сдвиг) называется децимацией по индексу
. Операция преобразования одной последовательности в другую (или в другой циклический сдвиг) называется децимацией по индексу ![]() /12/. Рассмотрим связи между последовательностями и полиномами на примере.
/12/. Рассмотрим связи между последовательностями и полиномами на примере.
Пример. Последовательность длиной ![]() ,
, ![]() , находящаяся в приложении 1 под номером 1, характеризуется проверочным полиномом
, находящаяся в приложении 1 под номером 1, характеризуется проверочным полиномом ![]() и имеет вид: 0000100101100111110001101110101. Составим последовательность из
и имеет вид: 0000100101100111110001101110101. Составим последовательность из ![]() ее элементов: 0010010110011111000110111010100. Сопоставление полученной последовательности с исходной позволяет сделать вывод, что получена та же последовательность, но другой циклический сдвиг.
ее элементов: 0010010110011111000110111010100. Сопоставление полученной последовательности с исходной позволяет сделать вывод, что получена та же последовательность, но другой циклический сдвиг.
Составим последовательность из 3к-х элементов последовательности 1. Получим последовательность: 0001010110100001100100111110111, которая является 20-м циклическим сдвигом последовательности 3, характеризующейся проверочным полиномом ![]() .
.
Рассмотрим другие индексы децимации ![]() .
.
![]() приводят к последовательности 1.
приводят к последовательности 1. ![]() приводит к последовательности 5 с проверочным полиномом
приводит к последовательности 5 с проверочным полиномом ![]() . К этому же полиному приводят децимации по
. К этому же полиному приводят децимации по ![]() . Покажем это для
. Покажем это для ![]() . Полинома с номером 9 в таблице нет. Используем свойство, что умножение номера полинома на
. Полинома с номером 9 в таблице нет. Используем свойство, что умножение номера полинома на ![]() - приводит к той же последовательности. Проводим умножение 9 на 2 последовательно 5 раз (можно делить на 2), результата представляем по модулю 31. Получим: 9, 18, 36 = 5, 10, 20, 40 = 9. Из полученных значений выбираем минимальное, которое и определяет номер полученного полинома.
- приводит к той же последовательности. Проводим умножение 9 на 2 последовательно 5 раз (можно делить на 2), результата представляем по модулю 31. Получим: 9, 18, 36 = 5, 10, 20, 40 = 9. Из полученных значений выбираем минимальное, которое и определяет номер полученного полинома.
К полиному 3 приводят, кроме ![]() , еще децимации по индексам:
, еще децимации по индексам: ![]() . Децимации по индексу
. Децимации по индексу ![]() приводят к полиному 7 (а также
приводят к полиному 7 (а также ![]() ). Децимация
). Децимация ![]() даст последовательность 11 с проверочным полиномом
даст последовательность 11 с проверочным полиномом ![]() (а также
(а также ![]() ). Децимация с
). Децимация с ![]() приводит к последовательности 15 с проверочным
приводит к последовательности 15 с проверочным ![]() , а также
, а также ![]() .
.
Из рассмотренного примера можно сделать вывод, что все М-последовательности длиной 31 связаны между собой с индексами децимации
![]() . Все рассмотренные связи можно привести в виде диаграммы (рис.3.12).
. Все рассмотренные связи можно привести в виде диаграммы (рис.3.12).
Выше определены связи одного полинома с другими. Теперь нетрудно установить связи всех полиномов между собой. Для этого просмотреть цепи переходов полиномов при различных ![]() .
.
Пусть ![]() . Переход полинома 1 в полином 3 условно обозначим
. Переход полинома 1 в полином 3 условно обозначим ![]() . Полином 3 при
. Полином 3 при ![]() переходит в полином 5:
переходит в полином 5: ![]() . Цепь продолжается:
. Цепь продолжается: ![]() . Дальнейшие вычисления дают, что
. Дальнейшие вычисления дают, что ![]() . Таким образом, имеем замкнутую цепь, в которой участвуют все полиномы:
. Таким образом, имеем замкнутую цепь, в которой участвуют все полиномы:
![]() .
.
Эта цепь на рис.3.12 представлена в виде шестиугольника.
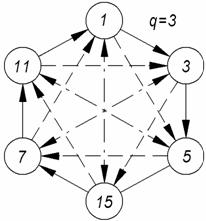
Рис.3.12. Диаграмма децимаций М-последовательности длиной ![]() - при обходе по часовой стрелке и
- при обходе по часовой стрелке и ![]() - при обходе против часовой стрелки,
- при обходе против часовой стрелки, ![]() и
и ![]() соответственно,
соответственно, ![]()
Следует отметить, что при обходе цепи в одном направлении имеем децимации с ![]() , а при обходе в другом направлении получаем децимации с
, а при обходе в другом направлении получаем децимации с ![]() (переход
(переход ![]() указывает на значение индекса децимации так же, как переход
указывает на значение индекса децимации так же, как переход ![]() ).
).
Пусть теперь ![]() . С этим индексом децимации имеем цепь
. С этим индексом децимации имеем цепь ![]() , в которой участвует только половина полиномов. При обходе в обратном направлении имеем
, в которой участвует только половина полиномов. При обходе в обратном направлении имеем ![]() . Вторая цепь объединяет другие полиномы:
. Вторая цепь объединяет другие полиномы: ![]() , Эти цепи представлены на рис.3.12 в виде треугольников.
, Эти цепи представлены на рис.3.12 в виде треугольников.
Наконец, пусть ![]() . Это дает попарную связь полиномов:
. Это дает попарную связь полиномов: ![]() - полином 1 переходит в полином 15 с
- полином 1 переходит в полином 15 с ![]() , и полином 15 переходит в полином l с таким же индексом децимации. Следует отметить, что
, и полином 15 переходит в полином l с таким же индексом децимации. Следует отметить, что ![]() . определяет связь обратных полиномов: полином 15 является обратном первому. Другие пары обратных полиномов:
. определяет связь обратных полиномов: полином 15 является обратном первому. Другие пары обратных полиномов: ![]() и
и ![]() .
.
Таким образом, все полиномы образуют объединенную систему, что хорошо видно на рис.3.12.
3.4. Предпочтительные пары М-последовательностей
М-последовательности находят широкое применение благодаря относительной просторе их генерации, а также «хорошей» периодической функции корреляции. Однако в ряде применений, в частности в многоканальных системах со свободным доступом, основной характеристикой сигналов является их функция взаимной корреляции. Для этой функции М-последовательности в общем случае дают большие выбросы. Как указано в /12/, максимальный выброс периодической функции взаимной корреляции достигает величины ![]() , где
, где ![]() - длина последовательности.
- длина последовательности.
Однако среди М-последовательностей заданной длины можно выбрать такие пары последовательностей, для которых взаимные периодические корреляционные функции имеют три уровня:
![]() . (3.8)
. (3.8)
где ![]() - целая часть числа
- целая часть числа ![]() .
.
Эти пары М-последовательностей называют предпочтительными парами /12/.
В ряде работ /12,18/ показано, что номера ![]() и
и ![]() предпочтительных пар полиномов должны быть связаны между собой соотношением
предпочтительных пар полиномов должны быть связаны между собой соотношением
![]() , (3.9)
, (3.9)
где ![]() - определяющий номер, принадлежит полной группе номеров полиномов заданной степени. В указанных выше и других работах определены значения
- определяющий номер, принадлежит полной группе номеров полиномов заданной степени. В указанных выше и других работах определены значения ![]() , дающие предпочтительные пары, для
, дающие предпочтительные пары, для ![]() . Для некоторых
. Для некоторых ![]() значения
значения ![]() приведены в табл.3.1.
приведены в табл.3.1.
Таблица 3.1
|
Значения определяющих номеров |
||
|
|
|
|
|
5 |
31 |
3, 5 |
|
6 |
63 |
5, 11 |
|
77 |
127 |
3, 5,9, 11,23 |
|
9 |
511 |
3, 5, 13, 17, 19, 47 |
|
10 |
1023 |
5, 13, 17, 25, 49, 511 |
|
11 |
2047 |
3, 5,9,13, 17, 33, 35, 43, 57, 95, 107 |
Чтобы выбрать полином, составляющий с заданным полиномом ![]() предпочтительную пару, надо провести умножение
предпочтительную пару, надо провести умножение ![]() на одно из значений
на одно из значений ![]() , приведенных в табл.3.1. Если результат не принадлежит полной группе полиномов заданной степени, то значение
, приведенных в табл.3.1. Если результат не принадлежит полной группе полиномов заданной степени, то значение ![]() следует уточнить. Для этого полученное значение
следует уточнить. Для этого полученное значение ![]() надо
надо ![]() раз умножить или разделить на 2 по модулю
раз умножить или разделить на 2 по модулю ![]() . Минимальное значение из всех полученных результатов и будет уточненным номером
. Минимальное значение из всех полученных результатов и будет уточненным номером ![]() парного полинома.
парного полинома.
Для определения предпочтительных пар удобно пользоваться диаграммой децимаций. Воспользуемся рис. 3.12 для определения предпочтительных пар для ![]() . Для этой длинны предпочтительные пары образуются при
. Для этой длинны предпочтительные пары образуются при ![]() (табл.3.1).
(табл.3.1).
Поэтому полином 1 составляет предпочтительную паpу с полиномами 3 и 5, а также с полиномами 11 (переход от полинома 11 к полиному 1 при ![]() ) и с полиномом 7 (переход от полинома 7 к полиному I при
) и с полиномом 7 (переход от полинома 7 к полиному I при ![]() ). Аналогично можно найти предпочтительные пары для любого полинома. Например, полином 3 образует предпочтительные пары с полиномами 5 и 15, а также с полиномами 1 и 11. Для
). Аналогично можно найти предпочтительные пары для любого полинома. Например, полином 3 образует предпочтительные пары с полиномами 5 и 15, а также с полиномами 1 и 11. Для ![]() только связь с
только связь с ![]() не дает предпочтительной пары.
не дает предпочтительной пары.
Определим предпочтительные пары для ![]() ,
, ![]() .
.
Найдем для полинома 7 предпочтительные пары:
![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]() ,
, ![]() .
.
Следовательно, получены следующие предпочтительные пары, содержащие полином 7:
7-35, 7-91, 7-119, 7-343, 7-127.
На рис.3.13 приведена диаграмма предпочтительных связей полиномов для ![]() . Все 60 полиномов разбиваются на две группы, в каждой группе полиномы располагаются по окружности. При обходе окружности по часовой стрелке номер последующего полинома определяется по формуле (3.9) при
. Все 60 полиномов разбиваются на две группы, в каждой группе полиномы располагаются по окружности. При обходе окружности по часовой стрелке номер последующего полинома определяется по формуле (3.9) при ![]() . Связи, соответствующие
. Связи, соответствующие ![]() , показаны между всеми полиномами. Остальные предпочтительные связи при
, показаны между всеми полиномами. Остальные предпочтительные связи при ![]() показаны только для полинома 1, чтобы не загромождать рисунок. Такие же связи существуют для каждого полинома. Для определения связей полиномов из внутренней группы следует поменять местами внутреннюю и внешнюю окружности.
показаны только для полинома 1, чтобы не загромождать рисунок. Такие же связи существуют для каждого полинома. Для определения связей полиномов из внутренней группы следует поменять местами внутреннюю и внешнюю окружности.
Часто представляет интерес не только значение корреляционной, функции, но и вес каждой из них. В этом случае говорят о взаимно, корреляционном спектре. Предпочтительные пары имеют трехуровневый спектр:
77
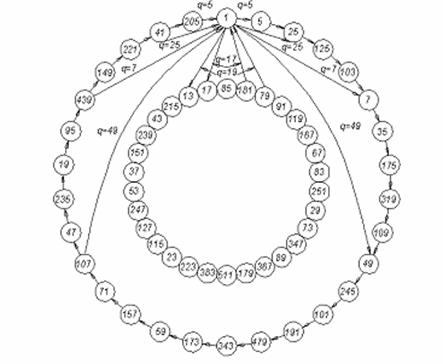
Рис.3.13. Предпочтительные пары для полинома 1, ![]()
уровень ![]() встречается
встречается ![]() раз,
раз,
уровень -1 встречается ![]() раз,
раз,
уровень ![]() встречается:
встречается: ![]() раз,
раз,
где ![]() .
.
Пример. Найти взаимный корреляционный спектр для ![]() ,
, ![]() ,
, ![]() .
.
Уровень -65 встречается 120 раз,
уровень -1 встречается 767 раз,
уровень +63 встречается 136 раз.
3.5. Максимальные связные множества М-последовательностей
Предпочтительные пары М-последовательностей могут объединяться в множества, которые называются связными. В таком множестве любая пара является предпочтительной. Мощность таких множеств, т.е. число полиномов, входящих в одно множество, различно - от 0 до максимального значения ![]() . Связное множество максимальной мощности
. Связное множество максимальной мощности ![]() называется максимальным связным множеством. В табл.3.2, взятой из /12/ , приводятся мощности множества всех М-последовательностей и максимальных связных множеств, а также максимальные значения взаимной корреляционной функции для всех М-последовательностей
называется максимальным связным множеством. В табл.3.2, взятой из /12/ , приводятся мощности множества всех М-последовательностей и максимальных связных множеств, а также максимальные значения взаимной корреляционной функции для всех М-последовательностей ![]() и для предпочтительных паp
и для предпочтительных паp ![]() .
.
Таблица 3.2
Мощности множеств М-последовательностей и максимальных связных множеств и максимальные значения их корреляционных функций
|
|
Длина последовательности |
Число М-последовательностей |
|
|
|
|
3 |
7 |
2 |
5 |
2 |
5 |
|
4 |
15 |
2 |
9 |
0 |
9 |
|
5 |
31 |
6 |
11 |
3 |
9 |
|
6 |
63 |
6 |
23 |
2 |
17 |
|
7 |
127 |
18 |
41 |
6 |
17 |
|
8 |
255 |
16 |
95 |
0 |
33 |
|
9 |
511 |
48 |
113 |
2 |
33 |
|
10 |
1023 |
60 |
383 |
3 |
65 |
|
11 |
2047 |
176 |
287 |
4 |
65 |
|
12 |
4095 |
144 |
1407 |
0 |
129 |
|
13 |
8191 |
630 |
|
4 |
129 |
|
14 |
16383 |
756 |
|
3 |
257 |
|
15 |
32767 |
1800 |
|
2 |
257 |
|
16 |
65535 |
2048 |
|
0 |
513 |
Анализ табл.3.2 позволяет сделать следующие выводы:
ансамбль М-последовательностей небольшой. Например, для ![]() имеется только 60 М-последовательностей;
имеется только 60 М-последовательностей;
предпочтительные пары при ![]() имеют меньшие значения боковых выбросов корреляционной функции, чем все множество М-последовательностей, и с ростом
имеют меньшие значения боковых выбросов корреляционной функции, чем все множество М-последовательностей, и с ростом ![]() эта разница увеличивается. Иными словами, предпочтительные пары целесообразно использовать при большой длине последовательностей
эта разница увеличивается. Иными словами, предпочтительные пары целесообразно использовать при большой длине последовательностей ![]() ;
;
число М-последовательностей, составляющих максимальное связное множество, является небольшим, ![]() . При
. При ![]() предпочтительные пары отсутствуют, и для
предпочтительные пары отсутствуют, и для ![]()
![]() . Максимальное значение
. Максимальное значение ![]() принимает для небольшой длины последовательности
принимает для небольшой длины последовательности ![]() . Это значит, что можно определить такие шесть М-последовательностей, которые дадут трехуровневый взаимно-корреляционный спектр. На рис.3.14 представлена диаграмма предпочтительных связей для
. Это значит, что можно определить такие шесть М-последовательностей, которые дадут трехуровневый взаимно-корреляционный спектр. На рис.3.14 представлена диаграмма предпочтительных связей для ![]() . На диаграмме стрелки указывают направление определения номера полинома при заданном
. На диаграмме стрелки указывают направление определения номера полинома при заданном ![]() .
.
Чтобы не загромождать рисунок, предпочтительные связи с ![]() показаны только для полинома 1. Аналогичные связи существуют для каждого полинома.
показаны только для полинома 1. Аналогичные связи существуют для каждого полинома.
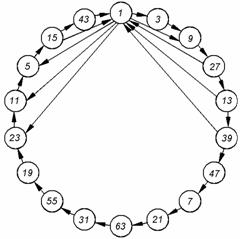
Рис.3.14. Диаграмма предпочтительных связей для ![]() (каждые 6 последовательных полиномов образуют максимальную связную систему)
(каждые 6 последовательных полиномов образуют максимальную связную систему)
Для длины ![]()
![]() . На рис.3.15 представлена диаграмма максимальных связных множеств для
. На рис.3.15 представлена диаграмма максимальных связных множеств для ![]() . Для
. Для ![]() связи не приведены, чтобы не загромождать чертеж, хотя эти связи также образуют максимальную связную систему мощностью
связи не приведены, чтобы не загромождать чертеж, хотя эти связи также образуют максимальную связную систему мощностью ![]() . Значение
. Значение ![]() дает только одну предпочтительную пару - мощность связного множества равна 2.
дает только одну предпочтительную пару - мощность связного множества равна 2.
Рис.З.15. Максимальные связные множества для ![]()
В соответствии с рис.3.15 можно привести следующие примеры максимальных связных множеств, содержащих полином 1:
1-5-17, 1-13-17, 1-13-205, 1-205-181, 1-79-181, 1-5-79, а также 1-25-181, 1-41-17, (![]() ), 1- 49-107 (
), 1- 49-107 (![]() ),
),
Аналогично можно составить максимальные связные множества для любого полинома.
3.6. Составные последовательности на основе двух и более М-последовательностей
Как показано в §3.1, на основе М-последовательностей можно построить ансамбль квазиортогональных двоичных последовательностей, объем которого во много раз превосходит число М-последовательностей.
Эти составные последовательности образуют последовательности немаксимальнои длины, проверочные полиномы которых ![]() могут быть представлены произведением проверочных полиномов исходных М-последовательностей
могут быть представлены произведением проверочных полиномов исходных М-последовательностей ![]() . Для их формирования можно использовать регистр сдвига, охваченный обратными связями в соответствии с полиномом
. Для их формирования можно использовать регистр сдвига, охваченный обратными связями в соответствии с полиномом ![]() , число разрядов регистра определяется его степенью. Эти последовательности можно также формировать с использованием
, число разрядов регистра определяется его степенью. Эти последовательности можно также формировать с использованием ![]() регистров сдвига, охваченных обратными связями в соответствии с полиномами
регистров сдвига, охваченных обратными связями в соответствии с полиномами ![]() . Выходы регистров сдвига суммируются по модулю 2. Длина последовательности равна
. Выходы регистров сдвига суммируются по модулю 2. Длина последовательности равна ![]() - наименьшему общему кратному длин
- наименьшему общему кратному длин ![]() исходных последовательностей.
исходных последовательностей.
Среди таких последовательностей широко известны последовательности Гоулда, которые формируются на основе двух М-последовательностей одинаковой длины ![]() . Структурные схемы генератора последовательностей Гоулда для
. Структурные схемы генератора последовательностей Гоулда для ![]() представлены на рис.З.16 (а - при использовании 10-разрядного регистра сдвига, б - при использовании двух 5-разрядных регистров).
представлены на рис.З.16 (а - при использовании 10-разрядного регистра сдвига, б - при использовании двух 5-разрядных регистров).
Любое относительное изменение сдвигов исходных М-последовательностей приводит к формированию, новой последовательности. Поэтому ансамбль последовательностей Гоулда равен ![]() : он состоит из различных последовательностей, формируемых при различных сдвигах, и двух исходных М-последовательностей.
: он состоит из различных последовательностей, формируемых при различных сдвигах, и двух исходных М-последовательностей.
Самым интересным в этом методе формирования большого ансамбля сигналов является то, что при выборе предпочтительных пар исходных последовательностей корреляционная функция вновь образованной последовательности принимает такие же три значения ![]() , как и корреляционная функция исходных предпочтительных пар. В отличии от М-последовательностей для последовательности Гоулда трехуровневыми будут периодические и авто- и взаимно корреляционные функции.
, как и корреляционная функция исходных предпочтительных пар. В отличии от М-последовательностей для последовательности Гоулда трехуровневыми будут периодические и авто- и взаимно корреляционные функции.
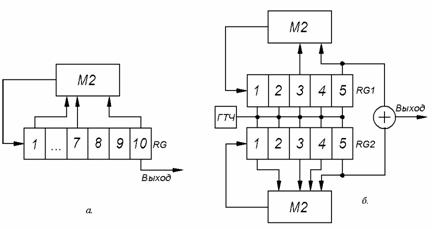
Рис.3.16. Формирование последовательностей Гоулда,
![]()
Для увеличения ансамбля сигналов можно использовать сложение по модулю 2 трех М-последовательностей одинаковой длины. Ансамбль сигналов при этом будет равен ![]() : слагаемое
: слагаемое ![]() обусловлено различными сдвигами двух исходных последовательностей относительно третьей, a
обусловлено различными сдвигами двух исходных последовательностей относительно третьей, a ![]() - это число последовательностей при сложении двух М-последовательностей из трех. Например: для
- это число последовательностей при сложении двух М-последовательностей из трех. Например: для ![]() ансамбль последовательностей Гоулда будет содержать более
ансамбль последовательностей Гоулда будет содержать более ![]() сигналов длиной
сигналов длиной ![]() .
.
Такая простая возможность получения большого ансамбля сигналов очень заманчива. В некоторых работах, например в /4/, указано на такую возможность. Однако сведения о корреляционной функции отсутствуют.
Исследования для ![]() ,
, ![]() показали, что некоторые максимальные связные множества могут дать трехуровневые корреляционные функции. Назовем эти множества предпочтительными тройками. В этих тройках связи между исходными полиномами
показали, что некоторые максимальные связные множества могут дать трехуровневые корреляционные функции. Назовем эти множества предпочтительными тройками. В этих тройках связи между исходными полиномами ![]() определяются соотношением
определяются соотношением
![]() , (3.10)
, (3.10)
где ![]() и
и ![]() связаны подобным соотношением
связаны подобным соотношением
![]() , (3.11)
, (3.11)
причем ![]() ,
, ![]() и
и ![]() принадлежат группе номеров
принадлежат группе номеров ![]() , определяющих предпочтительные пары (см. табл.3.1).
, определяющих предпочтительные пары (см. табл.3.1).
Для ![]() определены номера
определены номера ![]() ,
, ![]() ,
,![]() .
.
На рис.3.17 представлены предпочтительные тройки для ![]() . На этом рисунке для наглядности номера полиномов расставлены в две линии (а не 2 окружности, как на рис.3.13 и 3.15). Предпочтительные тройки образуются вершинами заштрихованных треугольников. Например, предпочтительными тройками, содержащими полином 1, будут: 1-181-79, 1-5-I7, 1-205-13. Для
. На этом рисунке для наглядности номера полиномов расставлены в две линии (а не 2 окружности, как на рис.3.13 и 3.15). Предпочтительные тройки образуются вершинами заштрихованных треугольников. Например, предпочтительными тройками, содержащими полином 1, будут: 1-181-79, 1-5-I7, 1-205-13. Для ![]() имеется всего 60 предпочтительных троек, и каждая тройка дает ансамбль объемом более
имеется всего 60 предпочтительных троек, и каждая тройка дает ансамбль объемом более ![]() последовательностей.
последовательностей.
Исследование периодических корреляционных функций последовательностей Гоулда, сформированных на основе трех М-последовательностей, было проведено на ЭВМ для ![]() . Были проверены различные максимальные связные множества, в том числе предпочтительные тройки. Только предпочтительные тройки давали трехуровневые корреляционные функции. Однако при некоторых относительных сдвигах исходных М-последовательностей появлялся четвертый уровень корреляционных функций, равный 255 или -257. Сдвиги, при которых появлялся четвертый уровень, назовем аномальными. Исследования показали, что один аномальный сдвиг приходится на 3-4 нормальных сдвига (для взаимно-корреляционных функций, для автокорреляционных - реже). Если при построении ансамбля последовательностей Гоулда такие аномальные сдвиги исходных М-последовательностей не использовать, то корреляционные функции этого ансамбля будут трехуровневыми, а ансамбль будет содержать приблизительно
. Были проверены различные максимальные связные множества, в том числе предпочтительные тройки. Только предпочтительные тройки давали трехуровневые корреляционные функции. Однако при некоторых относительных сдвигах исходных М-последовательностей появлялся четвертый уровень корреляционных функций, равный 255 или -257. Сдвиги, при которых появлялся четвертый уровень, назовем аномальными. Исследования показали, что один аномальный сдвиг приходится на 3-4 нормальных сдвига (для взаимно-корреляционных функций, для автокорреляционных - реже). Если при построении ансамбля последовательностей Гоулда такие аномальные сдвиги исходных М-последовательностей не использовать, то корреляционные функции этого ансамбля будут трехуровневыми, а ансамбль будет содержать приблизительно ![]() последовательностей (для
последовательностей (для ![]() это приблизительно
это приблизительно ![]() ).
).
В табл.3.3 приведены взаимные корреляционные спектры, последовательностей Гоулда на основе предпочтительных троек, которые получены моделированием на ЭВМ.
Таблица 3.3
|
Уровень |
Количество выбросов |
|
63 |
126 - 148 |
|
-1 |
750 – 780 |
|
-65 |
110 - 128 |

Рис. 3.17. Максимальные связные множества, образующие предпочтительные тройки (— q=5 – слева на право, — q=13 – справа на лево, —— q=17 – справа налево)
Схему сложения трех М-последовательностей для получения большого ансамбля двоичных сигналов можно использовать при различной длине исходных последовательностей. Большое множество последовательностей Касами получается, если две последовательности имеют длину ![]() ,
, ![]() - четное, а третья -
- четное, а третья - ![]() /12/. Касами показал, что две последовательности длиной
/12/. Касами показал, что две последовательности длиной ![]() должны быть предпочтительной парой
должны быть предпочтительной парой ![]() , третья последовательность является последовательностью меньшей длины (длина
, третья последовательность является последовательностью меньшей длины (длина ![]() укладывается
укладывается ![]() раз в
раз в ![]() ). Связь третьей последовательности с первой определяется
). Связь третьей последовательности с первой определяется ![]() . Третий полином будет непримитивным, но его номер и восьмеричное представление приводятся в таблицах для длины
. Третий полином будет непримитивным, но его номер и восьмеричное представление приводятся в таблицах для длины ![]() /10/.
/10/.
Приведем пример расчета номеров исходных последовательностей для получения последовательностей Касами для ![]() :
:
![]() ,
, ![]() .
.
Значения ![]() в таблице /10/ имеются, а
в таблице /10/ имеются, а ![]() - нет. Уточнение значения
- нет. Уточнение значения ![]() дает
дает ![]() .
.
Для ![]() составим табл.3.4 с примерами исходных последовательностей, дающих большое множество последовательностей Касами.
составим табл.3.4 с примерами исходных последовательностей, дающих большое множество последовательностей Касами.
Таблица 3.4
|
Полиномы исходных последовательностей |
||
|
2415 |
2707 |
0051 |
|
2011 |
3515 |
0075 |
|
2443 |
3733 |
0073 |
|
3301 |
2347 |
0075 |
|
3575 |
3265 |
0051 |
|
3771 |
3133 |
0073 |
|
2157 |
3531 |
0045 |
|
3515 |
2745 |
0067 |
|
2773 |
2617 |
0073 |
|
2033 |
3471 |
0057 |
|
2461 |
3067 |
0057 |
|
3023 |
2363 |
0075 |
|
3543 |
3117 |
0067 |
|
2745 |
2641 |
0051 |
|
2431 |
3427 |
0067 |
|
3177 |
2377 |
0075 |
|
3525 |
2461 |
0051 |
Предпочтительные пары с ![]() выбраны по диаграмме рис. 3.15, а номера третьей последовательности вычислены путем умножения номера первой последовательности на 33 и уточнения полученного значения по методике, приведенной в §3.3.
выбраны по диаграмме рис. 3.15, а номера третьей последовательности вычислены путем умножения номера первой последовательности на 33 и уточнения полученного значения по методике, приведенной в §3.3.
В отличие от последовательностей Гоулда последовательности Касами имеют пять уровней корреляционной функции: ![]() и максимальное значение выбросов корреляционных функций последовательностей Касами не превышает максимального значения
и максимальное значение выбросов корреляционных функций последовательностей Касами не превышает максимального значения ![]() для последовательностей Гоулда.
для последовательностей Гоулда.
Объем ансамбля последовательностей Касами при ![]() равен
равен ![]() , a при
, a при ![]()
![]() .
.
Для ![]() ансамбль содержит 32800 последовательностей Касами. В заключение приведем сравнение рассмотренных последовательностей по объему ансамбля и максимальным значениям корреляционных функций
ансамбль содержит 32800 последовательностей Касами. В заключение приведем сравнение рассмотренных последовательностей по объему ансамбля и максимальным значениям корреляционных функций ![]() для
для ![]() . Сравнительные данные сведены в табл.3.5.
. Сравнительные данные сведены в табл.3.5.
Таблица 3.5
Сравнение М-последовательностей, последовательностей Гоулда и Касами для ![]()
|
Последовательности |
Объем ансамбля |
|
|
|
М-последовательность |
60 |
383 |
|
|
Максимальные связные множества М-последовательности |
3 |
65 |
|
|
Последовательности Гоулда |
на основе предпочтительных пар |
1025 |
65 |
|
на основе предпочтительных троек (нормальные сдвиги) |
|
65 |
|
|
Последовательности Касами |
32800 |
||
3.7. Примеры применения псевдослучайных последовательностей
В заключении следует заметить, что псевдослучайные последовательности нашли применение не только для кодового разделения каналов в системах связи.
По-видимому, раньше всего они начали использоваться для получения псевдослучайного шума в устройствах радиоизмерительной и измерительой техники /19/. Прежде всего это касается М-последовательностей, что обусловлено простотой их генерации.
При увеличении числа разрядов сдвигового регистра m резко возрастает длинна ПСП N=2m-1. Например, при m=20 формируемая в регистре ПСП повторяется только после прохождения 220-1 фактически не коррелированных двоичных цифр. Для интервалов наблюдения, более коротких, чем период ПСП N, законы распределения первого и второго порядков, полученные при ее обработке совершенно идентичны аналогичным законам распределения, которые получаются для истинного шумового случайного процесса, формируемого по схеме Бернулли путем независимой выборки результатов действительных случайных испытаний. В этих испытаниях с равной вероятностью появляются величины +а и –а. Сумма S из n<m<<2m-1 смежных двоичных цифр (0 или 1), принадлежащих ПСП, во всех имеющих практическую значимость случаях обладает биноминальным распределением, характеризующим ситуацию, когда в n независимых испытаниях получается S благоприятных исходов. Таким образом, используя простые счетчики, можно получать случайные числа с биноминальным или (при больших n) примерно гауссовским распределением. Пропуская псевдослучайный сигнал через ФНЧ с постоянной времени значительно превышающей длительность элемента ПСП τ (но не большей значения m·τ), можно получить сигнал, у которого распределение первого порядка совершенно не отличается от гауссовского.
Спектральная плотность мощности псевдослучайного прямоугольного аналогового сигнала является обязательно линейчатой. Расстояние между спектральными линиями обратно пропорционально длительности периода N·τ /16/. Псевдослучайный шум действует совершенно также, как и белый шум с ограниченным спектром, неравномерность которого не превышает 0,1дБ вплоть до частоты 0,2·π·τ. При помощи формирующих фильтров можно легко трансформировать спектр мощности требуемым образом.
Упрощенная функциональная схема генератора псевдослучайного шума приведена на рис. 3.18. Она позволяет получить шум в цифровом виде, бинарный шумовой сигнал с точной фиксацией уровней (положительного и отрицательного), приблизительно гауссовский шум с заданным спектром мощности и шум с заданным распределением амплитуды.
Генераторы псевдослучайных шумовых сигналов обладают несколькими преимуществами по сравнению с аналоговыми: псевдослучайный шумовой сигнал формируется при помощи надежной цифровой схемы; ширина спектра двоичного шумового сигнала пропорциональна частоте тактовых импульсов; сдвиговый регистр может быть возвращен в исходное состояние, что позволяет точно повторять данную реализацию последовательности случайных событий.
В настоящее время существует большое число разнообразных схем генераторов случайных сигналов, основным элементом которых является генератор ПСП (см., например, /20, 21/).
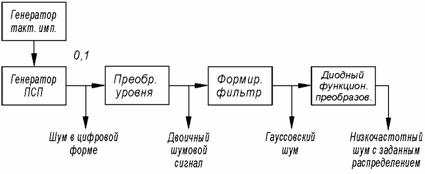
Рис.3.18. Функциональная схема генератора псевдослучайных сигналов
Широкополосные сигналы, полученные на основе ПСП, широко используются для повышения помехоустойчивости и эффективности связи в каналах с многолучевым распространением радиоволн. До изобретения ШПС для этой цели использовались различные методы разнесенного приема /22/, которые относятся к пассивным методам борьбы с замираниями сигналов.
Активные методы предполагают, во-первых, использование сигналов , специально предназначенных для передачи информации по многолучевым каналам, во-вторых, они предполагают получение более полных данных о свойствах и состоянии канала связи и использование этих данных для повышения эффективности системы связи и улучшения ее помехоустойчивости. Данные о состоянии канала получаются на основании изучения параметров принимаемого сигнала. Такое изучение обычно проводится параллельно с приемом информации, а его результаты используются при обработке сигналов.
Применение активных методов возможно только в широкополосных системах связи.
Главным преимуществом ШПС является то, что они дают возможность разделить пришедший в точку приема суммарный многолучевой сигнал на отдельные нефлюктуирующие лучи – сигналы, пришедшие по каждому из лучей распространения. Это достигается применением для обработки сигнала согласованного фильтра, который, как известно, сжимает широкополосные сигналы во времени в базу раз. При этом основные максимумы сигналов отдельных лучей разделяются во времени. Незначительное изменение задержки одного из лучей не приведет к изменению амплитуды суммарного сигнала (после фильтра). Сместится по времени лишь один из максимумов сигнала.
Ширина основного максимума АКФ сигнала, как известно, равна ![]() (F – ширина спектра сигнала). Поэтому для разделения лучей с минимальной разностью времени распространения Δτ необходимо использовать сигналы с F>1/Δτ. Такие же результаты можно получить в многоканальном корреляционном устройстве. Для эффективного разделения лучей ШПС должны обладать хорошими автокорреляционными свойствами.
(F – ширина спектра сигнала). Поэтому для разделения лучей с минимальной разностью времени распространения Δτ необходимо использовать сигналы с F>1/Δτ. Такие же результаты можно получить в многоканальном корреляционном устройстве. Для эффективного разделения лучей ШПС должны обладать хорошими автокорреляционными свойствами.
При разделении лучей появляется возможность эффективно использовать энергию всех лучей, т.к. при этом можно осуществить некогерентное их накопление. Впервые на практике это было реализовано в коротковолновой системе связи «Rake» («Грабли») /23/, в которой применены широкополосные дискретные ЧМ сигналы, полученные на основе М-последовательности. В настоящее время это название системы стало нарицательным; rake – процедура используется, как указывалось выше, в системах с кодовым разделением каналов CDMA.
Последовательности Голда и М-последовательности нашли применение для формирования широкополосных сигналов в спутниковых радионавигационных системах (СРНС), в которых последние используются как для передачи различного рода навигационной информации, так и для кодового разделения сигналов различных спутников. Принципы работы СРНС и построения аппаратуры потребителей достаточно подробно освящено в /24/.
3.8. Основная информация
1. В асинхронных адресных системах связи должны использоваться сигналы, удовлетворяющие следующим условиям: сигналы, должны иметь большую базу и большой ансамбль сигналов, «хорошие» корреляционные и взаимные корреляционные функций, а также формироваться с помощью относительно простых схем с быстрой перестройкой на другие сигналы и обрабатываться с помощью не очень сложных устройств в приемнике.
Этим условиям в той или иной степени удовлетворяют сигналы, сформированные на базе двоичных последовательностей с использованием манипуляции по фазе или амплитуде. Наибольшее применение находят фазоманипулированные сложные сигналы. База этих сигналов равна числу элементов в последовательности. Дискретно-частотные сигналы, при формировании которых используется манипуляция по частоте, позволяют получить большую базу при ограниченном числе элементов в сигнале, но имеют небольшой ансамбль.
2. Среди двоичных последовательностей, используемых для формирования сложных фазоманипулированных сигналов, известны ортогональные и квазиортогональные двоичные последовательности. Ортогональные последовательности (Уолша, Хаара, Радемахера и др.) находят ограниченное применение вследствие того, что они имеют ограниченный объем ансамбля, да и ортогональность у них наблюдается только в точке, а при рассогласованиях во времени и частоте они дают большие боковые выбросы.
Среди квазиортогональных последовательностей известны последовательности Лежандра, М-последовательности, нелинейные рекуррентные последовательности и др. Последовательности Лежандра известны для небольшой длины, объем ансамбля их невелик, поэтому они находят пока ограниченное применение. М-последовательности (линейные рекуррентные последовательности) формируются с помощью регистра сдвига, охваченного обратными связями через сумматор по модулю 2, а для формирования нелинейных рекуррентных последовательностей используется нелинейная обратная связь. Нелинейные рекуррентные последовательности образуют очень большой ансамбль сигналов, но пока неизвестны нелинейные рекуррентные последовательности, обладающие «хорошими» корреляционными функциями.
3. Для увеличения объема ансамбля используются составные сигналы, сформированные на базе двух и более ортогональных или квазиортогональных последовательностей. При образовании составных сигналов можно использовать операции либо суммирования по модулю 2, либо мажоритарное правило.
4. Двоичные последовательности, формируемые с помощью регистров сдвига, находят широкое применение в широкополосных системах связи благодаря относительной простоте технической реализации схемы формирования.
5. При выборе обратных связей в регистре сдвига в соответствии с примитивным полиномом генерируются М-последовательности, которые имеют «хорошие» автокорреляционные функции, но малый ансамбль сигналов и большие выбросы взаимных корреляционных функций.
6. Среди всех М-последовательностей одной длины ![]() можно найти такие пары, называемые предпочтительными, которые имеют трехуровневые взаимные корреляционные функции, причем максимальный выброс равен
можно найти такие пары, называемые предпочтительными, которые имеют трехуровневые взаимные корреляционные функции, причем максимальный выброс равен ![]() .
.
7. Связные множества состоят из М-последовательностей таких, что каждая пара является предпочтительной, то есть внутри этого множества корреляционные функции являются трехуровневыми и имеют максимальное значение, равное ![]() . Но мощность этих множеств (число составляющих их М-последовательностей) небольшая. Для различной длины максимальная мощность принимает значения от 0 до 6.
. Но мощность этих множеств (число составляющих их М-последовательностей) небольшая. Для различной длины максимальная мощность принимает значения от 0 до 6.
8. С использованием 2-3 регистров сдвига и сумматора по модулю 2 можно сформировать так называемые последовательности Гоулда и Касами, которые имеют ансамбль значительно больший, чем множество М-последовательностей.
Последовательности Гоулда формируются при использовании регистров сдвига одинаковой длины ![]() , то есть при сложении по модулю 2 2-3-х М-последовательностей одинаковой дайны
, то есть при сложении по модулю 2 2-3-х М-последовательностей одинаковой дайны ![]() , Объем ансамбля при этом будет равен приблизительно
, Объем ансамбля при этом будет равен приблизительно ![]() , где
, где ![]() -число исходных М-последовательностей (
-число исходных М-последовательностей (![]() ). Трехуровневые корреляционные функции с
). Трехуровневые корреляционные функции с![]() получаются, если исходные М-последовательности составляют предпочтительную пару, а для случая трех исходных М-последовательностей - предпочтительные тройки, при дополнительном условии выбора нормальных сдвигов М-последовательностей.
получаются, если исходные М-последовательности составляют предпочтительную пару, а для случая трех исходных М-последовательностей - предпочтительные тройки, при дополнительном условии выбора нормальных сдвигов М-последовательностей.
9. Последовательности Касами формируются из трех исходных М-последовательностей различной длины: первые две последовательности, составляющие предпочтительную пару с ![]()
![]() , имеют длину
, имеют длину ![]() ,
, ![]() - четное, а третья последовательность - длину
- четное, а третья последовательность - длину ![]() . Последовательности Касами имеют пятиуровневые корреляционные функции, но максимальное их значение не превышает
. Последовательности Касами имеют пятиуровневые корреляционные функции, но максимальное их значение не превышает ![]() . Объем ансамбля последовательностей Касами равен
. Объем ансамбля последовательностей Касами равен ![]() .
.
3.9. Вопросы для самопроверки и самостоятельной работы
1. Какие характеристики сигналов являются важнейшими при использовании их при РКФ в ААСС?
2. Какой вид сложных сигналов чаще всего используется в AACС и почему?
3. Как можно упростить процедуру вычисления КФ ФМ сложных сигналов, КФ AM сложных сигналов? Чем будут различаться эти процедуры для ФМ и АМ сложных сигналов?
4. Какие виды сложных сигналов рекомендуется использовать для получения сигналов с большой базой В, если быстродействие используемых МС не позволяет получать непосредственно двоичную последовательность длиной N = В?
5. Что такое линейная рекуррентная последовательность? Какие другие названия этих последовательностей еще известны?
6. Что такое нелинейная рекуррентная последовательность? Какое отличие ее от линейной рекуррентной последовательности по построению схемы формирования, объему ансамбля и корреляционным свойствам?
7. Что такое последовательность Гоулда? Как последовательности Гоулда отличаются от М-последовательностей по схеме формирования, объему ансамбля и корреляционным свойствам?
8. Какое правило может быть использовано при объединения нескольких двоичных последовательностей для формирования производных, составных сигналов?
9.Что такое номер М-последовательности? Существует ля связь между номерами М-последовательностей одинаковой длины?
10. Каковы отличительные положительные качества М-последовательностей? Каковы недостатки М-последовательностей?
11. Почему М-последовательность называется псевдослучайной последовательностью?
12. Сколькими способами можно получить любой циклический сдвиг М-последовательности в виде суммы циклических сдвигов, номера которых меньше степени проверочного полинома? Сколько слагаемых может быть в этих суммах?
13. Какой циклический сдвиг принимается за нулевой? Что имеют общего нулевые циклические сдвиги различных последовательностей?
14. В чем состоит сущность свойства децимации М-последовательности?
15. Оценить порядок отношения максимального бокового выброса к значению главного выброса КФ двух последовательностей, составляющих предпочтительную пару, при большой длине последовательности?
16. При какой степени проверочного полинома можно получить предпочтительные пары?
17. Какие нужно взять М-последовательности, чтобы на их основе сформировать последовательности Гоулда с трехуровневыми КФ? Каким будет максимальный выброс авто- и взаимной корреляционной функций последовательностей Гоулда?
18. Пользуясь рис.3.13, 3.15, ответить на вопрос о максимальном выбросе корреляционных функций для пар последовательностей;. 245-29, 245-5, 245-25.
19. Чем отличаются авто- и взаимные корреляционные функции следующих ансамблей последовательностей: М-последовательности (предпочтительные пары) и последовательности Гоулда на основе двух М-последовательностей (также предпочтительные пары)?
20. Что дает объединение трех М-последовательностей? Чем отличается большое множество последовательностей Касами от последовательностей Гоулда, сформированных на основе трех М-последовательностей (по объему ансамбля, схеме формирования, корреляционным свойствам)?
3.10. Задачи
3.1. По проверочному уравнению ![]() записать характеристическое уравнение, определить длину М-последовательности, нарисовать схему ее формирования.
записать характеристическое уравнение, определить длину М-последовательности, нарисовать схему ее формирования.
3.2. Записать М-последовательность, формируемую с помощью проверочного полинома ![]() , используя проверочное уравнение (3.3). Составить схему формирования М-последовательности и проверить, сформирует ли эта схема полученную последовательность.
, используя проверочное уравнение (3.3). Составить схему формирования М-последовательности и проверить, сформирует ли эта схема полученную последовательность.
З.З. Записать проверочные полиномы степени 5, если их восьмеричные представления 45, 75, 67. Какова длина М-последовательности?
3.4. Убедиться, что полином с восьмеричным представлением 75 имеет номер 3 (номер 1 имеет полином с восьмеричным представлением 45), ![]() .
.
3.5. Записать проверочные полиномы степени 7, если их восьмеричные представления 211, 367, 325. Записать обратные полиномы и представить их в восьмеричном виде. Проверить полученные результаты по таблице приложения 1.
3.6. Сформировать М-последовательность с проверочным полиномом 23. Определить число 0 и I в последовательности. Убедиться, что последовательность содержит все возможные комбинации по ![]() символов, кроме нулевой. Чему равно
символов, кроме нулевой. Чему равно ![]() ?
?
3.7. Представить периодическую корреляционную функцию М-последовательности длиной 7 и 15 на одном рисунке. Как будет меняться КФ при увеличении длины?
3.8. Определить порождающий полином М-последовательности, если проверочный полином a) ![]() , б)
, б) ![]() . По заданному проверочному уравнению сформировать М-последовательность и убедиться, что нулевой ее сдвиг описывается порождающим полиномом.
. По заданному проверочному уравнению сформировать М-последовательность и убедиться, что нулевой ее сдвиг описывается порождающим полиномом.
3.9. По проверочному полиному ![]() определить, какой циклический сдвиг дадут суммы по модулю 2 следующих сдвигов: а) нулевого и второго, б) второго и третьего, 3) нулевого и первого, г) нулевого и четвертого. Записать все сдвиги М-последовательности и, суммируя соответствующие сдвиги по модулю 2, убедиться в правильности полученных ответов.
определить, какой циклический сдвиг дадут суммы по модулю 2 следующих сдвигов: а) нулевого и второго, б) второго и третьего, 3) нулевого и первого, г) нулевого и четвертого. Записать все сдвиги М-последовательности и, суммируя соответствующие сдвиги по модулю 2, убедиться в правильности полученных ответов.
3.10. Проверочный полином М-последовательности ![]() . Определить, суммы каких двух циклических сдвигов дадут 6-й циклический сдвиг? Сколькими вариантами сумм из двух циклических сдвигов
. Определить, суммы каких двух циклических сдвигов дадут 6-й циклический сдвиг? Сколькими вариантами сумм из двух циклических сдвигов
можно получить каждый циклический сдвиг для заданной длины последовательности? Для любой длины последовательности? Задачу решить, выписав все циклические сдвиги.
3.11. Для длины 63 какие децимации приведут к образованию последовательностей той же длины?
3.12. Определить требуемое быстродействие микросхем, если требуется сформировать двоичную последовательность длительностью 10 мс. с базой ![]() . Какую базу можно реализовать при использовании МС серии 564, 133,106?
. Какую базу можно реализовать при использовании МС серии 564, 133,106?
3.13. Для М-последовательности с проверочным полиномом ![]() определить последовательность, образованную в результате децимаций по индексу 3. Определить номер полученной последовательности, ее проверочный полином (по табл. приложения 1). Провести проверку, используя понятие нулевого сдвига.
определить последовательность, образованную в результате децимаций по индексу 3. Определить номер полученной последовательности, ее проверочный полином (по табл. приложения 1). Провести проверку, используя понятие нулевого сдвига.
3.14. Определить предпочтительные пары, для проверочных полиномов степени ![]() : а)
: а) ![]() , б)
, б) ![]() , в)
, в) ![]() , г)
, г) ![]() , д)
, д) ![]() .
.
3.15. Определить исходные последовательности (номера и их полиномы) для образования большого множества последовательностей Касами длиной 63. Чему равен объем ансамбля? Составить схему формирования последовательностей Касами, используя полученные проверочные полиномы.
Ответы на задачи
1 раздел
1.1. а) ![]() , б)
, б) ![]() . 1.2. В 3 раза уменьшается. 1.3. При ЧРК 40 МГц, при ВРК - 8 МГц (ИКМ), 2 - 4 МГц (дельта-модуляция). 1.4. 10 телеграфных каналов. 1.5. а) 6,9, б) 13,8, в) 7,6, 3,8, 2,5. 1.6. а)
. 1.2. В 3 раза уменьшается. 1.3. При ЧРК 40 МГц, при ВРК - 8 МГц (ИКМ), 2 - 4 МГц (дельта-модуляция). 1.4. 10 телеграфных каналов. 1.5. а) 6,9, б) 13,8, в) 7,6, 3,8, 2,5. 1.6. а) ![]() , б)
, б) ![]() , в)
, в) ![]() ,
, ![]() ,
, ![]() . 1.7. а) 1, 1, 2, 5, 10. б) многопозиционное кодирование, так как каждым сигналом передается
. 1.7. а) 1, 1, 2, 5, 10. б) многопозиционное кодирование, так как каждым сигналом передается ![]() дв. ед. информации. 1.8. 69, 138, 25. Комбинационное разделение потребует в 5,5 раз или в 2,76 раз меньше средней мощности передатчика, но источники должны быть синхронными и работать на одинаковых или кратных скоростях. 1.9. а) при любом
дв. ед. информации. 1.8. 69, 138, 25. Комбинационное разделение потребует в 5,5 раз или в 2,76 раз меньше средней мощности передатчика, но источники должны быть синхронными и работать на одинаковых или кратных скоростях. 1.9. а) при любом ![]() сообщение не искажается, б)
сообщение не искажается, б) ![]() 1.11 б)
1.11 б) ![]() .
.
2 раздел
2.1. Либо мощность увеличить в 2 раза и перейти на противоположные сигналы (синхросигнал передается параллельно с информационным), либо полосу частот увеличить в 2 раза. 2.2. Противоположные сигналы - ka=200, ортогональные сигналы ka=210. 2.3. ![]() или
или ![]() . 2.4. Уровни внутрисистемных помех и внутренних шумов должны быть одинаковыми. 2.5. Увеличится вероятность ошибки в 2 раза, ka=40 или
. 2.4. Уровни внутрисистемных помех и внутренних шумов должны быть одинаковыми. 2.5. Увеличится вероятность ошибки в 2 раза, ka=40 или ![]() . 2.6.
. 2.6. ![]() . 2.7.
. 2.7. ![]() . 2.8. а)
. 2.8. а) ![]() , б)
, б) ![]() . 2.9.
. 2.9. ![]() . 2.10.
. 2.10. ![]() . 2.11. а)
. 2.11. а) ![]() , б)
, б) ![]() .
.
3 раздел
3.1. 1011, 7. 3.2. 1010011. 3.3. 100101, 111101, 110111, 31. 3.5. 10001001, 11110111, 11010101, 221, 357, 253. 3.6. 4,8. 3.8. а) ![]() , б)
, б) ![]() . 3.9. а) 3, б) 0, в) 5, г) 6. 3.10. С6=С4+С0=С5+С3=С2+С1, 3, (N-1)/2. 3.11. 1,2,4,8,16,32, 5,10,20,40, 17,34,11,22,44, 25,50,37, 13,26, 52,19,38,41, 23,46,29,58,53,43. 3.12.
. 3.9. а) 3, б) 0, в) 5, г) 6. 3.10. С6=С4+С0=С5+С3=С2+С1, 3, (N-1)/2. 3.11. 1,2,4,8,16,32, 5,10,20,40, 17,34,11,22,44, 25,50,37, 13,26, 52,19,38,41, 23,46,29,58,53,43. 3.12. ![]() нс. 3.13. 3,1101. 3.14. а) 1,3,7,15; б) 11,31,5,23; в)1,3,27,13, 39,47,7,5,15,43; г) 17,55,61,187,45,3; д) 103,125,1,149,91,119,61,83, 35,175,49,479. 3.15. 5,11,35; 147,155,013.
нс. 3.13. 3,1101. 3.14. а) 1,3,7,15; б) 11,31,5,23; в)1,3,27,13, 39,47,7,5,15,43; г) 17,55,61,187,45,3; д) 103,125,1,149,91,119,61,83, 35,175,49,479. 3.15. 5,11,35; 147,155,013.
Список литературы
1. Бессарбова А.А., Клыков М.В. О свойстве сдвига и сложения М-последовательностей. – Радиотехника, 1984, т.39, №3.
2. Варакин Л.Е. Теория систем сигналов. – М.: Советское радио, 1970. – 376 с.
3. Венедиктов М.Д., Марков В.В., Эйдус Г.С. Асинхронные адресные системы связи. – М.: Связь, 1968. – 271 с.
4. Диксон Р.К. Широкополосные системы: Пер. с англ. / Под ред. В.И. Журавлева. – М.: Связь, 1979. – 304с.
5. Кловский Д.Д. Теория передачи сигналов. – М.: Связь, 1973. – 376 с.
6. Скляр Б. Цифровая связь: Пер. с англ. /под ред. А.В. Назаренко. – М.: Вильямс, 2004. – 1104 с.
7. Многостанционный доступ в спутниковых системах связи / Венедиктов М.Д., Даниэлян С.А., Марков В.В., Эйдус Г.С. – М.: Связь, 1973. – 97 с.
8. Немировский М.С. Цифровая передача информации в радиосвязи. М.: Связь, 1980. - 256 с.
9. Пенин П.И. Системы передачи цифровой информации. - М.: Советское радио, 1976. - 368 с.
10. Питерсон У. Коды, исправляющие ошибки: Пер. с англ./Под ред, Р.Л. Добрушина. - М.: Мир, 1964. - 338 с.
11. Радиосистемы передачи информации / Тепляков И.М., Рощин Б.В., Фомин А.И., Вейцель В,А, - М,: Радио и связь, 1982. - 264 с.
12. Сарвате Д.В., Персли М.Б. Взаимнокорреляционные свойства псевдослучайных и родственных последовательностей. - ТИИЭР, I980, т.68, № 5, с.59-90.
13. Сикарев А.А., Лебедев О.Н. Микроэлектронные устройства формирования и обработки сложных сигналов. - М.: Радио и связь, 1983. - 216 с.
14. Спилкер Дж. Цифровая спутниковая связь: Пер. с англ. /Под ред, В.В.Маркова. - М.: Связь, 1976. - 592 с.
15. Теория передачи сигналов /Зюко А.Г., Кловский Д.Д., Назаров М.В., Финк Л.М. - М.: Связь, 1980. - 288 с.
16. Тузов Г.И. Статистическая теория приема сложных сигналов. - М.: Советское радио, 1977. - 400 с.
17. Цифровые методы в космической связи /Под ред. С.У. Голомба /Пер с англ. /Под ред. В.И. Шляпоберского. - М.: Связь, 1969. - 271 с.
18. Шумоподобные сигналы в системах передачи информации /Под ред В.Б. Пестрякова. - М.: Советское радио, 1973. - 424 с.
19. Корн Г. Моделирование случайных процессов на аналоговых и аналогово-цифровых машинах: Пер. с англ./ под ред. Е.В. Доброва. – М.: Мир, 1968. – 315 с.
20. Патент РФ №2208288, 10.08.03; Н 03 В 29/00, G 06 F 7/58.
21. Патент РФ № 2205495, 10.07.03; Н 03 В 29/00.
22. Финк Л.М. Теория передачи дискретных сообщений. – М.: Совю радио, 1970. – 102 с.
23. Петрович Н.Т. Размахнин М.К. – М.: Сов. Радио, 1969. – 230 с.
24. Радиотехнические системы / Ю.П. Гришин, В.П. Ипатов и др; Под ред. Ю.М. Казаринова. – М.: Высш. шк., 1990. – 496 с.