Работа приемника в многопозиционных системах сводится к различению m сигналов, соответствующих m позициям кода. Схему приемника можно представить себе состоящей из m каналов (ветвей), каждый из которых рассчитан на прием одного определенного сигнала. Одним из примеров многопозиционной системы является система с частотной манипуляцией, в которой сигналы представляют собой гармонические колебания различных частот. Приемник в этой системе содержит m фильтров, настроенных на частоты передаваемых Сигналов. С помощью этих фильтров и осуществляется разделение (различение) сигналов.
Пусть s![]() t), s2(t),..., sm(t) — сигналы, используемые для передачи, и w(t) — аддитивная помеха, воздействующая на приемник. Принимаемые сигналы при этом будут x
t), s2(t),..., sm(t) — сигналы, используемые для передачи, и w(t) — аддитивная помеха, воздействующая на приемник. Принимаемые сигналы при этом будут x![]() ,x
,x![]() ,..., xm. Если передавался сигнал s
,..., xm. Если передавался сигнал s![]() (t), то в первом фильтре будут сигнал и помеха
(t), то в первом фильтре будут сигнал и помеха ![]() ,а в остальных фильтрах — только помеха. Приемник сравнивает принятые сигналы и воспроизводит наибольший из них, т. е. выносит решение о том, что передан k-й сигнал, если
,а в остальных фильтрах — только помеха. Приемник сравнивает принятые сигналы и воспроизводит наибольший из них, т. е. выносит решение о том, что передан k-й сигнал, если ![]() . Поскольку мы предположили, что передавался сигнал s
. Поскольку мы предположили, что передавался сигнал s![]() , это вероятность правильного решения будет равна:
, это вероятность правильного решения будет равна:
![]()
а вероятность ошибки
![]()
Оптимальный когерентный приемник в m-позиционной системе представляет собой многоканальный коррелятор или систему из т согласованных фильтров. Структурная схема такого приемника аналогична схемам рис. 5.6 или рис. 5.7 для двоичных сигналов (разница лишь в числе каналов). В этом случае приемник в соответствии с условиями (5.33) вычисляет функцию взаимной корреляции принятого сигнала x(t) со всеми т опорными сигналами
 (5.58)
(5.58)
и выдает решение о том, что был передан тот сигнал, для которого корреляция имеет наибольшее значение. Вероятность правильного решения (если передается сигнал s![]() ) будет равна:
) будет равна:
![]() (5.59)
(5.59)
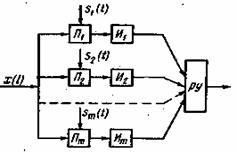
Рис. 5.8. Оптимальный когерентный приемник многопозиционных сигналов
На рис. 5.8 приведена структурная схема когерентного приемника ,много-позиционных сигналов, построенная на базе корреляционной техники. В каждом канале этой схемы производятся синхронное детектирование принятых, сигналов, интегрирование и отсчет в конце каждого элемента сигнала. Полученные отсчеты поступают на схему сравнения (решающее устройство РУ). В результате сравнения выдается решение о том, какой из т сигналов был передан.
Определим вероятность ошибки при оптимальном когерентном приеме Ортогональных m-позиционных сигналов. Будем полагать, что все (возможные сигналы равновероятны и имеют одинаковую энергию Е. Для этого случая условия правильного приема сигнала s![]() согласно (5.33) запишутся
согласно (5.33) запишутся

Так как ![]() ,
, и
и  , то это неравенство принимает вид г
, то это неравенство принимает вид г
 (5.60)
(5.60)
Или
 (5.61)
(5.61)
Рассмотрим функцию  , представляющую собой нормальную случайную величину (помеху на выходе j-го канала) с дисперсией
, представляющую собой нормальную случайную величину (помеху на выходе j-го канала) с дисперсией
![]()
Плотность вероятности величины |![]()
Вероятность того, что помеха в j-м канале не превысит суммарного значения сигнала и помехи в первом канале, т. е. вероятность того, что ![]() , будет равна:
, будет равна:
 , где
, где
 ,
,![]()
Вероятность того, что помеха во всех m— 1 каналах без сигнала не превысит суммарного значения сигнала и помехи в первом канале,
![]()
Интегрирование этого выражения по всем возможным значениям помехи |![]() дает вероятность правильного приема
дает вероятность правильного приема
 (5.62)
(5.62)
Вероятность ошибки при этом
 (5.63)
(5.63)
В частном случае при m=2 выражение (5.63) преобразовывается в ф-лу (5.51) для двоичных систем
![]()
При m>2 интеграл в правой части (5.63) может быть вычислен приближенными методами. При относительно больших значениях отношения сигнала к помехе (q0>1) имеет место асимптотическое выражение
![]() (5.64)
(5.64)
При неоптимальном когерентном приеме дискретных сигналов в схеме рис. 5.8 интегратор отсутствует. В этом случае после синхронного детектора ставится фильтр нижних частот и берется отсчет (стробирование) на выходе фильтра в середине посылки. Можно показать, что вероятность ошибки при неоптимальном когерентном приема определяется полученными выше выражениями (5.63) и (5.64), если в последних вместо q0 подставить ![]()