4.2.1. Помехоустойчивость частотной модуляции
4.2.2. Методы осуществления частотной модуляции
4.2.3. Особенности построения высокочастотного тракта передатчиков с частотной модуляцией
Частотная и фазовая модуляции являются разновидностями угловой модуляции, при которой по закону модулирующего напряжения изменяется полная фаза высокочастотных колебаний. При этом мгновенное значение тока высокой частоты можно представить выражением:
![]() , (4.1)
, (4.1)
где ![]() индекс угловой модуляции, который определенным образом зависит от модулирующего напряжения и представляет собой амплитуду изменения фазы колебаний в процессе модуляции. Мгновенная частота и полная фаза колебаний связаны соотношениями:
индекс угловой модуляции, который определенным образом зависит от модулирующего напряжения и представляет собой амплитуду изменения фазы колебаний в процессе модуляции. Мгновенная частота и полная фаза колебаний связаны соотношениями:
![]() , (4.2)
, (4.2)

Отсюда следует, что всякая модуляция фазы колебаний означает модуляцию их частоты, и наоборот. Различия между фазовой и частотной модуляциями обусловлены разным характером зависимости индексов модуляции от параметров модулирующего напряжения. Выражение (4.1) можно представить в виде бесконечного ряда:
![]() ,
,
где Jn(j1) функции Бесселя первого рода n-го порядка от аргумента ![]() . Напомним, что
. Напомним, что
![]()
Кривые зависимостей бесселевых функций первого рода Jn(j1) от аргумента j1 , то есть от индекса модуляции, при значениях n= 0¸7 показаны на рис. 4.1а. Таким образом, при угловой модуляции чистым тоном одной звуковой частоты W спектр модулированных колебаний имеет среднюю частоту ![]() (при n=0) и бесконечное число пар боковых частот
(при n=0) и бесконечное число пар боковых частот ![]() ( при n = 1, 2, 3, ...) рис.4.2а. Амплитуды всех составляющих спектра сигнала с угловой модуляцией определяются соответствующими значениями функций Бесселя Jn(j1), зависящими от аргумента
( при n = 1, 2, 3, ...) рис.4.2а. Амплитуды всех составляющих спектра сигнала с угловой модуляцией определяются соответствующими значениями функций Бесселя Jn(j1), зависящими от аргумента ![]() индекса угловой модуляции и от порядка функции n, то есть от порядкового номера составляющей спектра. Как видно из рис.4.1а, при угловой модуляции, в отличие от амплитудной, все составляющие спектра модулированного сигнала несут информацию, в том числе и средняя частота
индекса угловой модуляции и от порядка функции n, то есть от порядкового номера составляющей спектра. Как видно из рис.4.1а, при угловой модуляции, в отличие от амплитудной, все составляющие спектра модулированного сигнала несут информацию, в том числе и средняя частота ![]() : функция Бесселя нулевого порядка J0(j1), определяющая амплитуду средней частоты
: функция Бесселя нулевого порядка J0(j1), определяющая амплитуду средней частоты ![]() , при определенных значениях аргумента
, при определенных значениях аргумента ![]() проходит через 0 (
проходит через 0 (![]() = 2,405; 5,52; 8,65; 11,79 и т.д.), при этих значениях
= 2,405; 5,52; 8,65; 11,79 и т.д.), при этих значениях ![]() спектр модулированных колебаний не содержит составляющей средней частоты
спектр модулированных колебаний не содержит составляющей средней частоты ![]() (при амплитудной модуляции информацию содержат только боковые частоты
(при амплитудной модуляции информацию содержат только боковые частоты ![]() , амплитуда которых зависит от глубины модуляции m, то есть от амплитуды модулирующего сигнала частоты W, а амплитуда несущей частоты
, амплитуда которых зависит от глубины модуляции m, то есть от амплитуды модулирующего сигнала частоты W, а амплитуда несущей частоты ![]() постоянна как при наличии, так и при отсутствии модуляции).
постоянна как при наличии, так и при отсутствии модуляции).

Рис.4.1
При индексе модуляции ![]() = 0 (то есть при отсутствии модуляции) J0(j1)=1, а амплитуды составляющих всех боковых частот равны нулю. Чем больше индекс модуляции
= 0 (то есть при отсутствии модуляции) J0(j1)=1, а амплитуды составляющих всех боковых частот равны нулю. Чем больше индекс модуляции ![]() , тем медленнее убывают с ростом порядкового номера n значения Jn(j1).
, тем медленнее убывают с ростом порядкового номера n значения Jn(j1).
Так как амплитуда тока высокой частоты ![]() во время угловой модуляции не меняется, то и мощность P~г, отдаваемая генератором, тоже постоянна (при условии, что величина
во время угловой модуляции не меняется, то и мощность P~г, отдаваемая генератором, тоже постоянна (при условии, что величина ![]() колебательного контура постоянна на всех частотах спектра модулированных колебаний). В процессе модуляции отдаваемая генератором мощность перераспределяется между боковыми частотами
колебательного контура постоянна на всех частотах спектра модулированных колебаний). В процессе модуляции отдаваемая генератором мощность перераспределяется между боковыми частотами ![]() , при этом сумма мощностей боковых частот и средней частоты остается неизменной. Это можно доказать и математически, если вспомнить о свойстве бесселевых функций:
, при этом сумма мощностей боковых частот и средней частоты остается неизменной. Это можно доказать и математически, если вспомнить о свойстве бесселевых функций:
![]()
Итак, при угловой модуляции мощность, отдаваемая генератором, постоянна при наличии и при отсутствии модуляции, тогда как при амплитудной модуляции она изменяется в широких пределах (при m=0 - P~г=P~ н, а при m = 1-P~г=P~max=4P~н ).
Полоса частот, занимаемая сигналом с угловой модуляцией одним тоном F, равна П=2nF. Однако, при радиосвязи достаточно передавать только те составляющие спектра, амплитуды которых больше 15% от амплитуды колебаний без модуляции. При этом число боковых составляющих спектра n принимают равным j1: из приведенных на рис.4.1б кривых бесселевых функций первого рода Jn(j1) при постоянном значении аргумента j1 и различных значениях порядкового номера n видно, что амплитуды боковых частот, порядковый номер n которых больше индекса модуляции φ1 (n >j1), можно не учитывать, поскольку их амплитуды равны или меньше 0,15. Тогда ширину спектра колебаний с угловой модуляцией одним тоном низкой частоты F можно принять равной
П= 2j1F (4.3)
Рассмотрим теперь особенности фазовой и частотной модуляций.
4.1. Фазовая модуляция
При фазовой модуляции индекс модуляции ![]() пропорционален только амплитуде модулирующего напряжения и не зависит от его частоты:
пропорционален только амплитуде модулирующего напряжения и не зависит от его частоты:
![]() (4.4)
(4.4)
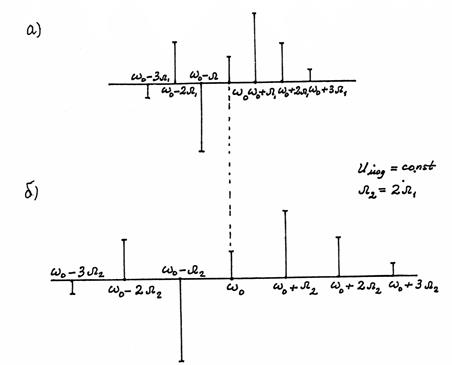
Рис.4.2
Если амплитуда ![]() постоянна, а модулирующая частота F изменяется, то число боковых частот n и их амплитуды остаются неизменными, а изменяется их положение в спектре сигнала относительно средней частоты (рис.4.2а и б). При этом согласно (4.3) :
постоянна, а модулирующая частота F изменяется, то число боковых частот n и их амплитуды остаются неизменными, а изменяется их положение в спектре сигнала относительно средней частоты (рис.4.2а и б). При этом согласно (4.3) :
![]() (4.5)
(4.5)
Итак, при фазовой модуляции ширина спектра, занимаемого сигналом ,![]() , при постоянной амплитуде модулирующего напряжения зависит от модулирующей частоты F, структура спектра при этом не меняется, то есть не меняются число составляющих спектра и их амплитуды. Если индекс модуляции
, при постоянной амплитуде модулирующего напряжения зависит от модулирующей частоты F, структура спектра при этом не меняется, то есть не меняются число составляющих спектра и их амплитуды. Если индекс модуляции ![]() £ 1, то
£ 1, то ![]() =2F, то есть ширина спектра такая же, как при амплитудной модуляции. Фазовую модуляцию при
=2F, то есть ширина спектра такая же, как при амплитудной модуляции. Фазовую модуляцию при ![]() £1 называют узкополосной.
£1 называют узкополосной.
4.2. Частотная модуляция (ЧМ)
При частотной модуляции по периодическому закону изменяется частота колебаний w:
w = w0 + DwcosWt ,
где ![]() амплитуда отклонения частоты от некоторого среднего значения, носящая название девиации частоты, она пропорциональна амплитуде модулирующего сигнала низкой частоты Uмод:
амплитуда отклонения частоты от некоторого среднего значения, носящая название девиации частоты, она пропорциональна амплитуде модулирующего сигнала низкой частоты Uмод:
![]() (4.6)
(4.6)
Можно показать, что мгновенное значение тока высокой частоты при частотной модуляции определяется выражением:
![]() , (4.7)
, (4.7)
где ![]() индекс частотной модуляции:
индекс частотной модуляции:
![]() (4.8)
(4.8)
Легко видеть, что выражения для колебаний, модулированных по фазе формула (4.1) и по частоте формула (4.7) идентичны. Это можно было предвидеть, исходя из физических соображений. Однако, между колебаниями, модулированными по фазе и по частоте есть существенная разница: индекс фазовой модуляции ![]() (4.3) не зависит от модулирующей частоты F, тогда как индекс частотной модуляции
(4.3) не зависит от модулирующей частоты F, тогда как индекс частотной модуляции ![]() (4.8) от нее зависит. Отсюда следует, что если изменить частоту F модулирующего напряжения при его неизменной амплитуде
(4.8) от нее зависит. Отсюда следует, что если изменить частоту F модулирующего напряжения при его неизменной амплитуде![]() , то изменится индекс частотной модуляции
, то изменится индекс частотной модуляции ![]() . Это приведет к изменению амплитуд всех составляющих спектра и , что самое важное, к изменению их числа n. Что касается ширины спектра, то нетрудно показать, что она остается постоянной. Если учитывать только те составляющие спектра, амплитуды которых больше 15% от амплитуды сигнала без модуляции (при этом сохраняются составляющие спектра, мощность которых больше 2% мощности без модуляции) то подставляя (4.8) в (4.3), получим, что полоса частот, занимаемая спектром, равна:
. Это приведет к изменению амплитуд всех составляющих спектра и , что самое важное, к изменению их числа n. Что касается ширины спектра, то нетрудно показать, что она остается постоянной. Если учитывать только те составляющие спектра, амплитуды которых больше 15% от амплитуды сигнала без модуляции (при этом сохраняются составляющие спектра, мощность которых больше 2% мощности без модуляции) то подставляя (4.8) в (4.3), получим, что полоса частот, занимаемая спектром, равна:
![]() (4.9)
(4.9)
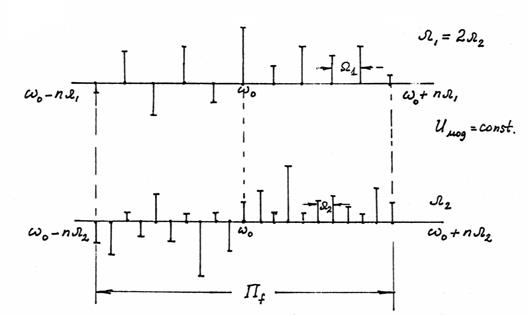
Рис.4.3
В самом деле, допустим, что Df= 50 кГц, a F = 50 Гц; при этом ![]() , а ширина полосы Пf=2×103×50=100кГц. Спектр содержит по 1000 составляющих слева и справа от средней частоты
, а ширина полосы Пf=2×103×50=100кГц. Спектр содержит по 1000 составляющих слева и справа от средней частоты ![]() , расстояние между соседними составляющими спектра по оси частот равно 50 Гц. Если F = 10 кГц, то
, расстояние между соседними составляющими спектра по оси частот равно 50 Гц. Если F = 10 кГц, то ![]() , и ширина полосы Пf=2×5×10×103=100кГц. В этом случае спектр содержит всего по 5 составляющих слева и справа от частоты f0 , но расстояние между соседними составляющими спектра по оси частот равно 10 кГц. Таким образом, ширина спектра колебаний, модулированных по частоте, при неизменной амплитуде модулирующего напряжения остается постоянной, меняется лишь структура спектра число боковых частот и амплитуды боковых частот и средней частоты
, и ширина полосы Пf=2×5×10×103=100кГц. В этом случае спектр содержит всего по 5 составляющих слева и справа от частоты f0 , но расстояние между соседними составляющими спектра по оси частот равно 10 кГц. Таким образом, ширина спектра колебаний, модулированных по частоте, при неизменной амплитуде модулирующего напряжения остается постоянной, меняется лишь структура спектра число боковых частот и амплитуды боковых частот и средней частоты ![]() (рис.4.3 ).
(рис.4.3 ).
Следует отметить, что при малом индексе частотной модуляции, когда ![]() , полоса частот, занимаемая сигналом, определяется наивысшей частотой модуляции Fmax , а не девиацией частоты Df . Индекс
, полоса частот, занимаемая сигналом, определяется наивысшей частотой модуляции Fmax , а не девиацией частоты Df . Индекс ![]() соответствует узкополосной частотной модуляции, при этом ширина полосы , занимаемой сигналом, равна Пfузк=2Fmax, то есть такая же как при амплитудной модуляции.
соответствует узкополосной частотной модуляции, при этом ширина полосы , занимаемой сигналом, равна Пfузк=2Fmax, то есть такая же как при амплитудной модуляции.
В заключение следует отметить, что при высококачественном радиовещании необходимо передавать составляющие спектра, амплитуда которых больше 0,01 амплитуды колебаний без модуляции. При этом ширина спектра модулированного по частоте сигнала определяется эмпирической формулой Манаева:
![]()
В России девиация частоты при высококачественном радиовещании принята равной Df =50 кГц, тогда при Fmin=50Гц полоса частот, занимаемая радиосигналом Пfmin=103кГц, а при Fmax=15кГц Пfmax=183кГц (таблица 4.1), то есть при изменении модулирующей частоты в 300 раз полоса частот, занимаемая модулированным по частоте сигналом, увеличивается приблизительно на 80%, то есть менее, чем вдвое. На практике для передачи сигнала с частотной модуляцией при высококачественном радиовещании отводится канал шириной 250кГц, т.е. он во много раз шире полосы сигнала с амплитудной модуляцией. По этой причине частотная модуляция используется в диапазоне УКВ.
Таблица 4.1
| ∆f=50кГц | ||
| F,Гц | φ1, радиан | П,кГц |
| 50 | 1000 | 103 |
| 100 | 500 | 105 |
| 1000 | 50 | 118 |
| 3000 | 16,6 | 130 |
| 5000 | 10 | 142 |
| 10000 | 5 | 165 |
| 15000 | 3,33 | 183 |
4.2.1. Помехоустойчивость частотной модуляции
Большим достоинством частотной модуляции, наряду с её высокими экономическими показателями, является высокая помехоустойчивость. Причину этого можно пояснить следующим образом. Как известно, блок-схема приемника ЧМ сигнала всегда содержит ограничитель и частотный детектор. Предположим, что на вход частотного детектора поступают синусоидальное напряжение сигнала Uc вектор ОА (рис 4.4), и меньшее по амплитуде синусоидальное напряжение помехи Uп вектор АВ.
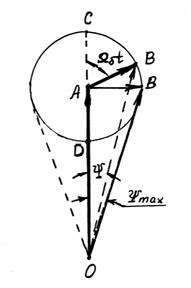
Рис.4.4
Обозначим отношение Uс/Uп=p. Если предположить, что плоскость рисунка вращается с угловой скоростью вектора ОА, то этот вектор будет неподвижным, а вектор помехи АВ, частота которой отличается от частоты сигнала, будет вращаться вокруг неподвижного вектора ОА c угловой частотой Wб, равной разности угловых частот сигнала и помехи, т.е. Wб=wсwп. При этом происходит изменение длины результирующего вектора ОВ от OD до OC и изменение его фазы в пределах угла ±Y. Если напряжение сигнала по крайней мере вдвое больше напряжения помехи, т.е. угол Y£300, то максимальный угол отклонения результирующего вектора приблизительно равен:
Ymax=аrctg (АВ/ОА)»АВ/ОА=Uп/Uс =1/р
Точно такой же максимальный угол отклонения результирующего вектора Ymax будет и на выходе ограничителя. Изменение амплитуды будет устранено ограничителем. При р>2 можно считать, что угол отклонения Y результирующего вектора от исходного положения будет изменяться во времени по синусоидальному закону:
Y»YmaxsinWбt
Таким образом, на входе частотного детектора появляется обусловленная напряжением помехи паразитная фазовая модуляция, которая согласно (4.2) сопровождается частотной модуляцией с индексом Dwп=WбY=Wб/р,
т.е. в результате действия помехи на выходе ограничителя появляются колебания, модулированные по частоте с девиацией Df=Fб/р, где Fб=fcfп. Если полезный сигнал промодулирован по частоте с девиацией Dfc, то отношение сигнал/помеха на выходе частотного детектора будет равно:
![]()
![]() (4.10)
(4.10)
Из (4.10) следует, что если девиация частоты сигнала с частотной модуляцией равна 50кГц, а разность между частотами сигнала и помехи составляет 1кГц, то на выходе частотного детектора отношение сигнал/помеха в 50 раз больше, чем на выходе ограничителя. При этом больше подавляются помехи с частотами, близкими к средней частоте f0, которые в меньшей степени подавляются системой контуров приемника.
На практике на входе частотного детектора приемника может действовать напряжение помех сложной формы. Анализ показывает, что выигрыш (Q) в отношении сигнал/помеха, т.е. в помехоустойчивости, при частотной модуляции по сравнению с амплитудной модуляцией для гладких или флуктуационных помех составляет Qф=1.73j1fmax, а для импульсных Qи=2j1fmax, где j1fmax =![]() . Здесь j1fmax индекс частотной модуляции при наивысшей модулирующей частоте Fmax. Для обеспечения помехоустойчивости ЧМ передатчика требуется, чтобы величина j1fmax =23. В настоящее время в России при высококачественном радиовещании принята девиация частоты Dfс=50 кГц при наивысшей модулирующей частоте Fв=15кГц, при этом индекс модуляции j1fmax»3,3.
. Здесь j1fmax индекс частотной модуляции при наивысшей модулирующей частоте Fmax. Для обеспечения помехоустойчивости ЧМ передатчика требуется, чтобы величина j1fmax =23. В настоящее время в России при высококачественном радиовещании принята девиация частоты Dfс=50 кГц при наивысшей модулирующей частоте Fв=15кГц, при этом индекс модуляции j1fmax»3,3.
4.2.2. Методы осуществления частотной модуляции
В радиопередающих устройствах широко применяются два метода частотной модуляции: косвенный и прямой.
4.2.2.1. Косвенные методы частотной модуляции
При косвенном методе колебания, модулированные по частоте, получают в результате фазовой модуляции интегральной функцией модулирующего сигнала (рис.4.5а). В самом деле, в схеме, показанной на рис.4.5а, при ![]()
![]() , где
, где ![]() самая низкая модулирующая частота , напряжение UвхW ,действующее на входе фазового модулятора, равно:
самая низкая модулирующая частота , напряжение UвхW ,действующее на входе фазового модулятора, равно:
![]()
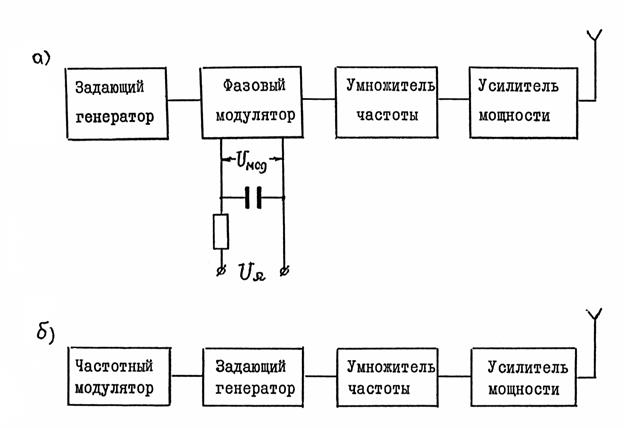
Рис.4.5
При этом фазовая модуляция будет иметь индекс ![]() , который обратно пропорционален модулирующей частоте, то есть на выходе фазового модулятора будут колебания с частотной модуляцией. Основным достоинством косвенных методов частотной модуляции является возможность обеспечения сколь угодно высокой стабильности средней частоты
, который обратно пропорционален модулирующей частоте, то есть на выходе фазового модулятора будут колебания с частотной модуляцией. Основным достоинством косвенных методов частотной модуляции является возможность обеспечения сколь угодно высокой стабильности средней частоты ![]() , поскольку модуляция осуществляется в одном из промежуточных каскадов возбудителя, а не в автогенераторе. К недостаткам косвенных методов следует отнести значительные трудности, возникающие при необходимости осуществления глубокой (широкополосной) частотной модуляции.
, поскольку модуляция осуществляется в одном из промежуточных каскадов возбудителя, а не в автогенераторе. К недостаткам косвенных методов следует отнести значительные трудности, возникающие при необходимости осуществления глубокой (широкополосной) частотной модуляции.
4.2.2.2. Прямые методы частотной модуляции
При прямых методах частотной модуляции модулирующим напряжением звуковой частоты воздействуют через частотный модулятор непосредственно на задающий автогенератор, изменяя его частоту (рис.4.5б).
Частотные модуляторы представляют собой управляемые реактивные сопротивления, величина которых изменяется по закону низкочастотного модулирующего сигнала. Основными требованиями, предъявляемыми к частотным модуляторам, являются: безынерционность (время переходных процессов должно быть намного меньше периода наивысшей модулирующей частоты); линейность модуляционной характеристики ![]() ; максимально возможная девиация частоты
; максимально возможная девиация частоты ![]() , не ухудшающая стабильности средней частоты
, не ухудшающая стабильности средней частоты ![]() ; постоянство девиации частоты по диапазону; минимальный уровень паразитной амплитудной модуляции (ПАМ) и др. В качестве частотных модуляторов используют реактивные лампы и диоды, транзисторы, варикапы и др.
; постоянство девиации частоты по диапазону; минимальный уровень паразитной амплитудной модуляции (ПАМ) и др. В качестве частотных модуляторов используют реактивные лампы и диоды, транзисторы, варикапы и др.
Методы поддержания стабильности средней частоты
Основным недостатком прямых методов частотной модуляции является низкая стабильность средней частоты: при осуществлении модуляции частота задающего автогенератора под воздействием частотного модулятора должна изменяться в сравнительно широких пределах и, вместе с тем, средняя частота ![]() должна иметь высокую стабильность. Для удовлетворения этих противоречивых требований используются специальные методы поддержания стабильности средней частоты схемы с автоматической подстройкой частоты (АПЧ), интерполяционный метод, описанный в 2.2.7, и др.
должна иметь высокую стабильность. Для удовлетворения этих противоречивых требований используются специальные методы поддержания стабильности средней частоты схемы с автоматической подстройкой частоты (АПЧ), интерполяционный метод, описанный в 2.2.7, и др.
При использовании интерполяционного метода (рис.2.18) диапазонным (интерполяционным) генератором является генератор с частотной модуляцией. Для обеспечения высокой стабильности средней частоты интерполяционное число N= fкв /fc должно быть как можно больше (здесь fкв частота кварцевого генератора, fc средняя частота генератора с частотной модуляцией). Величину N ограничивают возможности селектора. Обычно N £ 20. На рис.4.6а показана простейшая структурная схема осуществления автоматической подстройки средней частоты в передатчике с ЧМ. В этой схеме напряжение с выхода ЧМ Генератора, работающего на частоте fг, поступает на дискриминатор, колебательная система которого настроена на эту же частоту. При изменении частоты генератора относительно частоты дискриминатора на выходе последнего появляется напряжение, закон изменения которого соответствует закону изменения частоты генератора. Это напряжение поступает на частотный модулятор, управляющий частотой генератора. Если бы схема рис.4.6а не содержала корректирующего четырехполюсника, выполненного в виде потенциометра RC, частотная модуляция была бы невозможна, поскольку из-за АПЧ происходила бы демодуляция сигнала.
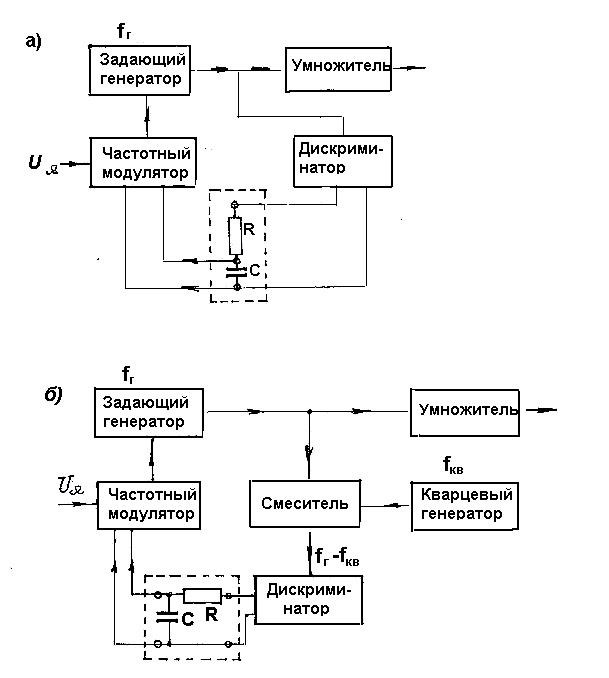
Рис.4.6
Благодаря корректирующему четырехполюснику параметры которого должны удовлетворять неравенству:
![]() << R ,
<< R ,
где Wн самая низкая модулирующая звуковая частота, напряжение, появляющееся на выходе дискриминатора из-за частотной модуляции, не поступает на вход частотного модулятора. Изменения частоты из-за нестабильности генератора очень медленные, поэтому здесь дискриминатор на процесс модуляции не влияет. Так как в схеме рис.4.6а колебательные системы генератора и дискриминатора настроены на одну и ту же частоту, то если раньше, без АПЧ, нестабильность частоты определялась колебательным контуром генератора, то теперь она в такой же степени определяется контуром дискриминатора. От этого недостатка свободна схема, приведенная на рис.4.6б, где дискриминатор работает на значительно более низкой частоте, поскольку его колебательный контур настроен на разностную частоту (fг fкв), при этом, как было показано ранее (см.2.5.1), эталонность контура намного выше. Схема АПЧ с кварцевым гетеродином существенно повышает стабильность средней частоты ЧМ генератора, поэтому она получила широкое распространение.
Частотные модуляторы на реактивных лампах
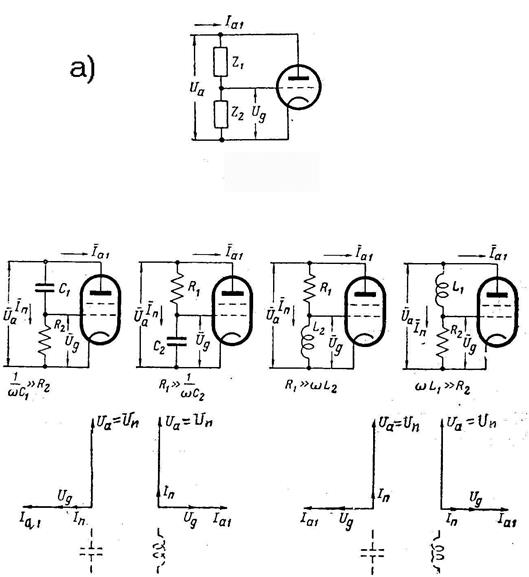
В качестве частотных модуляторов используют реактивные лампы, представляющие собой реактивный двухполюсник, сопротивление которого носит чисто реактивный характер и зависит от величины модулирующего напряжения, приложенного к управляющей сетке лампы. Все схемы реактивных лампы построены так, что колебательный контур модулируемого генератора подключен к потенциометру, состоящему из двух сопротивлений Z1 и Z2, включенных последовательно между анодом и катодом реактивной лампы, одно из них всегда активное, а другое реактивное (рис.4.7а), причем Z1 >> Z2. Напряжение со всего потенциометра Uп подается на анод реактивной лампы, а с его части с сопротивления Z2 на ее управляющую сетку. Сопротивление ![]() потенциометра равно:
потенциометра равно:
![]() .
.
Здесь Sср средняя крутизна: Sср= ![]() , где Uупр = Ug DUк, но при малой проницаемости D, а в качестве реактивных ламп используют всегда многоэлектродные лампы, Sср @
, где Uупр = Ug DUк, но при малой проницаемости D, а в качестве реактивных ламп используют всегда многоэлектродные лампы, Sср @ ![]() . Поско0льку Sср=S×a1( 1 соsq ) (см.1.6 ), а
. Поско0льку Sср=S×a1( 1 соsq ) (см.1.6 ), а  , то при изменении напряжения смещения Еg на управляющей сетке реактивной лампы изменяется средняя крутизна Sср, а следовательно и величина сопротивления Z.
, то при изменении напряжения смещения Еg на управляющей сетке реактивной лампы изменяется средняя крутизна Sср, а следовательно и величина сопротивления Z.
На рис.4.7б приведены варианты схем потенциометра и соответствующие им векторные диаграммы. Сопротивление Z будет чисто реактивным при условии, что фазовый сдвиг Y между напряжением Uа= Uп и током Iа1 равен 900.
Можно показать, что относительное изменение частоты генератора при использовании реактивной лампы определяется формулой:
![]() ,
,
где р коэффициент связи реактивной лампы с колебательным контуром генератора, r характеристическое сопротивление его колебательного контура, n=![]() , Емод – модулирующее напряжение низкой частоты на управляющей сетке реактивной лампы. Таким образом, линейная зависимость
, Емод – модулирующее напряжение низкой частоты на управляющей сетке реактивной лампы. Таким образом, линейная зависимость ![]() возможна при условии, что производная
возможна при условии, что производная ![]() при изменении Емод постоянна. Возможны два режима работы реактивной лампы: в режиме колебаний класса А и класса В.
при изменении Емод постоянна. Возможны два режима работы реактивной лампы: в режиме колебаний класса А и класса В.
При работе в режиме колебаний класса А амплитуда переменного напряжения на управляющей сетке реактивной лампы должна быть мала, для этого Z1 должно быть значительно больше Z2 (обычно n ³10 ). При q=1800Sср=S крутизне статической характеристики лампы.
б)
Рис.4.7
Известно, что производная ![]() постоянна при S£ 0,5Smax, поэтому рабочая точка лампы должна быть при значении Еg, которому соответствует крутизна S'=0,25Smax, при этом DS = 0,25Smax, и максимальное значение относительного отклонения частоты равно:
постоянна при S£ 0,5Smax, поэтому рабочая точка лампы должна быть при значении Еg, которому соответствует крутизна S'=0,25Smax, при этом DS = 0,25Smax, и максимальное значение относительного отклонения частоты равно:
![]() .
.
При работе реактивной лампы в режиме колебаний класса В допускают меньшую величину n ради увеличения девиации частоты. Величина средней крутизны Sср= S / ai (q). Как известно (см.1.7.2 ), величина 1/ai (q) изменяется линейно при 600 < q <1200. Если рабочая точка выбрана при q=900 , то
DSср= 0,5×S[ 1/ ai (1200) 1/ ai (600) ] » 0,3×S,
при этом
![]() .
.
(ai (1200) = 0,807, ai (600) = 0,2 ).
Эта величина больше, чем при работе реактивной лампы в режиме колебаний класса А, поскольку здесь меньше значение n.
Выше предполагалось, что фазовый сдвиг Y между напряжением Uа=Uп и током Ia1 равен 900, в действительности Y ¹ 900. Это объясняется рядом причин.
Во-первых, потенциометр, составленный из двух сопротивлений, реактивного и активного, не может обеспечить фазовый сдвиг между напряжением Uа и током Iа1 равный точно 900.
Во-вторых, не учитывался ток потенциометра: сопротивление потенциометра Zаб было принято равным отношению ![]() , тогда как в действительности оно определяется отношением
, тогда как в действительности оно определяется отношением ![]() , где Iп ток потенциометра, который может вызвать дополнительный фазовый сдвиг.
, где Iп ток потенциометра, который может вызвать дополнительный фазовый сдвиг.
В-третьих, не была учтена реакция анода.
При Y ¹ 900 реактивная лампа вносит в колебательный контур генератора не только реактивное сопротивление, но и активное, в результате при модуляции изменяется не только частота колебаний, но и их амплитуда, т.е. появляется ПАМ. При работе реактивной лампы в режиме колебаний класса А, где Z1 >> Z2, уровень ПАМ меньше. Можно показать, что требуемую величину n определяет неравенство n>10Q× , где Q – добротность контура генератора. Так, при Q»100 и @ 0,02 n>20. Кроме того, для обеспечения Y=900, в качестве реактивных ламп используют пентоды, обладающие малой проницаемостью D (порядка 103), поэтому реакция анода незначительна. Реактивные лампы должны работать без сеточных токов.
, где Q – добротность контура генератора. Так, при Q»100 и @ 0,02 n>20. Кроме того, для обеспечения Y=900, в качестве реактивных ламп используют пентоды, обладающие малой проницаемостью D (порядка 103), поэтому реакция анода незначительна. Реактивные лампы должны работать без сеточных токов.
Меньший уровень ПАМ создают двухтактные схемы реактивных ламп, в которых одна лампа представляет собой емкостное сопротивление, а другая индуктивное, при этом достигается удвоенная девиация частоты: при увеличении реактивного сопротивления одной из ламп реактивное сопротивление другой уменьшается. Если активное сопротивление, вносимое в контур генератора первой лампой увеличивается, то активное сопротивление, вносимое второй уменьшается, при этом результирующее активное сопротивление, вносимое в контур, сохраняется приблизительно постоянным.
Для обеспечения постоянства девиации в диапазоне рабочих частот передатчика используют реактивные лампы с усложненными схемами потенциометра.
Частотные модуляторы на варикапах
В настоящее время в качестве частотных модуляторов используют варикапы полупроводниковые диоды, у которых барьерная емкость Сб запертого p-n-перехода зависит от напряжения, действующего на переходе, и определяется формулой:
Сб = Cб0  , (4.11)
, (4.11)
где j @ 0,5В контактная разность потенциалов: еп – запирающее напряжение на переходе (eп<0); Еп0 произвольное начальное смещение; Сб0 емкость перехода в рабочей точке при еп=Еп0; m@1/3 для плавного перехода, m @ 1/2 для резкого и m@1 для сверхрезкого. Обычно на практике применяют диоды с m@1/2. Значения Еп0 и Сб0 (рабочая точка) определяются перед началом расчета по реальной вольтфарадной характеристике варикапа. В режиме закрытого p-n-перехода барьерная емкость Сб является емкостью варикапа и можно принять, что емкость Сб является управляющей. Достоинствами варикапов являются малые габариты и вес, малая мощность, расходуемой на питание, а также простота схем. Главным их недостатком является недостаточная линейность модуляционной характеристики. Коэффициент гармоник kf клирфактор, характеризующий содержание гармоник, не должен превышать допустимого значения от 0,01 до 0,1 (последняя цифра для портативных радиостанций индивидуального пользования и т.п.). Как известно, клирфактор определяется формулой:
kf= ,
,
где G1F – амплитуда первой гармоники модулирующей частоты, а GnF – амплитуды n ее гармоник. Появление этих гармоник обусловлено нелинейностью вольтфарадной характеристики варикапа. Если под действием модулирующего напряжения емкость варикапа изменяется с частотой F, то с такой же частотой изменяется и средняя частота f0. Однако, из-за нелинейности вольтфарадной характеристики варикапа в спектре функции Cу(t), а следовательно и f0(t), появляются высшие гармоники частоты F, что и приводит к появлению высших гармоник этой частоты на выходе частотного детектора.
Варикап подключают к контуру автогенератора по одной из схем, приведенных на рис.4.8 (или по какой-либо иной), и на него подается модулирующее напряжение низкой частоты. Частота колебаний автогенератора w близка к собственной частоте его колебательного контура wк, которая зависит от управляющего напряжения еу на p-n-переходе варикапа, т.е. w@wк(еу). При безынерционной связи частоты w от еу функция w(еу) – алгебраическая, она носит название статической модуляционной характеристики (СМХ). При проектировании автогенераторов, управляемых по частоте, кроме расчёта энергетического режима генератора и параметров его колебательного контура, необходимо выбрать тип варикапа, а также схему его подключения к контуру, при этом требуется, чтобы полученная СМХ обеспечивала максимальную девиацию частоты при заданной нелинейности и допустимом уровне паразитной амплитудной модуляции (ПАМ). Управляющее напряжение на p-n-переходе варикапа равно eу= Еу0+DEу, где DEу= UW cоsWt его переменная составляющая, а Еу0 постоянное напряжение на переходе в рабочей точке. Девиация частоты автогенератора Dw=wк(еу)wо(еу0), где wк текущее значение частоты. Тогда Dw=D(еу). Частотный модулятор представляет собой ёмкость Су=Суо+DСу(DEу), где Суо барьерная ёмкость при eу= Еу0. Величину Суо учитывают при расчёте частоты wо=wк(Еу0), а отклонение ёмкости DСу определяет девиацию Dw . Относительное значение девиации yf определяется формулой:
yf =![]()
![]() , (4.12)
, (4.12)
где
ωк= ![]() =
= ![]()
 =
=  ,
,![]()
![]() , (4.13),
, (4.13),
Lк – контурная индуктивность
a) 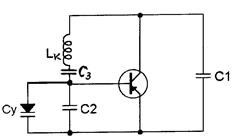 б)
б)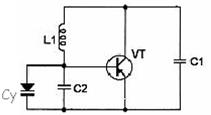
Рис.4.8
В результате несложных преобразований схему колебательного контура автогенератора рис.4.8а можно представить эквивалентной схемой рис.4.9в (этой схемой может быть представлена практически любая схема автогенератора с варикапом, в том числе и схема Клаппа (рис.4.8б). Здесь емкость варикапа (управителя) равна Су=Су0+∆Су, где Су0 емкость варикапа в рабочей точке, т.е. при напряжении на переходе равном Еу0. Полная емкость контура при напряжении на переходе равном Еу0 равна:
Ск0 =![]() =
= ![]() .
.
Здесь
С20=С2 + Су0,
а) б) в)
Рис. 4.9
Емкость контура при напряжении на переходе Еу =Е у0+∆Еу равна
Ск1= ![]() ,
,
где
С21= С2+ Су0+ ∆Су .
В (4.13) ω0 резонансная частота контура при Еу= Еу0, а ωк – при
Еу= Еу0+∆Еу.
![]() , (4.14)
, (4.14)
где согласно (4.13):
 … (4.15)
… (4.15)
Вводя обозначения:
р0= ![]()
![]()
и (4.16)
р1 = ![]() ,
,
где р0 представляют собой коэффициент подключения варикапа к управляемой емкости С2, а р1 –коэффициент включения управляемой емкости С2 в колебательный контур автогенератора получим, что в (4.15):
![]() =
=![]() =
=![]() =
= ![]() 1 (4.17)
1 (4.17)
Тогда согласно (4.14):
yf = ![]()
 , (4.18)
, (4.18)
а отклонение частоты равно:
∆f= yff0 = f0. (4.19)
Формула (4.19) представляет собой зависимость отклонения частоты ∆f от модулирующего напряжения, т.е. СМХ, поскольку величина р1определяется зависимостью Супр, от управляющего напряжения Еупр, т.е. вольтфарадной характеристикой варикапа.
При изменении рабочей точки, т.е. при изменении значений Еу0 и Су0, емкость контура С1 необходимо изменить для сохранения величины поляной емкости контура Ск0 и, соответственно, частоты автоколебаний f0.
При проектировании управляемых по частоте автогенераторов необходимо найти максимальное отклонение частоты, которое можно получить при заданном варикапе и заданной амплитуде напряжения на контуре автогенератора Uк, так как кроме управляющего напряжения низкой частоты к варикапу приложено также переменное напряжение высокой частоты, величина которого зависит от схемы подключения варикапа к контуру автогенератора. Таким образом, напряжение на р-n-переходе uп представляет собой сумму постоянного напряжения E0 напряжения на переходе в рабочей точке (Eу0<0), модулирующего напряжения с частотой W и амплитудой UW и высокочастотного напряжения с частотой w и амплитудой U (рис.4.10):
uп= Eу0 + UW cоsWt + Ucoswt (4.20)
Пределы изменения напряжения uп на переходе ограничены. Чтобы частотная модуляция не сопровождалась недопустимым уровнем ПАМ, мгновенное значение uп не должно быть отпирающим, т.е. оно должно быть всегда отрицательным. При uп > 0 диод отпирается, при этом его емкость в основном определяется диффузионной емкостью, которую шунтирует малое сопротивление проводящего перехода. С другой стороны, напряжение uп по абсолютной величине не должно превышать пробивного напряжения eпд, в противном случае произойдет лавинное нарастание тока через диод. Эти условия удовлетворяются при выполнении неравенств:
E0 + UW + Uw £ 0 | E0 UW Uw | £ епд ![]() (4.21) Если рабочая точка Е0 выбрана в центре рабочего участка характеристики варикапа, то пределы изменения управляющего напряжения симметричны относительно Е0 и согласно (4.21): UWmax = 0,5|e пд| Umax
(4.21) Если рабочая точка Е0 выбрана в центре рабочего участка характеристики варикапа, то пределы изменения управляющего напряжения симметричны относительно Е0 и согласно (4.21): UWmax = 0,5|e пд| Umax
Наибольшая величина Dw может быть достигнута при оптимальном значении коэффициента включения варикапа в контур при DСу=0.
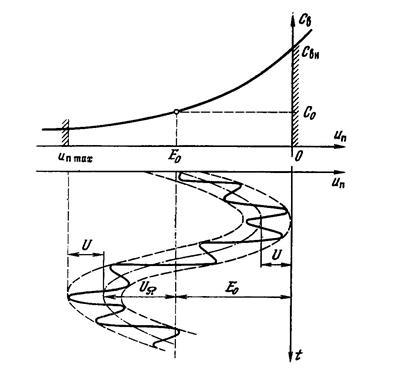
Рис.4.10
Существование этого оптимума можно ожидать исходя из следующих соображений. Амплитуда высокочастотного напряжения U на варикапе пропорциональна коэффициенту его включения в контур, р2, и амплитуде напряжения на контуре автогенератора Uк (на контурной катушке индуктивности Lк (рис.4.8 и 4.9в)):
U=p2Uк . (4.22)
При малых значениях р2 и ограниченных пределах изменении емкости DСу отклонение частоты Dw от значения w0 будет мало. Согласно (4.22) стремление увеличить Dw за счет увеличения р2 приводит к росту высокочастотного напряжения U на рn переходе. из-за ограничения (4.21) увеличение амплитуды U приводит к уменьшению допустимых изменений амплитуды низкочастотного напряжения UW на переходе (рис.4.10), а значит и к уменьшению допустимых значений DС. Расчеты максимальной девиации частоты подтверждают существование оптимального значения коэффициента р2. Величина р2опт может быть рассчитана по одной из двух формул [2]:
р2опт = ![]() при | eпд | £ 3Uк (4.23)
при | eпд | £ 3Uк (4.23)
1 при |eпд| ³ 3Uк ![]()
![]()
Максимально возможная девиация частоты зависит от значений двух отношений: Су0/Ск0 и епд/Uк. Желательно, чтобы величина (Су0 /Ск0) ®1. Что касается отношения епд /Uк, то его величина зависит от характеристик варикапа и транзистора. В маломощном автогенераторе, когда значения Uк и Uпmax максимальное напряжение на переходе соизмеримы, девиация частоты больше.
При расчете автогенератора обычно задаются величиной полной емкости контура Ск0(пФ), которую принимают равной (14)l(м), где λ длина волны. Значение емкости С1 (в схемах рис.4.8) определяется коэффициентом включения колебательного контура автогенератора в выходную цепь транзистора, р:
Здесь UН амплитуда напряжения первой гармоники на нагрузке транзистора, т.е. между коллектором и эмиттером; Uк амплитуда напряжения первой гармоники на колебательном контуре автогенераторе, т.е. на контурной катушке индуктивности Lк; RЭ =Qr эквивалентное сопротивление колебательного контура автогенератора, Q его добротность, а r = w0L=![]() его характеристическое сопротивление на резонансной частоте. Режим автогенератора должен быть таким, чтобы амплитуда переменного напряжения на варикапе была мала, так как при этом увеличивается допустимая амплитуда управляющего напряжения низкой частоты.
его характеристическое сопротивление на резонансной частоте. Режим автогенератора должен быть таким, чтобы амплитуда переменного напряжения на варикапе была мала, так как при этом увеличивается допустимая амплитуда управляющего напряжения низкой частоты.
Недостатком автогенераторов, управляемых одним варикапом, является зависимость частоты автоколебаний от амплитуды высокочастотных колебаний на варикапе, обусловленная тем, что амплитуда первой гармоники тока через варикап является нелинейной функцией амплитуды U высокочастотного напряжения [3]. Барьерная емкость варикапа Сб при U > 0 оказывается несколько большей чем при U®0. При расчете СМХ этим можно пренебречь, однако зависимость емкости варикапа от амплитуды высокочастотного напряжения на переходе увеличивает нестабильность средней частоты автогенератора. Увеличение средней емкости варикапа с ростом амплитуды высокочастотного напряжения можно объяснить тем, что приращение этой емкости, вызванное «отпирающей» полуволной u(t) = Ucoswt, преобладает над ее уменьшением, вызванным «запирающей» полуволной (рис.4.10). Расчеты показывают, что при U << (φ E0) проводимость варикапа с резким pnпереходом определяется емкостью Сб (4.11).
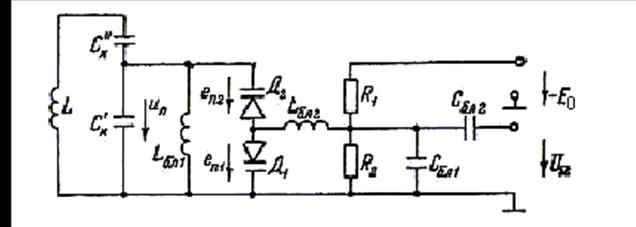
Рис.4.11
При амплитуде U близкой E0 проводимость варикапа возрастает, что эквивалентно увеличению общей емкости контура автогенератора, что приводит к понижению частоты автоколебаний, которая, таким образом, зависит от амплитуды U. Для ослабления этого влияния используют схему частотного модулятора на двух варикапах, включенных последовательно навстречу друг другу (рис.4.11). По низкочастотному управляющему напряжению варикапы включены параллельно, поэтому зависимости емкостей обоих варикапов от Е0 будут одинаковыми, они определяются (4.11) при еп=Е0. Переменная высокочастотная составляющая напряжения действует на варикапы поразному. Увеличение переменного напряжения на контуре вызывает увеличение заряда, накопленного в Д1, и уменьшение заряда в Д2. Соответственно меняются и емкости диодов. Количественно эти изменения таковы, что по отношению к переменному напряжению встречно включенные диоды с резким переходом ведут себя как постоянная емкость.
Частотная модуляция кварцевого генератора
Прямой метод частотной модуляции автогенератора на кварце осуществим лишь при небольшой девиации частоты: ![]() » (1,5 ¸2 )104. Его основное преимущество высокая стабильность средней частоты сигнала. В качестве частотного модулятора здесь также используют варикапы. Большей частью используют схемы автогенераторов с кварцем, работающем при частоте последовательного резонанса. Простейшая схема такого генератора, построенного по схеме Клаппа, изображена на рис.4.12а, а колебательная система автогенератора с включенными в нее емкостью варикапа и эквивалентной схемой кварцевого резонатора на рис.4.12б. На этой схеме приняты следующие обозначения: Cкв, Lкв, rкв и С0кв эквивалентные параметры кварцевого резонатора; Сп емкость варикапа, управляемого напряжением; L1, С1 и С3 индуктивность и емкости колебательной системы генератора, включающие в себя емкости рnпереходов транзистора.
» (1,5 ¸2 )104. Его основное преимущество высокая стабильность средней частоты сигнала. В качестве частотного модулятора здесь также используют варикапы. Большей частью используют схемы автогенераторов с кварцем, работающем при частоте последовательного резонанса. Простейшая схема такого генератора, построенного по схеме Клаппа, изображена на рис.4.12а, а колебательная система автогенератора с включенными в нее емкостью варикапа и эквивалентной схемой кварцевого резонатора на рис.4.12б. На этой схеме приняты следующие обозначения: Cкв, Lкв, rкв и С0кв эквивалентные параметры кварцевого резонатора; Сп емкость варикапа, управляемого напряжением; L1, С1 и С3 индуктивность и емкости колебательной системы генератора, включающие в себя емкости рnпереходов транзистора.
Рис.4.12
При частоте автоколебаний wг, близкой к частоте последовательного резонанса кварца, емкостью С0кв можно пренебречь, тогда согласно рис.4.12б частота автоколебаний равна:
wг=w1кв ,
,
где С13 = ![]() суммарная емкость колебательного контура (без кварца),
суммарная емкость колебательного контура (без кварца),
w1кв=![]() частота последовательного резонанса кварцевого резонатора; Lэ = L1(1
частота последовательного резонанса кварцевого резонатора; Lэ = L1(1 ![]()
![]() эквивалентная индуктивность цепи, составленной из последовательно включенных индуктивности L1 и емкости варикапа Сп. Частота автоколебаний равна:
эквивалентная индуктивность цепи, составленной из последовательно включенных индуктивности L1 и емкости варикапа Сп. Частота автоколебаний равна:
wг =wг0+ Dw ,
где wг0 частота автоколебаний при отсутствии модулирующего сигнала:
wг0 =w1кв (1+![]() ,
,
wг частота автоколебаний под действием поданного на варикап модулирующего напряжения низкой частоты. Отклонение частоты Dw рассчитывают на основании изложенных выше соображений, полученных при анализе частотной модуляции автогенератора с параметрической стабилизацией.
4.2.3. Особенности построения высокочастотного тракта передатчиков с частотной модуляцией
Построение высокочастотного тракта передатчиков с амплитудной и с частотной (как и с фазовой) модуляциями отличаются весьма существенно. Частотная модуляция осуществляется всегда на малом уровне мощности, а высокочастотный тракт, помимо каскадов усиления, всегда содержит умножители частоты. Здесь умножение частоты необходимо по следующим причинам. Вопервых, как было показано выше, ЧМпередатчики работают в диапазоне УКВ, поэтому умножители используют для увеличения частоты fг колебаний, создаваемых задающим генератором, до требуемой величины f0раб; вовторых, при умножении частоты происходит и умножение девиации Df; и, наконец, при наличии на входе умножителя паразитной амплитудной модуляции (ПАМ) ЧМсигнала умножитель, при соответствующем выборе его режима, в значительной степени ее подавляет. Угол отсечки умножителя должен быть немного больше оптимального qopt (cм.1.9.1): q > qopt. Напряжение смещения Еg на сетке лампы умножителя всегда постоянно и поскольку q < 900, то ÷ Eg÷ >÷![]() ÷ (рис.4.13). Амплитуда nой гармоники анодного тока равна Ian= aniamax, где an коэффициент разложения n ой гармоники анодного тока, iamax максимальное значение импульса анодного тока. Если амплитуда напряжения возбуждения Ugm из-за ПАМ возрастает, то при этом возрастают и iamax, и угол отсечки q; последнее, согласно рис.1.3, приводит к уменьшению коэффициента an, и амплитуда n –ой гармоники анодного тока Ian= aniamax меняется мало (или вообще не меняется). При уменьшении Ugm и iamax, и угол отсечки q уменьшаются, но в этом случае, как видно из рис.1.3, коэффициент an увеличивается, и в результате изменение амплитуды nой гармоники анодного тока Ian= aniamax невелико. Требуемая величина угла отсечки q умножителя подбирается в процессе регулировки передатчика.
÷ (рис.4.13). Амплитуда nой гармоники анодного тока равна Ian= aniamax, где an коэффициент разложения n ой гармоники анодного тока, iamax максимальное значение импульса анодного тока. Если амплитуда напряжения возбуждения Ugm из-за ПАМ возрастает, то при этом возрастают и iamax, и угол отсечки q; последнее, согласно рис.1.3, приводит к уменьшению коэффициента an, и амплитуда n –ой гармоники анодного тока Ian= aniamax меняется мало (или вообще не меняется). При уменьшении Ugm и iamax, и угол отсечки q уменьшаются, но в этом случае, как видно из рис.1.3, коэффициент an увеличивается, и в результате изменение амплитуды nой гармоники анодного тока Ian= aniamax невелико. Требуемая величина угла отсечки q умножителя подбирается в процессе регулировки передатчика.
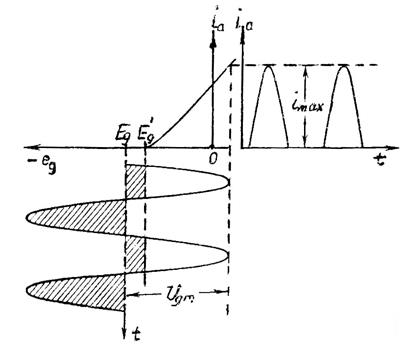
Рис.4.13
Каскады, следующие после умножителей частоты, являются усилителями радиосигнала, они подобны аналогичным каскадам высокочастотного тракта передатчиков с амплитудной модуляцией того же диапазона частот. Различия состоят в том, что, вопервых, режимы ламп высокочастотного тракта при модуляции не изменяются (если нет ПАМ) и, вовторых, колебательные системы усилительных каскадов высокочастотного тракта передатчиков с частотной модуляцией должны пропускать без искажений намного более широкую полосу частот, чем при амплитудной модуляции.