6.2. Конструкция и принцип действия двигателя постоянного тока
6.3. Режимы работы и основные уравнения ДПТ
6.4. Характеристики ДПТ с независимым возбуждением
6.6. Механические характеристики ДПТ с последовательным и смешанным возбуждением
6.1. Классификация основные характеристики исполнительных элементов автоматики автоматизированных систем управления
Эффективность системы автоматического управления (САУ) в значительной мере определяется правильностью выбора исполнительного элемента. Исполнительный элемент (ИЭ), исполнительный механизм (ИМ) - устройство, обеспечивающее непосредственную реализацию алгоритма управления с помощью физического воздействия на объект управления, например изменение положения потенциометра, механическое воздействие на клапан и т.д.
Он представляет собой элемент САУ, соединенный с объектом управления (ОУ) через регулирующий орган (РО). Основная задача ИЭ состоит в том, чтобы усилить сигнал, поступающий на его вход, от регулятора, до уровня достаточного для перемещения РО. РО, в свою очередь, изменяет поток вещества или энергии, поступающий в ОУ, осуществляя требуемое воздействие на объект.
Основными элементами ИМ являются привод (двигатель) и передаточный механизм (редуктор). В некоторых случаях РО является неотъемлемой частью ИЭ и рассматривается с ним как единое целое.
Многообразие ОУ и САУ приводит к тому, что в них используются разные ИМ. Так, к ИЭ, в ряде случаев, можно отнести электромагнитные реле, магнитные пускатели, контакторы, электромагнитные муфты, электродвигатели постоянного и переменного тока. В других случаях к ИЭ относят нагревательные, вентиляционные и другие устройства, с помощью которых осуществляется управление параметрами ОУ.
Исполнительные элементы по виду используемой энергии входит в одну из ветвей ГСП и делятся на группы: электрические, пневматические и гидравлические. Основные характеристики ИЭ:
- быстродействие, инерционность, зона нечувствительности;
- номинальные и максимальные значения мощности или производительности, вращающего момента на выходном валу или усилия на выходном штоке;
- точность отработки команды,
- энергопотребление и кпд,
- весогабаритные показатели на 1 единицу мощности,
- надежность.
Так же как и у других элементов автоматики, и каждого типа ИЭ есть статические и динамические характеристики. Для их получения используют следующую модель ИЭ - это многополюсник, у которого выделяют три группы параметров: входные, выходные и возмущения. Рис. 60.
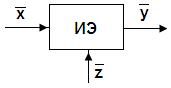
Рис. 60. Модель исполнительного элемента: X - входные параметры, Y - выходные, Z - возмущения
Выходной параметр Y есть функция, как входного параметра X, так и возмущения Z.
Y = F(X, Z).
При различных, но фиксированных (постоянных) значениях возмущения получаем семейство регулировочных статических характеристик.
Y = F1(X, Z=const).
При различных, но фиксированных (постоянных) значениях входного воздействия получаем семейство внешних (механических) статических характеристик.
Y = F2(Z, X =const).
Аналогично, получаем две передаточных функции: по задающему воздействию и по возмущению.
Wx(p)=Y(P)/X(p), Wz(p)=Y(P)/Z(p).
6.2. Конструкция и принцип действия двигателя постоянного тока
В качестве исполнительных элементов во многих устройствах автоматики: в радиоэлектронных, оптических, механических, а также и портативных аппаратах, снабжённых автономными источниками электрической энергии, широко используются электродвигатели постоянного тока. Эти двигатели имеет ряд преимуществ перед другими видами ИЭ: линейность механических характеристик (ДПТ), хорошие регулировочные свойства, большой пусковой момент, высокое быстродействие, большой диапазон по мощность различных типов ДПТ и хорошие весогабаритные показатели.
Основным недостатком этих двигателей является наличие щеточно-коллекторного устройства, ограничивающего срок службы ДПТ и удорожающего обслуживания ДТП, вносящего дополнительные потери, являющегося источником помех и практически исключающего возможность использования ДПТ в условиях агрессивных и взрывоопасных сред.
6.2.1. Конструкция ДПТ
Конструктивно ДПТ состоит из статора (неподвижной части) и ротора или якоря (вращающейся части), помещённого внутри статора. Упрощённо конструкцию машины можно пояснить с помощью рис.61.
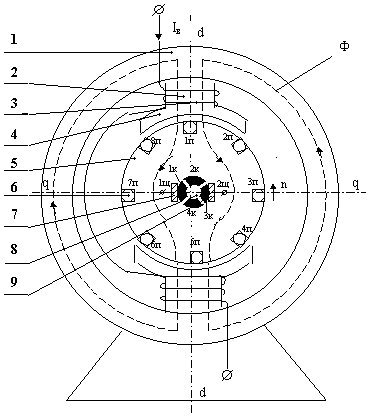
Рис. 61. Конструкция ДПТ
Статор состоит из стальной станины 1, на внутренней поверхности которой расположены главные полюса, состоящие из сердечников 2 и катушек возбуждения 3. В нижней части сердечника полюса имеется полюсный наконечник 4, который обеспечивает нужное распределение магнитной индукции в воздушном зазоре машины. К станине с торцевых сторон прикреплены подшипниковые щиты ( на рис. 61 не показаны ), к одному из которых прикреплены щёткодержатели с металлографитовыми щётками 9.
Ротор ( якорь ) ДПТ состоит из сердечника 5, обмотки якоря 6, коллектора 7 и вала 8.
Сердечник 5 представляет собой цилиндр, набранный из штампованных листов электротехнической стали, с отверстием под вал двигателя и с пазами, в которых укладываются проводники обмотки якоря.
Коллектор 7 – цилиндр, набранный из медных пластин трапециевидного сечения, изолированных электрически друг от друга и от вала двигателя.
Обмотка якоря машины представляет собой замкнутую систему проводников, уложенных и укреплённых в пазах сердечника 5. Она состоит из секций (катушек), выводы которых соединены с двумя коллекторными пластинами. У микромашин обычного исполнения с одной парой полюсов на статоре обмотка якоря представляет собой простую петлевую обмотку (схема рис.62), при построении которой выводы секций обмоток присоединяются к двум соседним коллекторным пластинам, а число секций обмотки и число коллекторных пластин коллектора одинаково.
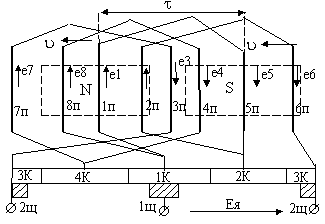
Рис. 62. Схема обмотки якоря ДПТ
Обмотка, схема которой приведена на рис. 62, содержит 4 секции, каждая из которых состоит из активных сторон 1, располагающихся в пазах сердечника и лобовых частей 2, посредством которых активные стороны секций соединяются между собой и с коллекторными пластинами. Чтобы ЭДС, наводимые в активных сторонах секций складывались, необходимо расположить активные стороны одной секции в пазах сердечника, отстоящих друг от друга на расстоянии полюсного деления t. Ротор, приведенный на рис. 6.1, имеет 8 активных проводников, причем секции образуют проводники 1 – 5, 2 – 6, 3 – 7 и 4 – 8.
6.2.2. Электромагнитный момент ДПТ
Принцип действия ДПТ основан на взаимодействии тока проводников обмотки якоря с магнитным полем возбуждения, в результате чего на каждый проводник обмотки якоря действует электромеханическая сила, а совокупность сил, действующих на все активные проводники обмотки, образует электромагнитный момент машины. Пусть у нас есть рамка с током, помещенная в поле постоянного магнита. Рис. 63.
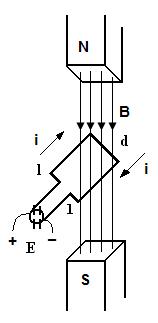
Рис. 63. Принцип действия ДПТ
На каждый проводник с током, помещенный в магнитное поле машины действует электромагнитная сила:
![]() ,
,
где l- длина активного проводника, B - индукция в данной точке воздушного зазора, i – ток в проводнике. Пусть каждая сторона рамки содержит число параллельных ветвей обмотки 2а. Тогда ,если через щетки машины протекает ток Iя , называемый током якоря, то через каждый проводник обмотки якоря протекает ток:
![]() .
.
Совокупность сил действующих на все N проводников рамки приводит к возникновению результирующего электромагнитного момента машины:
![]() .
.
Пусть, у рассматриваемого ДПТ имеется 2р полюсов (в большинстве случаев в микромашинах 2р = 2, т. е. число пар полюсов р = 1). Расстояние по окружности якоря между серединами смежных полюсов называется полюсным делением t . Очевидно, что
 , где d – диаметр рамки.
, где d – диаметр рамки.
Т.к. произведение l*r есть площадь, которую пронизывает полезный магнитный поток полюса Ф, то величина этого потока может быть определена как Ф=Вср*l*r.
После подстановки получим:
![]() или
или ![]() ,
,
где ![]() это - электромагнитная конструктивная постоянная машины.
это - электромагнитная конструктивная постоянная машины.
Таким образом, электромагнитный момент, развиваемый ДПТ пропорционален магнитному потоку Ф и току якоря машины Iя. При вращении ротора (якоря) должно выполняться условие равенства моментов:
М=Мн+Мп+Мд,
где Мн – момент полезной нагрузки, Мп – момент потерь и
![]() - динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
- динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
6.2.3. Электродвижущая сила ДПТ
При вращении ротора ДПТ в каждом активном проводнике обмотки якоря, пересекающем нормальные к его поверхности силовые линии магнитного поля полюсов наводятся ЭДС. Направление ЭДС определяется по правилу правой руки; величина ЭДС определяется выражением
e=Blv,
где l длина активного проводника, B - индукция в данной точке воздушного зазора, v - линейная скорость перемещения проводника относительно линий нормальной к поверхности ротора индукции. При этом при вращении ротора ЭДС в каждом проводнике является периодической переменной во времени величиной.
ЭДС якоря машины равна алгебраической сумме ЭДС проводников, образующих одну параллельную ветвь машины. Каждая параллельная ветвь представляет собой группу последовательно соединённых секций, ток в которых имеет одинаковое направление. Для простой петлевой обмотки число параллельных ветвей 2а всегда равно числу полюсов 2р.
Таким образом, для двухполюсной машины обмотка якоря по отношению к щёткам имеет две параллельных ветви, ЭДС в проводниках которых направлены согласно. Несмотря на то, что при вращении ротора всё новые и новые проводники будут образовывать параллельные ветви, направление ЭДС в проводниках, а также направление суммарной ЭДС параллельной ветви или ЭДС якоря Ея остаётся неизменной при неизменном направлении вращения ротора.
Поскольку число активных проводников параллельной ветви весьма велико, то, несмотря на пульсирующий характер ЭДС каждого из проводников суммарная ЭДС (E) остается практически постоянной при постоянной скорости вращения ротора. В таком случае можно воспользоваться значением средней индукции в воздушном зазоре машины Вср и найти ЭДС.
 , также
, также ![]() и
и ![]() .
.
Зная, что линейная скорость равна v=w∙R==w∙d/2, где w - угловая частота вращения ротора в рад/с, d - диаметр ротора, получим
![]()
Величина полезного магнитный поток полюса Ф может быть определена как, ![]() ,
,
где - полюсное деление, а l*t - площадь, которую пронизывает этот поток.
Тогда
![]() , где
, где ![]() - электрическая конструктивная постоянная машины.
- электрическая конструктивная постоянная машины.
Для системы СИ обе конструктивные постоянные численно совпадают: См = Се. Таким образом, ЭДС якоря машины пропорциональна величине магнитного потока полюсов и частоте вращения ротора. При постоянном магнитном потоке Ф ЭДС якоря машины пропорциональна частоте вращения ротора, т.е.
![]() ,
,
что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.
6.3. Режимы работы и основные уравнения ДПТ
Любая машина постоянного тока обладает свойством обратимости, т.е. она может работать как в генераторном, так и в двигательном режиме при изменении знака момента нагрузки на ее валу или при изменении напряжения на якоре.
Генераторный режим работы машины – такой режим, при котором ток якоря Iя и ЭДС Ея совпадают по направлению, а электромагнитный момент, развиваемый машиной, противоположен по направлению вращению ротора. Такой режим имеет место, если внешний момент М разгоняет ротор ДПТ до скорости w, а цепь якоря замкнута на сопротивление нагрузки Rн (рис. 64а).
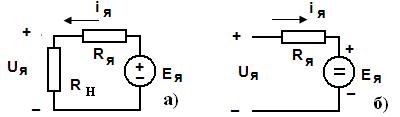
Рис. 64. Схема якорной цепи ДПТ: а) генераторный режим, б) двигательный режим
Определяя по правилу левой руки направление силы, действующей на проводник, найдём, что электромагнитный момент машины в этом случае направлен встречно вращению и, следовательно, встречно внешнему моменту нагрузки Мн .
При работе машины в генераторном режиме ЭДС якоря уравновешивается падением напряжения на нагрузке и падением напряжения от тока якоря на сопротивлении якоря, т. е.
![]() .
.
Уравнение баланса мощностей при работе машины в генераторном режиме имеет вид
![]() ,
,
где Рмех – механическая мощность, потребляемая машиной от источника механической мощности, Рм – потери мощности в обмотке якоря, Рх – потери холостого хода, состоящие из потерь на трение в подшипниках и потерь на перемагничивание материала ротора, Рн – электрическая мощность в нагрузке, Рв – потери в меди обмотки возбуждения.
Двигательный режим работы машины - это такой режим, при котором электромагнитный момент машины М совпадает по направлению со скоростью, а ЭДС якоря Ея направлена встречно току якоря.
Пусть к щёткам двигателя, ротор которого нагружен моментом Мн подведено от внешнего источника напряжение U (рис.64б). Взаимодействие тока якоря Iя с потоком возбуждения приведёт при неподвижном роторе к появлению электромагнитного момента, называемого пусковым с направлением, определяемым по правилу левой руки.
![]() , где
, где  .
.
Если Мп > М, то якорь двигателя придёт во вращение в направлении действия момента Мп. При этом в обмотке якоря появится ЭДС Ея, направленная встречно току в якоре (противоЭДС). При постоянной скорости вращения напряжение на якоре U будет уравновешено ЭДС Ея и падением напряжения от тока якоря на сопротивление якоря Rя,
![]()
При этом Мп = М, и якорь будет вращаться с постоянной скоростью. Уравнение баланса мощности для двигательного режима работы имеет вид:
![]()
где Pэл- электрическая мощность потребляемая от сети, Pмех- полезная механическая мощность на валу двигателя.
6.4. Характеристики ДПТ с независимым возбуждением
В зависимости от способа возбуждения различают ДПТ с независимым (или параллельным) возбуждением, с последовательным возбуждением и со смешанным возбуждением. Разновидностью независимого возбуждения является возбуждение от постоянных магнитов. Характерной особенностью таких двигателей является независимость тока возбуждения (и потока возбуждения) от тока якоря машины.

Рис. 65. ДПТ с независимым возбуждением, а) параллельным, б) от постоянных магнитов
Подставим в основное уравнение ДПТ в двигательном режиме работы выражения для тока якоря и ЭДС.
![]() ,
, ![]() и
и  .
.
В результате получим:
![]() .
.
Разрешив последнее уравнение относительно w, получим уравнение механической характеристики ДПТ с независимым возбуждением. Се = См.
![]() .
.
Так как в этом случае Ф=const, то обозначим к = СФ и получим:
![]() .
.
Здесь wxx скорость идеального холостого хода машины; а Dw - изменение скорости, обусловленное моментом нагрузки двигателя. Сама механическая характеристика ДПТ с независимым возбуждением приведена на рис.66 и представляет собой прямую линию, наклон которой к оси абсцисс зависит от величины потока возбуждения и сопротивления якоря Rя. Чем меньше величина потока возбуждения и чем больше сопротивление Rя, тем круче механическая характеристика.
Порядок построения механическая характеристика ДПТ с независимым возбуждением по паспортным данным двигателя.
Вычисляем значение k из соотношений ![]() ,
, ![]() и получим:
и получим: 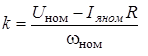
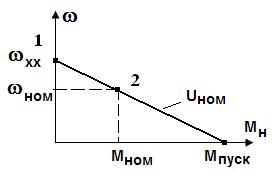
Рис. 66. Механическая характеристика ДПТ с независимым возбуждением
Вычислим wxx скорость холостого хода (точка 1). ![]() .
.
Определим положение рабочей точки 2: для этого возьмем паспортное значение wном и вычислим значение момента: 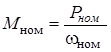 .
.
Проведем прямую линию через две точки; она пересечет ось моментов в точке пускового момента. М=Мп.
Как следует из уравнения механической характеристики, скорость двигателя при постоянном моменте нагрузки можно регулировать тремя способами:
- Изменением напряжения на якоре двигателя,
- Изменением сопротивления в цепи якоря двигателя,
- Изменением потока возбуждения машины.
При регулировании скорости первым способом, напряжение на якоре изменяется либо с помощью реостата, либо с помощью усилительно – преобразовательного устройства, при этом поток возбуждения остаётся постоянным. Семейство механических и регулировочных характеристик, соответствующих данному способу регулирования, приведено на рис.67.
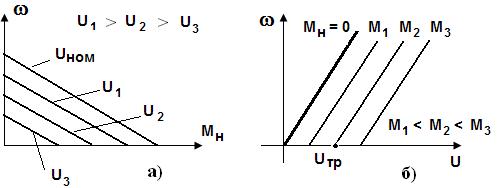
Рис. 67. Семейство механических (а) и регулировочных (б) характеристик ДПТ с независимым возбуждением
С изменением напряжения U пропорционально изменяется и скорость холостого хода при этом угол наклона (или жестокость) механических характеристик остаётся неизменной. Регулировочные характеристики линейны при напряжении на якоре U > Uтр; у них есть имеет зона нечувствительности при напряжении на якоре U < U тр, где U тр – напряжение трогания двигателя. Двигатель не будет вращаться до тех пор, пока М<Мн, а для создания такого момента необходимо иметь при скорости вращения w=0 ток якоря Iтр и соответствующее напряжение Uтр..
![]()
Несмотря на то, что рассмотренный способ регулирования требует довольно сложного оборудования, его широко применяют в современных электроприводах, т.к. он обеспечивает плавное и экономичное регулирование скорости в широких пределах при сохранении высокой жесткости механических характеристик. Лучшие современные системы при данном способе обеспечивают диапазон до 1:100000.
6.5. Регулирование скорости ДПТ изменением сопротивления в цепи якоря и изменением потока возбуждения
Схема регулирования скорости ДПТ путем изменением величины добавочного сопротивления, включённого последовательно в цепь якоря, и семейство механических характеристик приведено на рис. 68.
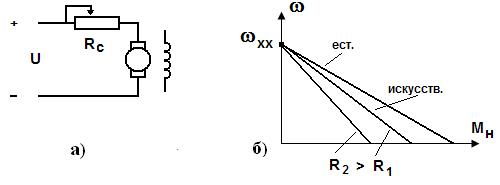
Рис. 68. Регулирование скорости ДПТ изменением сопротивления в цепи якоря
С увеличением добавочного сопротивления якоря Rс увеличивается угол наклона механической характеристики к оси абсцисс, при этом заданному моменту нагрузки соответствуют различные скорости вращения ротора. Скорость холостого хода в данном случае не изменяется. Достоинством такого способа регулирования скорости является простота схемной и аппаратурной реализации, недостатком - большие потери энергии в добавочном сопротивлении, узкий диапазон регулирования скорости при малых моментах нагрузки и малая жесткость механических характеристик при больших сопротивлениях Rc. Регулировочная характеристика нелинейная.
Регулирование скорости вращения изменением потока возбуждения(полюсное управление) можно осуществить по схеме, приведённой на рис. 69.
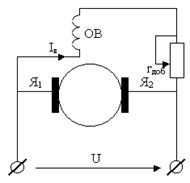
Рис. 69. Регулирование скорости ДПТ изменением сопротивления в цепи якоря
В цепь обмотки возбуждения включается добавочный реостат для регулирования тока возбуждения двигателя, напряжение на якоре остаётся при этом неизменным. В силу того, что Ф = К1*Iв, то при изменении Iв изменяется как скорость холостого хода, так и значение пускового момента Мп.
Следовательно при Ф1> Ф2 получим Мп1> Мп2 и w1<w2/ механические характеристики, соответствующие двум значениям потока возбуждения можно изобразить в виде рис. 70.
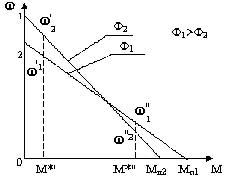
Рис. 70. Механические характеристики при полюсном управлении
Ввиду того, что механические характеристики, соответствующие различным значениям потока возбуждения пересекаются между собой, то при малых моментах нагрузки скорость может возрастать с уменьшением потока, а при больших –падать.
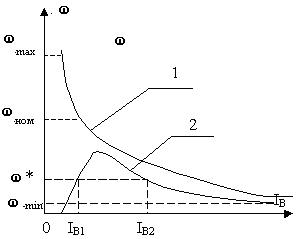
Рис. 71. Регулировочные характеристики при полюсном управлении
Случай идеального холостого хода представлен на кривой 1. Теоретически скорость вращения при Ф = 0 должна была бы возрасти до ∞, но в режиме реального холостого хода имеется определённый механический момент на валу машины М0, при котором скорость холостого хода ограничена величиной nmax. Тем не менее в режиме реального холостого хода скорость двигателя может в несколько раз превысить номинальную скорость, что может привести к механическому разрушению (или разносу) двигателя. Поэтому при таком способе регулирования скорости надо исключить возможность работы двигателя в режиме холостого хода.
Бесконечно большое увеличение тока возбуждения также не приведёт к снижению скорости двигателя до 0 при холостом ходе, т.к. при определённых токах возбуждения имеет место насыщение магнитной цепи машины и увеличение тока возбуждения уже не приводит к увеличению потока Ф. Обычно при таком способе регулирования отношение ωmax/ωmin = 2-5 и регулировочная характеристика имеет вид, представленный кривой 2. Этот способ регулирования скорости применяют, если M>0,5Mп, что исключает возможность разноса двигателя и неоднозначность регулировочной характеристики.
6.6. Механические характеристики ДПТ с последовательным и смешанным возбуждением
В ДПТ с последовательным возбуждением поток возбуждения создаётся током якоря машины, для чего обмотка возбуждения и якорь двигателя включаются последовательно относительно источника питания, как показано на схеме рис. 72.
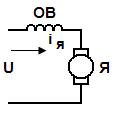
Рис. 72. ДПТ с последовательным возбуждением
Обычно при токах якоря Iя < 0,9 Iном магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения. При больших токах якоря Iя > Iном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным.
Подставив в уравнение
![]()
значение R=Rя+Rв значение M=С*Ф*I и значение Ф=К1*I, получим
 ,
,
причем M=С3*I2. Здесь С1, С2, С3 – постоянные коэффициенты.
Поскольку в установившемся режиме М = Мн, тогда

и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок М < Мн принимает вид (рис. 73.)
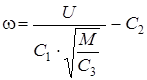 .
.
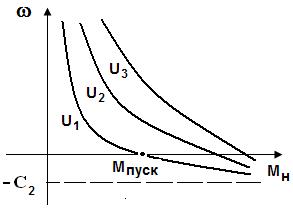
Рис. 73. Механические характеристики ДПТ с последовательным возбуждением
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает этим двигателям хорошие пусковые свойства, т. е. большой пусковой момент при сравнительно малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных и тяговых приводах. Недопустимо, чтобы ДПТ с последовательным возбуждением работал в режиме холостого хода или с нагрузкой, менее 25% от номинальной – это приводит к разносу двигателя. Регулирование скорости вращения в этом случае, производится теми же способами, что и для двигателей с независимым возбуждением.
В ДПТ со смешанным возбуждением магнитный поток Ф создаётся в результате совместного действия двух обмоток возбуждения – параллельной и последовательной (рис.74), поэтому механическая характеристика (кривая 3 на рис. 75) располагается между характеристиками двигателя с независимым возбуждением (кривая 1) и двигателя с последовательным возбуждением (кривая 2).
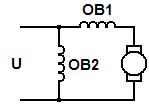
Рис. 74. ДПТ со смешанным возбуждением
В зависимости от соотношения намагничивающих сил параллельной и последовательной обмоток возбуждения можно приблизить кривую 3 либо к кривой 2, либо к кривой 1. Достоинство двигателя со смешанным возбуждением является то, что он обладает мягкой механической характеристикой , но может работать и в режиме холостого хода. Рис. 75.
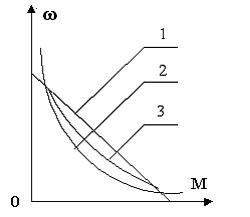
Рис. 75. Механические характеристики ДПТ