15.7.1. Применение эквалайзера Витерби в системе GSM
15.7.2. RAKE-приемник в системах с расширением спектра методом прямой последовательности
15.7.1. Применение эквалайзера Витерби в системе GSM
На рис. 15.23 показан кадр (длительность 4,615 мс) схемы множественного доступа с временным разделением (time-division multiple access — TDMA) в системе GSM, состоящий из 8 слотов, каждый из которых присвоен активному мобильному клиенту. Обычный пакет передачи, занимающий один интервал, состоит из 57 бит сообщения, расположенных по обе стороны от 26-битовой последовательности, иногда называемой зондирующей (sounding) или настроечной (training). Длительность одного слота составляет 0,577 мс (или скорость передачи равна 1733 слота/с). Задача внутренней контрольной последовательности — помочь приемнику в адаптивном определении импульсной характеристики канала (за время передачи одного слота, т.е. 0,577 мс), Чтобы данный метод был эффективным, характеристики замирания в канале должны оставаться неизменными в течение времени, приблизительно равного длительности одного слота. Иначе говоря, за время передачи одного слота, пока приемник анализирует искажение контрольного блока, не должно проявиться быстрое замирание; в противном случае компенсация замирания в канале окажется неэффективной. В качестве примера можно взять приемник GSM, находящийся на скоростном поезде, который движется с постоянной скоростью 200 км/ч (около 55,56 м/с). Частота несущей 900 МГц (длина волны ![]() = 0,33 м). Из уравнения (15.29) время, соответствующее проходу половины длины волны, равно следующему.
= 0,33 м). Из уравнения (15.29) время, соответствующее проходу половины длины волны, равно следующему.

Рис. 15.23. Кадр TDMA GSM и временной слот, содержащий
нормальный пакет
Второй момент разброса задержек ![]() и среднеквадратический разброс задержек
и среднеквадратический разброс задержек ![]() имеют следующий вид:
имеют следующий вид:
 мкс2
мкс2
и, с помощью уравнения (15.17),
![]() = 5,5 мкс
= 5,5 мкс
б) С помощью уравнения (15.21) полоса когерентности канала будет определена следующим образом.
 = 36,4 кГц
= 36,4 кГц
Таким образом, максимально допустимая полоса пропускания сигнала, при которой не нужно использовать эквалайзер, будет W=36,4 кГц.
в) Для полос пропускания различных систем, данных в этом примере, очевидно, что использование эквалайзера в USCD не обязательно, тогда как в GSM он действительно нужен. Относительно систем, которые разрабатывались согласно IS-95, можно сказать следующее: поскольку скорость передачи сигналов или полоса пропускания W, равная 1,25 МГц, значительно превышает полосу когерентности 36,4 кГц, система проявляет частотно-селективное замирание. В то же время в таких системах с расширением спектра методом прямой последовательности (direct-sequence spread spectrum - DS/SS), W умышленно расширяется с целью превышения f0, и, следовательно, подавления эффектов частотно-селективного замирания. Необходимость в эквалайзере возникает только тогда, когда проблему представляет межсимвольная интерференция (intersymbol interference — ISI), но ISI не является проблемой, если скорость передачи символов меньше полосы когерентности (или длительность символа больше многолучевого разброса). Следовательно, в случае IS-95 эквалайзер не нужен, поскольку скорость передачи 9,6![]() 103 символов/с значительно ниже полосы когерентности. Для разнесения путей применяется описываемый в разделе 15.7.2 RAKE - приемник; на уровне элементарных сигналов его реализация сходна с реализацией эквалайзера.
103 символов/с значительно ниже полосы когерентности. Для разнесения путей применяется описываемый в разделе 15.7.2 RAKE - приемник; на уровне элементарных сигналов его реализация сходна с реализацией эквалайзера.
г) Чтобы определить задержку, вносимую устройством чередования, рассчитаем доплеровское расширение и время когерентности с помощью уравнений (15.25) и (15.29).
 =80 Гц, следовательно,
=80 Гц, следовательно,  мс
мс
Исходя из того, что Tп/T0 = 10, рабочий интервал устройства чередования равен Тп = 63 мс. Из этого следует, что общая задержка передатчика и приемника равна 126 мс. Для передачи речи это значение несколько превышает приемлемое. В мобильных системах часто применяются устройства с более короткими рабочими интервалами, которые дают односторонние задержки порядка 20-40 мс.
д) Повторяем расчеты для несущей частоты 1900 МГц. На вычисление полосы когерентности смена несущей не оказывает никакого влияния, а вот доплеровское расширение, время когерентности и задержку чередования нужно рассчитывать заново. Итак,
![]() (15.51)
(15.51)
Как показывает уравнение (15.51), это приблизительно отвечает времени когерентности. Следовательно, время когерентности канала более чем в 5 раз превышает время передачи одного слота (0,577 мс). Время, необходимое для значительного изменения характеристик замирания в канале, относительно велико по сравнению со временем передачи одного слота. Отметим, что выбор, сделанный в системе GSM при подборе времени передачи слота TDMA и контрольного блока, несомненно, был осуществлен при учете необходимости устранения эффектов быстрого замирания, которые могут свести на нет эффективность работы эквалайзера. Скорость передачи символов в стандарте GSM (или скорость передачи битов, если используется двоичная модуляция) равна 271 000 символов/с, а полоса пропускания W составляет 200 кГц. Поскольку среднеквадратический разброс задержек о, в городской местности равен порядка 2 мкс, то, исходя из уравнения (15.21), можно видеть, что результирующая полоса когерентности f0 будет приблизительно равна 100 кГц. Следовательно, очевидно, что поскольку f0 < W, приемник GSM должен иметь средства для борьбы с частотно-селективным искажением. Как правило, для этого используется эквалайзер Витерби.
Рис. 15.24. Применение эквалайзера Витерби в системе GSM
На рис. 15.24 изображена блок-схема приемника GSM для оценки импульсной характеристики канала. Эта оценка нужна детектору для получения опорных сигналов, согласованных с состоянием канала [54], что будет объяснено ниже. Наконец, для оценки битов сообщения с максимальным правдоподобием используется алгоритм Витерби. Принятый сигнал можно описать через переданный сигнал, свернутый с импульсной характеристикой канала. Обозначим через str(t) переданную контрольную последовательность, а через rtr(t) — соответствующую принятую последовательность.
rtr(t)= str(t)*hc(t) (15.52)
В данном случае "*" означает операцию свертки, причем шумом мы пренебрегаем. В приемнике, поскольку rtr(r) является частью принятого нормального пакета, она извлекается и отсылается на фильтр с импульсной характеристикой hmf(t), который согласован с str(t). Этот согласованный фильтр выдает оценку hc(t), обозначаемую как he(t), которая, согласно (15.25), записывается следующим образом.
he(t)= rtr(r)* hmf(t)= str(t)* hc(t)* hmf(t)=Rs(t)hc(t) (15.53)
Здесь Rs(t)= str(t)* hmf(t) - автокорреляционная функция str(t). Если str(t) предназначена для получения очень короткой (импульсного типа) автокорреляционной функции Rs(t), тогда he(t)= hc(t). Далее, при использовании отсекающей функции w(t), he(t) усекается до функции hw(t), которую уже можно обрабатывать численно. Временная длительность w(t), обозначаемая как L0, должна быть достаточно большой для компенсации эффектов типичной ISI, введенной каналом. Член L0 образуется в результате двух вкладов, а именно: LCISI соответствующий управляемой ISI, вызванной гауссовой фильтрацией полосового сигнала (который затем модулирует несущую согласно схеме MSK), и Lc, соответствующий вводимой каналом ISI, которая вызвана многолучевым распространением. Таким образом, L0 можно записать следующим образом.
L0 = LCISI + Lc
В системе GSM требуется обеспечить подавление искажений, вызванных дисперсией сигнала, имеющего разброс задержек порядка 15-20 мкс. Поскольку в GSM длительность бита составляет 3,69 мкс, L0 можно выразить в единицах битовых интервалов. Следовательно, эквалайзер Витерби, применяемый в системе GSM, обладает памятью от 4 до 6 битовых интервалов. На каждом интервале L0 бит задача эквалайзера Витерби состоит в нахождении наиболее правдоподобной последовательности, длиной L0 бит, среди ![]() возможных, которые могли быть переданы. Определение наиболее правдоподобной L0 - битовой последовательности, которая могла быть передана, требует создания
возможных, которые могли быть переданы. Определение наиболее правдоподобной L0 - битовой последовательности, которая могла быть передана, требует создания ![]() значащих опорных сигналов путем модификации (или искажения)
значащих опорных сигналов путем модификации (или искажения) ![]() идеальных сигналов (генерируемых приемником) таким образом, как канал искажает передаваемый слот. Следовательно,
идеальных сигналов (генерируемых приемником) таким образом, как канал искажает передаваемый слот. Следовательно, ![]() опорных сигналов сворачиваются с усеченной оценкой импульсной характеристики канала hw(t) с целью генерации искаженных или своего рода подогнанных под канал опорных сигналов. Затем подкорректированные сигналы сравниваются с принятыми информационными сигналами для расчета метрик. Отметим, что перед сравниванием принятые данные сворачиваются с известной усеченной автокорреляционной функцией w(t)Rs(t), преобразовывая ее подобно опорным сигналам. Такой фильтрованный сигнал сообщения сравнивается с
опорных сигналов сворачиваются с усеченной оценкой импульсной характеристики канала hw(t) с целью генерации искаженных или своего рода подогнанных под канал опорных сигналов. Затем подкорректированные сигналы сравниваются с принятыми информационными сигналами для расчета метрик. Отметим, что перед сравниванием принятые данные сворачиваются с известной усеченной автокорреляционной функцией w(t)Rs(t), преобразовывая ее подобно опорным сигналам. Такой фильтрованный сигнал сообщения сравнивается с ![]() возможными подкорректированными опорными сигналами, причем способ получения метрик подобен способу, использованному в алгоритме декодирования Витерби (Viterbi decoding algorithm — VDA). Алгоритм VDA дает максимально правдоподобную оценку переданной последовательности данных [34].
возможными подкорректированными опорными сигналами, причем способ получения метрик подобен способу, использованному в алгоритме декодирования Витерби (Viterbi decoding algorithm — VDA). Алгоритм VDA дает максимально правдоподобную оценку переданной последовательности данных [34].
Отметим, что в большинстве методов выравнивания для компенсации неоптимальных свойств hc(t) применяются фильтры, т.е. выравнивающие фильтры пытаются модифицировать искаженные формы импульсов. В то же время эквалайзер Витерби работает иным образом. Он включает измерение hc(t), а затем предоставляет способ подгонки приемника под среду канала. Целью такой подгонки является попытка помочь детектору в оценке искаженной последовательности импульсов. При наличии эквалайзера Витерби искаженные выборки не меняют формы и не компенсируются прямо каким-либо иным методом; приемник не подавляет сигнал, он перестраивается таким образом, что становится способен к более эффективной обработке искаженных фрагментов.
15.7.2. RAKE-приемник в системах с расширением спектра методом прямой последовательности
Стандарт IS-95 определяет систему сотовой связи DS/SS, в которой для разнесения путей распространения используется RAKE-приемник (RAKE receiver) [35—37]. Данный приемник изучает различные многолучевые задержки на предмет кодовой корреляции, потом соответствующим образом восстанавливает задержанные сигналы, которые затем оптимально сочетаются с выходом других независимых корреляторов. На рис. 15.25 показаны профили мощности сигнала, соответствующие пяти передачам элементарных сигналов кодовой последовательности 1 0 1 1 1, причем моменты наблюдения обозначены как t-4 — для самого раннего наблюдения и t0 — длясамого позднего. На осях абсцисс показаны три компонента, поступающих с задержками ![]()
![]()
![]() . Полагается, что интервалы между моментами передачи ti и интервалы между моментами задержек
. Полагается, что интервалы между моментами передачи ti и интервалы между моментами задержек ![]() равны по длительности одному элементарному сигналу. Отсюда можно сделать вывод, что компонент, поступающий на приемник в момент t-4 сзадержкой
равны по длительности одному элементарному сигналу. Отсюда можно сделать вывод, что компонент, поступающий на приемник в момент t-4 сзадержкой ![]() , совпадает по времени с двумя другими компонентами, а именно: поступающими в моменты t-3 и t-2 с задержками
, совпадает по времени с двумя другими компонентами, а именно: поступающими в моменты t-3 и t-2 с задержками ![]() и
и ![]() соответственно. Поскольку в этом примере задержанные компоненты разделены, по крайней мере, временем одного элементарного сигнала, то их можно разрешить. В приемнике должен быть блок зондирования, предназначенный для оценки времени задержки
соответственно. Поскольку в этом примере задержанные компоненты разделены, по крайней мере, временем одного элементарного сигнала, то их можно разрешить. В приемнике должен быть блок зондирования, предназначенный для оценки времени задержки ![]() . Следует отметить, что для мобильных наземных систем радиосвязи скорость замирания относительно низка (порядка миллисекунд) или, иначе говоря, когерентность канала довольно высока по сравнению с длительностью элементарного сигнала (Т0 > Tch). Таким образом, изменения
. Следует отметить, что для мобильных наземных систем радиосвязи скорость замирания относительно низка (порядка миллисекунд) или, иначе говоря, когерентность канала довольно высока по сравнению с длительностью элементарного сигнала (Т0 > Tch). Таким образом, изменения ![]() проявляются достаточно слабо, чтобы приемник успел подстроиться к ним.
проявляются достаточно слабо, чтобы приемник успел подстроиться к ним.
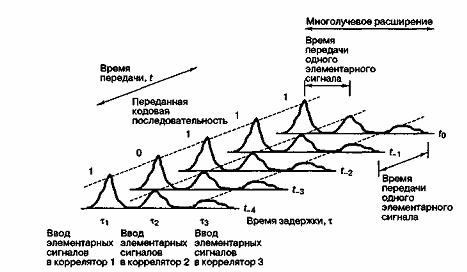
Рис. 15.25. Принимаемые элементарные сигналы в трехкомпонентном RAKE-приемнике
После оценки задержек ![]() для восстановления каждого разрешимого многолучевого компонента используется отдельный коррелятор. В данном примере подразумевается три таких коррелятора, каждый из которых будет обрабатывать запаздывающую версию одной и той же последовательности элементарных сигналов 1 0 1 11. На рис. 15.25 каждый коррелятор принимает элементарные сигналы с профилем мощности, представляющим собой последовательность компонентов, расположенную вдоль диагональной линии. Для простоты все элементарные сигналы показаны как положительные сигнальные посылки. В действительности эти элементарные сигналы образуют шумоподобную последовательность, которая, конечно, содержит и положительные, и отрицательные импульсы. Каждый из корреляторов пытается скоррелировать эти поступающие элементарные сигналы с таким же соответствующим образом синхронизированным псевдослучайным кодом. В конце символьного интервала (как правило, на один символ приходится сотни или даже тысячи элементарных сигналов) выходы корреляторов когерентно объединяются, после чего принимается решение относительно значения принятого символа. На рис. 15.26 показано фазовое вращение компонентов (Fi), выполняемое RAKE-приемником для облегчения когерентного объединения сигналов. На уровне элементарных сигналов RAKE-приемник подобен эквалайзеру, но его действительная функция заключается в разнесении путей распространения.
для восстановления каждого разрешимого многолучевого компонента используется отдельный коррелятор. В данном примере подразумевается три таких коррелятора, каждый из которых будет обрабатывать запаздывающую версию одной и той же последовательности элементарных сигналов 1 0 1 11. На рис. 15.25 каждый коррелятор принимает элементарные сигналы с профилем мощности, представляющим собой последовательность компонентов, расположенную вдоль диагональной линии. Для простоты все элементарные сигналы показаны как положительные сигнальные посылки. В действительности эти элементарные сигналы образуют шумоподобную последовательность, которая, конечно, содержит и положительные, и отрицательные импульсы. Каждый из корреляторов пытается скоррелировать эти поступающие элементарные сигналы с таким же соответствующим образом синхронизированным псевдослучайным кодом. В конце символьного интервала (как правило, на один символ приходится сотни или даже тысячи элементарных сигналов) выходы корреляторов когерентно объединяются, после чего принимается решение относительно значения принятого символа. На рис. 15.26 показано фазовое вращение компонентов (Fi), выполняемое RAKE-приемником для облегчения когерентного объединения сигналов. На уровне элементарных сигналов RAKE-приемник подобен эквалайзеру, но его действительная функция заключается в разнесении путей распространения.
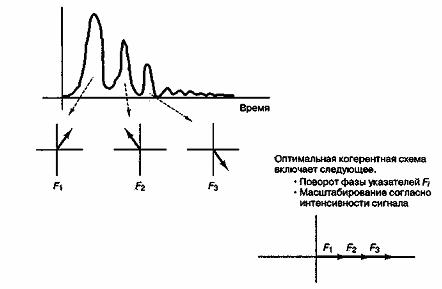
Рис. 15.26. Когерентное объединение многолучевых вкладов в RAKE-приемнике
Способность систем DS/SS к подавлению помех основывается на том, что кодовая последовательность, поступающая на приемник со сдвигом по времени лишь на один элементарный сигнал, будет иметь очень низкую корреляцию с конкретным псевдослучайным кодом, с которым коррелировала исходная последовательность. Следовательно, любые кодовые элементарные сигналы, запаздывающие на один или более элементарных интервалов, будут подавляться коррелятором. Задержанные элементарные сигналы всего лишь вносят вклад в возрастание уровня интерференции (корреляционных боковых лепестков). Подавление, которое осуществляет RAKE-приемник, можно назвать разнесением путей распространения, так как он осуществляет объединение энергии элементарных сигналов, которые поступают по многим путям распространения. Без RAKE-приемника эта энергия была бы потеряна для приемника DS/SS. Если на рис. 15.25 обратить внимание на картину над точкой ![]() , можно сделать вывод, что существует интерференция между элементарными сигналами вследствие одновременного поступления разных компонентов. Эффективность, получаемая в результате расширения спектра, позволяет системе выдерживать такую интерференцию на уровне элементарных сигналов. Считается, что другой коррекции в стандарте IS-95 не нужно.
, можно сделать вывод, что существует интерференция между элементарными сигналами вследствие одновременного поступления разных компонентов. Эффективность, получаемая в результате расширения спектра, позволяет системе выдерживать такую интерференцию на уровне элементарных сигналов. Считается, что другой коррекции в стандарте IS-95 не нужно.