1. Принципы цифрового управления технологическими объектами
1.1. Классификация и состав систем управления
1.2. Способы управления технологическими объектами
1.3. Методы выбора периода квантования
1.4. Типичные алгоритмы непосредственно цифрового управления
2. Средства сопряжения с объектом
2.1. Технологические процессы как объекты управления
2.2. Устройства получения информации
3. Микропроцессорные средства систем управления
3.1. Интерфейсы систем управления
3.2. Организация параллельного интерфейса
3.3. Организация последовательного интерфейса
3.4. БИС задания времени (таймер)
Перечень сокращений
АЛУ – арифметико-логическое устройство
БУ – блок управления
ВАХ - вольт-амперная характеристика
ДТЛ – диодно-транзисторная логика
ЗЯ – запоминающая ячейка
ИМС - интегральная микросхема
КМОП - комплементарные МОП-транзисторы
КУС – комбинационное устройство сдвига
КС - комбинационная схема
ЛЭ – логический элемент
МП - микропроцессор
МОП - металл-окисел-полупроводник (транзистор)
ОЗУ - оперативно запоминающее устройство
ПОС – положительная обратная связь
ПЗУ – постоянно запоминающее устройство
ППЗУ - программное ПЗУ
РПЗУ – репрограммируемое ПЗУ
СЧ – счетчик
ТТЛ - транзисторно-транзисторная логика
УГО – условнографическое обозначение
ЭСЛ - эмитерно-связанная логика
ЯП – ячейка памяти
1. Принципы цифрового управления технологическими объектами
1.1. Классификация и состав систем управления
В общем случае любая система (техническая, биологическая, экономическая, социальная и т.д.) представляет собой множество взаимосвязанных элементов. В автоматике под системой подразумевают совокупность объектов управления и управляющего устройства, которые взаимодействуют между собой. В сфере промышленного производства сегодня практический интерес имеют системы управления трех категорий: локальные, централизованные и автоматизированные системы управления технологическими процессами. К первой категории систем автоматики относятся локальные (местные) средства контроля, регулирования и управления. Эти системы находят широкое применение на хорошо изученных «простых» объектах управления с числом измерительных величин, не превышающих десятка, например, для котельных установок малой мощности, кондиционеров, холодильных агрегатов и других объектов. Они эффективны при автоматизации технологически независимых объектов с компактным расположением основного оборудования и несложными целями управления (стабилизация, слежение, программное и логическое управление, контроль и измерение) при хорошо отработанной технологии и стационарных условиях эксплуатации.
Появление централизованных систем автоматики связано с ростом количества контролируемых параметров, с территориальным размещением объектов управления. Они разрешают реализовать новые функции по вычислению комплексных показателей эффективности работы отдельных агрегатов и технико-экономических показателей всего технологического процесса, вычислению на этой основе оптимальных управляющих действий и реализации этих действий или в виде вставок локальных регуляторов, или в виде непосредственного действия на исполнительное устройство.
Более высокие требования к качеству управления за счет повышения количества контролируемых параметров, осуществления более точного и комплексного контроля сырья и промежуточных продуктов, оптимального управления объектами на основе их математической модели создали предпосылки к использованию систем третьей категории - АСУТП. В этих системах объединяются решения задач контроля и регулирования технологических процессов, выбора оптимальных режимов и алгоритмов управления.
Несмотря на численное разнообразие систем управления, общим для них является наличие элементов: объекта управления, устройства управления, устройства связи с объектом, получение и использование информации (датчики).
Типичная структура системы управления приведена на рис. 1.1. Показанные на ней аппаратные средства, которые составляют систему, можно разделить на следующие основные части:
- устройство управления (УУ);
- устройство связи с объектом (УСО);
- периферийные устройства (датчики (Д));
- исполнительные устройства, органы (ИО).
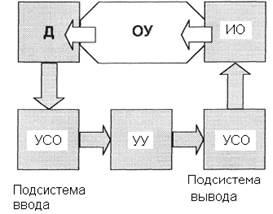
Рисунок 1.1. Структурная схема системы управления
Устройства, которые обеспечивают возможность подключения управляющего устройства к объекту управления (ОУ), выделяют в специальный класс периферийных устройств - устройства связи с объектом (УСО), которые включают в себя подсистемы аналогового и цифрового ввода, подсистемы аналогового и цифрового вывода.
Подсистема аналогового ввода преобразовывает аналоговые физические величины в форму, пригодную для использования в устройстве управления. С помощью соответствующих датчиков аналоговые величины разной физической природы превращаются в большинстве случаев в постоянный ток или напряжение.
Основные функции оборудования подсистемы:
- нормализация и усиление сигнала, фильтрация, ослабление сигнала, смещение уровня, преобразование и др.;
- коммутация сигналов;
- аналого-цифровое преобразование.
Разнообразные требования по стоимости и техническим характеристикам дают возможность вариации структуры подсистемы аналогового ввода на основе выбора метода обработки аналоговых сигналов.
На рис. 1.2 приведена структура, которая реализует принцип параллельной обработки аналоговых сигналов, поступающих от датчиков. Данная структура даёт возможность обеспечить максимальную производительность аппаратуры всех каналов подсистемы вследствие независимости обработки каждого сигнала и высокое качество преобразования сигналов вследствие возможности подсистемы обеспечить нужный уровень сигнала на входе аналого-цифрового преобразователя (АЦП) в каждом канале. Такой вариант построения подсистем имеет большое будущее, но на современном этапе развития микросхемотехники при его реализации имеет место высокая стоимость системы из-за сравнительно высокой стоимости интегральных схем АЦП.
Другие варианты (рис.1.3) построения структуры подсистем аналогового ввода базируются на принципе последовательной обработки аналоговых сигналов, применения мультиплексирования, а также аналоговых схем выборки-хранения для фиксации аналоговых сигналов на входе АЦП.
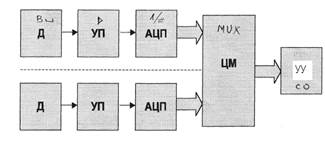
Рисунок 1.2. Структура подсистемы аналогового ввода с параллельными цифровыми вводами сигналов
Это дает возможность использовать только один АЦП независимо от количества аналоговых входов.
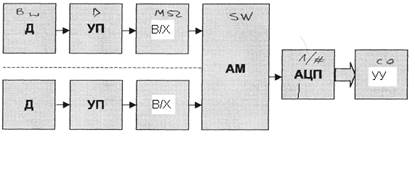
Рисунок 1.3. Структура подсистемы с параллельным аналоговым вводом и последовательным цифровым выводом сигналов
Хорошее качество преобразования обеспечено теми же функциональными блоками, которые входят в состав структуры (рис. 1.2). Производительность данной структуры находится в прямой зависимости от АЦП и ограничена его динамическими параметрами, поэтому в таких подсистемах необходимо использовать АЦП, имеющие высокое быстродействие. Использование дополнительных элементов для обработки аналоговых сигналов мультиплексоров, схем выборки-хранения ухудшает характеристики точности подсистемы в целом. Практически идентичными техническими характеристиками по сравнению со структурой (рис. 1.3), обладает подсистема (рис. 1.4).
Аппаратные затраты для реализации подсистемы на основе структуры (рис. 1.3) более высокие по сравнению с затратами для построения структуры с одной схемой выборки-хранения (рис.1.4). Эту конфигурацию структуры наиболее рационально использовать в однократных событиях.
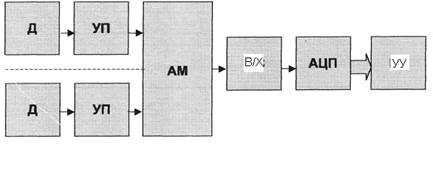
Рисунок 1.4. Структура подсистемы аналогового ввода с последовательным выводом сигналов
Простейшей, но обеспечивающей относительно низкое качество преобразования, является подсистема, построенная по структуре, приведенной на рис. 1.5.
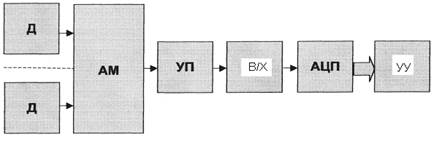
Рисунок 1.5. Рациональная структура подсистем аналогового ввода и аналогового вывода сигналов
Эта конфигурация структуры рациональная при условии существования сигналов высокого уровня, которые поступают с датчиков, и идентичности этих сигналов. В этом случае имеется возможность обеспечения необходимого качества преобразования при сохранении преимущества простоты реализации.
Из анализа возможных вариантов построения структур вытекает, что любой вариант реализуется на основе функциональных устройств: датчиков, устройств согласования, АЦП, цифровых мультиплексоров, аналоговых мультиплексоров, устройств выборки-хранения.
Подсистема аналогового вывода во многом напоминает подсистему аналогового ввода и используется для представления на объект контроля сигналов в виде напряжения или тока, которые изменяются во времени по заданному закону. При преобразовании цифровых данных в аналоговый сигнал с помощью ЦАП выделяют две конфигурации подсистем аналогового вывода:
- с цифро-аналоговым преобразователем в каждом канале;
- с одним ЦАП, который работает в режиме распределения времени.
Первая конфигурация применяется там, где есть потребность в высокой скорости и точности. Вторая конфигурация менее ценная, так как применяется только один ЦАП. В этом случае подсистема должна
вмещать ряд исходных схем аналоговой памяти.
Подсистема цифрового ввода-вывода. Для систем автоматики характерны не только аналоговые входные и выходные величины, но и цифровые. Они могут быть представлены двумя состояниями, например, "включено" или "выключено", "в пределах" или "за пределами", "низкий уровень" или "высокий уровень". Кроме цифровых параметров, которые характеризуют состояние объекта, существуют выходные цифровые параметры, которые задают желательное состояние объекта. Например, при контроле объекта часто возникает необходимость включения или отключение блоков и модулей, которые его составляют.
В этих подсистемах в качестве преобразующих схем входных сигналов используют резистивные делители напряжения, диодные ограничители, компараторы, триггеры Шмидта, согласователи уровней.
Основная функция подсистемы цифрового вывода – функция ключа. Выбор типа ключа определяется значением мощности, которая коммутируется, а также величиной скорости переключения. Электромеханические реле используют в основном для управления средней и большой мощностью при низких скоростях переключения. Они обеспечивают полную гальваническую развязку цепи.
Более надежными элементами являются полупроводниковые ключи (биполярные и полевые транзисторы).
Для коммутации цепей переменного тока средней и большой мощности часто используются кремниевые выпрямители, которыми можно управлять. Практически совершенными переключающими характеристиками обладают полевые транзисторы. Для гальванической развязки полупроводниковых ключей используют оптоэлектронные пары.
1.2. Способы управления технологическими объектами
Любое управление строится на основе информации о состоянии объекта управления и сопоставления информации с целью управления и формирования по результатам этого сопоставления соответствующего управляющего воздействия. Все эти задачи решаются управляющим устройством, в качестве которого в системах управления все чаще используются средства вычислительной техники (СВТ). К ним относятся микропроцессоры, микроконтроллеры и персональные компьютеры.
Использование средств вычислительной техники в управлении технологическими процессами дает возможность:
- компенсировать программным путем недостатки датчиков (нелинейность характеристики, наличие зоны нечувствительности и сдвига нуля);
- вычислять значение выходных управляющих параметров технологического процесса по математической модели при отсутствии необходимых датчиков;
- рассчитывать в автоматическом режиме оптимальную структуру и параметры отладки цифровых регуляторов при изменении динамических параметров объекта управления;
- реализовывать совершенные алгоритмы управления, которые могут перестраиваться программным путем при изменении динамики объекта, технологии производства, ситуации в ходе технологического процесса;
- учитывать при управлении не только текущее состояние объекта, но и его предысторию.
Управление технологическими объектами с использованием СВТ можно осуществлять тремя способами:
- управление в режиме советника;
- супервизорное управление;
- непосредственное цифровое управление.
На рис. 1.6 приведена схема системы управления с использованием СВТ в режиме советника.
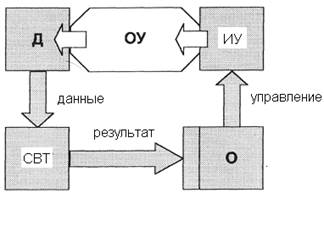
Рисунок 1.6. Режим советника
Информация о состоянии объекта управления снимается с датчиков, обрабатывается и в удобной форме предоставляется оператору (О). Характерная особенность такого режима - формирование влияния на объект управления оператором через исполнительные органы системы.
В режиме супервизорного управления выполняется автоматическая коррекция установок локальных регуляторов с помощью постоянного подключения выводов управляющего устройства через устройство связи с объектом до установок локальных аналоговых регуляторов. В этом случае СВТ работают в замкнутом контуре второго уровня управления и используются для решения задач статической оптимизации технологических объектов управления.
При непосредственном цифровом управлении предполагается выполнение следующих операций:
- определение в СВТ ошибки несогласования между задающим воздействием и полученным значением;
- опрос датчиков в дискретные моменты времени, превращение информации в цифровой код и введение в запоминающее устройство средств вычислительной техники;
- формирование управляющего воздействия с помощью алгоритма управления;
- преобразование цифрового сигнала в аналоговый управляющий и выдача его на исполнительный механизм (орган).
Схема системы управления в режиме непосредственного цифрового управления (НЦУ) представлена на рис. 1.7.
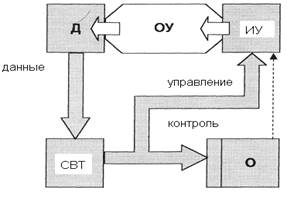
Рисунок 1.7. Режим НЦУ
Информационная связь между системой управления и ОУ осуществляется с помощью датчиков и исполнительных органов. Отличительной особенностью работы СВТ в режиме непосредственного цифрового управления является наличие предельно допустимой задержки между моментами введения информации, обработки и выдачи управляющего воздействия.
При реализации контуров НЦУ применяются синхронный и асинхронный принципы связи управляющих СВТ с объектом. При синхронном обмене процесс управления разбивается тактовыми импульсами на такты, за это время осуществляются снятие данных с ОУ, их обработка и выдача управляющего воздействия. При асинхронном обмене в СВТ поступают импульсы от датчиков прерывания, при этом на некоторое время прерывается выполнение основной программы, запоминается промежуточная информация и выполняется подпрограмма по сигналу прерывания. После этого осуществляется возвращение к прерванной программе.
Таким образом, необходимо решать такие задачи:
- Анализ ОУ и разработка математической модели.
- Определение структуры системы управления.
- Проектирование алгоритма управления.
- Выбор оптимального периода опроса датчиков и выдачи управляющего воздействия.
- Выбор типа СВТ и разработка системы для реализации заданных алгоритмов, включая выполнение требований к устройствам связи с объектом.
- Реализация программного обеспечения.
Структура типичного контура НЦУ, который реализуется на базе СВТ, представлена на рис. 1.8. СВТ выполняют функции задающего, сравнивающего и управляющего устройств.
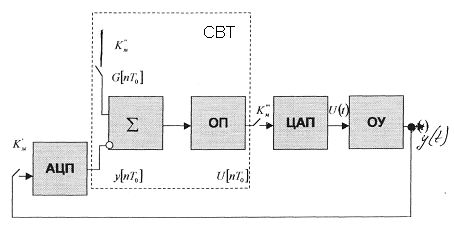
Рисунок 1.8. Структурная схема контура НЦУ
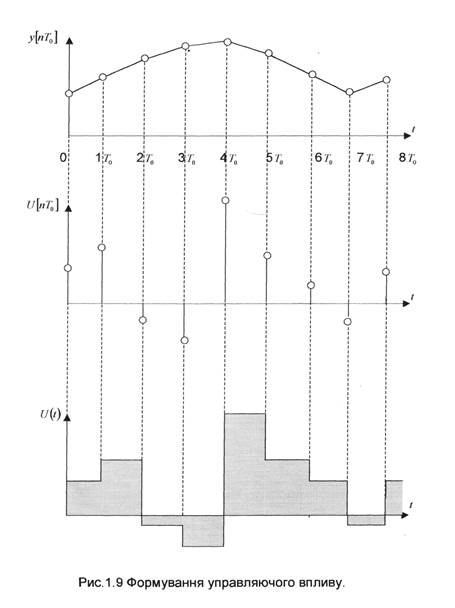
Рисунок 1.9. Формирование управляющего воздействия
Исходная регулируемая величина y(t) в дискретные моменты времени ![]() поступает через коммутатор
поступает через коммутатор ![]() на аналого-цифровой преобразователь. С помощью коммутатора аналоговых сигналов осуществляется квантование непрерывного сигнала с периодом квантования Т0, в результате чего координата y(t) превращается в решетчатую функцию y[nТ0]. На каждом периоде квантования в сравнивающем устройстве определяется ошибка регулирования:
на аналого-цифровой преобразователь. С помощью коммутатора аналоговых сигналов осуществляется квантование непрерывного сигнала с периодом квантования Т0, в результате чего координата y(t) превращается в решетчатую функцию y[nТ0]. На каждом периоде квантования в сравнивающем устройстве определяется ошибка регулирования:
e [n0]=G[n0]-y[n0], (1.1)
где G[n0] - влияние, которое задается цифровым регулятором.
Вычислительное устройство (ВУ) на основании алгоритма НЦУ формирует управляющее воздействие u[n0] в виде цифрового кода, который через коммутатор ![]() в каждый период квантования подключается ко входу цифро-аналогового преобразователя. С помощью ЦАП осуществляется преобразование последовательности значений u[n0] в непрерывный сигнал u(t), который остается постоянным на протяжении следующего периода квантования nT0 до появления следующего члена последовательности u[(n+1)T0] ( рис. 1.9).
в каждый период квантования подключается ко входу цифро-аналогового преобразователя. С помощью ЦАП осуществляется преобразование последовательности значений u[n0] в непрерывный сигнал u(t), который остается постоянным на протяжении следующего периода квантования nT0 до появления следующего члена последовательности u[(n+1)T0] ( рис. 1.9).
СВТ в мультипрограммном режиме обслуживают поочередно каждый контур НЦУ, определяют управляющее воздействие Ui(n0), где i = 1,2,…, Р - номер цифрового регулятора. С помощью регистров цифро-аналоговых преобразователей выполняется запоминание управляющего воздействия в каждом контуре НЦУ за весь период квантования T0i. Вычислительное устройство, с помощью которого реализуется цифровой регулятор, работает в реальном масштабе времени. Коммутатор ![]() выполняет функции импульсного модулятора, прохождение сигнала через который связано с потерей части информации, которая находится в нем, так как в промежутках между импульсами U(n0) характер изменения управляющего воздействия U остается неизвестным.
выполняет функции импульсного модулятора, прохождение сигнала через который связано с потерей части информации, которая находится в нем, так как в промежутках между импульсами U(n0) характер изменения управляющего воздействия U остается неизвестным.
Задача оптимального выбора периода квантования относится к одной из основных проблем оптимального расходования машинного времени, затраченного на каждый контур НЦУ. При уменьшении Т0 увеличиваются точность регулирования и загрузка СВТ, но неэкономно тратится машинное время. При большом Т0 ухудшается качество регулирования системы, поэтому возникает проблема поиска компромиссного решения, которое удовлетворяет необходимым требованиям.
Таким образом, выбор Т0 сводится к нахождению зависимости точности управления от величины периода квантования управляющего воздействия u[n0] и управляющей переменной y[n0].
1.3. Методы выбора периода квантования
В системах НЦУ ввод сигналов от датчиков и выдача управляющих воздействий на объект происходят в дискретные моменты времени, в паузах между которыми объект остается нерегулируемым и осуществляет принудительные движения под влиянием управляющих воздействий U[n0] и возмущений. Выбор Т0 в зависимости от спектра непрерывной функции выполняется на основе теоремы Котельникова, согласно которой функция y(t), не содержащая гармонических составляющих выше частоты ![]() , полностью определяется своими значениями в моменты времени nTo, отстоящими друг от другого на периоды
, полностью определяется своими значениями в моменты времени nTo, отстоящими друг от другого на периоды
 (1.2),
(1.2),
т.е. частота квантования должна быть выбрана согласно
![]() . (1.3)
. (1.3)
В этом случае дискретная функция y[n0] точно отобразит непрерывную y(t) и потерь информации при квантовании не будет. Для оценки периода квантования существует критерий Джури.
Критерий Джури расчёта периода квантования основан на оценке максимальной частоты в спектре исходного сигнала ![]() и определяется по амплитудно-частотной характеристике замкнутого контура НЦУ:
и определяется по амплитудно-частотной характеристике замкнутого контура НЦУ:
 (1.4)
(1.4)
Из формулы (1.4) определяется ![]() о, причем величина погрешности минимальна, если рассогласование выбирается в пределах
о, причем величина погрешности минимальна, если рассогласование выбирается в пределах ![]() . Период квантования T0 определяется согласно (1.2), и принимается ближайшее меньшее значение.
. Период квантования T0 определяется согласно (1.2), и принимается ближайшее меньшее значение.
Рассмотрим пример.
Частотная передаточная функция объекта регулирования имеет вид
где k = 0.7038; Т0 = 30с.
Определить оптимальный период квантования в системе с ПИ-регулятором НЦУ, параметры которого равны:
Кр = 1.22; Тр = 30с.
При этом необходимо обеспечить точность регулирования в постоянном режиме ![]() = 0,03.
= 0,03.
Согласно рассмотренному критерию Джури период квантования определяется таким образом. Определяем частотную передаточную функцию замкнутой системы
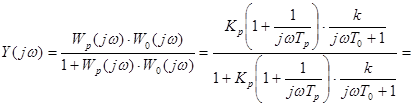
 ,
,
откуда АЧХ определяется как

Решая полученное уравнение, находим частоту ![]() Оптимальный период квантования согласно критерию Джури равен
Оптимальный период квантования согласно критерию Джури равен
 .
.
Принимаем Т0 = 3с.
Согласно критерию обеспечения необходимой точности управления период квантования определяется из соотношения
 (1.5)
(1.5)
где  - характеристика, т.е. для определения периода квантования необходимо иметь информацию о возможных изменениях скоростей входной управляющей координаты объекта.
- характеристика, т.е. для определения периода квантования необходимо иметь информацию о возможных изменениях скоростей входной управляющей координаты объекта.
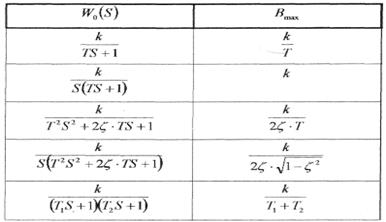
Для типичных звеньев систем автоматического регулирования значения B(![]() ) - характеристики приведены в табл. 1.1.
) - характеристики приведены в табл. 1.1.
Таблица 1.1 – Значения В – характеристики для типичных звеньев систем
Рассмотрим следующий пример.
Определить оптимальный период квантования в системе НЦУ, если объект управления имеет передаточную функцию
в которой k = 1.2; T1 = 30с; T2 = 10c; t = 5c.
Задана абсолютная погрешность исходного сигнала объекта, которая возникает от квантования по времени
![]() = 0.155.
= 0.155.
Согласно табл. 1.1 выбираем передаточную функцию объекта
Так как на величину B -характеристики инерционность объекта не влияет, то максимальное её значение будет
 .
.
Определим 
Принимаем T0 = 5c.
Приведенные критерии выбора периода квантования не могут применяться для объектов управления, которые описываются дифференциальными уравнениями, с производными в правой части, или если в числителе передаточных функций имеется производная процесса. Рассмотрим критерий воспроизведения частотных составляющих в сигнале на выходе объекта, который имеет передаточную функцию
Передаточную функцию объекта путем подстановок ![]() приводят к виду
приводят к виду
Приравнивая значение модуля ![]() к величине 1/
к величине 1/![]() при
при ![]() , получим
, получим
 .
.
Определяем из полученного выражения значение ![]() . Величина
. Величина ![]() характеризует ослабление гармонической составляющей сигнала с частотой
характеризует ослабление гармонической составляющей сигнала с частотой ![]() (на практике
(на практике ![]() = 31). После решения уравнения находим
= 31). После решения уравнения находим
![]()
1.4. Типичные алгоритмы непосредственно цифрового управления (НЦУ)
На базе СВТ можно реализовывать сложные и эффективные законы управления и регулирования. При построении алгоритмов управления технологическими процессами на базе СВТ исходят из принципов действия хорошо исследованных регуляторов: пропорционального (П), интегрального (И), пропорционально-интегрального (ПИ) и пропорционально-интегрально-дифференциального (ПИД).
Закон управления аналогового ПИД-регулятора можно представить уравнением
 (1.6)
(1.6)
где ![]() - управляющее воздействие;
- управляющее воздействие;
e(t) - отклонение регулируемой величины от заданного значения;
Кр - коэффициент усиления;
ТД - постоянная времени дифференцирования;
Ті - постоянная времени интегрирования.
Заменим непрерывные функции e(t) решётчатыми функциями
 . (1.7)
. (1.7)
Для реализации дискретных ПИД-законов управления разработано ряд широко используемых алгоритмов.
Позиционный алгоритм основан на расчете полной величины управляющего воздействия
![]() (1.8)
(1.8)
где ![]() .
.
Рассмотрим алгоритм работы цифрового ПИД-регулятора, проанализировав каждую его составляющую отдельно.
Пропорциональная составляющая ![]() на n-м периоде квантования может рассматриваться автономно в алгоритме позиционного управления
на n-м периоде квантования может рассматриваться автономно в алгоритме позиционного управления
![]() (1.9)
(1.9)
Интегральная составляющая в позиционном алгоритме, исходя из трапецеидального правила для числового интегрирования, имеет вид
![]() (1.10)
(1.10)
Применяя другой способ представления интегральной составляющей, получим
![]() (1.11)
(1.11)
Сигнал на выходе идеального дифференциального звена для позиционного алгоритма в дискретной форме имеет вид
 . (1.12)
. (1.12)
Согласно используемым формулам (1.9-1.12), управляющее воздействие при позиционном алгоритме принимает вид
 . (1.13)
. (1.13)
Вычтем с обеих частей уравнения (1.13.) величину Un-1, в результате чего получим
![]() (1.14)
(1.14)
Это уравнение можно привести к виду
![]()
(1.15)
Введём обозначения:
 , (1.16)
, (1.16)
 , (1.17)
, (1.17)
 . (1.18)
. (1.18)
Основное уравнение позиционного алгоритма регулирования имеет вид
![]() (1.19)
(1.19)
Уравнение приведено к форме, удобной для программирования. Оценка коэффициентов А0, А1, А2 эквивалентна оценке величин kp, Ti, TД при постоянном T0.
На основании полученных выражений для конкретных условий работы рассчитывается полная величина управляющего воздействия на заданном T0, она передается на ЦАП и на исполнительное устройство.
Скоростной алгоритм отличается тем, что исходный сигнал представляет собой производную, или скорость действия управляющеговоздействия, и является следствием дифференцирования позиционного алгоритма и реализуется с помощью общей работы цифрового регулятора и исполнительного механизма. Интегрирование осуществляется исполнительным механизмом (например, интегральным операционным усилителем с цифровым выходом).
При скоростном алгоритме на каждом периоде квантования определяется прирост управляющего воздействия
![]() . (1.20)
. (1.20)
Аналогично позиционному алгоритму пропорциональная составляющая управляющего воздействия при скоростном алгоритме имеет вид
![]() (1.21)
(1.21)
На основе уравнения (1.11) находим выражение для прироста интегральной составляющей
![]() (1.22)
(1.22)
Сигнал на выходе интегрально-дифференциального звена для скоростного алгоритма на основе выражения (1.13) можно записать в следующем виде
 (1.23)
(1.23)
Для цифровых систем характерно постоянное значение величины G=const регулятора на определенном промежутке времени. Принимая во внимание еп =Gn -Yn, представим скоростной алгоритм в следующем виде
![]() (1.24) из которого видно, что задача влияния регулятора G присутствует только в приросте интегральной составляющей. Если интегральную составляющую исключить, то невозможно предотвратить дрейф регулятора.
(1.24) из которого видно, что задача влияния регулятора G присутствует только в приросте интегральной составляющей. Если интегральную составляющую исключить, то невозможно предотвратить дрейф регулятора.
В реальных условиях вследствие действия помех дифференциальная составляющая управляющего воздействия на выходе системы принимает большее значение за счет скачкообразных приростов погрешности несогласованности еn = Gn -Yn.
Для уменьшения влияния высокочастотных помех применяются разные способы фильтрации дифференциальной составляющей.
Первым способом фильтрации является применение реального дифференциального звена с постоянной времени Tф = ( 10-100)T0. Сигнал на выходе такого звена в аналоговой форме можно представить в виде
 (1.25)
(1.25)
В дискретной форме при позиционном алгоритме он примет вид
 (1.26)
(1.26)
а при скоростном алгоритме
 . (1.27)
. (1.27)
Кроме ввода постоянной времени фильтра ![]() , для уменьшения влияния помехи разработан другой способ дифференцирования в дискретной форме по четырем точкам. Пусть средняя величина исходной переменной, которая регулируется за четыре попытки опрашивания, равняется
, для уменьшения влияния помехи разработан другой способ дифференцирования в дискретной форме по четырем точкам. Пусть средняя величина исходной переменной, которая регулируется за четыре попытки опрашивания, равняется
![]() (1.28)
(1.28)
Тогда
![]()
![]() .(1.29)
.(1.29)
Влияние помех снижается за счёт усреднения переменной, которая управляется. Вычисление дифференциальной составляющей в дискретной форме осуществляется на основе учета предыстории измерений у.
Принимая во внимание (1.29), скоростной алгоритм управления представим в виде

 (1.30)
(1.30)
Список литературы
1. Промышленные приборы и средства автоматизации: Справочник/Под ред. В.В.Черепковой - Л.: Машиностроение, 1987.
2. Строганов Р.П. Управляющие машины и их применение. - М., 1986.
3. Романенко В.Д., Игнатенко Б.В. Адаптивное управление технологическими процессами на базе микро-ЭВМ. - К.: Высшая школа, 1990.
2. Средства сопряжения с объектом
2.1. Технологические процессы как объекты управления
Технологические процессы представляют собой первичное звено создания материальных ценностей, обеспечивающее производство необходимой для общества продукции. Во всех технологических процессах происходит преобразование или перенесение материалов, энергии и информации.
Технологические процессы как объекты управления можно поделить на следующие группы:
непрерывные технологические объекты, в которых перемещение материалов, энергии и информации происходит в виде потоков, обеспечивающих непрерывное функционирование объекта (в химической, газовой, нефтехимической промышленности, в энергетике и т.п.);
непрерывно-дискретные технологические объекты, в которых процессы протекают в ограниченном времени, а перемещение материалов, энергии и информации происходит в виде непрерывных потоков (в металлургии и химической промышленности, например, вулканизации, полимеризации);
дискретные технологические объекты, которые характеризуются однократным протеканием процессов и перемещением материалов, энергии, информации в виде отдельных элементов (в машиностроении при изготовлении деталей).
Для того чтобы представить технологический процесс как объект управления, необходимо абстрагироваться от конкретных физических, химических или технологических условий, их характеристик, определяющих условия протекания технологических процессов. Это необходимо для создания общих принципов и методов представления объекта в теории управления независимо от разной природы объектов. При этом конкретные особенности каждого объекта должны учитываться при разработке его математической модели, способов получения информации от объекта и вывода управляющих воздействий на объект.
Рассмотрим технологический процесс в виде многомерного объекта (рис. 2.1).
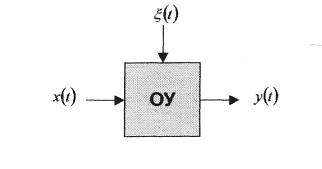
Рисунок 2.1. Схема многомерного объекта
К входным переменным Х(t)={Х1(t),...,Хn(t)} относятся параметры сырья и теплоносителей (давление, температура, химический состав, концентрация), а также параметры разных компонентов, которые принимают участие в протекании технологического процесса (температура, давление, например, воздуха, воды и инертного газа).
К выходным переменным Y(t) = {Y1(t),...,Yn(t)} можно отнести параметры выходного продукта (химический состав, размеры, концентрацию), режимные параметры объекта (температуру и давление продукта на выходе), технико-экономические показатели объекта (производительность, коэффициент полезного действия, себестоимость, затраты сырья). На технологические объекты действуют измеряемые и неизмеряемые возмущения, которые характеризуют условия протекания процесса
![]() . (2.1)
. (2.1)
К этим переменным относятся температура и влажность окружающей среды, наличие примесей в исходном сырье, а также параметры, которые определяют состояние объекта (активность катализатора, кристаллизация на внутренних стенках трубопроводов и т.д.). Значение переменных Y(t) зависит от входных переменных Х(t) и возмущений ![]() . В качестве управляющих воздействий может применяться часть входных переменных. При создании системы управления невозможно учитывать все переменные, которые влияют на ход технологического процесса. Поэтому в системе управления принимают участие только основные переменные, прежде всего те, которые определяют ход процесса.
. В качестве управляющих воздействий может применяться часть входных переменных. При создании системы управления невозможно учитывать все переменные, которые влияют на ход технологического процесса. Поэтому в системе управления принимают участие только основные переменные, прежде всего те, которые определяют ход процесса.
При рассмотрении технологического процесса как объекта управления необходимо:
- изучить технологическую схему;
- представить технологический процесс в виде некоторого числа систем, связанных между собой материальными потоками;
- получить приближенные оценки статистических параметров материальных потоков с целью отбора существенных параметров для дальнейшего создания математической модели и разработки системы управления.
Для математического описания сложного объекта автоматического управления наиболее совершенными являются экспериментально-статистические методы. Аппарат корреляционного и регрессивного анализов разрешает получить математическое описание объекта в виде полинома. Эта зависимость называется уравнением регрессии. Для накопления статистического материала используются активный и пассивный эксперименты. Лучшие результаты в построении регрессивных статистических моделей достигаются при проведении активного эксперимента.
Активный эксперимент базируется на использовании искусственных возмущений, которые вводятся в объект по ранее спланированной программе.
Математическое описание технологического процесса в статике можно представить в виде полинома (уравнения регрессии):
 (2.2)
(2.2)
Для определения коэффициентов регрессии линейной модели ![]() используются ортогональные экспериментальные планы.
используются ортогональные экспериментальные планы.
План эксперимента на двух уровнях строится таким образом, чтобы в каждом эксперименте одновременно изменялись все значения относительно начальных базовых значений. При этом каждая переменная X в интервале варьирования может принимать только два крайних значения:
![]() (2.3)
(2.3)
и обозначаться +1 и -1. Переход от нормализованных значений к кодовым определяется по формуле
 , (2.4)
, (2.4)
где хj0 - базовое значение переменной;
![]() - шаг варьирования.
- шаг варьирования.
С помощью эксперимента на двух уровнях можно получить линейную статистическую модель объекта вида
![]() (2.5)
(2.5)
где ![]() - оценки коэффициентов регрессии.
- оценки коэффициентов регрессии.
Планирование эксперимента проводят с помощью матрицы планирования, которую составляют по правилам, изложенным ниже после табл.2.1.
Таблица 2.1. Матрица планирования
|
g |
X0 |
x1 |
x2 |
x3 |
x1 x2 |
x1 x3 |
x2 x3 |
x123 |
|
|
1 |
+1 |
-1 |
-1 |
-1 |
+1 |
+1 |
+1 |
-1 |
|
|
2 |
+1 |
+1 |
-1 |
-1 |
-1 |
-1 |
+1 |
+1 |
|
|
3 |
+1 |
-1 |
+1 |
-1 |
-1 |
+1 |
-1 |
+1 |
|
|
4 |
+1 |
+1 |
+1 |
-1 |
+1 |
-1 |
-1 |
-1 |
|
|
5 |
+1 |
-1 |
-1 |
+1 |
+1 |
-1 |
-1 |
+1 |
|
|
6 |
+1 |
+1 |
-1 |
+1 |
-1 |
+1 |
-1 |
-1 |
|
|
7 |
+1 |
-1 |
+1 |
+1 |
-1 |
-1 |
+1 |
-1 |
|
|
8 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
В первой строке все управляющие факторы выбирают на нижнем уровне. Последующие варианты строят так, чтобы при переборке всех вариантов частота изменения знака фактора хі+1 была в два раза меньше, чем для предыдущего. Три столбца х1,х2,х3 соответственно создают матрицу, а другие столбцы получают перемножением соответствующих значений управляющих факторов и необходимых для расчета соответствующих коэффициентов.
Проведение эксперимента. Так как значение ответа Y носит случайный характер, то в каждой точке Xg проводят m параллельных опытов и находят среднее значение результатов исследований ![]()
![]() . (2.6)
. (2.6)
Перед реализацией плана на объекте необходимо рангомизировать варианты варьирования, т.е. с помощью таблицы равномерно распределенных случайных чисел определить последовательность реализации вариантов варьирования.
Проверка воспроизведения эксперимента представляет собой проверку гипотезы о равенстве генеральных дисперсий
![]() (2.7)
(2.7)
Оценки дисперсии определяются из формулы
 . (2.8)
. (2.8)
Для проверки гипотезы об однородности оценок пользуются критерием Кохрена
 . (2.9)
. (2.9)
Если полученное значение критерия G окажется меньше критического Gkp, найденного из таблицы, то гипотеза принимается, а если нет, то нужно увеличить число параллельных опытов.
Получение математической модели
Оценки коэффициентов ![]() находятся согласно формулам:
находятся согласно формулам:
 , (2.10)
, (2.10)
 , (2.11)
, (2.11)
 . (2.12)
. (2.12)
После определения оценок коэффициентов регрессии необходимо проверить гипотезы об их значимости с помощью критерия Стьюдента:
 , (2.13)
, (2.13)
где S - дисперсия оценки коэффициента.
Если Sign(t-tkp)= +1 - оценку признают значимой.
Если Sign(t-tkp)= -1 - ![]() = 0.
= 0.
Проверку адекватности математического описания проводят согласно F - критерию Фишера
 . (2.14)
. (2.14)
Если F<Fkp, найденного из таблицы, то гипотезу не отвергают. В противном случае математическое описание признается неадекватным и необходимо перейти к более сложной форме математического описания или проводить эксперимент с меньшим интервалом варьирования.
![]() , (2.15)
, (2.15)
где d - число членов полинома;
![]() - предусмотренная величина ответа из полученного уравнения регрессии.
- предусмотренная величина ответа из полученного уравнения регрессии.
 . (2.16)
. (2.16)
Интервал варьирования можно выбрать равным 0.05 - 0.3 от возможного диапазона варьирования факторов, т.е. область варьирования составляет 10-60% от всего диапазона. Начальную точку варьирования выбирают как можно ближе к центру области факторного пространства.
2.2. Устройства получения информации
Устройства получения информации предназначены для сбора и преобразования информации без изменения ее содержания о контролирующих и управляющих параметрах технологических процессов. К устройствам получения информации о состоянии процесса относятся чувствительные элементы или датчики, измерительные и нормирующие преобразователи. К этой же группе устройств относятся релейные (позиционные) преобразователи.
Измерительный преобразователь это совокупность чувствительного элемента, измерительного и нормирующего преобразователей. Нормирующие
преобразователи переводят выходной сигнал измерительного преобразователя с естественным выходом в унифицированный сигнал.
В настоящее время наиболее распространенные выходные сигналы: величины постоянного и переменного токов, напряжения, импульсы, модулированные по амплитуде, ширине, фазе или частоте и давление воздуха. Величины основных унифицированных сигналов установлены соответствующими стандартами и приведены в табл. 2.2.
Таблица 2.2. Унифицированные сигналы преобразователей

Для организации введения данных из датчиков необходимо осуществить опрос датчиков и определить значение измеряемых величин согласно показателям датчиков. Режим получения данных с объекта управления реализуется с помощью циклического и адресного опроса датчиков. При циклическом опросе датчики периодически опрашиваются в предварительно заданной и установленной последовательности. При этом в каждом цикле (такте квантования) отдельные датчики опрашиваются несколько раз через промежутки времени ![]() . Результаты
. Результаты ![]() опросов усредняются, и средние значения запоминаются. После этого через промежуток времени, который равен периоду квантования
опросов усредняются, и средние значения запоминаются. После этого через промежуток времени, который равен периоду квантования ![]() , весь процесс повторяется, т.е. датчики снова опрашиваются
, весь процесс повторяется, т.е. датчики снова опрашиваются ![]() раз с дискретностью
раз с дискретностью ![]() , и результаты опроса усредняются. Для большей точности желательно, чтобы
, и результаты опроса усредняются. Для большей точности желательно, чтобы ![]() при ограничении
при ограничении ![]() .
.
При адресном опрашивании по адресу, указанному оператором или определенному автоматически, опрашивается один или несколько датчиков. Для использования результатов опрашивания в алгоритмах управления необходимо определить истинные значения измерительных величин согласно показателям датчиков. Исходный сигнал датчика с истинным значением измерительного параметра X в общем случае заменяется нелинейной зависимостью вида ![]() . Для определения измерительной величины X по показателям датчика
. Для определения измерительной величины X по показателям датчика ![]() разработано много алгоритмов.
разработано много алгоритмов.
При линейной характеристике датчика значение измерительной переменной определяется следующим образом
![]() , (2.17)
, (2.17)
где ![]() - нижняя и верхняя границы шкалы измерительного параметра;
- нижняя и верхняя границы шкалы измерительного параметра;
![]() - нижняя и верхняя границы выходных сигналов датчика;
- нижняя и верхняя границы выходных сигналов датчика;
х - текущее значение параметра X;
у - выходной сигнал датчика текущего значения параметра х при каждом опросе.
При квадратичной характеристике датчика значения параметра определяются формулой
 . (2.18)
. (2.18)
Если зависимость У от Х аналитически определить невозможно, то для определения истинного значения измеряемого параметра используются аппроксимирующие полиномы
![]() , (2.19)
, (2.19)
где ![]() - постоянные коэффициенты, которые определяются таким образом, чтобы погрешность аппроксимации (2.19) не превышала допустимого значения во всем интервале измеряемого параметра
- постоянные коэффициенты, которые определяются таким образом, чтобы погрешность аппроксимации (2.19) не превышала допустимого значения во всем интервале измеряемого параметра ![]() и сигнала
и сигнала ![]() , полученного с датчика.
, полученного с датчика.
Оценка точности представления сигналов. Реальный физический сигнал ![]() , снимаемый с выхода датчика, превращается в соответствующий цифровой код. Связь между реальным сигналом
, снимаемый с выхода датчика, превращается в соответствующий цифровой код. Связь между реальным сигналом ![]() и точным невозбужденным значением сигнала на выходе датчика
и точным невозбужденным значением сигнала на выходе датчика ![]() может быть представлена в виде
может быть представлена в виде
![]() , (2.20)
, (2.20)
где ![]() - погрешность, которая вызвана несовершенством динамической характеристики датчика;
- погрешность, которая вызвана несовершенством динамической характеристики датчика;
![]() - высокочастотный низкого уровня шум на выходе датчика;
- высокочастотный низкого уровня шум на выходе датчика;
![]() - возможные сбои в работе датчика;
- возможные сбои в работе датчика;
![]() - случайная помеха, которая обусловлена дрейфом коэффициентов характеристики датчика в результате старения и других причин.
- случайная помеха, которая обусловлена дрейфом коэффициентов характеристики датчика в результате старения и других причин.
Влияние высокочастотной помехи ![]() может быть уменьшено применением алгоритмов усреднения, которые реализуют функции выделения постоянной составляющей сигнала в реальном времени и фильтрации случайных выбросов.
может быть уменьшено применением алгоритмов усреднения, которые реализуют функции выделения постоянной составляющей сигнала в реальном времени и фильтрации случайных выбросов.
Для реализации фильтров высокочастотных помех применяется алгоритм усреднения с бесконечной памятью. Допустим, что на сигнал постоянной величины ![]() накладывается случайная помеха
накладывается случайная помеха ![]() так, чтобы измерительный сигнал, который снимается с датчика, был равен
так, чтобы измерительный сигнал, который снимается с датчика, был равен
![]() . (2.21)
. (2.21)
Определим значение постоянного сигнала ![]() по методике наименьших квадратов
по методике наименьших квадратов
 . (2.22)
. (2.22)
Благодаря минимизации функции потерь ![]() из условия
из условия  , получаем усредненную оценку
, получаем усредненную оценку
 . (2.23)
. (2.23)
Алгоритм усреднения в рекурентной форме получается путем вычитания предыдущей оценки ![]() из (2.23):
из (2.23):
![]() . (2.24)
. (2.24)
Рассмотренный алгоритм не применяется для оценки сигнала ![]() , который изменяется медленно. В этом случае применяется алгоритм усреднения с ослабленной памятью. В предыдущем алгоритме предусматривалось, что оцениваемая координата
, который изменяется медленно. В этом случае применяется алгоритм усреднения с ослабленной памятью. В предыдущем алгоритме предусматривалось, что оцениваемая координата ![]() в интервале
в интервале ![]() измерений остается постоянной. В этом случае в отдельные измерения
измерений остается постоянной. В этом случае в отдельные измерения ![]() входят значения с одинаковыми весами, независимые от дискретного времени
входят значения с одинаковыми весами, независимые от дискретного времени ![]() . Если нужно отследить медленно изменяющийся сигнал
. Если нужно отследить медленно изменяющийся сигнал ![]() , то новым измерениям необходимо увеличить вес сравнительно с теми, которые были получены раньше. Усредненная оценка параметра
, то новым измерениям необходимо увеличить вес сравнительно с теми, которые были получены раньше. Усредненная оценка параметра
 , (2.25)
, (2.25)
где величина ![]() выбирается порядка 0.95.
выбирается порядка 0.95.
Алгоритм усреднения получим в виде
![]() , (2.26)
, (2.26)
где ![]() - усредненное значение сигнала
- усредненное значение сигнала ![]() , снимаемого с датчика.
, снимаемого с датчика.
Для устранения ![]() применяют алгоритмы перехода контролирующего параметра за допустимые границы. Простейший алгоритм базируется на отбраковке следующего опрошенного сигнала
применяют алгоритмы перехода контролирующего параметра за допустимые границы. Простейший алгоритм базируется на отбраковке следующего опрошенного сигнала ![]() при выходе его за известный диапазон изменения
при выходе его за известный диапазон изменения ![]() . Если известная погрешность сигнала
. Если известная погрешность сигнала ![]() и диапазон изменения
и диапазон изменения ![]() , то значение сигнала
, то значение сигнала ![]() при
при ![]() -м опросе бракуется, если для него не выполняется условие
-м опросе бракуется, если для него не выполняется условие
![]() . (2.27)
. (2.27)
При этом ![]() заменяют предыдущим по времени небракованным значением сигнала
заменяют предыдущим по времени небракованным значением сигнала ![]() . Более тщательное устранение сбоев
. Более тщательное устранение сбоев ![]() выполняется с учетом диапазона
выполняется с учетом диапазона ![]() и скорости изменения
и скорости изменения ![]() при известной погрешности сигнала
при известной погрешности сигнала ![]() . При этом сигнал
. При этом сигнал ![]() бракуется, если не выполняется хотя бы одно из неравенств:
бракуется, если не выполняется хотя бы одно из неравенств:
![]() (2.28)
(2.28)
![]() . (2.29)
. (2.29)
При преобразовании в АЦП аналогового сигнала ![]() в цифровой код возникает погрешность округления, которая равняется половине последнего верного разряда кода числа, которую условно можно отнести к составной
в цифровой код возникает погрешность округления, которая равняется половине последнего верного разряда кода числа, которую условно можно отнести к составной ![]() .
.
2.3. Преобразование сигналов датчиков
Процесс преобразования аналоговых сигналов в цифровые, кроме процедуры преобразования, включают в себя операции обработки аналоговых сигналов, определенных условиями заданного качества сигнала, а в отдельных случаях необходимостью проведения функцио-нальных преобразований.
Большинство датчиков имеют большое исходное сопротивление и малый динамический диапазон, поэтому необходимо согласование выходных параметров датчиков с параметрами входных цепей системы обработки данных. В качестве устройств согласования чаще всего применяются операционные усилители, которые представляют собой усилители постоянного тока с большим коэффициентом усиления (например, ![]() ).
).
Рассмотрим основные схемы включения операционных усилителей: инвертирующий усилитель (рис. 2.2.) и неинвертирующий усилитель (рис.2.3).
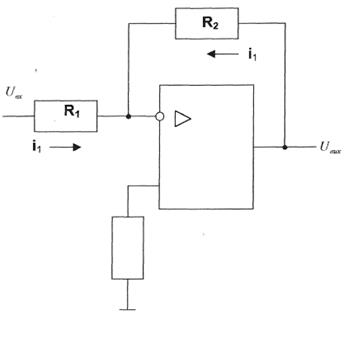
Рисунок 2.2. Инвертирующий усилитель
Перед анализом схемы вспомним основные правила:
- выход операционного усилителя стремится достичь такого состояния, чтобы разность напряжений между его входами была равна 0;
- входы операционного усилителя тока не потребляют.
Согласно первому и второму законам Кирхгофа можно записать
![]() , (2.30)
, (2.30)
тогда коэффициент усиления по напряжению для схемы инвертирующего усилителя
![]() . (2.31)
. (2.31)
Недостатком схемы является то, что она имеет малый входной импеданс. Этот недостаток устраняет схема неинвертирующего усилителя (рис. 2.3), для которого
![]() , (2.32)
, (2.32)
отсюда коэффициент усиления по напряжению
![]() . (2.33)
. (2.33)
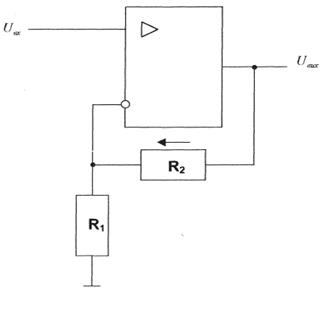
Рисунок 2.3. Неинвертирующий усилитель
Схема усилителя с единичным коэффициентом усиления (повторителя напряжения) приведена на рис.2.4.
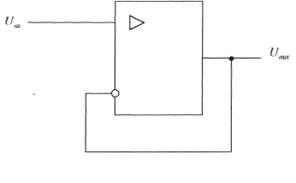
Рисунок 2.4. Повторитель напряжения
Такой усилитель также называют буфером, так как он имеет изолирующие свойства (большой входной импеданс и малый исходный).
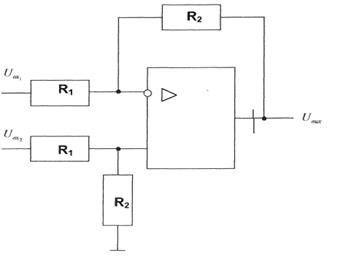
Рисунок 2.5. Дифференциальный усилитель
Схема дифференциального усилителя (рис. 2.5) пред-ставляет собой комбинацию инвертирующего и неинверти-рующего усилителей.
Для дифференциального усилителя можно записать
![]() (2.34)
(2.34)
На практике часто необходимо ввести в исходный сигнал дифференциального усилителя постоянную составляющую. Это можно реализовать путем подключения источника смещения к инвертирующему входу операционного усилителя (рис.2.6).
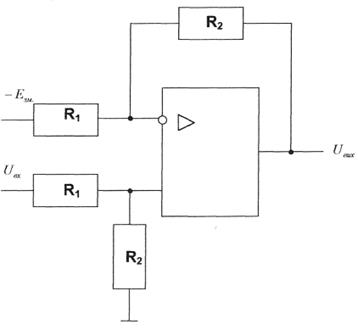
Рисунок 2.6. Смещение уровня
При введении смещения формула выходного напряжения имеет вид
![]() (2.35)
(2.35)
Если входной сигнал изменяется в пределах от ![]() до
до ![]() и
и ![]() , то выходной сигнал будет изменяться от 0 до
, то выходной сигнал будет изменяться от 0 до ![]() . Коэффициент усиления k определяется соотношением резисторов
. Коэффициент усиления k определяется соотношением резисторов ![]() и
и ![]() .
.
Если выходной сигнал датчика - токовый, а для дальнейшей обработки сигнала требуется определённый уровень напряжения, то его необходимо превратить в напряжение и усилить до необходимого значения. Реализуем на базе операционного усилителя схему преобразователь ток-напряжение (рис. 2.7).
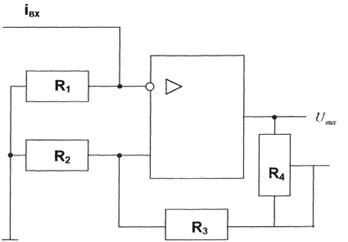
Рисунок 2.7. Преобразователь ток/напряжение
Преобразование входного тока ![]() в напряжение осуществляется на резисторе R1, падение напряжения на котором усиливается на операционном усилителе, включенном по схеме неинвертирующего усилителя. Коэффициент усиления определяется соотношением резисторов R3+R4 и R2. Резистор R4 использован для коррекции значения коэффициента усиления.
в напряжение осуществляется на резисторе R1, падение напряжения на котором усиливается на операционном усилителе, включенном по схеме неинвертирующего усилителя. Коэффициент усиления определяется соотношением резисторов R3+R4 и R2. Резистор R4 использован для коррекции значения коэффициента усиления.
В случаях, если необходимо ограничить диапазон изменения сигнала, например, напряжения, то можно воспользоваться амплитудными ограничителями (рис.2.8), представляющими собой инвертирующий усилитель, в цепь обратной связи которого включен стабилитрон.
Напряжение стабилизации ![]() и прямое напряжение стабилитрона определяют границы исходного напряжения. Исходное напряжение может быть инвертировано путем изменения полярности включения стабилитрона.
и прямое напряжение стабилитрона определяют границы исходного напряжения. Исходное напряжение может быть инвертировано путем изменения полярности включения стабилитрона.
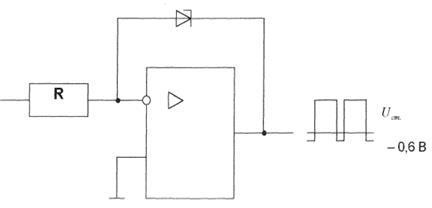
Рисунок 2.8. Амплитудный ограничитель
Для согласования датчиков с частотным выходом используют преобразователи частота-напряжение. В качестве такого преобразователя можно использовать микросхему К1108ПП1. Схема включения микросхемы в режиме преобразователя частота-напряжение приведена на рис 2.9.
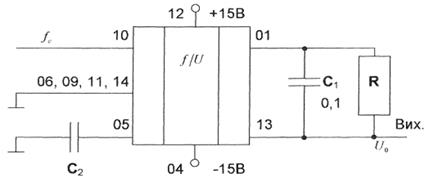
Рисунок 2.9. Преобразователь частота – напряжение
Для такого типа преобразователя можно записать
![]() , (2.36)
, (2.36)
где R- нагрузка усилителя и С2 – входная ёмкость .
В дальнейшем аналоговые сигналы по параллельным каналам поступают на аналоговые коммутаторы (мультиплексоры). Для построения мультиплексоров рационально использовать многовыходные интегральные коммутаторы, например, серии 590. Условное графическое изображение мультиплексора на 8 входов приведено на рис. 2.10.
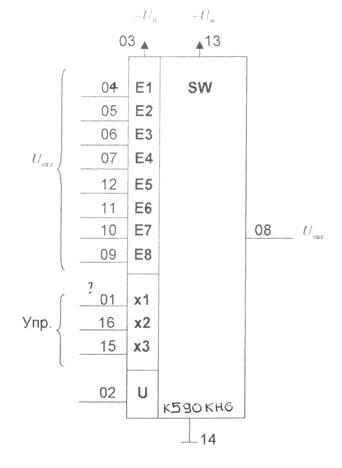
Рисунок 2.10. Мультиплексор 8 х 1
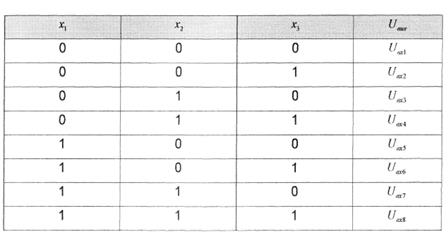
Данный мультиплексор имеет возможность коммутации сигналов, уровень которых достигает ![]() , в соответствии с табл. 2.2.
, в соответствии с табл. 2.2.
Таблица 2.2 – Коммутация сигналов мультиплексора
При необходимости построения мультиплексоров с большим числом каналов используют разные многоступенчатые конфигурации аналоговых коммутаторов (рис. 2.11).
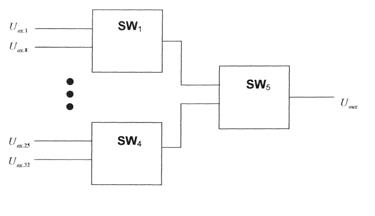
Рисунок 2.11. Мультиплексор 32 х 1
Применение мультиплексоров для переключения режимов работы и изменения параметров аналоговых корректирующих устройств позволяет получить простые и надежные схемы. Рассмотрим корректирующую схему пропорционально-интегрального регулятора (рис.2.12).
Эта схема реализует передаточную функцию
![]() ,
,
где ![]() - оператор Лапласа;
- оператор Лапласа;
![]() - коэффициент передачи пропорционального элемента (DA1);
- коэффициент передачи пропорционального элемента (DA1);
![]() - коэффициент передачи i-го потенциометра пропорционального элемента (
- коэффициент передачи i-го потенциометра пропорционального элемента (![]() для R1,
для R1, ![]() для R2);
для R2);
![]() - коэффициент передачи интегрального элемента (DA2);
- коэффициент передачи интегрального элемента (DA2);
![]() - коэффициент передачи i-го потенциометра интегрирующего элемента (
- коэффициент передачи i-го потенциометра интегрирующего элемента (![]() для R3,
для R3, ![]() для R4).
для R4).
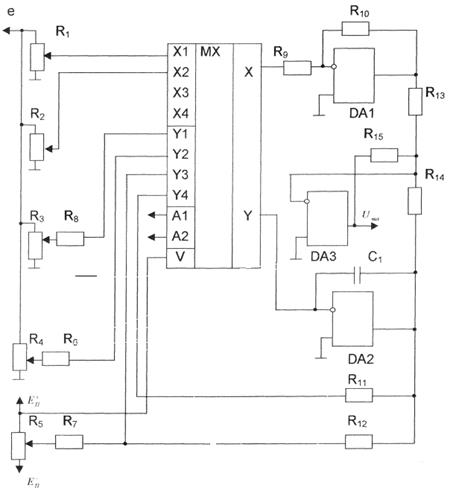
Рисунок 2.12. Корректирующая схема ПИ-регулятора
Приведенная схема позволяет управлять параметрами пропорционального и интегрирующего элементов. При сигнале «0» на входе DА2 схема работает в режиме формирования управляющего воздействия .
При сигнале «0» на входе DА1 параметры корректирующей схемы задаются потенциометрами R1 и R3, при сигнале «1» - R2 и R4. Необходимость изменения параметров корректирующей схемы возникает при управлении объектами или в случае, когда необходимо изменять параметры процесса управления.
Схема разрешает устанавливать нулевое значение исходного сигнала ![]() . Отключение исходного сигнала происходит при значениях, равных «0» и «1» на входах DА1 и DА2 соответственно. Для интегрирующего элемента в тот же момент устанавливается начальный нулевой заряд конденсатора С1. Если на входах DА1 и DА2 формируется сигнал «1», то на выходе интегрирующего элемента устанавливается начальное значение напряжения, которое задается потенциометром R5.
. Отключение исходного сигнала происходит при значениях, равных «0» и «1» на входах DА1 и DА2 соответственно. Для интегрирующего элемента в тот же момент устанавливается начальный нулевой заряд конденсатора С1. Если на входах DА1 и DА2 формируется сигнал «1», то на выходе интегрирующего элемента устанавливается начальное значение напряжения, которое задается потенциометром R5.
Для практической реализации схемы целесообразно выбирать параметры элементов равными соотношениям:
R10/R9=KП; R6=R8; R6C1=1/Kj; R7=R12;
R11С1=![]() ; R12C2=
; R12C2=![]() ; R13=R14=R15,
; R13=R14=R15,
где ![]() - постоянная времени разряда конденсатора С1 при задании нулевого значения исходного сигнала
- постоянная времени разряда конденсатора С1 при задании нулевого значения исходного сигнала ![]() ;
;
![]() - постоянная времени перезаряда конденсатора С1 при задании начального значения исходного сигнала
- постоянная времени перезаряда конденсатора С1 при задании начального значения исходного сигнала ![]() .
.
Мультиплексоры также могут использоваться для моделирования дискретных элементов при переключениях , которые фиксируют значения непрерывных сигналов. В частности, можно реализовать модель квантователя непрерывного сигнала (рис.2.13а). Управляющие импульсы ![]() с частотой квантования
с частотой квантования ![]() поступают на вход счетного триггера DD1. На выходе триггера формируются импульсы с продолжительностью
поступают на вход счетного триггера DD1. На выходе триггера формируются импульсы с продолжительностью ![]() и периодом повторения
и периодом повторения ![]() (рис.2.13б).
(рис.2.13б).
Импульсы ![]() вызывают переключение мультиплексора DA1 таким образом, что на протяжении одного периода
вызывают переключение мультиплексора DA1 таким образом, что на протяжении одного периода ![]() входной сигнал
входной сигнал ![]() поступает через резистор R1 на конденсатор С1, а вход операционного усилителя DA2 подключается к конденсатору С2. На протяжении второго полупериода через резистор R1 заряжается конденсатор С2, а на вход операционного усилителя подается сигнал, зафиксированный на конденсаторе С1. Таким образом, при работе схемы на вход операционного усилителя подается кусочно-постоянный сигнал, значение которого равняется значению входного сигнала в момент переключения триггера DD1. Операционный усилитель необходимый для уменьшения тока разряда конденсаторов С1 и С2 через сопротивление нагрузки. При R2=R3 модель квантователя имеет единичный коэффициент передачи. Емкости конденсаторов С1 и С2 одинаковые, их выбирают таким образом, чтобы разряд через входные звенья операционного усилителя на протяжении одного периода
поступает через резистор R1 на конденсатор С1, а вход операционного усилителя DA2 подключается к конденсатору С2. На протяжении второго полупериода через резистор R1 заряжается конденсатор С2, а на вход операционного усилителя подается сигнал, зафиксированный на конденсаторе С1. Таким образом, при работе схемы на вход операционного усилителя подается кусочно-постоянный сигнал, значение которого равняется значению входного сигнала в момент переключения триггера DD1. Операционный усилитель необходимый для уменьшения тока разряда конденсаторов С1 и С2 через сопротивление нагрузки. При R2=R3 модель квантователя имеет единичный коэффициент передачи. Емкости конденсаторов С1 и С2 одинаковые, их выбирают таким образом, чтобы разряд через входные звенья операционного усилителя на протяжении одного периода ![]() не превышал заданной погрешности фиксирования сигнала при выполнении условия
не превышал заданной погрешности фиксирования сигнала при выполнении условия
![]() ,
,
где rm - внутреннее проходное сопротивление открытого электронного ключа мультиплексора.
Если постоянная времени заряда конденсатора ![]() намного меньше
намного меньше ![]() , то к моменту окончания каждого периода квантования он оказывается заряженным до напряжения входного сигнала
, то к моменту окончания каждого периода квантования он оказывается заряженным до напряжения входного сигнала ![]() .
.
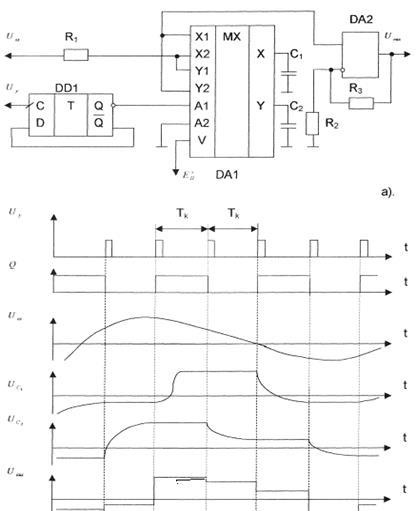
Рис 2.14. Схема модели квантователя непрерывного сигнала (а) и эпюры напряжения
![]()
Рисунок 2.13 – Схема модели квантователя непрерывного сигнала (а) и эпюры напряжений (б)
Для запоминания переменных аналоговых сигналов на время преобразования, коммутации и других операций в системах используют схемы выборки-хранения (рис. 2.14).
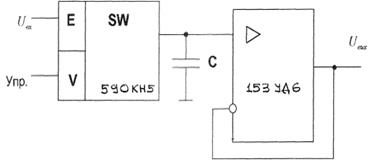
Рисунок 2.14. Схема выборки-хранения
Элементом памяти схемы выборки-хранения является конденсатор С, который подключается на время выборки к источнику сигнала. Время выборки сигнала определяется из соотношения
![]() , (2.37)
, (2.37)
где ![]() - сопротивление открытого ключа (для К590КН5
- сопротивление открытого ключа (для К590КН5![]() );
); ![]() - сопротивление источника сигнала; С - емкость конденсатора.
- сопротивление источника сигнала; С - емкость конденсатора.
В практических схемах широко используется микросхема К1100СК2, предназначенная для выборки и хранения аналогового сигнала, который запоминается по команде, поступающей на логический вход С1, входной сигнал подаётся на ![]() , а постоянное значение сигнала поддерживается на выходе
, а постоянное значение сигнала поддерживается на выходе ![]() . Схема включения К1102СК2 приведена на рис.2.15.
. Схема включения К1102СК2 приведена на рис.2.15.
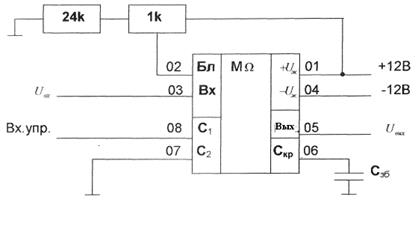
Рисунок 2.15. Схема выборки/хранения
Входной сигнал равен ![]() = 5В. Режиму выборки соответствует «1» на входе управления C1, а режиму хранения- «0» при Cзб = 1000пФ и
= 5В. Режиму выборки соответствует «1» на входе управления C1, а режиму хранения- «0» при Cзб = 1000пФ и ![]() .
.
После необходимых преобразований сигналов, которые поступают от датчиков, нужно перейти к процедуре преобразования аналоговых сигналов в цифровой код и дальнейшей их обработки.
2.4. Аналого-цифровые и цифро-аналоговые преобразователи
Неотъемлемой частью современных автоматических систем контроля и управления являются преобразователи аналоговых и цифровых сигналов:
- аналого-цифровые преобразователи (АЦП);
- цифро-аналоговые преобразователи (ЦАП).
ЦАП - устройство, которое создает на выходе аналоговый сигнал (ток и напряжение), пропорциональный входному сигналу. При этом значение выходного сигнала зависит от опорного напряжения, которое определяет полную шкалу выходного сигнала. Если вместо опорного напряжения использовать любой аналоговый сигнал, то выходной сигнал ЦАП будет пропорциональный произведению входных цифровых и аналоговых сигналов. В АЦП цифровой код на выходе определяется отношением преобразующего входного аналогового сигнала к опорному сигналу, который отвечает полной шкале. Если опорный сигнал изменяется по любому закону, то цифровой сигнал на выходе АЦП будет пропорциональный отношению двух аналоговых (входного и опорного) сигналов. В этом случае АЦП можно рассматривать как измеритель отношений или делитель напряжения с цифровым выходом.
В зависимости от области применения на входе ЦАП или выходе АЦП могут быть или однополярные цифровые коды, или биполярные. К первым относятся прямой двоичный и двоично-десятичный коды, а ко вторым - двоичный код со смещением.
В стандартном двоичном коде старший разряд имеет вес 
от значения полной шкалы. Разряд, который следует за старшим разрядом, имеет вес ![]() и так далее в направлении к младшему разряду с весом
и так далее в направлении к младшему разряду с весом ![]() , где М - число разрядов преобразователя.
, где М - число разрядов преобразователя.
Сумма всех разрядов определяет значение полной шкалы преобразователя. Двоичный код со смещением отличается от прямого тем, что ноль двоичного числа и ноль аналоговой величины не совпадают, как в стандартном двоичном коде, а смещены таким образом, что в старшем разряде устанавливается «0» для всех отрицательных и «1» для всех положительных величин. Поэтому старший разряд определяет полярность цифрового кода (рис. 2.16). Из рисунка видно, что прямой код дает возможность использовать в два раза большую раздельность по сравнению со смещенным.
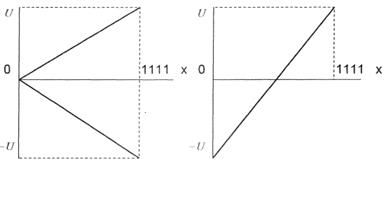
Рисунок 2.16. Графики соответствия цифровых кодов и аналоговых напряжений
Основными параметрами, которые характеризуют ЦАП и АЦП, являются:
статические характеристики – это нелинейность, монотонность, коэффициент преобразования, абсолютная и относительная погрешность, смещение нуля, раздельная способность;
динамические характеристики – это время установ-ления, время преобразования.
Раздельная способность определяет число дискретных значений исходного сигнала преобразователя, которые составляют его границы преобразования. Может выражаться или в процентах, или в долях к полной шкале, например, двенадцатиразрядный АЦП имеет раздельную способность 1/4096 или 0,0245% полной шкалы.
Нелинейность характеризуется отклонением значений реальной характеристики преобразователя от прямой. Преобразователь считается линейным, если его максимальная погрешность линейности не превышает половины младшего разряда преобразователя.
Монотонность преобразователя означает, что при каждом приращении входного сигнала происходит прирост выходного сигнала - первая производная от непрерывной функции выход-вход должна быть меньшей нуля.
Коэффициент преобразования - это отношение прироста выходного сигнала к приросту входного сигнала, определяющий угол отклонения характеристики. Для идеального ЦАП отклонение характеристики должно быть таким, чтобы при включении всех разрядов исходное напряжение преобразователя было меньше опорного напряжения на величину младшего разряда.
Степень отклонения реального значения коэффициента преобразования от расчетного характеризуется абсолютной погрешностью, под которой понимают разность между номинальным значением напряжения полной шкалы преобразователя и фактическим его значением.
Погрешность нуля (смещение) для ЦАП - это исходное напряжение ЦАП с нулевым входным кодом, а для АЦП - среднее значение входного напряжения АЦП, которое необходимо для получения нулевого кода на его выходе.
Время установления исходного сигнала ЦАП является важным динамическим параметром и определяется как интервал времени, на протяжении которого исходный аналоговый сигнал ЦАП при изменении кодовой комбинации на его цифровых входах достигает своего установленного значения, которое не превышает предельной погрешности.
Рассмотрим характеристики, которые помогают выбрать тип преобразователя для конкретного применения в разрабатываемых системах и устройствах. Практическую реализацию многоразрядных схем АЦП и ЦАП рационально проводить на основе микросхем, которые содержат основные блоки преобразователей в одном корпусе.
В табл. 2.3 приведены основные типы и параметры микросхем, на основе которых реализуются аналого-цифровые и цифро-аналоговые преобразователи (n -число разрядов, tnp - время преобразования).
Рассмотрим схемы включения и функциональные возможности микросхемы К572ПВ1, которую можно использовать как в режиме АЦП, так и в режиме ЦАП.
На рис. 2.17 приведена схема включения микросхемы в режим АЦП.
Этот АЦП имеет входные каскады с тремя состояниями, благодаря чему может выдавать информацию на системную шину микропроцессорного контроллера. Кодовые выходы могут использоваться не только для вывода, а также для введения дискретных сигналов, так как кодовый канал двунаправленный. Переключение кодового канала на ввод или вывод выполняется сигналом, который подается на вход V (режим).
Таблица 2.3 – Типы АЦП - ЦАП
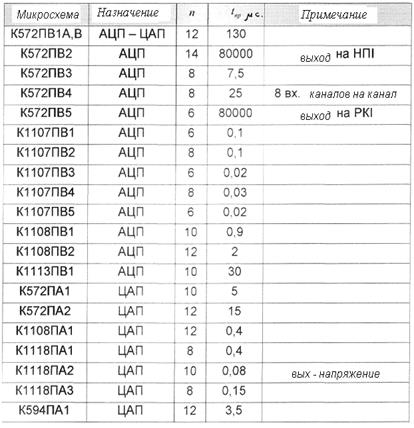
Если V = 0 - вывод, то V = 1 - ввод. Перевод канала в высокоимпедансное состояние выполняется при LE=0 (управление 8 младшими разрядами канала) и НЕ=0 (управление 4 старшими разрядами).
Благодаря наличию этих входов информация с АЦП может выводиться побайтно на восьмиразрядную шину данных.
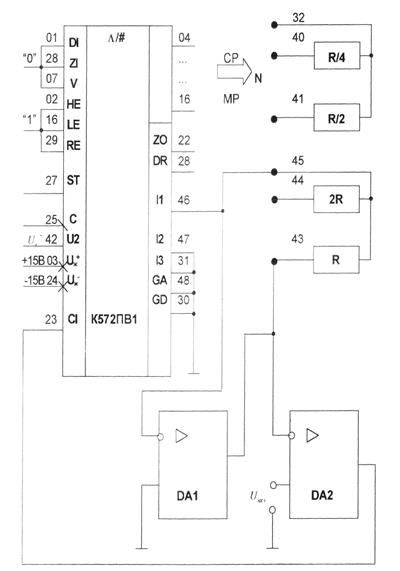
Рисунок 2.17. Режим АЦП
Работа преобразователя синхронизируется тактовыми импульсами, которые подаются на вход С с частотой не больше 250 кГц. Опорное напряжение должно иметь противоположную полярность напряжения ![]() . Операционный усилитель DA1 используется для преобразования в напряжение выходного тока. В качестве резистора обратной связи DA1 используется один из резисторов, которые входят в микросхему (выводы 43 и 45)
. Операционный усилитель DA1 используется для преобразования в напряжение выходного тока. В качестве резистора обратной связи DA1 используется один из резисторов, которые входят в микросхему (выводы 43 и 45) ![]() . Компаратор DA2 сравнивает исходное напряжение DA1 с
. Компаратор DA2 сравнивает исходное напряжение DA1 с ![]() . Результат сравнения подается на вход С1. Запуск АЦП проводится положительным импульсом, который подается на вход ST (старт). Цикл преобразования содержит 28 периодов тактовых импульсов, после чего на выходе DR (готовность данных) формируется положительный импульс. Для организации циклической работы АЦП необходимо соединить между собой ZO (выход цикла) и ZI (вход цикла).
. Результат сравнения подается на вход С1. Запуск АЦП проводится положительным импульсом, который подается на вход ST (старт). Цикл преобразования содержит 28 периодов тактовых импульсов, после чего на выходе DR (готовность данных) формируется положительный импульс. Для организации циклической работы АЦП необходимо соединить между собой ZO (выход цикла) и ZI (вход цикла).
Схема включения микросхемы К572ПВ1 в режиме ЦАП приведена на рис. 2.18.
В этом случае на вход V подается «1» и через кодовый канал входной код N записывается в регистр АЦП. Внешняя кодовая комбинация в регистр может быть записана также последовательно по входу DI синхронно с парами тактовых импульсов, начиная от младших разрядов. Вход RE разрешает изменение кода во входном регистре при RE=1.
Если RE=0 – формируется сигнал сохранения введен-ного кода. Выводы GA и GD - аналоговая и цифровая земля.
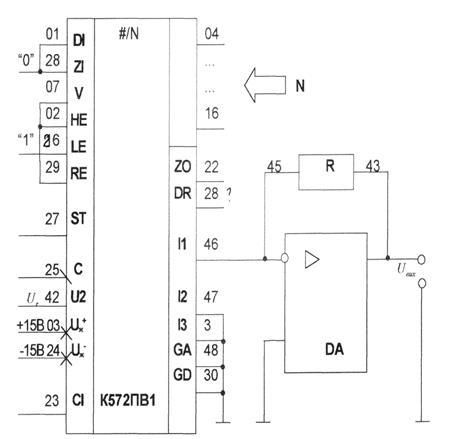
Рисунок 2.18. Режим ЦАП
Список литературы
Романенко В.Д., Игнатенко Б.В. Адаптивное управление технологическими процессами на базе микро-ЭВМ. - К.: Высшая школа, 1990.
Микропроцессоры /Под ред. Л.Н. Преснухина - М.: Высшая школа, 1986.- Т.2.
Гутников B.C. Интегральная электроника в измерительных устройствах. - Л.: Энергоатомиздат, 1988.
Цифровые и аналоговые микросхемы: Справочник /Под ред. С.В. Якубовского - М.: Радио и связь, 1990.
Микроэлектронные устройства автоматики /Под ред. А.А.Сазонова - М.: Энергоиздат, 1991.
3. Микропроцессорные средства систем управления
3.1. Интерфейсы систем управления
Одним из определяющих моментов в проектировании систем управления с использованием СВТ является выбор совокупности унифицированных аппаратных, программных и конструктивных средств, необходимых для реализации алгоритмов взаимодействия разнообразных функциональных устройств, иначе говоря, выбор интерфейса или в общем случае совокупности интерфейсов для конкретной системы.
По функциональному назначению интерфейсы делятся на магистральные (внутримашинные), внешние интерфейсы периферийных устройств, системные (интерфейсы локальных сетей).
Наибольший интерес представляют внешние интерфейсы периферийных устройств, которые обеспечивают связь датчиков информации, исполнительных органов, территориально отдаленных от процессора на десятки или сотни метров. В таких интерфейсах используется как параллельный, так и последовательный способы обмена информацией.
Основные технические характеристики интерфейсов периферийных устройств, которые широко применяются, приведены в табл. 3.1.
КОП - многомагистральный канал общего поль-зования обеспечивает соединение программируемых и непрограммируемых электронных измерительных устройств, которые применяются в лабораторных или цеховых условиях. Схема включения и структура КОП приведена на рис.3.1.
Устройство А способно управлять передачей, передавать и принимать информацию, В - передавать и принимать информацию, С - только передавать или только принимать информацию. MD, МС, МУ - соответственно магистрали данных (восьмиразрядные), синхронизации и управления.
Примерами наиболее распространенных последовательных интерфейсов периферийных устройств могут служить интерфейсы RS-232C, RS-423, RS-422. В основе интерфейсов RS-232C, RS-423 лежит одноведущая несогласованная линия, по которой информация передается двуполярными посылками.
В одноведущей линии для передачи сигнала используется один провод, напряжение на котором сравнивается с напряжением приемника линии общей шины.
Этот способ построения линии наиболее простой, но имеет существенный недостаток: на информационный сигнал накладываются помехи в линии, которые в свою очередь обуславливают ограничение длины линии и скорость передачи. Например, в интерфейсе RS-423 при скорости передачи информации 3 кбод длина линии всего лишь 12м. Интерфейс RS-422 применяется на симметричных дифференциальных линиях (витая пара, радиочастотный кабель), которые имеют более высокие характеристики, чем одноведущие. В частности, по линии интерфейса RS-422 возможна передача информации со скоростью до 100 кбод на расстояние до 1000 м, а при скорости 10 Мбод - до 12 м.
Таблица 3.1 - Типы интерфейсов
|
Технические характеристики |
Интерфейс |
||||
|
КОП |
RS232 |
RS423 |
RS422 |
MIL-STD1553 |
|
|
Скорость передачи информации |
8*10 |
20 |
300 |
10000 |
125 |
|
Длина магистрали (м) |
20 |
15 |
600 |
1200 |
100 |
|
Кол-во линий интерфейса |
16 |
1 |
1 |
2 |
2 |
|
Способ обмена информацией |
пара-лель-й |
после-дов-й |
после-дов - й |
после-дов-й |
последов-й |
|
Режим обмена |
полу-дуп-лекс |
симп-лекс |
симп-лекс |
симп-лекс, полу-дуп-лекс |
симплекс, полудуплекс, мульти- плексор |
Рисунок 3.1. Структура КОП
Рассмотренные интерфейсы разрешают организовать обмен информацией в симплексном, полудуплексном, дуплексном и мультиплексном режимах. Для случая связи двух абонентов в симплексном режиме только один из двух абонентов может инициировать в любой момент времени передачу информации по интерфейсу (рис. 3.2а).
Для случая связи абонентов в полудуплексном режиме любой абонент может начать передачу информации второму, если линия связи интерфейса при этом оказывается свободной (рис. 3.2б).
Для случая связи абонентов в дуплексном режиме каждый абонент может начать передачу информации другому в произвольный момент времени (рис. 3.2в).
Для случая абонентов в мультиплексном режиме в произвольный момент времени связь может быть осуществлена между парой абонентов в любом, но одном направлении от одного из абонентов к другому (рис. 3.2г).
При организации интерфейса с внешними устройствами иногда необходимо обеспечение совместимости уровней сигналов. При этом используются технические средства - преобразователи уровней. В составе схем малой и средней степени интеграции ТТЛ-, ЕЗЛ-, КМДН-типа есть специально разработанные преобразователи уровней. Среди них можно выделить преобразователи ЕЗЛ-ТТЛ (К500ПУ125), ЕЗЛ-ТТЛ (К500ПУ124), КМДН-ТТЛ (176ПУ1, 176ПУ2, 176ПУЗ, 564ПУ4, 564ЛН1, 564ЛН2), КМДН- ТТЛ (К155ЛНЗ, К155ЛН5) и др. В случае, если необходимо разработать специальный преобразователь, можно воспользоваться одной из следующих схем:
- делитель напряжения;
- фиксаторы уровней;
- устройства, сдвигающие уровни;
- ключевые транзисторные схемы;
- схемы, работающие на принципе переключения тока;
- оптронные переключатели;
- трансформаторные схемы.
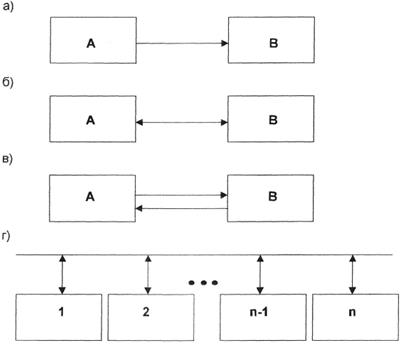
Рисунок 3.2. Режим обмена информацией
а) симплексный; б) полудуплексный; в) дуплексный; г) мультиплексный.
Делители напряжения применяют для преобразования высоких уровней напряжения в низкие. На рис. 3.3 приведен пример соединения схемы КМДН-типа, которые работают с низким уровнем напряжения источника питания. Для схемы можно рекомендовать R1 = 20 кОм, R2 = 10 кОм.
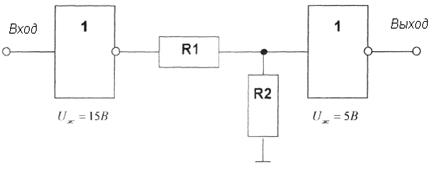
Рисунок 3.3. Преобразователь высокого уровня напряжения в низкий
На рис.3.4. приведен пример схемы преобразователя уровней на основе схемы фиксатора потенциалов. Необходимо преобразовать высокий потенциал 27В в уровень, необходимый для работы схемы КМДН-типа,
напряжением питания +5В. При разомкнутом ключе уровень ![]() обеспечивается резистором R2. При запертом ключе на выходе схемы будет действовать потенциал, равный
обеспечивается резистором R2. При запертом ключе на выходе схемы будет действовать потенциал, равный ![]() . Выбираем R1 = 10 кОм, а R2 = 10 кОм.
. Выбираем R1 = 10 кОм, а R2 = 10 кОм.
На рис.3.5. приведена схема, преобразующая сигнал низкоомного датчика от уровней напряжения +5В и + 4,1В до уровней -0.7, -1,6 В для стандартного элемента ЕЗЛ-типа. Очевидно, что напряжение пробоя стабилитрона равно 5.7В. Задаваясь током, который проходит через стабилитрон, равным 5мА (при условии, что такой ток обеспечивает исходная цепь датчика), определим
![]()
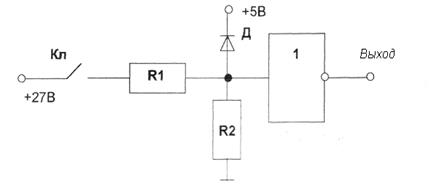
Рисунок 3.4. Преобразователи уровней на основе схемы фиксатора потенциалов
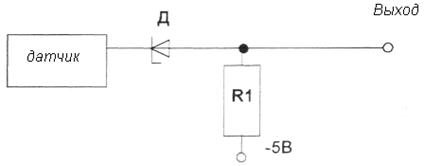
Рисунок 3.5. Схема сдвига уровней
Схемы, работающие на принципе переключения тока, используются в качестве преобразователей уровней в случаях, когда логический перепад может составлять доли вольта.
На рис. 3.6 приведена схема преобразователя уровня +1,5В, +1,0В в уровни схем ТТЛ-типа. Для схемы можно рекомендовать R1 = 1,5 кОм, R2 = 0,68 кОм, R3 = 1,2 кОм, ![]() = 20мА, схема нагружена на 10 схем ТТЛ-типа.
= 20мА, схема нагружена на 10 схем ТТЛ-типа.
Оптронные переключатели используются для гальванической развязки электрических цепей при одновременном преобразовании уровней.
На рис. 3.7 приведена схема преобразователя уровней тока в уровни схем ТТЛ-типа.
На рис. 3.8 приведен пример использования схемы трансформаторного преобразователя уровней.
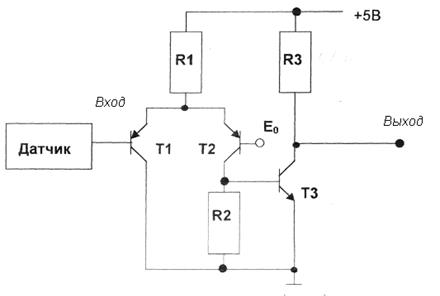
Рисунок 3.6. Преобразователь уровня
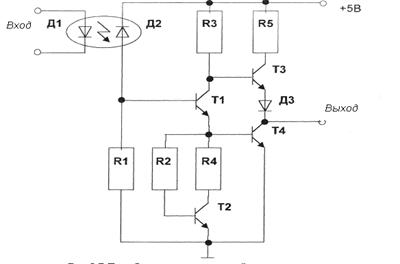
Рисунок 3.7. Преобразователь уровней тока в уровни схем ТТЛ - типа
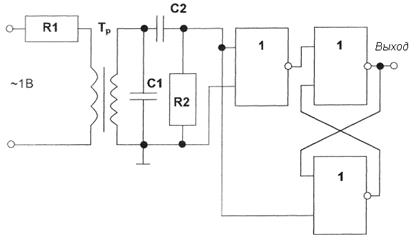
Рисунок 3.8. Схема трансформаторного преобразователя уровней
3.2. Организация параллельного интерфейса
В системах управления для реализации интерфейса микропроцессорной системы с периферийными устройствами в качестве устройства ввода-вывода используется БИС KP580BB55, которая представляет собой универсальную, программируемую БИC, с помощью которой возможна организация синхронного и асинхронного обмена в параллельном формате практически с любым несерийным оборудованием. В состав БИC (рис. 3.9) входят три восьмиразрядных канала PA, PB, PC, схема управления с регистром управляющего слова (РУС).
Обмен информацией между каналами ввода-вывода и шиной данных МП системы осуществляется через двунаправленную шину данных DO-D7. Управляющими сигналами являются: RD, WR, CS, а также АО и А1, которые определяют адрес канала ввода-вывода (табл. 3.2).
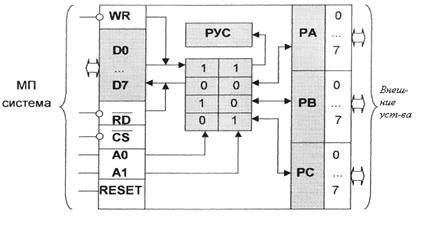
Рисунок 3.9. Структура БИС КР580ВВ55
Таблица 3.2 - Назначение сигналов БИС КР580ВВ55
|
Назначение |
Наименование |
Примечание |
|
CS |
Выбор микросхемы |
При CS=0 – разре-шение работы БИС. При CS=1- D0-D7 в третьем состоянии |
|
RD |
Чтение |
Чтение данных с БИС на шину данных |
|
WR |
Запись |
Запись данных на БИС |
|
RESET |
Сброс |
При RESET=1 – все регистры обнуляют-ся и все каналы переводятся в режим ввода |
|
А1, А0 |
Адреса канала |
00 DO-D7 ¬®PA 10 DO-D7 ¬®PB 01 DO-D7 ¬®PC 11 DO-D7 ¬®PУС |
Перед началом работы или в процессе работы (при необходимости изменения режимов работы каналов) программным способом в БИС заносятся специальные команды инициализации, изменяющие режимы работы БИС, т.е. осуществляется занесение их в регистр управляющего слова (РУС). Структура управляющего слова приведена на рис. 3.10.
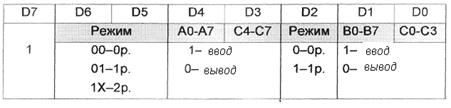
Рисунок 3.10. Структура управляющего слова
Содержимое этого слова задается одним из трех возможных режимов работы каналов ввода-вывода:
- режим 0 - основной;
- режим 1 - стробирующий однонаправленный;
- режим 2 - стробирующий двунаправленный.
Управляющее слово засылается командой OUT из аккумулятора МП в РУС.
Режим 0
В этом режиме по сигналу, который подается на вход RD/WR, данные читаются / записываются из периферии / в периферию через канал, который выбирается с помощью сигналов на входах АО, А1. Информация сохраняется на выходе канала до записи новой информации в данный канал.
Режим 1
В этом режиме осуществляется асинхронный обмен информацией между портом и периферией через каналы РА и РВ. Канал PC используется для передачи управляющих сигналов.
Режим 2
В этом режиме БИС имеет один двунаправленный канал РА, а пять разрядов канала PC используются как управляющие.
Рассмотрим, как осуществляется подключение БИС KP580BB55 к шинам МП и внешним устройствам.
На рис. 3.11 приведена схема включения БИС для возбуждения светодиодов и ввода информации посредством интегральных ключей. Это типичный пример электрической схемы для понимания основных принципов использования БИС и решения сложных проблем организации интерфейса.
Для выбора устройства используются адресные линии А7..А2. В примере адрес порта -FO. Если на адресных линиях А7 - А4 установлена логическая 1, а разряды адреса A3 и А2 равны логическому 0, то это соответствует режиму выбора микросхемы. Адресные выходы А1 и АО микропроцессора соединяются непосредственно со входами А1 и АО БИС. Логическая комбинация сигналов на этих входах определяет внутренний порт, с которым осуществляется связь: PA, PB, PC, РУС. Выводы системной шины данных МП соединяются непосредственно со входами D0-D7 БИС (двунаправленное буферирование шины данных не используется).
Активный уровень сигнала RESET (логическая 1) устанавливает БИС в начальное состояние, при котором все каналы переводятся в режим ввода, а регистры переводятся в состояние логического 0.
Выводы микросхемы PAО, PA1, РА2, РСО и РС1 соединяются со светодиодами. Если на указанных выше выводах устанавливается сигнал низкого уровня путем записи логического 0, то это передается через разряды шины данных в канал РА или PC и соответствующие светодиоды включаются. Канал РВ соединен с электронными ключами, на основе которых строятся логические элементы (ЛЭ). Таким образом, БИС имеет следующую конфигурацию: каналы РА и PC настроены на вывод, а РВ - на ввод информации.
Программа управления БИС должна выполнять простые задачи:
- запись управляющего слова для задания конфигурации БИС;
- введение управляющего слова в канал РВ;
- запись слова в канал РА;
- вывод управляющего слова из канала РВ;
- запись слова в канал PC.
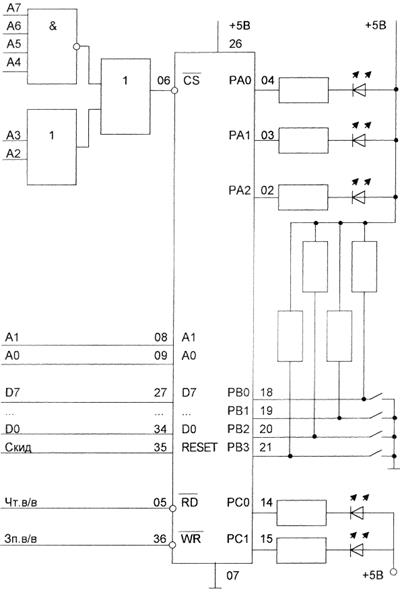
Рисунок 3.11. Схема включения БИС
Согласно формату управляющего слова (рис. 3.10) для решения любой задачи необходимая конфигурации БИС может быть представлена рис. 3.12.
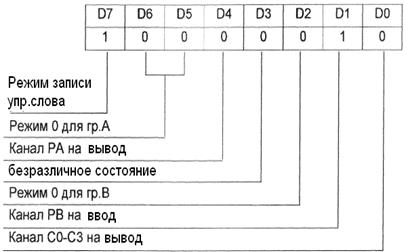
Рисунок 3.12. Управляющее слово БИС
Так как адрес БИС - FO, то адреса внутренних каналов имеют обозначения: PA = FO; PB = F1; PC = F2; PYC = F3. Программа инициализации БИС и обслуживания периферийных устройств на Ассемблере для МП580 имеет вид
MVI А, 82Н
OUT OF3H ; запись управляющего слова
BACK: IN OF1Н ; введение слова из канала РВ
OUT OFOH ; вывод слова в канал РА
СМА ; дополнение слова из канала РВ
OUT OF2H ; вывод слова в канал PC
JMP BACK ; возвращение к началу цикла
Изменить конфигурацию БИС можно с помощью записи нового управляющего слова в канал управления.
3.3. Организация последовательного интерфейса
Последовательный интерфейс характеризуется тем, что передача информации происходит по одной линии связи, причем биты, которые составляют слово, передаются один за одним. Обычная скорость передачи данных составляет:
- 110 и 300 бит/с для телетайпа;
- 1200; 2400; 4800; 9600 бит/с - для ЭВМ.
Рассмотрим, как осуществляется прием и распознавание данных, которые передаются. Предположим, что передается комбинация 10110001.
В начале сеанса передаётся младший разряд DO. Предположим, что линия связи при отсутствии передачи находилась в состоянии логической 1. Если младшие разряды D0 и D1 равны 1, то момент начала передачи данных будет пропущен. Поэтому к слову, которое передается, прибавляются стартовые биты, которые информируют принимающее устройство о начале передачи. Состояние стартового бита противоположно состоянию линии в режиме ожидания.
Кроме стартового бита к информации, которая передается кодовой комбинацией, прибавляются:
- бит паритета контроля правильности приема;
- стоповый бит для обозначения окончания передачи.
Полное цифровое слово представлено на рис. 3.13.
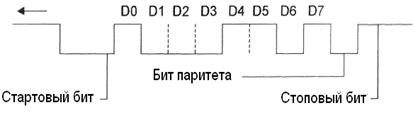
Рисунок 3.13. Передача цифрового слова
Для организации последовательных линий связи разработана специальная интегральная микросхема КР580ВВ51, её полное название универсальный синхронно-асинхронный приемо-передатчик (УСАПП).
Структурная схема КР580ВВ51 приведена на рис. 3.14.
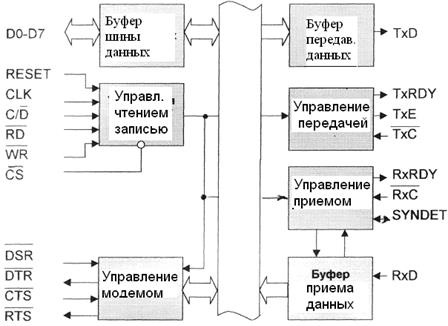
Рисунок 3.14. Структура БИС КР580ВВ51
![]() - управление/данные. Если сигнал равен 1, то записывается управляющее слово или словосостояние, если -0, то записываются или читаются данные.
- управление/данные. Если сигнал равен 1, то записывается управляющее слово или словосостояние, если -0, то записываются или читаются данные.
![]() - вх. готовность модема.
- вх. готовность модема.
![]() - вых. готовность приёма информации.
- вых. готовность приёма информации.
![]() - вх. разрешение передачи информации.
- вх. разрешение передачи информации.
![]() - вых. готовность передачи информации.
- вых. готовность передачи информации.
TxD - вых. линия микросхемы.
TxRDY - готовность блока к записи кода по шине данных.
ТхE - окончание выдачи кода из регистра блока при «1»; запись кода в блок регистра при «0».
![]() - синхронизация блока передачи.
- синхронизация блока передачи.
RxRDY - вых. готовность блока к чтению кода по шине данных.
![]() - синхронизация блока приема.
- синхронизация блока приема.
SYNDET - вых./вх.
RxD – входная линия микросхемы.
Процесс программирования БИС приведен на рис. 3.15.
При синхронной передаче существует общая линия синхросигналов для источника и приемника, импульсы служат для выделения бит в канале.
При асинхронной передаче источник отмечает начало и конец слова. Формат управляющего слова инициализации при асинхронно-синхронном и синхронном режимах обмена данными приведен на рис. 3.16.
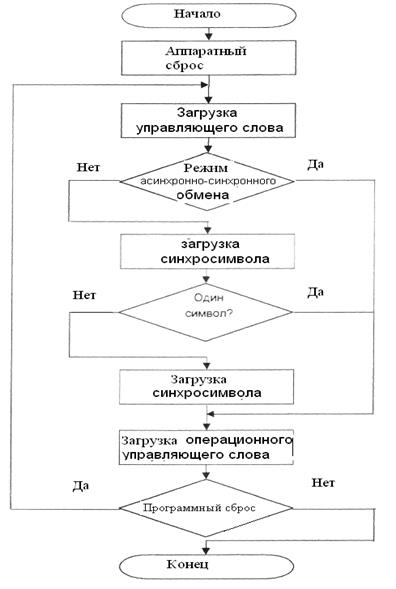
Рисунок 3.15. Алгоритм программирования БИС
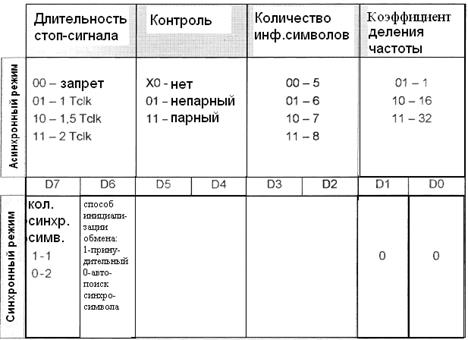
Рисунок 3.16. Формат управляющего слова
После загрузки управляющего слова загружается операцион-ное слово (рис. 3.17).
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
|
1-поиск синхро-симво-ла |
1-прог-рам- мный сброс |
1- готов-ность переда-чи |
1- сброс флагов ошибки
|
1- раз-рыв послед. ходов- пауз |
1- прием разре-шен |
1- готов. к приё- му |
1- пере- дача разре-шена |
Рис 3.17. Формат операционного слова
Пример программы УСАПП в асинхронно-синхронном режиме (режиме асинхронного обмена с дуплексным каналом связи, восемь информационных разрядов, бит контроля по парности, два стоп-бита, коэффициент деления частоты равняется 16):
DI
XRA
OUT ADDR1
OUT ADDR1
OUT ADDR1
MVI А, 40Н
OUT ADDR1; программный сброс
MVI A, OFEH ; /11111110 – управляющее слово /
OUT ADDR1
MVI A, 15H ; / 00010101 - операционное слово /
OUT ADDR1
El
RET
Пример программы УСАПП в синхронном режиме (режим синхронного приема с автопоиском синхросимвола, восемь информационных разрядов, контроль по парности, синхросимвол 10000000):
DI
XRA
OUT ADDR1
OUT ADDR1
OUT ADDR1
MVI A, 40H
OUT ADDR1; программный сброс
MVI F, OBCH ; /10111100 - управляющее слово /
OUT ADDR1
MVI A, 80H; загрузка синхросимвола
OUT ADDR1
MVI A, 94H; /10010100 - операционное слово /
OUT ADDR1
EI
RET
Схема включения УСАПП в асинхронно-синхронном режиме приведена на рис. 3.18.
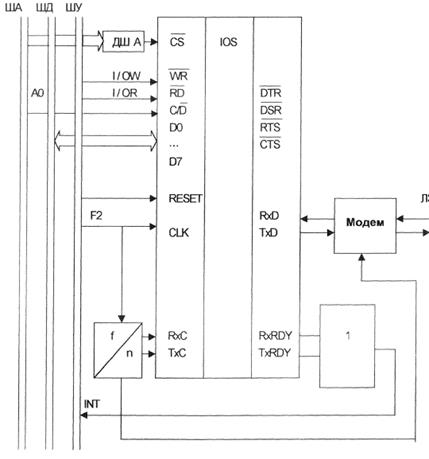
Рисунок 3.18. Схема включения БИС КР58ВВ51
3.4. БИС задания времени (таймер)
Для выполнения функций задания времени и получения программно-управляющих временных задержек в МП системах используются БИС КР580ВИ53, которые представляют собой трёхканальное программируемое устройство. БИС задания времени называют «таймер». Условное обозначение БИС приведено на рис. 3.19.
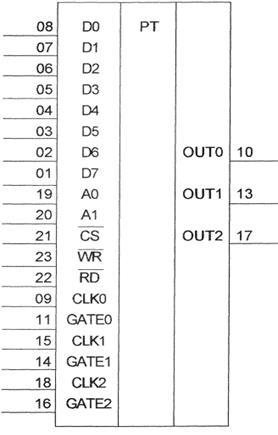
Рисунок 3.19. Структура БИС КР580ВИ53
В состав таймера входят: буфер шины данных, три канала, которые содержат в каждом канале регистр управляющего слова, схема управления каналом, буфер, 116-разрядный счетчик, работающий на вычитание.
Каждый из трех каналов программируется отдельно путем записи в регистр управляющего слова (рис.3.20).

Рисунок 3.20. Формат управляющего слова
Назначение входов:
CLK - вх. синхронизации счетчиков;
GATE - вх. управления счетчиками;
OUT - вых. сигналы счетчиков.
В зависимости от комбинаций управляющих сигналов на входах ![]() ,
, ![]() ,
, ![]() разнообразные устройства таймера подключаются к шине данных при различных сочетаниях А0 и А1.
разнообразные устройства таймера подключаются к шине данных при различных сочетаниях А0 и А1.
А0А1
0 0 - D 7-D0 -> счт.0
0 1 - D 7-D0 -> счт.1
1 0 - D 7-D0 -> счт.2
1 1 - D 7-D0 -> РУС
Управляющее слово посылается с МП по шине данных командой OUT. При этом на А0 и А1 должны быть установлены сигналы высокого уровня. Запись управляющих слов для разнообразных счетчиков можно осуществлять в любой последовательности. Вслед за управляющим словом с помощью команды OUT в счетчик таймера заносят начальное содержимое 1 или 2 байта.
Каждый из счетчиков может работать в одном из 6 режимов:
0 - программируемая задержка;
1 - программируемый ждущий мультивибратор;
2 - программируемый генератор тактовых сигналов;
3 - генератор прямоугольных сигналов;
4 - строб, который управляется программно;
5 - строб, который управляется аппаратно.
Временные диаграммы работы таймера в разных режимах приведены на рис. 3.21.
Режим 0
С момента записи числа в счетчик до окончания счета на выходе OUT сохраняется сигнал низкого уровня. После окончания счета уровень сигнала на выходе становится высоким и сохраняется до следующей загрузки счетчика. Счет возможен только при высоком уровне сигнала GATE.
Режим 1
На выходе счетчика формируется отрицательный импульс продолжительностью Tclk, причем низкий уровень на выходе устанавливается со второго такта синхросерии после поступления на вход GATE сигнала высокого уровня. Особенностью данного режима является возможность перезапуска счетчика без перезагрузки, которая необходима в режиме 0.
Режим 2
На выходе OUT каждый раз после пересчета числа, записанного в счетчик, при к=0 появляется отрицательный импульс продолжительностью в один период тактовой частоты.
Режим 3
Если n - парное, то продолжительность отри-цательных и положительных полупериодов на выходе OUT равны между собой. Если n - непарное, отрицательный полу-период исходного сигнала меньше положительного на Tclk. При n = 3 загрузка невозможна.
Режим 4
На выходе OUT появляется отрицательный импульс продолжительностью Tclk при окончании счета.
Режим 5
Отличается от режима 4 тем, что счетчик можно перезапускать.
Режимы работы таймера можно условно разбить на 3 группы:
- программируемый одновибратор (0-1);
- делитель частоты (2, 3);
- счетчик событий (4, 5).
Считывание содержимого счетчика можно осуществить двумя способами:
- с остановкой;
- без остановки.
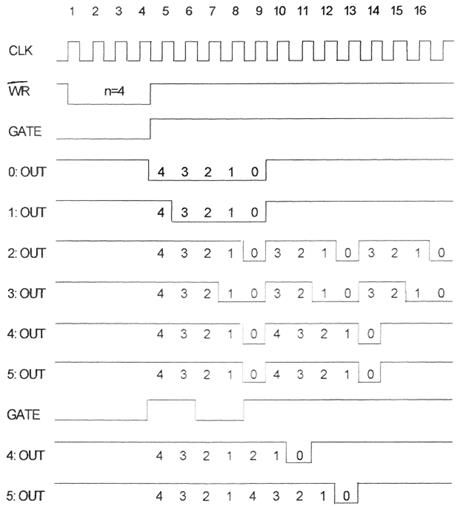
Рисунок 3.21. Режимы работы БИС
При первом способе чтение данных осуществляется командой IN после приостановки работы счетчика путем снятия сигнала GATE или блокированием тактовых сигналов.
При втором способе чтение данных осуществляется после загрузки командой OUT управляющего слова с нулями в D5 и D4, разряды D3-D0 не имеют значения. После загрузки управляющего слова содержимое читается командой IN.
Пример. Счетчики таймера могут использоваться в системе как счетчики событий, причем снятие сигнала GATE не вызывает прекращение работы счетчиков. По положительному фронту этого сигнала должна осуществиться перезагрузка счетчика. Таймер имеет адрес F0.
Программа инициализации таймера
MVI А, 1АН; запись управляющего слова
OUT OF3H ; в счетчик 0
MVI A, 5AH ;
OUT OF3H ; в счетчик 1
MVI A, 9AH ;
OUT OF3H ; в счетчик 2
MVI А, ОАН ; загрузка числа в счетчик О
OUT OFOH ;-/10/
MVI A, 64H ; загрузка числа в счетчик 1
OUT OF1H ;-/100/
MVI A, 80H ; загрузка числа в счетчик 2
OUT OF2H ;-/128/
Реализация часов реального времени приведена на рис. 3.22.
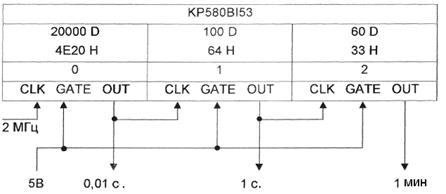
Рисунок 3.22. Часы реального времени
3.5. Организация режима прерывания
При функционировании систем управления и измерительных приборов необходимо осуществлять прерывание основной программы работы и выполнять те или иные технические действия путем выдачи соответствующих управляющих сигналов. Сигнал прекращения действия основной программы и переход к подпрограмме обслуживания прерываний называют запросом на прерывание или запросом на обслуживание. В реальных системах существуют несколько источников запроса прерывания. Если известно, что сигналы запроса поступают в разные моменты времени, то идентификация источника, переход к нужной подпрограмме и возвращение к исходной программе не представляют технических трудностей. В общем случае источники вырабатывают свои запросы на прерывания независимо друг от друга. Они могут пересекаться во времени, поэтому для установления порядка обслуживания запросов каждому из источников присваивается свой номер согласно его информационной важности, который называют уровнем приоритета. Устройство, на которое возлагаются задачи распознавания запросов и выдача соответствующих управляющих сигналов, обеспечивающих выполнение подпрограммы обслуживания, называют блоком приоритетных прерываний.
Для реализации прерываний в системах автоматики разработан программируемый контроллер приоритетных прерываний (ПКПП) КР580ВН59 (рис 3.23).
В состав БИС входят: 8 разрядный буфер данных; схема управления чтением/записью - входы CS, WR, RD, АО; регистры управляющих слов; схемы управления - вход INTA, выход INT; схема каскадирования - вход SP, входы/выходы CASQ-CAS2; регистр запросов на прерывание - входы IRQ 0-IRQ7.
Программируемый контроллер прерывания может находиться в состояниях отладки и обслуживания запросов на обмен. Используются управляющие слова двух видов: инициализации (ICW) в режиме отладки и операционные (OCW) при обслуживании запросов. Командами OUT контроллер настраивается на разнообразные режимы: полного вложения подпрограмм прерывания (приоритеты внешних устройств фиксированные); циклического сдвига приоритетов; специальной маскировки; последовательного опроса.
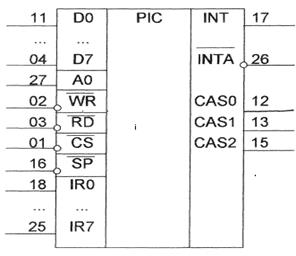
Рисунок 3.23. Условное обозначение ПКПП
ПКПП обслуживает запросы на прерывание от восьми внешних устройств, которые поступают на входы IRQ0-IRQ7. Схема управления ПКПП формирует сигнал запроса на прерывание INT. Если микропроцессору разрешены прерывания, он отвечает контроллеру сигналом INTA. По этому сигналу на шину данных выставляется первый байт команды CALL. После чего за двумя очередными сигналами, которые поступают на вход INTA, выдается второй и третий байты команды CALL, содержащие адрес подпрограммы обработки прерываний. Отладка ПКПП проходит в соответствии с алгоритмом, приведенным на рис. 3.24.
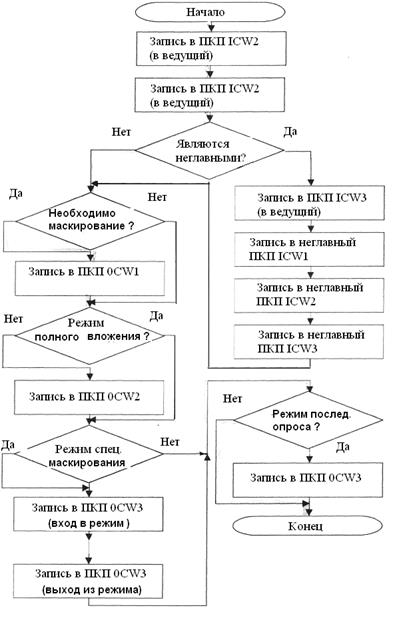
Рисунок 3.24. Алгоритм настройки ПКПП
Рассмотрим алгоритм отладки ПКПП.
По адресу А0 = 0 командой OUT загружается управляющее слово инициализации ICW1, с помощью которого задается младший байт адреса подпрограммы прерываний и наличие каскадирования. Формат управляющего слова ICW1 приведен на рис. 3.25. После этого загружается второе управляющее слово инициализации ICW2 и таким образом задается старший байт адреса (рис. 3.26).
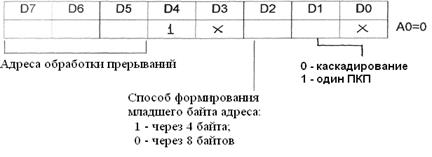
Рисунок 3.25. Формат управляющего слова ICW1
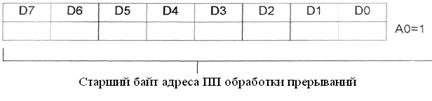
Рисунок 3.26. Формат управляющего слова ICW2
После загрузки управляющих слов инициализации ПКПП переходит в состояние обслуживания запросов на прерывание, затем в режим полного вложения подпрограмм обработки прерываний. Некоторые из выходов запросов на прерывание могут быть замаскированы. Для этого по адресу А0 =1 в ПКПП засылается OCWI - байт с единицами в разрядах, соответствующий входам, по которым запросы не должны обслуживаться. В качестве примера рассмотрим режим полного вложения подпрограмм обработки прерываний. В этом режиме приоритеты входов никогда не изменяются, они установлены таким образом, что IR0 имеет высший, а IR7- низший приоритеты. Если одновременно поступают запросы на несколько входов ПКПП, то обслуживается запрос, который поступил на вход с наибольшим приоритетом. После выполнения подпрограммы обслуживания прерываний загрузка OCW2 (рис. 3.27) регистра состояния сбрасывается и продолжается выполнение прерванной программы.
![]()
Рисунок 3.27. Завершение обслуживания запроса прерывания – переход в режим полного вложения
Пример отладки ПКПП в режиме полного вложения и фрагмент подпрограммы обслуживания прерываний имеет вид:
ПП отладка ПКПП ПП обработки прерываний
MVI А, 16 DI ; запрет прерываний
OUT F0:-ICW1
MVI A, 83 MVI А,20
OUT F1: - ICW2 OUT F0 ; обработка конца прерываний
MVI A, F0 El ; разрешение прерывания
OUT F0: - OCW1 RET ; возвращение
HIT
В подпрограммах адрес ПКПП - F0, прерывания R 7-IR4 замаскированы, т.е. не обслуживаются. Необходимо еще раз подчеркнуть, что любую подпрограмму обработки прерывания необходимо завершать загрузкой операционного слова OCW2.
3.6. Элементы защиты информации
Прохождение электрических сигналов по цепям технических средств (персонального компьютера, телефонного аппарата, факса и т.п.) и по соединительным кабелям сопровождается возникновением побочных электромагнитных излучений в окружающей среде, которые создают условия для повреждения оборудования вследствие взаимных наводок. Для устранения этих нежелательных явлений применяются специальные средства защиты информации: экранирование, фильтрация, заземление, электромагнитное зашумление. Используются также средства ослабления уровней нежелательных электромагнитных излучений и наводок с помощью разнообразных резистивных и поглощающих согласующих нагрузок.
Наиболее радикальным способом защиты аппаратуры и помещений от излучения является экранирование, которое можно выполнить из листовой стали, медной сетки или алюминиевой фольги. Желательно также иметь экранирование внутренних схем аппаратуры.
Серьезную проблему представляет защита линии связи. Наиболее экономичным способом экранирования является расположение информационных линий в экранируемых распределительных коробах. Несколько иначе приходится экранировать отдельные линии связи. Для этого используются провода в экранированной обмотке или помещают их в оболочку, например, фольгу. Эффективно применять при этом скручивание двух или трех проводов. При использовании трифиля третий провод соединяется с землей и служит экраном. Более эффективным является триаксиальный (экранированный коаксиальный) кабель. Необходимо проследить за тем, чтобы кабели разных линий связи были максимально разнесены для уменьшения взаимных наводок.
После проведения работ по экранированию необходимо выполнить работы по заземлению экранов. Это осуществляется путем параллельного подключения к существующему контуру заземления, при этом необходимо проверить его сопротивление (оно должно быть не более 4 Ом). Сопротивление заземления рассчитывается по формулам:
для металлической пластины радиусом ![]() , расположенной непосредственно у поверхности земли,
, расположенной непосредственно у поверхности земли,
![]() ,
,
где ![]() - удельное сопротивление грунта, Ом / см3;
- удельное сопротивление грунта, Ом / см3;
для вертикально вбитой трубы,
![]() ,
,
где ![]() - длина трубы, см;
- длина трубы, см;
![]() - радиус трубы, см.
- радиус трубы, см.
Исключается возможность утечки информации по цепям источников питания, если использовать сетевые фильтры, включая их между энергетической сетью и устройством потребителя. Для подавления помех в сетевых фильтрах используют два способа: фильтрация режекторными дросселями, а также экранирование сетевой и выходной обмоток трансформаторов.
Среди электронных устройств защиты информации наибольшее распространение получили генераторы шума. Они излучают активную широкополосную радиопомеху, которая влияет на входные цепи радиоприемных устройств. Аналогичные устройства используются для защиты от утечки информации по электрическим сетям и телефонным линиям.
Первые генераторы шума состояли из двух мультивибраторов, выполненных на транзисторах. Фильтрация подобных сигналов не представляет особых трудностей, поэтому используются многочастотные помехи, которые увеличивают вероятность подавления полезной информации. Необходимо применение нескольких точно налаженных фильтров в зависимости от количества использованных частот. И чем большее количество частот в помехе, тем сложнее выявить необходимую информацию. На рис. 3.28 приведена схема многочастотного генератора шума.
Практически, это RC - мультивибратор на элементах DD3.1., DD3.2., частота которого регулируется включением дополнительных резисторов R2 - R9 параллельно основному- R1. Переключение резисторов обеспечивает мультиплексор DD1 в соответствии с двоичным кодом, который поступает со счетчика DD2. Продолжительность каждого такта и скорость изменения тактов определяются быстродействием мультиплексора и частотой тактового генератора на элементах DD3.4., DD3.5., импульсы из которого поступают на вход счетчика DD2. Скорость изменения тактов может регулироваться резистором R11.
Для защиты от несанкционированного подключения к телефонной сети используются устройства кодирования линии, которые сохраняют линию "за собой". При этом все посылки вызова, которые поступают от АТС, проходят беспрепятственно, а для подключения линии необходимо подать индивидуальный код.
Схема устройства кодирования приведена на рис. 3.29.
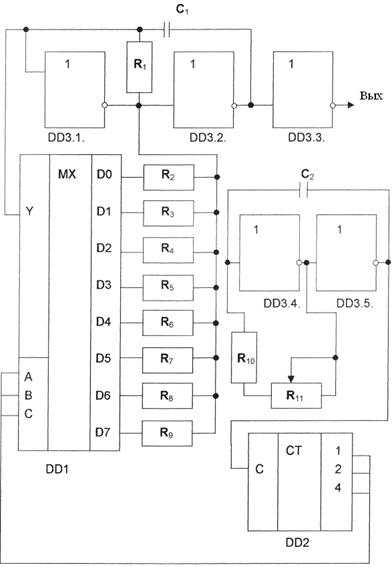
Рисунок 3.28. Многочастотный генератор
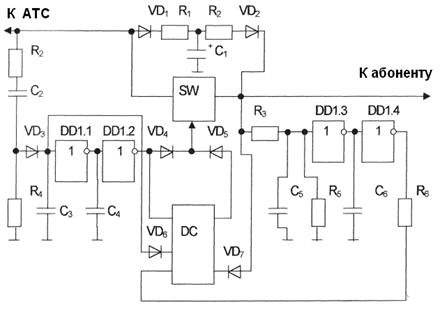
Рисунок 3.29. Схема устройства кодирования линии
Устройство реализовано на интегральных микросхемах серии 561 с микропотреблением в статическом режиме. В состав устройства входят:
- узел обработки импульсов вызова на элементах DD1.1., DD1.2.;
- узел приема кода на элементах DD1.3., DD1.4.;
- включатель абонента SW;
- дешифратор кода DC;
- узел питания на элементах VD1, R1, VD2, R2, С1.
Рассмотрим работу схемы. При снятии трубки с телефона будет отсутствовать сигнал готовности станции (425 Гц). После набора соответствующего кода и обработки его узлом приема на выходе дешифратора появится уровень логической единицы "1", который через включатель абонента SW подключит телефон к линии (если код набран правильно). Если код набран неправильно, система защиты блокируется на определенное время (десятки секунд), после чего можно повторить набор кода.
При включении ключа SW телефон работает в обычном режиме - обеспечивает набор номера и связь. Система снова входит в режим охраны после того, как трубка будет положена на аппарат.
Любой сигнал от АТС после обработки элементами DD1.1., DD1.2. с небольшой задержкой, которая определяется параметрами элементов С3, С4 с уровнями логической "1" через диод VD4 откроет ключ только на время вызова. При снятии трубки с телефонного аппарата входной узел замыкается через диод VD6, и дальше для подключения телефона необходимо снова набрать индивидуальный код.
Таким образом, система защиты блокирует подключение к телефонной линии без знания кода.
Список литературы
1. Мячев А.А., Степанов В.Н., Щербо В.К. Интерфейсы систем обработки данных: Справочник. - М.:Радио и связь, 1989.
2. Микропроцессоры /Под. ред. Л.Н. Преснухина М.:Высшая школа 1986, т.2.
3. Самофалов К.Г. и др.: Микропроцессоры. - Киев: Техника, 1986.
4. Шпионские штучки и устройства для защиты обьектов и информации: Справочное пособие: г. Лань, 1998.
4. Синтез систем логического управления
Среди разновидностей систем управления важное место занимают системы логического управления (СЛУ). Характерным признаком этих систем является применение двоичных датчиков и исполнительных механизмов в виде источников входных и приемников выходных сигналов. При проектировании СЛУ широко используются микросхемы типа СИС и БИС, которые позволяют решать сложные функции и алгоритмы аппаратным (схемотехническим) путем. К числу таких микросхем относятся: арифметико-логические, расчетные и триггерные устройства, регистры, сумматоры, умножители, мультиплексоры, шифраторы, компараторы и др. Менее известны на практике проектирования мультиплексоры (MX), представляющие собой логическое устройство, которое содержит g- управляющих входов U1, U2,..., Ug; 2g - информационных входов D0, D1, D2; стробирующий вход и выход. При подаче на управляющие входы комбинации двоичных сигналов и соответствующего сигнала на вход стробирования к выходу Y мультиплексора подключается тот информационный вход, порядковый номер которого отвечает весу двоичной комбинации управляющих сигналов. Построение логических схем на мультиплексорах проводится в виде структур, которые отличаются способами функционального распределения и разложения булевых функций (БФ). Наиболее часто на практике применяется разложение БФ по способу Шеннона:
![]() ,
,
где ![]() - остаточные функции разложения, которые получаются из функции
- остаточные функции разложения, которые получаются из функции ![]() путем подстановки констант 0 и 1 вместо сменных переменных множества
путем подстановки констант 0 и 1 вместо сменных переменных множества ![]() . После проведения этой операции получим:
. После проведения этой операции получим:
для ![]() имеем
имеем ![]()
для ![]() имеем
имеем ![]()
для ![]() l имеем
l имеем ![]()
Например, булева функция имеет вид
![]()
![]()
Для компактности записи заданной булевой функции используется десятичная форма записи с обозначением отдельных конъюнкций и представляет-ся в виде множества ![]() :
:
![]() .
.
С учетом специфики работы мультиплексоров и конструктивных особенностей их реализации с числом управляющих входов g = 2,3,4 и информационных входов 2g = 4,8,16 разложение заданной БФ можно осуществить по двум, трем или четырём переменным. Тогда при построении логической схемы на мультиплексорах переменные должны подключаться к управляющим входам, а остаточные функции (ОФ) разложения - к информационным входам соответ-ствующего MX. Если образованные в результате первого шага ОФ имеют нетривиальный вид, то процедура разложения каждой из них должна повторяться до момента тривиального вида, а именно:
![]() 0 (отсутствующая).
0 (отсутствующая).
Остаточные функции разложения Qt по последним двум ![]() , трем
, трем ![]() , четырем
, четырем ![]() переменным с булевой функцией
переменным с булевой функцией ![]() могут быть вычислены по формулам:
могут быть вычислены по формулам:

где t = 0,1,...,2 g-1;
![]() - целая часть от деления
- целая часть от деления ![]() ;
;
![]() - остаток от деления
- остаток от деления ![]() ;
;
![]() - множество терминов БФ;
- множество терминов БФ;
g - число переменных, на которые раскладывается БФ.
При построении логической схемы на MX, которые реализуют заданную БФ, возможны два случая:
a) n <= g;
б) n => g
В первом случае БФ реализуется схемой, состоящей из одного мультиплексора, в которой g переменных ![]() подключаются к управляющим входам MX, а на информационные входы подаются константы 0 или 1.
подключаются к управляющим входам MX, а на информационные входы подаются константы 0 или 1.
Во втором случае процесс построения логической схемы проводится по результатам разложения заданной БФ. Вследствие первого шага разложения исходной БФ ![]() по g переменным получаем совокупность ОФ, которая зависит только от n-g переменных. Следующие шаги разложения уменьшают каждый раз число переменных ОФ на g, вплоть до получения в процессе разложения ОФ тривиального вида. Таким образом, число шагов разложения БФ отвечает числу каскадов схемы на мультиплексорах с подключением на управляющие входы MX тех переменных, по которым осуществлялось разложение; на информационные входы MX последнего каскада подаются отдельные переменные
по g переменным получаем совокупность ОФ, которая зависит только от n-g переменных. Следующие шаги разложения уменьшают каждый раз число переменных ОФ на g, вплоть до получения в процессе разложения ОФ тривиального вида. Таким образом, число шагов разложения БФ отвечает числу каскадов схемы на мультиплексорах с подключением на управляющие входы MX тех переменных, по которым осуществлялось разложение; на информационные входы MX последнего каскада подаются отдельные переменные ![]() или
или ![]() , а также сигналы логического 0 или логической 1, исходя из вида полученных ОФ:
, а также сигналы логического 0 или логической 1, исходя из вида полученных ОФ:
![]() Ǿ
Ǿ![]()
Согласно приведенному выше алгоритму осуществим разложение заданной БФ по двум, трем и четырем переменным, сводя результаты расчетов в таблицы. Вариант разложения БФ по двум переменным![]() приведен в табл. 4.1.
приведен в табл. 4.1.
Таблица 4.1 – Результаты разложения БФ по двум переменным
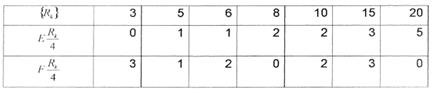
Таким образом, на первом шаге разложения БФ получаем следующие ОФ:
![]()
![]()
![]()
![]()
Разложение БФ продолжим, так как не все ОФ имеют тривиальный вид.
На втором шаге рассматривается каждая из полученных на первом шаге разложения остаточных функций Qt (табл. 4.2).
Таблица 4.2 – Результаты разложения остаточных функций Qt
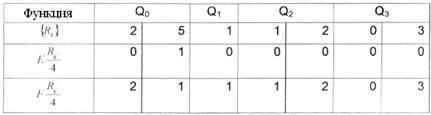
На втором шаге разложения БФ имеем следующую ОФ:
для
Ǿ,


для
Ǿ,

Ǿ,
Ǿ;
для
Ǿ,
для
Ǿ,
Так как ОФ, полученные на втором шаге разложения, являются тривиальными, проверим это практической реализацией построением двухкаскадной схемы на MX с g = 2. Схемная реализация БФ на MX типа К1533КП2 приведена на рис. 4.1. Вариант разложения БФ по трем переменным приведен в табл. 4.3.
Таблица 4.3 – Результаты разложения БФ по трем переменным
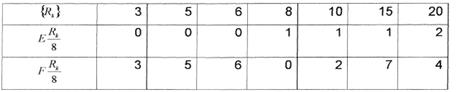
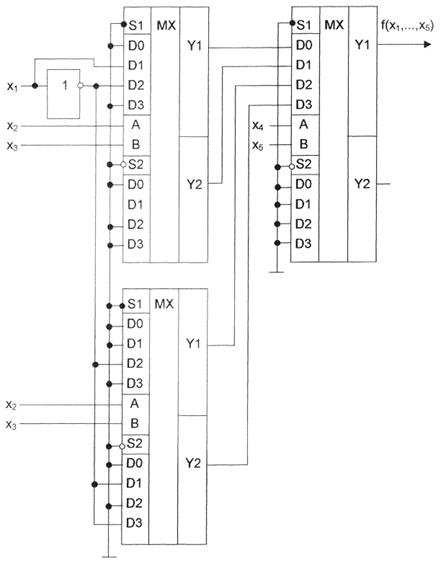
Рисунок 4.1. Реализация заданной БФ на мульти-плексорах типа К1533КП2
Таким образом, после первого разложения по трем переменным получены следующие ОФ:
![]()
![]() Ǿ,
Ǿ, ![]()
![]()
![]()
![]()
![]()
![]()
Поскольку одну часть ОФ получили тривиальной (Q0 - Q1, Q5 - Q7), a другую (Q4) - нетривиальной, что свидетельствует о нецелесообразности дальнейшего разложения БФ и ее схемной реализации (для окончательной реализации БФ при таком подходе нужно иметь восемь мультиплексоров).
Вариант разложения БФ по четырем переменным ![]() приведен в табл. 4.4.
приведен в табл. 4.4.
Таблица 4.4. Результаты разложения БФ по четырем переменным

Таким образом, после первого шага разложения БФ по четырем переменным получены следующие ОФ:
Q0=Q1=Q2=Q7=Q9=Q12=Q13=Q14=Ǿ, Q3=Q5=Q6=Q8=Q10=Q15= Ǿ,
Q0=1.
Поскольку все ОФ тривиальные, разложение БФ заканчиваем и ее можно реализовать на одном MX при g=4. Схемная реализация заданной БФ на одном мультиплексоре типа К155КП1 приведена на рис. 4.2.
Для реализации на мультиплексорах лучше всего подходят БФ с числом переменных конъюнкций до 9.
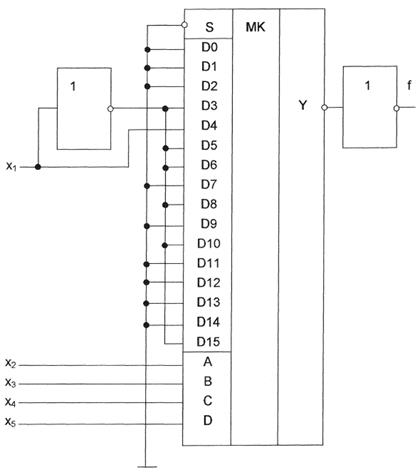
Рисунок 4.2. Реализация заданной БФ на мульти-плексоре типа К155КП1
Список литературы
1. Арсеньев Ю.Н., Журавлев В.М. Проектирование систем логического управления на микропроцессорных средствах. -М.: Высшая школа, 1991.
2. Закревский А.Д. Логический синтез каскадных схем. -М., 1981.
3. Юдицкий С.А., Тагаевская А.А., Ефремова Г.К. Проектирование дискретных систем автоматики. - М.: Высшая школа, 1980.