4.5.1. Сигналы с дискретной амплитудной модуляцией
Рассмотренные выше сигналы с непрерывной модуляцией, в основном используются в системах радиовещания, радиотелефонии, телевидения и других. Вместе с тем, переход на цифровые технологии в радиотехнике, в том числе и в перечисленных областях, обусловил широкое использование сигналов с дискретной модуляцией или манипуляцией. Так как исторически сигналы дискретной модуляции впервые были использованы для передачи телеграфных сообщений, такие сигналы ещё называют сигналами амплитудной (АТ), частотной (ЧТ), и фазовой (ФТ) телеграфии. Ниже при описании соответствующих сигналов будет использована эта аббревиатура, что позволит отличать их от сигналов с непрерывной модуляцией.
4.5.1. Сигналы с дискретной амплитудной модуляцией
Сигналы дискретной амплитудной модуляции характеризуются тем, что амплитуда несущего колебания изменяется в соответствии с управляющим сигналом, который представляет собой последовательности импульсов, обычно прямоугольной формы. При исследовании характеристик сигналов с непрерывной модуляцией в качестве управляющего сигнала ![]() рассматривался гармонический сигнал. По аналогии с этим для сигналов с дискретной модуляцией в качестве управляющего сигнала используем периодическую последовательность прямоугольных импульсов
рассматривался гармонический сигнал. По аналогии с этим для сигналов с дискретной модуляцией в качестве управляющего сигнала используем периодическую последовательность прямоугольных импульсов
Очевидно, как следует из (4.39), длительность импульса составляет ![]() , а скважность
, а скважность ![]() .
.
На рис. 4.10 представлены эпюры управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и амплитудно-манипулированного сигнала
и амплитудно-манипулированного сигнала ![]() . Здесь и далее будем полагать амплитуду импульсов управляющего сигнала
. Здесь и далее будем полагать амплитуду импульсов управляющего сигнала ![]() равной
равной ![]() , а начальную фазу несущего колебания
, а начальную фазу несущего колебания ![]() . Тогда сигнал с дискретной амплитудной модуляцией можно записать следующим образом
. Тогда сигнал с дискретной амплитудной модуляцией можно записать следующим образом
![]() (4.40)
(4.40)
Ранее было получено разложение последовательности прямоугольных импульсов в ряд Фурье (2.13). Для рассматриваемого случая ![]() и
и ![]() выражение (2.13) принимает вид
выражение (2.13) принимает вид
![]() , (4.41)
, (4.41)
где ![]() .
.
Подставляя (4.41) в (4.40) и используя формулу произведения косинусов, получим:

![]() . (4.42)
. (4.42)
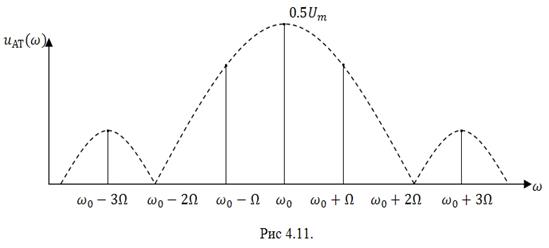
На рис. 4.11 изображён амплитудный спектр сигнала, модулированного по амплитуде последовательностью прямоугольных импульсов. Спектр содержит составляющую несущей частоты с амплитудой ![]() и две боковые полосы каждая из которых состоит из бесконечного числа гармонических составляющих, располагающихся на частотах
и две боковые полосы каждая из которых состоит из бесконечного числа гармонических составляющих, располагающихся на частотах ![]() , амплитуды которых изменяются по закону
, амплитуды которых изменяются по закону ![]() . Боковые полосы, так же как и при непрерывной АМ, расположены зеркально по отношению к спектральной составляющей несущей частоты. Нули амплитудного спектра сигнала АТ соответствуют нулям амплитудного спектра сигнала
. Боковые полосы, так же как и при непрерывной АМ, расположены зеркально по отношению к спектральной составляющей несущей частоты. Нули амплитудного спектра сигнала АТ соответствуют нулям амплитудного спектра сигнала ![]() , но сдвинуты влево и вправо на величину
, но сдвинуты влево и вправо на величину ![]() .
.
Ввиду того, что основная часть энергии ![]() управляющего сигнала сосредоточена в пределах первого лепестка спектра, практическую ширину спектра в рассматриваемом случае, исходя из рис. 4.11, можно определить как
управляющего сигнала сосредоточена в пределах первого лепестка спектра, практическую ширину спектра в рассматриваемом случае, исходя из рис. 4.11, можно определить как
![]() . (4.43)
. (4.43)
Этот результат согласуется с расчётами спектра, приведёнными в [Л.4], где показано, что большая часть мощности сосредоточена в боковых составляющих с частотами ![]() и
и ![]() .
.
4.5.2. Сигналы с дискретной частотной модуляцией
При анализе сигналов с дискретной угловой модуляцией удобно в качестве модулирующего сигнала ![]() использовать периодическую последовательность прямоугольных импульсов вида “меандр”. Тогда управляющий сигнал на интервале времени
использовать периодическую последовательность прямоугольных импульсов вида “меандр”. Тогда управляющий сигнал на интервале времени ![]() принимает значение
принимает значение ![]() , а на интервале времени
, а на интервале времени ![]() - значение
- значение ![]() . Снова, как и при анализе сигналов АТ будем полагать
. Снова, как и при анализе сигналов АТ будем полагать ![]() .
.
Как следует из подраздела 4.3.1 сигнал с частотной модуляцией описывается выражением (4.24). Тогда с учётом того, что на интервале ![]() управляющий сигнал
управляющий сигнал ![]() , а на интервале
, а на интервале ![]() управляющий сигнал
управляющий сигнал ![]() , проведя операцию интегрирования, получим выражение сигнала ЧТ
, проведя операцию интегрирования, получим выражение сигнала ЧТ

На рис 4.12 приведены временные диаграммы управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и сигнала дискретной частотной модуляции
и сигнала дискретной частотной модуляции ![]() .
.
С другой стороны сигнал ЧТ, как это следует из рис. 4.12, может быть представлен суммой двух сигналов дискретной амплитудной модуляции ![]() и
и ![]() , частоты несущих колебаний которых соответственно равны
, частоты несущих колебаний которых соответственно равны
|
|
(4.45) |
а
s1(t) = -1, при ![]() ,
,
s2(t) = 1, при ![]() . (4.46)
. (4.46)
Тогда сигнал с дискретной частотной модуляцией можно представить следующим образом
![]() ,
,
или с учётом (4.40)
|
|
Управляющие сигналы ![]() и
и ![]() представляют собой периодические последовательности прямоугольных импульсов одинаковой амплитуды, длительности и периода следования, но разной полярности. Тогда, в соответствии с (4.46) можно записать
представляют собой периодические последовательности прямоугольных импульсов одинаковой амплитуды, длительности и периода следования, но разной полярности. Тогда, в соответствии с (4.46) можно записать
![]() ;
; ![]()
и выражение (4.47) принимает вид:
![]()
или
![]() , (4.48)
, (4.48)
где ![]() описывается выражением (4.41).
описывается выражением (4.41).
Подстановка (4.41) в (4.48) после преобразований с использованием формулы произведения косинусов даёт
|
|
(4.49) |
На рис. 4.13 изображён амплитудный спектр сигнала дискретной частотной модуляции.
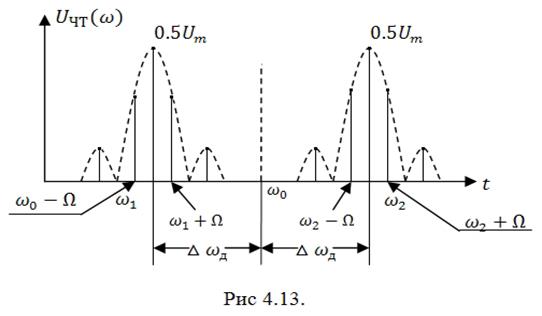
Спектр содержит две боковые полосы, расположенные симметрично относительно частоты ![]() несущего колебания. В свою очередь, каждая из боковых полос состоит из двух боковых подполос, расположенных симметрично относительно частот
несущего колебания. В свою очередь, каждая из боковых полос состоит из двух боковых подполос, расположенных симметрично относительно частот ![]() и
и ![]() . В каждой боковой подполосе располагаются спектральные составляющие на частотах
. В каждой боковой подполосе располагаются спектральные составляющие на частотах ![]() и
и ![]() .
.
Очевидно, как и при непрерывной ЧМ спектр сигналов с дискретной частотной модуляцией гораздо шире спектра сигналов с дискретной амплитудной модуляцией.
Если принять во внимание, что большая часть мощности сосредоточена в боковых составляющих на частотах ![]() и
и ![]() , как указывалось в подразделе 4.41, то практическая ширина спектра в рассматриваемом случае равна
, как указывалось в подразделе 4.41, то практическая ширина спектра в рассматриваемом случае равна
![]() .
.
Если к тому же учесть (4.45), то можно получить
![]() .
.
При ![]() практическая ширина спектра составит
практическая ширина спектра составит
![]() ,
,
или
![]() .
.
Несмотря на значительную ширину спектра сигналы с дискретной частотной модуляцией нашли широкое применение в практической радиотехнике.
4.5.3. Сигналы с дискретной фазовой модуляцией
Выше (подраздел 4.3.1) было установлено, что сигнал с фазовой модуляцией описывается выражением
![]() ,
,
где ![]() - девиация фазы,
- девиация фазы,
![]() - начальная фаза колебания несущей частоты.
- начальная фаза колебания несущей частоты.
Если при формировании сигнала дискретной фазовой модуляции используется периодическая последовательность униполярных прямоугольных импульсов вида (4.38) и (4.39), то выражение для сигнала дискретной фазовой модуляции принимает вид

При использовании “меандра” в качестве управляющего сигнала сигнал дискретной частотной модуляции записывается следующим образом

Очевидно и в том и в другом случае управляющий сигнал принимает два значения на интервале периода следования импульсов. Это означает что в сигнале дискретной фазовой модуляции на этом же интервале начальная фаза принимает два значения, которые определяются величиной ![]() . Обычно, для рассматриваемого случая эти значения отличаются на угол
. Обычно, для рассматриваемого случая эти значения отличаются на угол ![]() . Тогда для сигнала (4.50) величина
. Тогда для сигнала (4.50) величина ![]() , а для сигнала (4.51) величина девиации фазы составит
, а для сигнала (4.51) величина девиации фазы составит ![]() , и выражения (4.50) и (4.51) принимают соответственно следующий вид
, и выражения (4.50) и (4.51) принимают соответственно следующий вид
С точки зрения анализа и определения характеристик сигналов с дискретной ФМ представления (4.52) и (4.53) равноценны. Поэтому в дальнейшем мы воспользуемся представлением (4.53).
На рис. 4.14 изображены временные диаграммы управляющего сигнала ![]() , несущего колебания
, несущего колебания ![]() и сигнала
и сигнала ![]() с дискретной фазовой модуляцией. Здесь в соответствии с (4.53) в качестве несущего колебания выступает
с дискретной фазовой модуляцией. Здесь в соответствии с (4.53) в качестве несущего колебания выступает
![]() . (4.54)
. (4.54)
Найдём амплитудный спектр сигналов дискретной ФМ. Для этого представим сигнал дискретной ФМ в виде суммы несущего колебания (4.54) и сигнала дискретной амплитудной модуляции с удвоенной амплитудой и противоположной начальной фазой несущего колебания (рис. 4.15)
![]() . (4.55)
. (4.55)
Тогда сигнал дискретной ФМ можно записать
![]() .
.
Перепишем это выражение в виде
![]() .
.
Здесь использовано известное тригонометрическое соотношение
sin x = - sin (x+π).
Подставляя в это выражение разложение (4.41) управляющего сигнала, после преобразований и перестановки местами ![]() и
и ![]() , получим
, получим
|
|
C учётом того, что
![]() ,
,
это выражение можно привести к виду
![]()
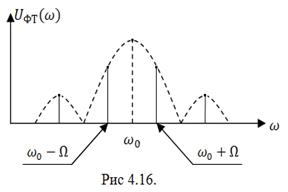
![]() . (4.56) Соотношение (4.56) позволяет построить диаграмму амплитудного спектра сигнала дискретной ФМ, изображённую на рис. 4.16.
. (4.56) Соотношение (4.56) позволяет построить диаграмму амплитудного спектра сигнала дискретной ФМ, изображённую на рис. 4.16.
Из выражения (4.56) и рис. 4.16 следует, что амплитудный спектр сигналов дискретной фазовой модуляции не содержит составляющей несущего колебания, а содержит только две боковые полосы, расположенные зеркально относительно частоты ![]() . Очевидно, что в случае модуляции несущего колебания управляющим сигналом в виде периодической последовательности прямоугольных импульсов ширина спектра сигнала дискретной ФМ составляет
. Очевидно, что в случае модуляции несущего колебания управляющим сигналом в виде периодической последовательности прямоугольных импульсов ширина спектра сигнала дискретной ФМ составляет
Δωфт = 2Ω .
Сравнение (4.42) дискретной АМ с (4.56) дискретной ФМ без учёта фазовых соотношений показывает, что огибающие спектров и боковые полосы совпадают при одном и том же ![]() . Различие состоит лишь в том, что в спектре дискретной АМ составляющая несущего колебания присутствует, а в спектре дискретной ФМ нет.
. Различие состоит лишь в том, что в спектре дискретной АМ составляющая несущего колебания присутствует, а в спектре дискретной ФМ нет.
Для демодуляции сигналов дискретной ФМ необходимо иметь колебание, относительно фазы которого будет измеряться фаза принимаемого сигнала дискретной ФМ. Это колебание называется опорным. В качестве опорного сигнала выступает колебание той же частоты, что и несущее колебание с амплитудой ![]() и начальной фазой
и начальной фазой ![]()
![]() . (4.57)
. (4.57)
Перемножим сигнал дискретной ФМ и опорный сигнал
![]() . (4.58)
. (4.58)
Подставляя (4.53) и (4.57) в (4.56) и используя формулу произведения синусов
![]() ,
,
после преобразований получим

 (4.57)
(4.57)
Результирующий сигнал ![]() содержит низкочастотную составляющую и составляющую удвоенной частоты
содержит низкочастотную составляющую и составляющую удвоенной частоты ![]() .
.
Колебание удвоенной частоты может быть подавлено фильтром нижних частот. Тогда сигнал на выходе ФНЧ имеет следующий вид:

Если установить начальную фазу опорного сигнала ![]() , на выходе ФНЧ будет иметь место демодулированный сигнал
, на выходе ФНЧ будет иметь место демодулированный сигнал ![]()
Из сказанного выше следует, что функциональная схема демодулятора сигналов дискретной ФМ должна содержать перемножитель П, генератор опорного сигнала ГОС фазовращатель ФВ и фильтр нижних частот ФНЧ. Эпюры напряжений на выходах элементов демодулятора приведены на рис. 4.17, а функциональная схема – на рис. 4.18.
В реальных радиотехнических системах опорный сигнал ![]() формируется устройством синхронизации. При этом возможны два варианта построения демодуляторов.
формируется устройством синхронизации. При этом возможны два варианта построения демодуляторов.
В первом варианте опорный сигнал формируется на передающей стороне и передаётся приёмную сторону по отдельному каналу. При этом для передачи опорного сигнала необходимы дополнительные энергетические и частотные затраты. При втором варианте опорный сигнал выделяется из информационного сигнала ![]() . В этом случае указанных дополнительных затрат не требуется, однако, техническая реализация демодулятора сложнее, чем в первом.
. В этом случае указанных дополнительных затрат не требуется, однако, техническая реализация демодулятора сложнее, чем в первом.
И в заключение отметим следующее. В подразделе 1.2 указывает что в радиотехнических системах, предназначенных для передачи цифровых сообщений, совокупность сигналов образуют ансамбль, важнейшей характеристикой которого является его объём М. Рассмотренные выше сигналы дискретной АМ, дискретной ЧМ и дискретной ФМ образуют ансамбли с М=2, т.к. управляющий сигнал может принимать только два значения. Вместе с тем, рассмотренными сигналами не ограничивается обширный класс сигналов дискретной модуляции. Дело в том, в качестве управляющих сигналов могут выступать сигналы с числом значений 4,8,…2n . Это приводит к тому, что для передачи информации используются ансамбли сигналов соответствующих объёмов. Для того чтобы отличить один ансамбль от другого не только по управляемому параметру (амплитуда, частота, начальная фаза), но и по объёму, вводится понятие кратности модуляции которая определяется как n = log2M. Тогда рассмотренные выше сигналы являются сигналами однократной дискретной модуляции. Если М=4, то сигналы являются сигналами двукратной модуляции, при М=8 – сигналами трёхкратной модуляции и т.д. На практике широкое распространение получили сигналы многократной фазовой модуляции: двукратной (ДФТ), трёхкратной (ТФТ) и большей кратности. С вопросами формирования демодуляции таких сигналов и оценки их эффективности можно познакомиться в специальной литературе.