Рассмотренные выше базовые оптические коммутаторы достаточно легко реализуются как переключатели n х n только при n=2. Сложность механической реализации существенно возрастает с ростом n, что косвенно подтверждает реализованный размер таких коммутаторов (n не выше 4, 8), приведенный на рисунке 13.6. Поэтому при построении коммутаторов большого размера используют различные технологии каскадирования переключателей 2х2 или 1х2/2х1 [5].
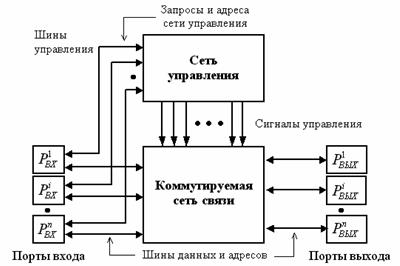
Рисунок 13.6 – Блок-схема многокаскадного оптического коммутатора
В целом коммутаторы можно представить в виде упорядоченных наборов входных Piвх и выходных портов Piвых, связанных между собой коммутируемой сетью связи (КСС). При этом КСС управляется централизованной системой управления. Основной упор при таком подходе делается на реализацию КСС. Топология сетей при этом формально может быть различна (шина, кольцо, звезда, дерево) - та, что используется для сетей в мультипроцессорных компьютерных системах, где роль наборов входных и выходных портов играют процессоры и блоки памяти. Следующий ряд факторов может оказать существенное влияние на выбор топологии [5]:
- длина коммутируемой цепи и связанное с ней время ожидания переключения КСС (network latency);
- расширяемость сети;
- степень связи (connection degree) узлов сети.
Длина коммутируемой цепи может быть разной в зависимости от топологии и может характеризоваться минимальной и максимальной длиной цепи, а значит, и минимальным и максимальным временем ожидания переключения. Расширяемость сети предполагает легкость подключения новых узлов сети.
При построении многокаскадных оптических коммутаторов технология построения КСС накладывает определенные ограничения, поэтому функциональную пригодность и эффективность МОК оценивают обычно с помощью следующих показателей [5]:
- требуемое число базовых элементов, учитывая, что стоимость реализации коммутатора по меньшей мере пропорциональна их числу;
- однородность коммутации, то есть такая ситуация, при которой потери при коммутации не зависит от комбинации портов входа-выхода;
- пересекаемость связующих волноводов (crossover), которую желательно минимизировать или исключить вовсе, учитывая, что при наличии такого пересечения могут возникнуть потери мощности оптического излучения и переходные помехи (crosstalk) в результате взаимодействия световых потоков;
- характеристики блокировки, то есть принадлежность многокаскадного оптического коммутатора к одному из двух классов коммутаторов: блокирующих или неблокирующих.
Поясним три последних показателя и дадим необходимые определения.
Мерой однородности могут служить максимальное и минимальное числа базовых переключателей (элементов) на оптическом пути, соединяющем различные комбинации портов входа-выхода, и соответствующие им оценки максимальных потерь при коммутации.
Возможность пересечения волноводов обусловлена тем, что в большинстве случаев коммутаторы изготавливаются на единой подложке и для исключения возможности пересечения топология должна быть реализована в виде плоского графа.
Коммутатор называется неблокирующим, если любой незанятый входной порт может быть соединен с любым неиспользуемым выходным портом, в противном случае (то есть если какое-то соединение не может быть реализовано) коммутатор является блокирующим.
В свою очередь, неблокирующие коммутаторы делятся:
- на коммутаторы, неблокирующие в строгом смысле, то есть такие неблокирующие коммутаторы, которые при использовании любой процедуры соединения не требуют перемаршрутизации какого-либо соединения;
- на коммутаторы, неблокирующие в широком смысле, то есть такие неблокирующие коммутаторы, которые при использовании определенной процедуры соединения не требуют перемаршрутизации какого-либо соединения;
- на перестраиваемые неблокирующие коммутаторы, то есть такие неблокирующие коммутаторы, которые в любом случае требуют перемаршрутизации какого-то из соединений.
Первый тип является наиболее желаемым, однако, он требует при реализации наибольшего числа базовых элементов. Второй тип является некоторым компромиссом между первым и третьим типами и используется очень широко. Преимущество последнего, третьего, типа коммутаторов - относительно малое число требуемых базовых элементов. Его основной недостаток - временный (на время перемаршрутизации) разрыв установленного соединения. Не все приложения могут допускать такую ситуацию. Кроме того, этот тип коммутаторов требует более сложных алгоритмов управления.