6.1. Стандартизация цифровых систем передачи
6.2. Временное объединение цифровых потоков
6.3. Оборудование временного группообразования асинхронных цифровых потоков
6.4. Оборудование асинхронного объединения цифровых потоков. Запоминающее устройство
6.1. Стандартизация цифровых систем передачи
Для рационального построения ЦСП необходимо, чтобы число каналов ТЧ, на которые они рассчитываются, было кратно минимальному стандартному числу. Это дает возможность использовать стандартное каналообразующее оборудование. Аналогично строятся и аналоговые системы передачи с ЧРК, где стандартные первичные, вторичные, третичные группы каналов позволяют применять унифицированное индивидуальное и групповое оборудование. Цифровые системы передачи также строятся согласно определенной иерархии. При этом учитываются следующие требования:
1) возможность передачи всех видов аналоговых и дискретных сигналов;
2) обеспечение как синхронного, так и асинхронного объединения, разделения и транзита цифровых потоков и сигналов в цифровом виде;
3) выбор стандартизированных скоростей передачи цифровых потоков с учетом возможности использования цифровых и аналоговых систем передачи. Плезиохронная цифровая иерархия ПЦИ/PDH определена в рекомендации G.702 ITU-T и включает в себя несколько уровней с разными скоростями передачи (таблица 1.2)
Таблица 1.2. Общее характеристики ОЦК и сетевых трактов ПЦИ/PDH.
Иерархия ПЦИ/PDH строится на основе основного цифрового канала (ОЦК 64 кбит/с), которое обозначается Е0. Поток Е1 получается мультиплексированием 32 ОЦК в один канал первичной группы со скоростью передачи 2048 кбит/с. Каналы высших уровней иерархии ПЦИ/PDH формируются по единой схеме: 4 потока Е1 мультиплексируются в поток Е2 со скоростью передачи 8448 кбит/с, 4 потока Е2 в Е3 с 34368 кбит/с, 4 потока Е3 в Е4 с 139264 кбит/с. Процессе мультиплексирования осуществляется выравнивание скоростей потоков методом подстановки служебных битов (процедура стаффинга). В результате для выделения канала первичной группы Е1 из потоков высших уровней иерархией требуется пошаговое мультиплексирование и демультиплексирование (рисунок 1.53).
Рисунок 1.53. Пошаговое мультиплексирование в ПЦИ/PDH.
Структура систем передачи ПЦИ/PDH, включат три уровня эталонной модели ВОС/OSI: физический, канальный и сетевой. Физический уровень описывает электрический интерфейс, а также параметры сигналов ПЦИ/PDH. Канальный уровень описывает процедуры мультиплексирования и демультиплексирования каналов разных уровней иерархии, цикловую структуру потоков, встроенные процедуры контроля ошибок и т.д. Сетевой уровень описывает процедуры управления каналами, а также контроль параметров ошибок на сетевом уровне.
Первичная ЦСП ИКМ-30 предназначена для городских и сельских сетей и обеспечивает организацию 30 каналов ТЧ. Скорость передачи группового сигнала 2048 кбит/с. Система ИКМ-30 работает по кабелям типов Т, ТП и может быть использована в качестве каналообразующей для ЦСП более высокого порядка.
Вторичная ЦСП ИКМ-120 предназначена для местных и зоновых сетей и обеспечивает организацию 120 каналов ТЧ. Предусмотрена возможность совместной передачи стандартной вторичной группы (исходный спектр 312...552 кГц) в цифровом виде и одного первичного цифрового потока. Скорость группового цифрового потока 8448 кбит/с. Цифровой поток организуется путем объединения четырех первичных цифровых потоков со скоростью 2048 кбит/с. Система передачи может работать по симметричным междугородным кабелям, волоконно-оптическим, радиорелейным и спутниковым линиям.
Третичная ЦСП ИКМ-480 предназначена для работы на зоновых и магистральных сетях связи и обеспечивает организацию 480 каналов ТЧ. Скорость группового цифрового потока 34368 кбит/с. Цифровой поток организуется путем объединения четырех вторичных цифровых потоков со скоростью 8448 кбит/с. Система передачи может работать по кабелю МКТ-4, волоконно-оптическим, радиорелейным и спутниковым линиям.
6.2. Временное объединение цифровых потоков
Объединение цифровых потоков происходит при формировании группового цифрового сигнала из цифровых потоков систем более низкого порядка, а также при объединении различных сигналов, передаваемых в цифровом виде, в единый цифровой поток.
При формировании группового цифрового сигнала возможны следующие способы объединения цифровых потоков: по символьный (поразрядный); по канальный (по кодовым группам каналов) и по системный (по циклам потоков объединяемых систем). На рисунке 1.54 показан принцип по символьного, а на рисунке 1.55 по канального объединения цифровых потоков. В обоих случаях объединяются четыре потока. При посимвольном объединении импульсы цифровых сигналов объединяемых систем укорачиваются и распределяются во времени так, чтобы в освободившихся интервалах могли разместиться вводимые импульсы других систем. При по канальном объединении цифровых потоков сужаются и распределяются во времени интервалы, отводимые для кодовых групп. Сигналы цикловой синхронизации необходимы для правильного распределения цифровых потоков на приемном конце. Объединение цифровых потоков по циклам аналогично по канальному объединению, только обрабатывается (сжимается) во времени и передается целиком цикл одного цифрового потока, а потом следующих.Наиболее простым и широко применяемым способом является способ посимвольного объединения.
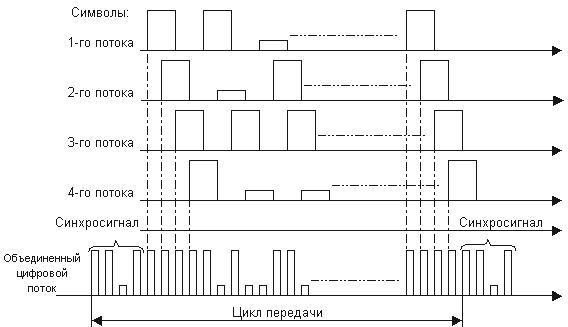
Рисунок 1.54. Формирование группового цифрового сигнала посимвольным способом объединения цифровых потоков.
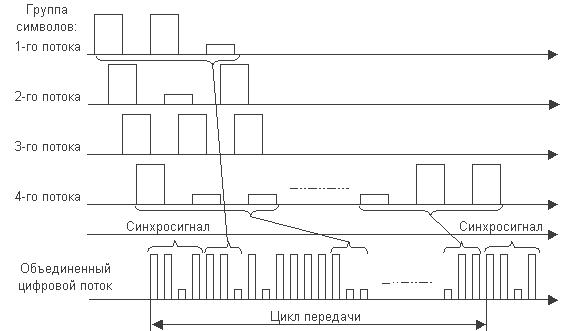
Рисунок 1.55. Формирование группового цифрового сигнала по канальным способом объединения цифровых потоков.
Объединение цифровых потоков осуществляется в оборудовании временного группообразования, принцип построения которого показан на рисунке 1.56. В состав оборудования входят: блоки цифрового сопряжения тракта передачи и приема (БЦСпер), (БЦСпр); устройства объединения (УО) в тракте передачи и разделения (УР) в тракте приема потоков; передатчик и приемник синхросигнала (Пер. СС), (Пр. СС); выделитель тактовой частоты (ВТЧ) линейного цифрового сигнала; генераторное оборудование (ГО) передающей и приемной станции.
Рисунок 1.56. Принцип построения оборудования группообразования.
Сигналы с выходов БЦСпер совместно с сигналами цикловой синхронизации поступают на вход схемы объединения. Временной сдвиг между импульсными последовательностями на выходах БЦСпер обеспечивается управляющими импульсами с ГО. На приеме УР распределяет импульсы группового сигнала по своим БЦСпр, а также сигналы Пр. СС.
Генераторное оборудование систем передачи более низкого порядка может работать либо независимо от оборудования объединения и разделения цифровых потоков, либо должна обеспечиваться синхронизация общим задающим генератором. В зависимости от этого объединение цифровых потоков будет асинхронным или синхронным.
При синхронном объединении цифровых потоков скорость записи в БЦС и скорость считывания этой информации из БЦС будут постоянными и кратными, так как вырабатываются одним и тем же ГО. В данном случае между командами записи и считывания должен быть установлен требуемый временной сдвиг, чтобы считывание информации происходило после ее поступления в БЦСпер.
При асинхронном объединении цифровых потоков, когда ГО устройств объединения цифровых потоков и ГО устройств формирования цифровых потоков низшего порядка работают независимо, возможно некоторое расхождение между скоростями записи и считывания. Для согласования этих скоростей необходимо принимать соответствующие меры.
При объединении цифровых потоков производится запись информационных символов в запоминающее устройство ЗУ с частотой fз и последующее их считывание с частотой fсч.и. При синхронном объединении цифровых потоков fз= fсч.и. При асинхронном объединении цифровых потоков частоты записи и считывания могут изменяться в некоторых пределах и иметь значения
fз.н - ∆fз max ≤ fз ≤ fз.н + ∆fз max , (1.25)
fсч.и. н - ∆fсч.и. max ≤ fсч.и. ≤ fсч.и. н+ ∆fсч.и. max, (1.26)
где fз.н, fсч.и. н —номинальные значения частоты записи и считывания информационных символов; ∆fз max, ∆fсч.и. max —максимальное отклонение частот записи и считывания от номинального значения, вызванное нестабильностью работы ГО.
При таких ситуациях могут возникнуть моменты, когда fз. > fсч.и. и память ЗУ будет заполнена или когда fз. < fсч.и и память ЗУ будет пуста и в очередной момент считывать будет нечего. В обеих ситуациях передача цифрового потока будет происходить с искажениями, так как в первом случае часть информационных символов пропадает, а во втором - появляются дополнительные временные позиции, которые в исходном цифровом потоке отсутствуют. Чтобы избежать этих нарушений, требуется обеспечить согласование скоростей.
При fз. <
fсч.и производится положительное выравнивание скоростей: в считанную последовательность вводится дополнительный балластный тактовый интервал, который на приеме должен быть изъят из передаваемой последовательности информационных символов. Если fз. > fсч.и. производится отрицательное согласование скоростей; из считываемой последовательности изымается один тактовый интервал, информация которого передается по специальному временному каналу и на приеме вводится в передаваемый поток на свое место.
При асинхронном объединении цифровых потоков находят применение системы как с односторонним, так и двусторонним согласованием скоростей.
В системах с односторонним согласованием скоростей частота fсч.и выбирается заведомо большей или меньшей, чем fз. (в зависимости от положительного или отрицательного согласования скоростей). При этом в системах с положительным согласованием скоростей должно выполняться условие
fсч.и. н - ∆fсч.и. max > fз.н + ∆fз max.(1.27)
Тогда при согласовании скоростей в считанную последовательность вводится дополнительный неинформационный (балластный) тактовый интервал (запретом одного импульса считывания), который на приеме исключается из нее по соответствующей команде согласования скоростей.
В системах с отрицательным согласованием скоростей должно выполняться условие
fсч.и. н + ∆fсч.и. max < fз.н - ∆fз max. (1.28)
Тогда при согласовании скоростей в этих системах на передаче из информационной последовательности изымается один тактовый интервал (дополнительное считывание), который передается по дополнительному каналу и на приеме по команде согласования скоростей снова вводится в информационную последовательность.
В системах с двусторонним согласованием скоростей частота fсч.и. н выбирается равной fз.н. При этом должно выполняться условие
fсч.и. н ± ∆fсч.и. max = fз.н ± ∆fз max.(1.29)
В зависимости от знака разности частот fз. и fсч.и. при возникновении неоднородности необходимо либо вводить в считанную последовательность дополнительный тактовый интервал, либо изымать его и передавать по дополнительному каналу.
В реальной аппаратуре объединения потоков необходимо передавать еще служебные сигналы (цикловую синхрокомбинацию, команды согласования скоростей, импульсы служебной связи, аварийные сигналы и др.), поэтому частота считывания выбирается больше частоты записи:
fс.ч. = fсч.и. + fсл, (1.30)
где fсл —частота следования служебных импульсов. Таким образом, из-за расхождения частот записи и считывания цифровых потоков периоды между моментами записи и считывания будут отличаться на величину ∆t=Тз-Тсч, где Тз=1/fз - период записи информационных символов; Тсч=1/fсч - период их считывания.
На рисунке 1.57, а показан пример записи импульсной последовательности. Для упрощения реальный сигнал от источника информации, состоящий из 1 и 0, заменен сигналом, состоящим только из 1. При ∆t=0, когда fз = fсч или Тз-Тсч =0, считанная из ЗУ последовательность будет такой же. На рисунке 1.57, б показана последовательность считываемых импульсов, для которых fсч > fз (∆t>0), с конкретным значением отношения Тсч/Тз=13/16. Как видно ил рисунка, импульсы считывания опережают записанные импульсы и через некоторое время наступит момент, когда ячейки памяти будут свободны от информационных импульсов и появятся нулевые символы, которые называются временными сдвигами (рисунок 1.57, в). Интервалы времени между такими символами в последовательности считанных импульсов определяют период временных сдвигов.
Рисунок 1.57. Временные диаграммы поясняющие принцип возникновения временных сдвигов и неоднородностей.
Число информационных импульсов между соседними временными сдвигами будет R=П[Тсч/(Тз-Тсч)], где символ П означает округление до ближайшего целого. При синхронном объединении потоков отношение Тсч/(Тз-Тсч) есть целое число. Например, при Тсч/Тз = 12/16 символ П=3, т. е. временной сдвиг будет после каждых трех позиций передачи информации. Тогда в считанной последовательности импульсов интервалы между временными сдвигами будут постоянными. Такую последовательность импульсов называют однородной, так как временные сдвиги формируются на строго определенных позициях в цикле передачи и могут использоваться для передачи служебных сигналов. Частота следования последних постоянна, что позволяет выделить их на приеме. При асинхронном объединении цифровых потоков из-за нестабильности задающих генераторов, вырабатывающих тактовые частоты, отношение Тсч/(Тз-Тсч) - дробное число и его величина будет меняться во времени. В этом случае (рисунок 1.57, в) через определенное число временных сдвигов число импульсов между соседними временными сдвигами изменяется и появляется неоднородность. Период возникновения подобных неоднородностей определяется разностью
[Тсч/(Тз-Тсч)] - П [Тсч/(Тз-Тсч)]=±1 (1.31)
Для приведенного выше примера Тсч/Тз=13/16. При этом [Тсч/(Тз-Тсч)] - П [Тсч/(Тз-Тсч)]=13/3 - 4=1/3, следовательно, в данном случае неоднородности возникают в каждом третьем временном сдвиге и в интервале между временным сдвигом будет не четыре, а пять считанных импульсов. В дальнейшем цикл временных сдвигов повторится. При появлении неоднородностей требуется обеспечить согласование скоростей передачи символов путем коррекции соответствующих моментов временных сдвигов. В рассмотренном случае можно уменьшить соотношение между частотами записи и считывания до 12/15. При этом временные сдвиги будут появляться после четырех считанных импульсов, но каждый 13-й импульс последовательности записи должен изыматься и передаваться по отдельному каналу (производится отрицательное согласование скоростей). Если, наоборот, соотношение между частотами записи и считывания увеличить до 15/18, то интервалы между временными сдвигами, содержащие четыре считанных импульса, надо увеличивать до пяти, вводя дополнительные тактовые интервалы (производится положительное согласование скоростей).
Для передачи команд согласования скоростей и информационного символа при отрицательном согласовании скоростей организуются дополнительные временные каналы на определенных позициях цикла передачи. Следовательно, согласование скоростей может производиться в строго определенный момент, обусловленный структурой цикла передачи объединенного цифрового потока. Передача КСС приводит к снижению эффективности работы системы передачи, так как необходимо повышать тактовую частоту передачи или уменьшать объем передачи полезной информации. Число КСС, а следовательно и объем дополнительной информации будут зависеть от частоты возникновения неоднородности, которая в основном зависит от стабильности работы генераторного оборудования. Учитывая достаточно высокую стабильность ГО, передаваемые команды согласования скоростей занимают 1...2% объема передаваемой информации.
6.3. Оборудование временного группообразования асинхронных цифровых потоков
Рассмотрим структурную схему оборудования временного группообразования с асинхронным сопряжением цифровых потоков, построенного по системе с двусторонним согласованием скоростей (рисунок 1.58). Оборудование передающей станции содержит блоки асинхронного сопряжения тракта передачи (БАСпер) для каждого из объединяемых цифровых потоков, а приемной станции - соответственно блоки асинхронного сопряжения тракта приема (БАСпр). На передающей станции цифровой поток от системы низшего порядка, например ИКМ-30, вводится в соответствующий БАСпер. Здесь цифровой поток записывается в запоминающее устройство (ЗУ). Запись осуществляется импульсной последовательностью тактовой частоты, выделяемой из входного потока выделителем тактовой частоты (ВТЧ). Записанный в ЗУ поток считывается импульсной последовательностью, поступающей от ГО передающей станции. Считанные цифровые потоки от всех БАСпер передаются в устройство объединения (УО), где объединяются в групповой цифровой поток.
Для контроля взаимного временного положения импульсы, управляющие записью и считыванием, подаются на временной детектор ВД, который управляет работой передатчика команд согласования скоростей Пер. КСС. При появлении неоднородности в зависимости от ее знака из ВД к Пер. КСС подается соответствующая команда на согласование скоростей.
Рисунок 1.58. Структурная схема оборудования временного группообразования с асинхронным сопряжением цифровых потоков, построенного по системе с двусторонним согласованием скоростей передачи.
При положительном согласовании скоростей на одной из временных позиций цикла передачи информация из ЗУ не считывается и на этой позиции передается балластный символ. На приеме данная позиция должна быть вычеркнута. Тем самым реальная скорость считывания информации из ЗУ несколько уменьшается. Такое согласование скоростей осуществляется путем запрета с помощью ячейки НЕТ одного импульса считывания. При отрицательном согласовании скоростей производится дополнительное считывание информации из ЗУ. Считывание происходит соответствующим импульсом, который подается от Пер. КСС через ячейку ИЛИ в строго определенные временные позиции цикла, на которых формируется временной канал отрицательного согласования скоростей.
Объединенный цифровой поток с выхода схемы объединения поступает в линейный тракт. В приемном устройстве объединенный цифровой поток распределяется через схему распределения по своим ЗУ блоков асинхронного сопряжения тракта приема БАСпр. Работой ячеек УР и БАСпр управляют импульсные последовательности от генераторного оборудования ГОпр, синхронная работа которого с ГОпер обеспечивается ВТЧ. После считывания с частотой, равной средней частоте записи, восстанавливается первоначальная скорость каждого из асинхронных цифровых потоков, объединяемых в оборудовании временного группообразования. Средняя частота считывания устанавливается устройством фазовой автоподстройки частоты (ФАПЧ), которое включает в себя генератор, управляемый напряжением (ГУН), временной детектор (ВД) и схему управления (СУ). На выходе СУ формируется управляющий сигнал, соответствующий текущему значению временного интервала между моментами записи и считывания.
По сигналу о необходимости положительного согласования скоростей, зафиксированному Пр. КСС, через логический элемент НЕТ осуществляется запрет записи информации в ЗУ. Временное положение сигнала запрета записи соответствует моменту осуществления положительного согласования скоростей в передающем устройстве. Сигнал запрета записи должен убрать из информационного потока балластный символ, вводимый при положительном согласовании скоростей. Отсутствие сигнала записи на выходе схемы НЕТ отметит и временной детектор, после чего частота считывания плавно уменьшится. По сигналу о необходимости отрицательного согласования скоростей с помощью логического элемента ИЛИ2 открывается элемент И схемы распределителя и в передаваемый информационный поток вводится дополнительный символ, изъятый при отрицательном согласовании скоростей. Одновременно через схему ИЛИ3 вводится дополнительный импульс управления записью, который поступает на ВД, в результате чего частота считывания плавно увеличивается. Таким образом, плавное изменение в допустимых пределах частоты считывания позволяет согласовать скорости записи и считывания. Правильное распределение на приеме группового сигнала по потокам, контроль и поиск режима синхронизма обеспечивается приемником синхросигнала. К параметрам этого приемника предъявляются довольно жесткие требования, так как время установления режима синхронизма при его нарушении должно быть меньше времени выхода из синхронизма оборудования низовых объединяемых потоков. В противном случае в этом оборудовании произойдет сбой синхронизации.
6.4. Оборудование асинхронного объединения цифровых потоков. Запоминающее устройство
В запоминающем устройстве (рисунок 1.59.) информационные символы через ячейки И записываются в ячейки памяти Я1 – ЯL. Процессом записи управляет распределитель записи, работающий с частотой fз, равной тактовой частоте поступающих информационных сигналов. Считывание осуществляется импульсными последовательностями с соответствующих выходов распределителя считывания, который управляется сигналом от ГОпер аппаратуры объединения цифровых потоков. Информация, считанная с ячеек Я1 – ЯL,объединяется логическим элементом ИЛИ. Число ячеек памяти выбирается таким, чтобы момент считывания всегда отставал от момента записи. Минимальное число ячеек памяти зависит от нескольких факторов. Рассмотрим некоторые из них.
Число ячеек памяти зависите от количества следующих подряд служебных символов в цикле передачи, относящихся к одному цифровому потоку. Служебные символы передаются на импульсных позициях временных сдвигов, которые, в свою очередь, организуются путем запрета считывания информации в соответствующие моменты времени.
Рисунок 1.59. Структурная схема запоминающего устройства.
Однако информационные символы продолжают поступать на вход ЗУ, поэтому должно быть предусмотрено соответствующее число дополнительных ячеек памяти. Для уменьшения числа ячеек памяти ЗУ желательно, чтобы служебные символы были равномерно рассредоточены в цикле передачи. Но в некоторых случаях, например при передаче синхросигнала, целесообразно формировать сосредоточенные служебные символы. Так, во вторичной ЦСП сосредоточиваются восемь служебных символов подряд - по два на каждый цифровой поток, а в третичной и четверичной ЦСП - 12 служебных символов (по три на каждый цифровой поток).
Так как согласование скоростей можно производить в строго определенный момент времени, определяемый импульсными позициями КСС в цикле объединенного цифрового потока, необходимо учитывать относительное время ожидания. Последнее зависит также и от длительности самого цикла (числа символов в цикле). Это требует соответствующего увеличения объема памяти.
Дополнительный объем памяти определяется значением временных колебаний, изменений частоты записи и считывания, вносимый как оборудованием асинхронного объединения/разделения цифровых потоков, так и оборудованием ЦСП объединяемых цифровых потоков. Обычно в зависимости от особенности построения цикла передачи, главным образом структуры и распределения символов синхросигнала, минимально необходимое число ячеек памяти составляет от пяти до восьми.
К одноименным выходам распределителей записи и считывания (на рисунке 1.59 используются выходы L) подключается ВД.
Временной детектор.
Временные интервалы между моментами записи и считывания контролируются ВД. В оборудовании временного группообразования используются цифровой и аналоговый временные детекторы. Цифровой детектор применяется в передающей части для определения момента возникновения неоднородности. В системах с двусторонним согласованием скоростей ВД должен не только обнаруживать моменты возникновения неоднородности, но и определять ее знак. В цифровом детекторе (рисунок 1.60) одноименные выходы распределителей записи и считывания подключены к раздельным выходам триггера DD1. Выходы триггера соединены с логическими элементами DD2 и DD3, на другие входы которых подаются контрольные импульсные последовательности с распределителя записи. Временное положение контрольных последовательностей выбирается таким образом, чтобы при нормальном режиме работы ЗУ на схемах И импульсы с триггера не совпадали по времени с контрольными импульсами. Если временной интервал между импульсами записи и считывания достиг величины, при которой необходимо согласование скоростей, на выходе соответствующей ячейки И появится импульс, который поступит в передатчик КСС.
Рисунок 1.60. Цифровой временной детектор.
При рассмотрении работы ВД примем число ячеек памяти в ЗУ равным четырем, тогда:
- на вход S триггера будет подаваться сигнал с 4-го выхода распределителя считывания,
- на вход R сигнал с 4-го выхода распределителя записи,
- на схему DD2 - сигнал с 3-го выхода распределителя записи,
- на схему DD3 - сигнал с 1-го выхода распределителя записи.
При отсутствии согласования скоростей сигналы на выходах DD2 и DD3 отсутствуют. При отрицательном согласовании скоростей импульсная последовательность с 3-го выхода распределителя записи совпадает с единичным состоянием выхода триггера Q, в результате чего формируется сигнал на выходе логического элемента И1. При положительном согласовании скоростей импульсная последовательность с 1-го выхода распределителя записи совпадает с единичным состоянием выхода Q триггера и формируется сигнал на выходе логического элемента И2.
Аналоговый детектор используется в приемной части для определения текущего значения временного интервала между моментами записи и считывания. В аналоговом детекторе (рисунок 1.61), как и в цифровом, импульсные последовательности с одноименных выходов распределителей записи и считывания подаются на раздельные входы R и S триггера, скважность сигнала, на выходе которого характеризует взаимное временное положение импульсов записи и считывания. Сигнал с выхода триггера подается на вход фильтра нижних частот ФНЧ, который выделит постоянную составляющую напряжения сигнала. Величина этого напряжения зависит от скважности сигнала. При нормальной работе ЗУ импульсы записи и считывания сдвинуты относительно друг друга на половину периода их следования. В этом случае скважность сигнала на выходе триггера будет равна двум, а напряжение постоянной составляющей на выходе ФНЧ — среднему значению, что соответствует номинальной скорости считывания. При увеличении или уменьшении временного интервала между моментами записи и считывания изменяются скважность сигнала на выходе триггера и значение постоянной напряжения сигнала. Эго напряжение подается на схему управления ГУН, которая плавно изменяет частоту считывания, увеличивая или уменьшая ее в зависимости от согласования скоростей.
Рисунок 1.61. Структурная схема аналогового детектора.
Передача команд согласования скоростей.
Команды согласования скоростей должны обладать практически такой же помехозащищенностью, как и цикловые синхросигналы. Это объясняется тем, что ошибка при опознавании КСС равносильна изменению на один такт длительности цикла передачи (в ту или иную сторону в зависимости от вида ошибки) и вызовет сбой цикловой синхронизации в соответствующем объединяемом потоке. Последнее, в свою очередь, может вызвать сбой цикловой синхронизации во всех системах более низкого порядка этого цифрового потока. Однако между синхросигналами и КСС есть существенная разница, которая заключается в том, что первые обладают периодичностью, так как передаются в каждом цикле передачи, тогда как вторые несут информацию об однократных изменениях этого состояния. Поэтому помехозащищенность синхросигнала достигается методом накопления, и ошибка в одном или даже нескольких синхросигналах не вызывает сбоя цикловой синхронизации, а помехозащищенность КСС обеспечивается кодами, исправляющими ошибки.
В системах с односторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии или наличии КСС. Для передачи этой информации достаточно одного двоичного разряда. Тогда для защиты от искажений одного символа КСС достаточно использовать трехразрядную кодовую группу, для защиты двух символов - пятиразрядную кодовую группу и т. д. Обычно в системах с односторонним согласованием скоростей для передачи соответствующих команд используются кодовые группы вида 00...0 - для передачи информации об отсутствии согласования скоростей и 11...1 для передачи информации о наличии согласования скоростей. Число символов в кодовой группе выбирают нечетным. При этом правильное опознавание КСС осуществляется, если число искаженных символов не превышает половины общего числа символов в команде.
В системах с двусторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии согласования скоростей, положительном согласовании скоростей и отрицательном согласовании скоростей. Для передачи этой информации необходимо уже два двоичных разряда. Тогда для защиты от искажений одного символа КСС необходимо использовать пятиразрядную кодовую комбинацию, для защиты от искажения двух символов - семиразрядную кодовую комбинацию и т. д. Увеличение числа КСС и числа разрядов в кодовой комбинации приводит к возрастанию объема передаваемой информации.
Таким образом, по объему передаваемой информации системы с двусторонним согласованием скоростей и передачей трех команд менее экономичны, чем системы с односторонним согласованием скоростей, так как требуют большего объема передаваемой информации.
Стремление реализовать достоинства систем с двусторонним согласованием скоростей и вместе с тем обеспечить такую же помехозащищенность, как в системе с односторонним согласованием скоростей при одинаковом числе разрядов кодовых групп команд, привело к созданию системы с двусторонним согласованием скоростей с исключением передачи команды об отсутствии согласования. Такие системы называются системами с двусторонним согласованием скоростей и двухкомандным управлением. По числу передаваемых команд подобные системы идентичны системам с односторонним согласованием скоростей. Структура двухкомандного сигнала показана на рисунке 1.62,а. При отсутствии согласования скоростей с передающей станции будет поступать чередование положительных и отрицательных команд согласования скоростей. Если временной интервал ∆Т между моментами записи и считывания достигнет значения Тсч, то необходимо произвести согласование скоростей. В этом случае передаются подряд две команды положительного или отрицательного согласования скоростей (рисунок 1.62, а). Такая структура передачи КСС позволяет выявить одиночные ошибки в передаваемых командах. Для рассмотрения возможности определения ошибок интервал времени передачи чередующихся команд назовем пассивным, а интервал времени передачи команд положительного или отрицательного согласования скоростей (две одинаковые команды подряд) активным.
На рисунке 1.62, б, в показаны ошибки в пассивном интервале передачи команд. Эти ошибки легко обнаружить, так как подряд следуют три одинаковые команды, что при нормальной работе невозможно. Сложнее выявить ошибки в активном интервале (рисунок 1.62, г, д), поскольку в данном случае положительная команда трансформируется в отрицательную и наоборот. С учетом возможности коррекции ошибок в пассивном интервале или в обоих случаях и строятся приемники команд согласования скоростей.
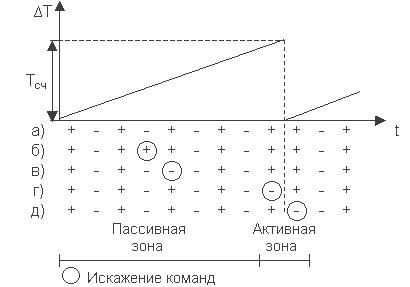
Рисунок 1.62. Структура двухкомандного сигнала при двустороннем согласовании скоростей.
Приемник КСС с коррекцией ошибки в пассивном интервале показан на рисунке 1.63. Он содержит три узла: опознаватель, анализирующее устройство, корректор ошибок. Опознаватель определяет знак согласования скоростей. Анализатор выявляет положительную или отрицательную КСС. Он содержит триггер Тг, на один вход которого подаются импульсы команд положительного согласования скоростей, а на другой - отрицательные, и две схемы И.
При появлении подряд двух импульсов одинаковых команд второй импульс пройдет через свою схему И. Корректор ошибок служит для выявления ошибки в пассивном интервале времени. Он содержит два счетчика команд: положительных и отрицательных.
Рисунок 1.63. Приемник команд согласования скоростей с коррекцией ошибок на пассивном интервале передачи КСС.
Емкость счетчиков - три единицы. Счетчики подключены к опознавателю знака так, что появление команды определенного знака записывается в свой счетчик, а для другого счетчика он является сигналом сброса.
Если в счетчик подряд поступило три команды, необходимо осуществить коррекцию. При коррекции производится вставка или изъятие из цифрового потока одного из временного интервала в зависимости от прошедшей команды согласования скоростей. Такая коррекция не позволяет восстановить передаваемую кодовую комбинацию потока, но дает возможность сохранить длительность его цикла, что не повлечет за собой срыва цикловой синхронизации в этом потоке.
Для коррекции ошибок в активном интервале передачи команд с передающей станции поступает знак промежуточного значения изменения временного интервала между сигналами записи и считывания. Необходимо учесть, что команды согласования скоростей будут передаваться довольно редко. Это определяется стабильностью частоты задающего генератора, используемого при формировании низовых потоков и в оборудовании временного группообразования. Рассмотрим это на примере системы передачи ИКМ-120. Как будет показано далее, расхождение частот может достигать 120 Гц, т. е. за 1 с максимальное число КСС равно 120, а число циклов за 1 с - 8000, т. е. в 67 раз больше. В каждом цикле имеются временные позиции для передачи информационных символов при отрицательном согласовании скоростей. При отсутствии команд согласования скоростей эти временные позиции можно использовать для передачи знака промежуточного значения изменения временного интервала между сигналами записи и считывания. Из этого видно, что информация о знаке промежуточного значения изменения временного интервала будет передаваться значительно чаще, чем сами КСС.
При использовании такого способа коррекции каждая сдвоенная команда несет в себе информацию только о наличии согласования скоростей, в то время как решение о знаке этого согласования принимается на основе многократно передаваемой информации о знаке изменения временного интервала между сигналами записи и считывания. Как показано на рисунке 1.62, г, д при одиночном искажении сдвоенных команд последовательности (++) преобразуются в последовательности (- -), а последовательности (- -) (на рисунке не показаны) - в последовательности (++); при этом момент передачи сдвоенных команд сдвигается на один временной интервал передачи КСС. Это и используется в приемнике согласования скоростей для коррекции ошибок.
В схему приемника команд согласования скоростей добавляются узлы определения знака промежуточного состояния скоростей и устройство сравнения, определяющее несоответствие информации о знаке согласования скоростей виду сдвоенной команды. Устройство фазовой автоподстройки частоты. Схема устройства ФАПЧ приведена на рисунке 1.64. В состав ее входят временной детектор (ВД), схема управления (СУ) и генератор, управляемый напряжением, (ГУН). Работа аналогового ВД была рассмотрена ранее. Схема управления, содержащая ФНЧ, выделяет из сигнала с выхода ВД постоянную составляющую напряжения. Для идеального восстановления первоначальной скорости цифрового потока ФНЧ должен иметь бесконечно малую полосу пропускания.
Рисунок 1.64. Устройство фазовой автоподстройки частоты.
Это позволит значительно уменьшить временные флуктуации импульсов передаваемого цифрового потока, вносимые оборудованием временного группообразования. Однако при этом не обеспечивается необходимая полоса захвата устройства ФАПЧ, которая не может быть меньше максимального расхождения частот записи в передающем устройстве fз.пер и считывания в приемном устройстве fcч.пр. Следовательно,
∆FФНЧ> fз.пер δ f з.пер+ fз.перδ f сч.пр (1.33)
где ∆FФНЧ - полоса пропускания ФНЧ; δ - относительная нестабильность частоты f. Так, при объединении цифровых потоков сформированных аппаратурой ИКМ-30:fз = f сч =2048 кГц, δ f з =δ f сч = 3·10-5, ∆FФНЧ =120 Гц.
На вход ГУН будут проходить все составляющие сигнала с выхода ВД, попадающие в полосу ∆FФНЧ, что приводит к временным флуктуациям передаваемого цифрового потока. Для уменьшения этих флуктуаций в схемах ФАНЧ применяются специальные устройства.