2.1. Классификация и структура микроконтроллеров
2.2. Структура процессорного ядра
2.3. Структура и порядок функционирования процессора
В настоящее время технически процессоры, как правило, реализуются в виде микропроцессорных устройств выполненных на базе одной микросхемы, в связи с этим понятие процессор и микропроцессор (МП) практически равнозначны.
2.1. Классификация и структура микроконтроллеров
В настоящее время выпускается целый ряд типов микроконтроллеров (МК). Все эти приборы можно условно разделить на три основных класса:
- 8-разрядные МК для встраиваемых приложений;
- 16- и 32-разрядные МК;
- цифровые сигнальные процессоры (DSP).
Наиболее распространенным представителем семейства МК являются 8-разрядные приборы. Росту популярности 8-разрядных МК способствует постоянное расширение номенклатуры изделий, выпускаемых такими известными фирмами, как Motorola, Microchip, Intel, Zilog, Atmel и многими другими.
Современные МК обладают, как правило, рядом отличительных признаков:
- модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд (линейка) МК, различающихся объемом и типом памяти программ, объемом памяти данных, набором периферийных модулей, частотой синхронизации;
- использование закрытой архитектуры МК, которая характеризуется отсутствием линий магистралей адреса и данных на выводах корпуса МК. Таким образом, МК представляет собой законченную систему обработки данных, наращивание возможностей которой с использованием параллельных магистралей адреса и данных не предполагается;
- использование типовых функциональных периферийных модулей (таймеры, процессоры событий, контроллеры последовательных интерфейсов, аналого-цифровые преобразователи и др.), имеющих незначительные отличия в алгоритмах работы в МК различных производителей;
- расширение числа режимов работы периферийных модулей, которые задаются в процессе инициализации регистров специальных функций МК.
При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей.
Структура модульного МК приведена на рис. 2.1.
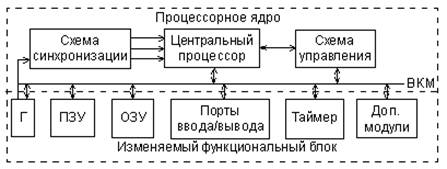
Рисунок 2.1 – Модульная организация МК
Процессорное ядро включает в себя:
- центральный процессор;
- внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления;
- схему синхронизации МК;
- схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т.д.
Изменяемый функциональный блок включает в себя
- модули памяти различного типа и объема,
- порты ввода/вывода,
- модули тактовых генераторов (Г),
- таймеры.
В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
2.2. Структура процессорного ядра
Основными характеристиками, определяющими производительность процессорного ядра МК, являются:
- набор регистров для хранения промежуточных данных;
- система команд процессора;
- способы адресации операндов в пространстве памяти;
- организация процессов выборки и исполнения команды.
С точки зрения системы команд и способов адресации операндов процессорное ядро современных один из двух принципов построения процессоров:
- процессоры с CISC-архитектурой, реализующие так называемую полную систему команд (Complicated Instruction Set Computer);
- процессоры с RISC-архитектурой, реализующие сокращенную систему команд (Reduced Instruction Set Computer).
CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику возможность выбрать наиболее подходящую команду для выполнения необходимой операции. Выборка команды на исполнение осуществляется побайтно в течение нескольких циклов работы. Время выполнения команды может составлять от 1 до 12 циклов. При этом система команд, как правило, не ортогональна, то есть не все команды могут использовать любой из способов адресации применительно к любому из регистров процессора. К МП с CISC-архитектурой относятся МП фирмы Intel, МП семейств НС05, НС08 и НС11 фирмы Motorola и ряд других.
В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для реализации более сложных операций приходится комбинировать команды. При этом все команды имеют формат фиксированной длины (например, 12, 14 или 16 бит), выборка команды из памяти и ее исполнение осуществляется за один цикл (такт) синхронизации. Система команд RISC-процессора предполагает возможность равноправного использования всех регистров процессора. Это обеспечивает дополнительную гибкость при выполнении ряда операций. К МК с RISC-процессором относятся МК AVR фирмы Atmel, МК PIC16 и PIC17 фирмы Microchip и другие.
В общем случае RISC-процессоры имеют более высокую производительность по сравнению с CISC МП при одной и той же тактовой частоте внутренней магистрали.
Однако на практике вопрос оценки быстродействия сложен и неоднозначен.
Во-первых, оценка производительности МК по времени выполнения команд различных систем (RISC и CISC) не совсем корректна. Обычно производительность МП и МК принято оценивать числом операций пересылки "регистр-регистр", которые могут быть выполнены в течение одной секунды. В МК с CISC-процессором время выполнения операции "регистр-регистр" составляет от 1 до 3 циклов, что, казалось бы, уступает производительности МК с RISC-процессором. Однако стремление к сокращению формата команд при сохранении ортогональности системы команд RISC-процессора приводит к вынужденному ограничению числа доступных в одной команде регистров. Таким образом, операция пересылки содержимого одного из доступных регистров в другой (не источник операнда и не рабочий) потребует использования двух команд. Такая необходимость часто возникает при пересылке содержимого одного из регистров общего назначения (РОН) в один из портов МК. В то же время, в системе команд большинства CISC-процессоров присутствуют команды пересылки содержимого РОН в один из портов ввода/вывода. То есть более сложная система команд иногда позволяет реализовать более эффективный способ выполнения операции.
Во-вторых, оценка производительности МК по скорости пересылки "регистр-регистр" не учитывает особенностей конкретного реализуемого алгоритма управления. Так, при разработке быстродействующих устройств автоматизированного управления основное внимание следует уделять времени выполнения операций умножения и деления при реализации уравнений различных передаточных функций. Поэтому в критических ситуациях, требующих высокого быстродействия, следует оценивать производительность на множестве тех операций, которые преимущественно используются в алгоритме управления и имеют ограничения по времени выполнения.
В-третьих, необходимо еще учитывать, что указанные в справочных данных на МК частоты синхронизации обычно соответствуют частоте подключаемого кварцевого резонатора, в то время как длительность цикла центрального процессора определяется частотой обмена по ВКМ. Соотношение этих частот индивидуально для каждого МК и должно быть принято в расчет при сравнении производительности различных моделей контроллеров.
С точки зрения организации процессов выборки и исполнения команды в современных МП применяется одна из двух уже упоминавшихся архитектур:
- фон-неймановская (принстонская);
- гарвардская.
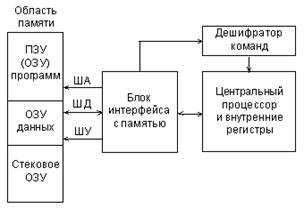
Основной особенностью фон-неймановской архитектуры является использование общей памяти для хранения программ и данных, как показано на рис. 2.2. Основное преимущество архитектуры Фон-Неймана – упрощение устройства МП, так как реализуется обращение только к одной общей памяти. Кроме того, использование единой области памяти позволяло оперативно перераспределять ресурсы между областями программ и данных, что существенно повышало гибкость МПС с точки зрения разработчика программного обеспечения. Размещение стека в общей памяти облегчало доступ к его содержимому. Неслучайно поэтому фон-неймановская архитектура стала основной архитектурой универсальных компьютеров, включая персональные компьютеры.
Основной особенностью гарвардской архитектуры является использование раздельных адресных пространств для хранения команд и данных, как показано на рис. 2.3.
|
|
|
|
Рисунок 2.2 – Структура МПС с фон-неймановской архитектурой |
Рисунок 2.3 – Структура МПС с гарвардской архитектурой |
2.3. Структура и порядок функционирования процессора
Процессор (рис. 2.4) обычно представляет собой отдельную микросхему или же часть микросхемы (в случае микроконтроллера).
Микросхема процессора обязательно имеет следующие выводы:
- шины адреса,
- шины данных
- шины управления.
- вывод внешнего тактового сигнала или кварцевого резонатора (CLK), так как процессор всегда представляет собой тактируемое устройство.
- вывод сигнал начального сброса RESET. При включении питания, при аварийной ситуации или зависании процессора подача этого сигнала приводит к инициализации процессора, заставляет его приступить к выполнению программы начального запуска.
- шина питания – обычно имеет одно напряжение питания (+5 В или +3,3 В) и общий провод ("землю").
Иногда некоторые сигналы и шины мультиплексируются, чтобы уменьшить количество выводов микросхемы процессора.
Важнейшие характеристики процессора:
- разрядность шины данных, определяет скорость работы системы;
- разрядность его шины адреса, определяет допустимую сложность системы;
- количество управляющих сигналов в шине управления; определяет разнообразие режимов обмена и эффективность обмена процессора с другими устройствами системы.
Чем больше тактовая частота процессора, тем он быстрее работает, то есть тем быстрее выполняет команды. Впрочем, быстродействие процессора определяется не только тактовой частотой, но и особенностями его структуры. Современные процессоры выполняют большинство команд за один такт и имеют средства для параллельного выполнения нескольких команд. Тактовая частота процессора имеет нижний и верхний пределы. При превышении верхнего предела частоты возможно перегревание процессора, а также сбои, причем, что самое неприятное, возникающие не всегда и нерегулярно. Так что с изменением этой частоты надо быть очень осторожным.
 Рисунок 2.4 – Схема включения процессора
Рисунок 2.4 – Схема включения процессора
После включения питания процессор переходит в первый адрес программы начального пуска и выполняет эту программу. Данная программа предварительно записана в постоянную (энергонезависимую) память. После завершения программы начального пуска процессор начинает выполнять основную программу, находящуюся в постоянной или оперативной памяти, для чего выбирает по очереди все команды. От этой программы процессор могут отвлекать внешние прерывания или запросы на ПДП. Команды из памяти процессор выбирает с помощью циклов чтения по магистрали. При необходимости процессор записывает данные в память или в устройства ввода/вывода с помощью циклов записи или же читает данные из памяти или из устройств ввода/вывода с помощью циклов чтения.
Таким образом, основные функции любого процессора следующие:
- выборка (чтение) выполняемых команд;
- ввод (чтение) данных из памяти или устройства ввода/вывода;
- вывод (запись) данных в память или в устройства ввода/вывода;
- обработка данных (операндов), в том числе арифметические операции над ними;
- адресация памяти, то есть задание адреса памяти, с которым будет производиться обмен;
- обработка прерываний и режима прямого доступа.
Упрощенно структуру микропроцессора можно представить в следующем виде (рис. 2.5).
 Рисунок 2.5 – Внутренняя структура микропроцессора.
Рисунок 2.5 – Внутренняя структура микропроцессора.
Основные функции узлов процессора приведены ниже.
Схема управления выборкой команд выполняет чтение команд из памяти и их дешифрацию. В первых микропроцессорах было невозможно одновременное выполнение предыдущей команды и выборка следующей команды, так как процессор не мог совмещать эти операции. В современных процессорах используется так называемый конвейер (очередь) команд, позволяющий выбирать несколько следующих команд, пока выполняется предыдущая. Конвейер представляет собой небольшую внутреннюю память процессора, в которую при малейшей возможности (при освобождении внешней шины) записывается несколько команд, следующих за исполняемой. Эти процессы идут параллельно, что ускоряет работу процессора. Правда, если выполняемая команда предполагает переход не на следующую ячейку памяти, а на удаленную (с меньшим или большим адресом), конвейер не помогает, и его приходится сбрасывать.
Развитием идеи конвейера стало использование внутренней кэш-памяти процессора, которая заполняется командами и данными которые необходимо обработать, пока процессор занят выполнением предыдущих команд. Чем больше объем кэш-памяти, тем меньше вероятность того, что ее содержимое придется сбросить при команде перехода. Обрабатывать команды, находящиеся во внутренней памяти, процессор может гораздо быстрее, чем те, которые расположены во внешней памяти. В кэш-памяти могут храниться и данные, которые обрабатываются в данный момент, это также ускоряет работу.
Арифметико-логическое устройство (АЛУ или ALU) предназначено для обработки информации в соответствии с полученной процессором командой. Примерами обработки могут служить логические операции (типа логического "И", "ИЛИ", "Исключающего ИЛИ" и т.д.) то есть побитные операции над операндами, а также арифметические операции (типа сложения, вычитания, умножения, деления и т.д.).
Быстродействие АЛУ во многом определяет производительность процессора. Причем важна не только частота тактового сигнала, которым тактируется АЛУ, но и количество тактов, необходимое для выполнения той или иной команды. Для повышения производительности разработчики стремятся довести время выполнения команды до одного такта, а также обеспечить работу АЛУ на возможно более высокой частоте. Один из путей решения этой задачи состоит в уменьшении количества выполняемых АЛУ команд (так называемые RISC-процессоры). Другой путь повышения производительности процессора – использование нескольких параллельно работающих АЛУ.
Для операций над числами с плавающей точкой и других специальных сложных операций используется специальные вычислители – математические сопроцессоры, которые входят в структуру МП как составная часть.
Схема управления прерываниями обрабатывает поступающий на процессор запрос прерывания, определяет адрес начала программы обработки прерывания (адрес вектора прерывания), обеспечивает переход к этой программе после выполнения текущей команды и сохранения в памяти (в стеке) текущего состояния регистров процессора. По окончании программы обработки прерывания процессор возвращается к прерванной программе с восстановленными из памяти (из стека) значениями внутренних регистров.
Схема управления прямым доступом к памяти служит для временного отключения процессора от внешних шин и приостановки работы процессора на время предоставления прямого доступа запросившему его устройству.
Логика управления организует взаимодействие всех узлов процессора, перенаправляет данные, синхронизирует работу процессора с внешними сигналами, а также реализует процедуры ввода и вывода информации.
Регистры процессора представляют собой по сути ячейки очень быстрой памяти и служат для временного хранения различных кодов: данных, адресов, служебных кодов. Операции с этими кодами выполняются предельно быстро, поэтому, в общем случае, чем больше внутренних регистров, тем лучше. На быстродействие процессора сильно влияет разрядность регистров. Именно разрядность регистров и АЛУ называется внутренней разрядностью процессора, которая может не совпадать с внешней разрядностью.
По отношению к назначению внутренних регистров существует два основных подхода. Первого придерживается, например, компания Intel, которая каждому регистру отводит строго определенную функцию. С одной стороны, это упрощает организацию процессора и уменьшает время выполнения команды, но с другой – снижает гибкость, а иногда и замедляет работу программы. Например, некоторые арифметические операции и обмен с устройствами ввода/вывода проводятся только через один регистр – аккумулятор, в результате чего при выполнении некоторых процедур может потребоваться несколько дополнительных пересылок между регистрами. Второй подход состоит в том, чтобы все (или почти все) регистры сделать равноправными, как, например, в 16-разрядных процессорах Т-11 фирмы DEC. При этом достигается высокая гибкость, но необходимо усложнение структуры процессора. Существуют и промежуточные решения, в частности, в процессоре MC68000 фирмы Motorola половина регистров использовалась для данных, и они были взаимозаменяемы, а другая половина – для адресов, и они также взаимозаменяемы.
Внутренние регистры любого микропроцессора обязательно выполняют две служебные функции:
- определяют адрес в памяти, где находится выполняемая в данный момент команда (функция счетчика команд или указателя команд);
- определяют текущий адрес стека (функция указателя стека).
В разных процессорах для каждой из этих функций может отводиться один или два внутренних регистра. Эти два указателя отличаются от других не только своим специфическим, служебным, системным назначением, но и особым способом изменения содержимого. Их содержимое программы могут менять только в случае крайней необходимости, так как любая ошибка при этом грозит нарушением работы компьютера, зависанием и порчей содержимого памяти.
Содержимое указателя (счетчика) команд изменяется следующим образом. В начале работы системы (при включении питания) в него заносится раз и навсегда установленное значение. Это первый адрес программы начального запуска. Затем после выборки из памяти каждой следующей команды значение указателя команд автоматически увеличивается (инкрементируется) на единицу (или на два в зависимости от формата команд и типа процессора). То есть следующая команда будет выбираться из следующего по порядку адреса памяти. При выполнении команд перехода, нарушающих последовательный перебор адресов памяти, в указатель команд принудительно записывается новое значение – новый адрес в памяти, начиная с которого адреса команд опять же будут перебираться последовательно. Такая же смена содержимого указателя команд производится при вызове подпрограммы и возврате из нее или при начале обработки прерывания и после его окончания.
Регистр признаков (регистр состояния) содержит слово состояния процессора (ССП, PSW – Processor Status Word). Каждый бит этого слова (флаг) содержит информацию о результате предыдущей команды. Эти биты (флаги) используются командами условных переходов. В этом же регистре иногда содержатся флаги управления, определяющие режим выполнения некоторых команд.
Таким образом, в ходе работы процессора схема выборки команд выбирает последовательно команды из памяти, затем эти команды выполняются, причем в случае необходимости обработки данных подключается АЛУ. На входы АЛУ могут подаваться обрабатываемые данные из памяти или из внутренних регистров. Во внутренних регистрах хранятся также коды адресов обрабатываемых данных, расположенных в памяти. Результат обработки в АЛУ изменяет состояние регистра признаков и записывается во внутренний регистр или в память (как источник, так и приемник данных указывается в составе кода команды). При необходимости информация может переписываться из памяти (или из устройства ввода/вывода) во внутренний регистр или из внутреннего регистра в память (или в устройство ввода/вывода).
2.3.1. Методы адресации данных и команд процессором
Основная функция любого процессора, ради которой он и создается, – это выполнение команд. Система команд определяет логику работы процессора и его реакцию на те или иные комбинации внешних событий.
Каждая команда, выбираемая (читаемая) из памяти процессором, определяет алгоритм поведения процессора на ближайшие несколько тактов.
Код команды говорит о том, какую операцию предстоит выполнить процессору и с какими операндами (то есть кодами данных), где взять исходную информацию для выполнения команды и куда поместить результат (если необходимо). В процессоре код команды расшифровывается и преобразуется в набор микроопераций, выполняемых отдельными узлами процессора.
Большая часть команд процессора работает с кодами данных (операндами). Одни команды требуют входных операндов (одного или двух), другие выдают выходные операнды (чаще один операнд). Входные операнды называются еще операндами-источниками, а выходные называются операндами-приемниками. Все эти коды операндов (входные и выходные) могут находиться во внутренних регистрах процессора (наиболее удобный и быстрый вариант) или располагаться в системной памяти (самый распространенный вариант). Наконец, они могут находиться в устройствах ввода/вывода (наиболее редкий случай). Определение места положения операндов производится кодом команды.
Существуют разные методы, с помощью которых код команды может определить, откуда брать входной операнд и куда помещать выходной операнд. Эти методы называются методами адресации. Эффективность выбранных методов адресации во многом определяет эффективность работы всего процессора в целом.
Количество методов адресации в различных процессорах может быть от 4 до 16. Рассмотрим несколько типичных методов адресации операндов, используемых сейчас в большинстве микропроцессоров.
Непосредственная адресация (рис. 2.6) предполагает, что операнд (входной) находится в памяти непосредственно за кодом команды. Операнд обычно представляет собой константу, которую надо куда-то переслать, к чему-то прибавить и т.д. Например, команда может состоять в том, чтобы прибавить число 6 к содержимому какого-то внутреннего регистра процессора. Это число 6 будет располагаться в памяти, внутри программы в адресе, следующем за кодом данной команды сложения.
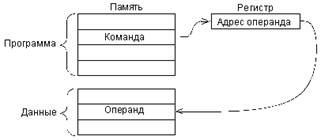
Прямая (она же абсолютная) адресация (рис. 2.7) предполагает, что операнд (входной или выходной) находится в памяти по адресу, код которого находится внутри программы сразу же за кодом команды. Например, команда может состоять в том, чтобы очистить (сделать нулевым) содержимое ячейки памяти с адресом 1000000. Код этого адреса 1000000 будет располагаться в памяти, внутри программы в следующем адресе за кодом данной команды очистки.
|
|
|
|
Рисунок 2.6 – Непосредственная адресация |
Рисунок 2.7 – Прямая адресация |
Регистровая адресация (рис. 2.8) предполагает, что операнд (входной или выходной) находится во внутреннем регистре процессора. Например, команда может состоять в том, чтобы переслать число из нулевого регистра в первый. Номера обоих регистров (0 и 1) будут определяться кодом команды пересылки.
Косвенно-регистровая (косвенная) адресация предполагает, что во внутреннем регистре процессора находится не сам операнд, а его адрес в памяти (рис. 2.9). Например, команда может состоять в том, чтобы очистить ячейку памяти с адресом, находящимся в нулевом регистре. Номер этого регистра (0) будет определяться кодом команды очистки.
|
|
|
|
Рисунок 2.8 – Регистровая адресация |
Рисунок 2.9 – Косвенная адресация |

Реже встречаются еще два метода адресации.
Автоинкрементная адресация очень близка к косвенной адресации, но отличается от нее тем, что после выполнения команды содержимое используемого регистра увеличивается на единицу или на два. Этот метод адресации очень удобен, например, при последовательной обработке кодов из массива данных, находящегося в памяти. После обработки какого-то кода адрес в регистре будет указывать уже на следующий код из массива.
Автодекрементная адресация работает похоже на автоинкрементную, но только содержимое выбранного регистра уменьшается на единицу или на два перед выполнением команды. Эта адресация также удобна при обработке массивов данных. Совместное использование автоинкрементной и автодекрементной адресаций позволяет организовать память стекового типа.
Отметим, что выбор того или иного метода адресации в значительной степени определяет время выполнения команды. Самая быстрая адресация – это регистровая, так как она не требует дополнительных циклов обмена по магистрали. Если же адресация требует обращения к памяти, то время выполнения команды будет увеличиваться за счет длительности необходимых циклов обращения к памяти. Понятно, что чем больше внутренних регистров у процессора, тем чаще и свободнее можно применять регистровую адресацию, и тем быстрее будет работать система в целом.
2.3.2. Система команд процессора
В общем случае система команд процессора включает в себя четыре основные группы команд.
Команды пересылки данных пересылают операнды (копируют) из источника (Source) в приемник (Destination) не требуя выполнения никаких операций над ними. Источником и приемником могут быть внутренние регистры процессора, ячейки памяти или устройства ввода/вывода. АЛУ в данном случае не используется.
К командам пересылки данных относятся:
- загрузка (запись) содержимого во внутренние регистры процессора;
- сохранение в памяти содержимого внутренних регистров процессора;
- копирование содержимого из одной области памяти в другую;
- запись в устройства ввода/вывода и чтение из устройств ввода/вывода.
Арифметические команды выполняют операции сложения, вычитания, умножения, деления, увеличения на единицу (инкрементирования), уменьшения на единицу (декрементирования) и т.д. Этим командам требуется один или два входных операнда. Формируют команды один выходной операнд.
К арифметическим командам относятся:
- команды операций с фиксированной запятой (сложение, вычитание, умножение, деление);
- команды операций с плавающей запятой (сложение, вычитание, умножение, деление);
- команды очистки;
- команды инкремента ( +1) и декремента ( -1);
- команда сравнения.
Логические команды производят над операндами логические операции, например, логическое И, логическое ИЛИ, исключающее ИЛИ, очистку, инверсию, разнообразные сдвиги (вправо, влево, арифметический сдвиг, циклический сдвиг). Этим командам, как и арифметическим, требуется один или два входных операнда, и формируют они один выходной операнд.
К логическим командам относятся:
- логическое И, логическое ИЛИ, сложение по модулю 2 (Исключающее ИЛИ);
- логические, арифметические и циклические сдвиги;
- проверка битов и операндов;
- установка и очистка битов (флагов) регистра состояния процессора (PSW).
Команды переходов предназначены для изменения обычного порядка последовательного выполнения команд. С их помощью организуются переходы на подпрограммы и возвраты из них, всевозможные циклы, ветвления программ, пропуски фрагментов программ и т.д. Команды переходов всегда меняют содержимое счетчика команд. Переходы могут быть условными и безусловными. Именно эти команды позволяют строить сложные алгоритмы обработки информации.
К командам переходов относятся:
- команды безусловных переходов;
- команды условных переходов.
В соответствии с результатом каждой выполненной команды устанавливаются или очищаются биты регистра состояния процессора (PSW). Но надо помнить, что не все команды изменяют все имеющиеся в PSW флаги. Это определяется особенностями каждого конкретного процессора.
У разных процессоров системы команд существенно различаются, но в основе своей они очень похожи. Количество команд у процессоров также различно. Например, у процессора МС68000 всего 61 команда, а у процессора 8086 – 133 команды. У современных мощных процессоров количество команд достигает нескольких сотен. В то же время существуют процессоры с сокращенным набором команд (так называемые RISC-процессоры), в которых за счет максимального сокращения количества команд достигается увеличение эффективности и скорости их выполнения.