4.1. Особенности временной коммутации каналов
4.3. Этапы структурного синтеза МВК
4.3.1. Определение необходимого объема памяти
4.3.3. Обеспечение временных параметров и быстродействия МВК
4.1. Особенности временной коммутации каналов
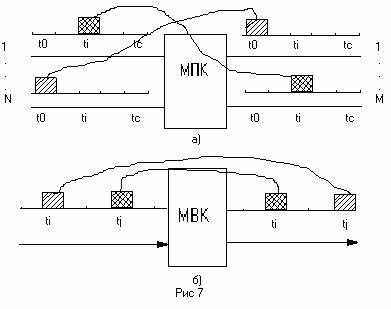 |
Коммутация цифровых каналов во времени состоит в обеспечении возможности передачи информации, поступающей в одном временном интервале ti , в течение другого временного интервала tj. Поскольку моменты поступления и выдачи информации разнесены во времени, то процесс коммутации обязательно включает хранение информации в течение времени
Цифровые каналы организуются в четырехпроводных трактах передачи, поэтому следует иметь в виду, что при временной коммутации устанавливается полное дуплексное соединение, которое обеспечивает информационный обмен в обоих направлениях передачи.
4.2. Режимы работы МВК
Функция хранения информации в МВК современных цифровых систем коммутации реализуется с помощью запоминающего устройства с произвольным (прямым) доступом к хранимым данным. Это ЗУ и соответственно МВК может работать в двух режимах: первый - последовательной (циклической) записи и произвольной выборки (ациклического чтения); второй - произвольной записи и последовательной выборки. Первый режим обозначают(→↓;↕→) , второй - (→↕;↓→) В первом случае входящий цифровой тракт заводится на информационные шины (ШИ) МВК, и информация, поступающая по цифровым каналам, последовательно записывается в ячейки ЗУ, начиная с первой; при этом обычно номер ячейки соответствует номеру временного интервала в цикле системы передачи, занимаемому цифровым каналом. Адреса записиАс поступают на шину адреса ША обычно от счетчика каналов.
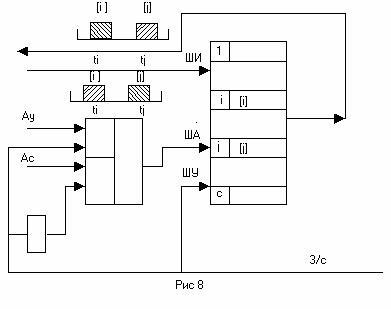 |
При произвольной выборке реализуется обращение к определенной ячейке ЗУ, адрес Ау которой вырабатывает управляющее устройство. Процесс временной коммутации канала ki с каналом kj протекает следующим образом. В режиме записи на ША от счетчика адресов в течение интервала ti поступает адрес 1-й ячейки, в которую записывается информация, передаваемая в канале ki , а в течение tj - адрес j-ой, в которую записывается информация, передаваемая в канале kj. B режиме чтения на ША из УУ в течение интервала ti поступает адрес j-й ячейки, и записанная в ней информация списывается в канал ki . Аналогично в течение интервала tj на ША из УУ поступает адрес с i-и ячейки, и записанная в ней информация списывается в канал kj. Таким образом, осуществляется взаимный обмен информацией каналов ki и kj , т.е. устанавливается полное дуплексное соединению (рис. 8).
В режме (→↕;↓→) адреса записи вырабатываются управляющим устройством, и информация, поступающая в следующих друг за другом каналах входящего тракта, записывается в общем случае не в последовательно расположенные ячейки , а в те , которые соответствуют коммутируемым каналам исходящего тракта. При чтений ЗУ адреса обращения вырабатываются счетчикому и содержимое всех ячеек памяти, начиная с первой, последовательно считывается в соответствующие по номеру каналы исходящего тракта. Процесс коммутации канала ki и kj протекает следующим образом. В режиме записи в течение интервала ti на ША из УУ поступает адрес j-й ячейки, в которую записывается информация канала ki. Соответственно в течение интервала tj на ША поступает адрес i-й ячейки, в которую записывается информация канала kj. При чтении информация j-й ячейки будет считана в интервале tj, a i-й - в интервале ti . Таким образом, устанавливается полное дуплексное соединение двух цифровых каналов.
Выбор режима работы ВК определяется на этапе системного проектирования .
4.3. Этапы структурного синтеза МВК
Реализация процесса временной коммутации цифровых каналов сводится к определению необходимого объема памяти, выбору типа ОЗУ из номенклатуры выпускаемых промышленностью, организации памяти, учету требований к быстродействию модуля, выбору способа ввода/вывода информации в память МВК.
4.3.1. Определение необходимого объема памяти
Определение необходимого объема памяти производят, исходя из числа цифровых каналов, организуемых в тракте; длины кодового слова, передаваемого в одном канале, а также режима работы МВК. Если число каналов входящего и исходящего трактов С1 и С2 соответственно, то необходимый объем ЗУ (в битах)
в режиме (→↓;↕→) : V*= C1 1,
в режиме (→↕;↓→) : V**= С2 1.
Следует заметить, что в общем случае объем памяти можно определять, исходя из максимальной мощности тракта передачи, имея в виду возможность реализации любого режима. С другой стороны, это может оказаться целесообразным, если учесть, что в таком случае мы получаем возможность построения различных альтернативных решений при синтезе структуры коммутационного поля: введение концентрации или расширения, построение полнодоступной или неполнодоступной схемы и т.д.
Для иллюстрации приведем пример. Пусть требуется построить МВК без сжатия и расширения, по полнодоступной схеме, который должен выполнять временную коммутацию каналов системы передачи ИКМ-120. Известно, что длина слова в канале ИКМ-120 l=8, мощность системы С =120 информационных каналов, следовательно, необходимый объем памяти составит V=120 х 8=960, бит.
4.3.2. Организация памяти
На этом этапе решается задача построения ОЗУ БВК заданного объема на основе стандартных полупроводниковых ЗУ, выпускаемых промышленностью. В цифровых системах коммутации находят применение полупроводниковые ЗУ с произвольной выборкой различной емкости, начиная с ЗУ на элементах средней степени интеграции типа K-I55 РУ-2 16x4 до ЗУ на БИС-одно- и многокристальных. В системах используются как статические, так и динамические ЗУ. В статических ЗУ в качестве элементов памяти используются триггерные схемы различных типов, объединяемые в некоторую регулярную структуру, управляемую сигналом записи/считывания (3/С) и сигналом выбора кристалла (ВК). Чтение и запись информации происходит по адресу, поступающему в ЗУ по адресным шинам. Расшифровка адреса выполняется в дешифраторе, который обычно реализуется в том же кристалле, что и ЗУ. В современных динамических ЗУ в качестве элемента памяти используется емкость затвор-канал МОП-транзистора, которая при записи информации заряжается. Однако время хранения заряда невелико (порядка 10-3 ), поэтому требуется периодический ее подзаряд, т.е. регенерация записанной информации. Этот процесс выполняется под действием внешних тактовых импульсов, причем схемы регенерации могут быть как вынесенными, так и совмещенными на одном кристалле с матрицей памяти. При пропадании тактовых импульсов информация в ЗУ разрушается. Как известно, реализация элемента памяти в статическом ЗУ обходится вдвое дороже по количеству транзисторов, чем динамические ЗУ, которые к тому же обладают более высоким быстродействием и меньшей потребляемой мощностью (всего несколько мкВт/бит). Однако необходимость реализации схем регенерации в динамических ОЗУ обычно ограничивает эффективность использования их только для ЗУ большой емкости. Поэтому для ЗУ малой и средней емкости обычно используются статические ЗУ.Однако оба типа ЗУ обладают общим существенным недостатком - разрушением информации при отключении источников питания.
Каждое ЗУ имеет адресные шины ША, по которым поступает адрес ячейки памяти; входные информационные шины ШИ, по которым поступает информация для записи в память; выходные ШИ, по которым информация выдается из памяти, и сигналы управления: сигнал запись/считиваяие (3/С), определяющий режим работы ЗУ; сигнал выбора кристалла (ВК), используемый при организации нескольких блоков ЗУ, связанных общей выходной шиной; и предназначенный для отключения в случае необходимости данного субблока ЗУ от общей шины. В динамическом ЗУ, кроме того, имеется управляющий сигнал синхронизации "СИНХ", который используется, во-первых, для заряда выходных емкостей перед чтением информации и, во-вторых, для синхронизации сигнала ВК.
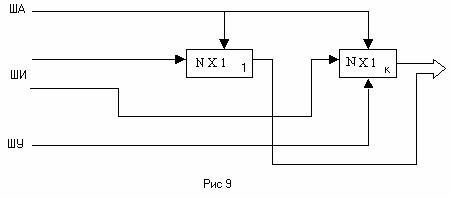 |
В общем случае ЗУ может иметь несколько управляющих сигналов ВК, но при наличии одного ВК обращение к ЗУ происходит, если ВК = 1, и заблокировано, если ВК = 0. Сигнал 3/С - дуальный: если он присутствует, т.е. 3/С = 0, то ЗУ находится в режиме записи; если нет, т.е. 3/С =1, то ЗУ находится в режиме считывания (хранения). В обоих режимах (записи и считывания) адресные сигналы подаются до поступления управляющих сигналов ВК и 3/С. В табл. 4 приведены характеристики некоторых типов ОЗУ. Как видно, на одном БИС ЗУ реализуется некоторое конечное число однобитовых слов (от 0,25 к до 16 к), т.е. память имеет структуру Nxl) бит. Поэтому для образования требуемой длины слова хранения необходимо выбрать число БИС, равное числу разрядов слова. На рис. 9 приведен пример организации памяти для случая хранения k -разрядного слова и общей емкости (N![]() k) бит. Совокупность k одноразрядных выходных шин данных всех БИС ЗУ образует k-разрядную шину данных системы памяти. Для реализации одновременного обращения ко всем k БИС ОЗУ и ША. и ШУ всех БИС запараллеливаются.
k) бит. Совокупность k одноразрядных выходных шин данных всех БИС ЗУ образует k-разрядную шину данных системы памяти. Для реализации одновременного обращения ко всем k БИС ОЗУ и ША. и ШУ всех БИС запараллеливаются.
При построении БВК цифровых систем коммутации может возникнуть необходимость в построении ЗУ с числом слов, большим N. В этом случае используется страничная организация памяти. Каждый субблок системы N![]() K образует "страницу" памяти, к которой адресуются по шине ШA, по которой поступает адрес страницы-субблока. Выборка требуемого слова памяти производится по адресу, поступающему на шины адреса ША каждого субблока. Для того, чтобы отключить от общей шины ШИ невыбранные субблоки, используется сигнал выбор кристалла (ВК), который управляет трехстабильной схемой ввода/вывода на каждом кристалле ЗУ, переводя ее в третье состояние, называемое состоянием разомкнутой цепи или высокого сопротивления.
K образует "страницу" памяти, к которой адресуются по шине ШA, по которой поступает адрес страницы-субблока. Выборка требуемого слова памяти производится по адресу, поступающему на шины адреса ША каждого субблока. Для того, чтобы отключить от общей шины ШИ невыбранные субблоки, используется сигнал выбор кристалла (ВК), который управляет трехстабильной схемой ввода/вывода на каждом кристалле ЗУ, переводя ее в третье состояние, называемое состоянием разомкнутой цепи или высокого сопротивления.
Таблица 4
|
Тип микро-схемы п/п 0ЗУ |
Технология |
Информа ционная емкость, слов х разрядов |
Длина адрес-ного слова, бит |
Время обра-щения,нс |
Напряже-ние пи-тания, В |
Потребляе-мая мощ-ность, мВт |
|
КI55РУ5 |
ТТЛ |
256 |
8 |
60 |
5 |
700 |
|
КI88РУ2А |
ТТЛ |
256 |
8 |
500 |
5 |
стат:250 дин:500 |
|
КI76РУ2 |
К-МОП |
256 |
8 |
550 |
||
|
К500РУ410 |
ЭСЛ |
256 |
8 |
25 |
-5, 2 |
750 |
|
К500РУ415 |
ЭСЛ |
1024 |
10 |
30 |
-5, 2 |
730 |
|
КР565РУ2А |
п-МОП |
1024 |
10 |
400 |
12;5;-5 |
300 |
|
КI55РУ1А |
ТТЛ |
2048 |
11 |
400 |
5 |
|
|
КР565РУ1А |
п-МОП |
4096 |
12 |
200 |
12;5;-5 |
3;0,25;0,125 |
|
КI55РУ1Б |
ТТЛ |
4096 |
12 |
400 |
5 |
|
|
КР541РУ31 |
ЭСЛ |
8192 |
13 |
150 |
5 |
550 |
|
КР541РУ3 |
ЭСЛ |
16384 |
14 |
150 |
5 |
550 |
4.3.3. Обеспечение временных параметров и быстродействия МВК
На этом этапе решается задача выбора необходимых средств и методов для обеспечения динамических характеристик МВК. В настоящее время существует ряд подходов к построению МВК, которые обусловлены различными возможностями разработчиков по использованию элементной базы. Дело в том, что одним из основных требований к ЗУ, на основе которых строится МВК, является время цикла (обращения) памяти, определяющее частоту работы ЗУ. Реализация процесса временной коммутации в МБК требует двух обращений к памяти в течение одного временного интервала для каждого входящего и исходящего каналов. Следовательно, если цикл системы передачи равен Тц, а число организованных в нем каналов С, то время обращения у ЗУ (длительность цикла памяти) τ≤Тц/2С. Это позволяет осуществить выбор требуемого БИС ЗУ для БВК, исходя из требований коммутации. С другой стороны, если известен цикл системы передачи Тц и задан тип ЗУ, то можно определить максимальное число каналов, которое может обслужить БВК при заданном быстродействии ЗУ – τ: С≤Тц/2 τ.
Пусть, например, БВК должен осуществить коммутацию цифровых каналов, образованных на базе ИКМ, с временем цикла Тц = 125 мкс и для его построения используется ЗУ с временем обращения τ = 560 нс, тогда определяем
С≤![]() =
= ![]() = 125 каналов.
= 125 каналов.
Таким образом, БВК может обслужить 125 дуплексных каналов и установить 62 дуплексных соединения.
С другой стороны, если БВК должен обслуживать 480 цифровых каналов с
Тц = 125 мкс, то он может быть построен на ЗУ, у которого
τ ≤![]() =
= ![]() = 0,130 , мкс.
= 0,130 , мкс.
Например, для построения БВК можно выбрать БИС К500РУ415 1024x1 с временем цикла 30 нс или К155РУ5 256x1 с временем цикла 60 нс.
Как вытекает из рассмотренных выше примеров, требования к быстродействию БВК являются достаточно жесткими и для их удовлетворения необходимо либо выбирать соответствующую элементную базу с высокими показателями по быстродействию, либо применять структурные методы.
Одним из таких методов является метод двойной памяти, суть которого состоит в том, что для обеспечения непрерывного действия МВК его память удваивают, вводя два идентичных блока ЗУ; моменты записи и считывания в каждый блок разносят во времени так, что во время записи информации в один блок из другого ведут считывание.
При решении задачи структурного синтеза МВК в реальных цифровых системах коммутации чаще всего используют именно этот метод двойной памяти, что позволяет существенно снизить требования по быстродействию к элементной базе. Если учесть, что, например, используемые на телефонных сетях системы
МТ 20/25 и АТСЭ-200 были разработаны в семидесятые годы, то, естественно, обеспечение требуемых временных параметров системы в части скорости коммутации достигалось за счет определенных аппаратных затрат.
На рис. 10 приведена функциональная схема МВК, построенная по методу двойной памяти. Она включает коммутаторы шин адреса КША1 и KША2, каждый из которых обеспечивает коммутацию адресных шин ОЗУ МВК с выходами Aс счетчика адресов при записи в ОЗУ и с выходами Ау периферийного управляющего устройотва при считывании из ОЗУ.
Сигнал управления 3/С определяет работу пары идентичных ОЗУ. При его поступлении в ОЗУ1 начинается запись в него информации, передаваемой в цифровых каналах тракта передачи, заведенного на информационные шины (ШИ) и ОЗУ1 и ОЗУ2. Одновременно инверсия сигнала 3/С управляет считыванием из ОЗУ2 информации, которая была занесена в него в предыдущем цикле передачи. При изменении значения сигнала 3/С происходит соответствующее изменение режима работы ОЗУ1 и ОЗУ2: ОЗУ2 начинает накапливать информацию, поступающую в цифровых каналах входящего тракта передачи, а ОЗУ1 - считывать информацию в исходящий тракт. Очевидно, что для исключения потери информации при использовании метода двойной памяти скорость переключения сигнала 3/С должна быть не меньше частоты следования циклов, т.е.
Как видим, помимо снижения требования к быстродействию элементов, использование метода двойной памяти позволяет: fЗ/С≥1/Тц.
обеспечить простоту реализации МБК;
довести скорость работы ОЗУ МВК до скорости, равной скорости цифрового потока системы передачи.
Эти возможности метода и привлекли разработчиков систем коммутации к его использованию. Однако метод двойной памяти имеет ряд недостатков. Первый состоит в том, что при реализации МВК по такой схеме необходимо особое внимание уделять синхронизации работы ОЗУ, поскольку МВК поставлен в жесткие временные рамки.
Второй недостаток связан с тем, что коммутация в таком МВК сопровождается дополнительной задержкой информации: τзад ≤ 2ТЦ.
И, наконец, третий недостаток связан с аппаратными затратами: удвоением минимально необходимого объема памяти.
Тем не менее метод двойной памяти получил распространение в цифровых системах коммутации.
4.3.4. Выбор способа ввода/вывода информации в память МВК
Информация, передаваемая по цифровым каналам, поступает на МВК в виде цифрового потока, при этом запись ее в память в общем случае можно осуществлять по мере поступления, если имеются соответствующие ресурсы о необходимым быстродействием. Однако, учитывая жесткие временные ограничения на работу МВК и возможности имеющейся элементной базы, чаще всего осуществляют переход из последовательной формы передачи информации в параллельную на входе МВК и обратное преобразование на выходе. Для реализации этого преобразования обычно используют сдвигающие регистры. Поскольку для накопления в регистре всей информации, поступающей в течение цикла в данном канале ki, затрачивается весь интервал времени ti, то, очевидно, считывание информации из регистра для последующей записи в ОЗУ МВК возможно только в следующий интервал времени tj. Таким образом, последовательно-параллельное преобразование влечет за собой потерю времени передачи, т.е. задержку информации. Для ее компенсации обычно используют пару сдвигающих регистров и организуют их работу так, что пока идет запись и накопление информации в один, из другого идет в это время считывание.
Переход к использованию в цифровых системах коммутации БИС памяти со структурой Nх1 привел к новым подходам к синтезу МВК, в том числе в части способа ввода-вывода информации в память. На рис. 11 приведена функциональная схема МВК на ОЗУ с однобитовыми ячейками, запись информации в которое осуществляется последовательно бит за битом по мере поступления цифрового потока передачи на вход МВК. При таком подходе необходимость в послетовательно-параллельном преобразовании сигналов, передаваемых по цифровым каналам, отпадает. Управляющий сигпал 3/С (по существу синхронизироваяная тактовая последовательность) открывает процесс записи информации из входящего цифрового информациовного тракта во входной регистр RGA. Под действием сигнала З/С происходит запись информационного бита кодовой комбинации i-го канала входящего тракта в RGA. Одновременно под действием этого же сигнала 3/С при условии поступления адресного сигнала Aу из периферийного управляющего устройства происходит считывание информации из ОЗУ и запись информационного бита кодовой комбинации j-го канала в RGВ. При изменении значения сигнала 3/С и при условии поступления адресного сигнала Ао из счетчика адресов в ОЗУ под действием инверсированного сигнала З/С происходит перезапись того же бита из RGA в ячейку памяти ОЗУ. Затем вновь при
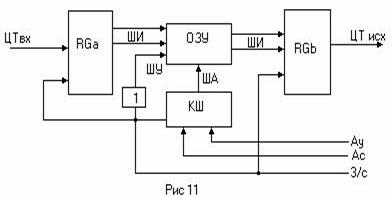 |
изменении значения сигнала З/С происходит запись следующего бита кодовой комбинации i-го в RGA и перезапись из ОЗУ в RGA следующего бита j -го канала. Процесс коммутации продолжается аналогично для всех каналов тракта передачи. Очевидно, при таком построении МВК и последовательном способе ввода информации частота переключения сигнала З/С должна быть по крайней мере в 2 раза больше скорости следования информационных бит тракте передачи: fЗ/С≥2/τбит. Для примера, если цифровой тракт образован на базе системы передачи ИКМ-120 с общим числом каналов C1 = 128, то имеем (в упрощенном варианте):
Тц=125 мкс,
tкан= ![]() =
=![]() = 0,98 = 980 нс
= 0,98 = 980 нс
τбит = ![]() =
=![]() =125 нс
=125 нс
![]() =
=![]() = 16,39 МГц
= 16,39 МГц
fЗ/С≥16,39 МГц
Таким образом, последовательный способ ввода информации при использовании ОЗУ с однобитовыми ячейками позволяет обеспечить минимальную задержку информации и требует минимального объема памяти. Однако реализация МВК по такой схеме, как можно ожидать, окажется достаточно сложной, при этом временной режим МВК становится более жестким, поскольку требуемая скорость работы ОЗУ должна превышать скорость цифрового потока по крайней мере в 2 раза. Это существенно увеличивает требования по быстродействию к используемой элементной базе.