Задача оптимальной фильтрации непрерывного сигнала ставится следующим образом: требуется так обработать принятый сигнал x(t)=s(t)+![]() (t), чтобы получить на выходе приемника сигнал y(t), наименее отличающийся от переданного сигнала s(t). Математическое решение этой задачи было дано А. Н. Колмогоровым и Н. Винером. Теория Колмогорова—Винера базируется на трех основных предположениях: 1) сигнал s(t) и помеха
(t), чтобы получить на выходе приемника сигнал y(t), наименее отличающийся от переданного сигнала s(t). Математическое решение этой задачи было дано А. Н. Колмогоровым и Н. Винером. Теория Колмогорова—Винера базируется на трех основных предположениях: 1) сигнал s(t) и помеха ![]() (t) представляют собой стационарные случайные процессы; 2) операция фильтрации предполагается линейной; 3) критерием оптимальности считается минимум среднеквадратической ошибки.
(t) представляют собой стационарные случайные процессы; 2) операция фильтрации предполагается линейной; 3) критерием оптимальности считается минимум среднеквадратической ошибки.
Пусть сигнал s(t) и шум ![]() (t) являются независимыми случайными процессами с известными корреляционными функциями Bs(t) и Bw(
(t) являются независимыми случайными процессами с известными корреляционными функциями Bs(t) и Bw(![]() ), a x(t) — сигнал на входе линейного фильтра с импульсной характеристикой g(t). Требуется найти такую функцию g(t), чтобы сигнал на выходе фильтра y(t) минимизировал среднеквадратическую ошибку
), a x(t) — сигнал на входе линейного фильтра с импульсной характеристикой g(t). Требуется найти такую функцию g(t), чтобы сигнал на выходе фильтра y(t) минимизировал среднеквадратическую ошибку
![]()
Требование физической реализуемости фильтра, как известно, сводится к тому, что импульсная реакция фильтра должна удовлетворять условию g(t)=0 для всех t<0. Это ограничение учитывается в записи
![]()
где область интегрирования ![]() для физически реализуемого фильтра есть интервал от 0 до
для физически реализуемого фильтра есть интервал от 0 до ![]() , а для нереализуемого фильтра — от
, а для нереализуемого фильтра — от ![]() до
до ![]()
Докажем вначале, что характеристика фильтра g(t) оптимальна тогда и только тогда, когда
![]() для
для ![]() из
из ![]() (4.54)
(4.54)
т. е. когда ошибка ![]() (t)=y(t)—s(t) некоррелирована со входным сигналом x(t) во все моменты времени в области
(t)=y(t)—s(t) некоррелирована со входным сигналом x(t) во все моменты времени в области ![]()
Пусть ![]() — импульсная характеристика оптимального фильтра, для которого справедливо условие (4.54), а для
— импульсная характеристика оптимального фильтра, для которого справедливо условие (4.54), а для ![]() — импульсная характеристика любого другого линейного фильтра. Отклики фильтров соответственно обозначим через y
— импульсная характеристика любого другого линейного фильтра. Отклики фильтров соответственно обозначим через y![]() (t
(t![]() ) и y
) и y![]() (t
(t![]() ) Тогда
) Тогда
![]()
Так как функция ![]() и
и ![]() (t) удовлетворяет (4.54), то
(t) удовлетворяет (4.54), то
![]()
Следовательно,
![]()
Очевидно это выражение будет минимальным, когда ![]() что и доказывает справедливость условия (4.54).
что и доказывает справедливость условия (4.54).
Представим соотношение (4.54) в виде ![]() отсюда получаем
отсюда получаем
![]()
или
![]() (4.55)
(4.55)
В случае, когда сигнал s(t) и помеха w(i) независимы, ур-ние (4.55) принимает вид
![]() (4.56)
(4.56)
Это интегральное уравнение является основным уравнением теории линейной фильтрации и называется уравнением Винера — Хопфа. Его решением является искомая функция g(t), минимизирующая среднеквадратическую ошибку ![]() 2.
2.
Уравнение (4.56) решается сравнительно просто, если ![]() , т. е. для нереализуемых фильтров. Для реализуемых фильтров задача существенно усложняется. Ниже приводится упрощенная теория линейной фильтрации [12, 13].
, т. е. для нереализуемых фильтров. Для реализуемых фильтров задача существенно усложняется. Ниже приводится упрощенная теория линейной фильтрации [12, 13].
Квадрат среднеквадратической ошибки может быть выражен через энергетический спектр ошибки:
 (4.57)
(4.57)
где![]() — энергетический спектр функции
— энергетический спектр функции ![]() (t)=y(t)—s(t—t
(t)=y(t)—s(t—t![]() ) ,t0 — время задержки сигнала.
) ,t0 — время задержки сигнала.
Определим сначала функцию корреляции ошибки

(4.58)
Так как преобразование Фурье, связывающее между собой B(![]() ) и
) и
G(![]() ) линейно, то для спектра ошибки имеем
) линейно, то для спектра ошибки имеем
![]() (4.59)
(4.59)
Выражение для Gу(![]() ) находим непосредственно по ф-ле (2.109):
) находим непосредственно по ф-ле (2.109):
![]()
Так как s(t) и ![]() (t) независимы, то
(t) независимы, то ![]() и
и ![]() Остается найти взаимные спектральные плотности Gsy и Gys. Согласно (2.8,1) имеем
Остается найти взаимные спектральные плотности Gsy и Gys. Согласно (2.8,1) имеем
![]() (4.60)
(4.60)
Но отклик фильтра y(t) выражается интегралом Дюамеля
 (4.61)
(4.61)
После подстановки (4.61) в выражение (4.60), учитывая, что ![]() и импульсная реакция фильтра g(t) связана с коэффициентом передачи К(i
и импульсная реакция фильтра g(t) связана с коэффициентом передачи К(i![]() ) парой, преобразований Фурье, получим
) парой, преобразований Фурье, получим

Так как К(i![]() ) =
) =![]() , тo
, тo ![]()
Энергетический спектр ![]() есть действительная величина, поэтому мнимый показатель экспоненты должен быть равен нулю, т. е.
есть действительная величина, поэтому мнимый показатель экспоненты должен быть равен нулю, т. е.
![]() (4.62)
(4.62)
Выражение (4.62) определяет фазовую характеристику оптимального фильтра. Итак,
![]()
Аналогично определяется ![]() Легко показать, что
Легко показать, что
![]()
Окончательно выражение (4.59) для спектра погрешности принимает вид ![]()
Теперь нужно найти такое значение К(![]() ), при котором среднеквадратическая погрешность
), при котором среднеквадратическая погрешность ![]() 2 (4.57) будет наименьшей. Для этого достаточно минимизировать G
2 (4.57) будет наименьшей. Для этого достаточно минимизировать G![]() . Перепишем выражение для
. Перепишем выражение для ![]() в виде
в виде

Первый член положителен и зависит от К(![]() ), второй член — заданная величина. Ясно, что наименьшее значение
), второй член — заданная величина. Ясно, что наименьшее значение ![]() будет иметь тогда, когда выражение в квадратных скобках будет равно нулю. При этом условии
будет иметь тогда, когда выражение в квадратных скобках будет равно нулю. При этом условии
![]()
или с учетом (4.62)
![]() (4.63).
(4.63).
При этом спектр ошибки
![]() (4.64).
(4.64).
а средний квадрат ошибки равен:
 (4.65).
(4.65).
Заметим, что сигнал может быть полностью отделен от помехи, т.е. ошибка будет равна нулю лишь при условии ![]() . Последнее означает, что спектры сигнала и помехи не перекрываются (рис. 4.12а). Если помеха отсутствует, то
. Последнее означает, что спектры сигнала и помехи не перекрываются (рис. 4.12а). Если помеха отсутствует, то ![]() ,
,![]() ,
, ![]() =1 т. е. фильтра не требуется.
=1 т. е. фильтра не требуется.
Фильтр с оптимальной характеристикой (4.63) пропускает колебание различных частот с тем меньшим весом, чем больше отношение ![]() при данной частоте. Например, если спектры сигнала и помехи перекрываются, как показано на рис. 4.126, то частотная характеристика фильтра должна иметь вид, показанный на том же рисунке пунктиром. Если отношение сигнала к помехе мало:
при данной частоте. Например, если спектры сигнала и помехи перекрываются, как показано на рис. 4.126, то частотная характеристика фильтра должна иметь вид, показанный на том же рисунке пунктиром. Если отношение сигнала к помехе мало:![]() то
то  т. е. погрешность очень велика и восстановление сигнала при помощи фильтрации становится невозможным.
т. е. погрешность очень велика и восстановление сигнала при помощи фильтрации становится невозможным.
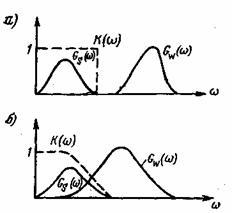
Рис. 4.12. Частотная характеристика оптимального фильтра: спектры сигнала и помехи не перекрываются (а), спектры сигнала и помехи перекрываются (б).
Можно получить лучший результат при фильтрации, если применить так называемое предыскажение. Передача с предыскажением состоит в том, что и на передающей стороне сигнал s(t) пропускается через фильтр с коэффициентом передачи![]() . Полученный таким образом видоизмененный сигнал передается по каналу. На приемной стороне ставится другой фильтр С коэффициентом передачи К
. Полученный таким образом видоизмененный сигнал передается по каналу. На приемной стороне ставится другой фильтр С коэффициентом передачи К![]() - Характеристики фильтров К
- Характеристики фильтров К![]() и К
и К![]() выбираются так, чтобы обеспечить минимум среднеквадратической ошибки. Расчеты показывают [12], что предыскажение дает тем больший выигрыш, чем меньше относительная ширина полосы перекрытия спектров сигнала и помехи
выбираются так, чтобы обеспечить минимум среднеквадратической ошибки. Расчеты показывают [12], что предыскажение дает тем больший выигрыш, чем меньше относительная ширина полосы перекрытия спектров сигнала и помехи