1. Сигналы в системах передачи
2.1. Общие характеристики сигналов
2.3. Телефонные (речевые) сигналы
3. Принципы формирования канального цифрового сигнала с ИКМ (см. PDH)
4. Системы передачи с линейным разделением каналов
5. Системы передачи с разделением каналов по частоте
5.1. Разделение каналов по частоте
5.2. Формирование канальных сигналов
5.3. Искажения в групповом тракте систем с частотным разделением
1. Сигналы в системах передачи
Существует много различных способов передачи сигналов. Так, два человека могут "связываться" между собой, пользуясь речью, жестами или графическими символами. В далеком прошлом передача на большие расстояния осуществлялась с помощью звуковых сигналов, барабана, дыма костра, почтовых голубей и световых лучей. Теперь связь на большие расстояния реализуется в основном с помощью электрических и оптических сигналов. Объясняется это тем, что сигналы данного вида можно передавать на огромные расстояния (теоретически на любые расстояния в пределах Вселенной) с очень большой скоростью (около 3х108 м/с).
Связь представляет собой процесс передачи сообщений от источника к получателю. Сообщением называют совокупность сведений о состоянии какого-либо материального объекта. Источник и получатель сообщений разделены некоторой средой, в которой источник образует возмущения, отображающие сообщение и воспринимаемые получателем.
Физическая реальность, изменения которой в пространстве и во времени отображают передаваемое сообщение, называется сигналом. Например, при разговоре источником сообщений является голосовой аппарат человека, в качестве сигнала выступает изменяющееся в пространстве и во времени воздушное давление - акустические волны; получателем служит человеческое ухо.
В современном обществе для передачи различного рода сообщений широко используются электрические сигналы - электромагнитные колебания, изменения параметров которых отображают передаваемые сообщения. Электрические сигналы имеют ряд преимуществ перед сигналами другой физической природы - они могут передаваться на весьма большие расстояния, их форму можно преобразовывать сравнительно простыми техническими средствами, скорость их распространения близка к скорости света. Передача, излучение и прием сообщений по электромагнитным системам называется электросвязью.
Существуют различные виды электросвязи - телефония, видеотелефония, телеграфия, передача данных и др. Комплекс технических средств, обеспечивающих передачу сигналов электросвязи, называется системой электросвязи. В пункте передачи такой системы сигналы неэлектрической природы, порождаемые источником сообщений, должны быть преобразованы в электрические сигналы; в пункте приема должно происходить обратное преобразование электрических сигналов в сигналы, воспринимаемые получателем. При этих преобразованиях должно соблюдаться взаимное соответствие между каждым из возможных сообщений и электрическим сигналом, переносящим это сообщение. Таким образом система электросвязи представляет собой комплекс разнообразных и, зачастую, весьма сложных, взаимодействующих между собой электротехнических и радиоэлектронных устройств, предназначенных для формирования, передачи и приема электромагнитных сигналов, переносящих сообщения любого вида. При передаче сигналы искажаются вследствие несовершенства (неидеальности характеристик) технических устройств; кроме того, на сигналы накладываются помехи, являющиеся сторонними возмущениями различного происхождения и мешающие точному воспроизведению сообщения у получателя.
Системы передачи сигналов должны быть построены так, чтобы, несмотря на искажения и помехи, сообщение восстанавливалось с заданной точностью.
1.1. Аналоговые, дискретные и цифровые сигналы
Аналоговым сигналом в системах передачи называется непрерывный электрический или оптический сигналы Fн(t), параметры которого (амплитуда, частота или фаза) изменяются по закону непрерывной функции времени источника информации, например, речевого сообщения, подвижного или неподвижного изображения и т. д. Непрерывные сигналы могут принимать любые значения (бесконечное множество) в некоторых пределах (рисунок 1.1).
Рисунок 1.1. Аналоговый непрерывный сигнал.
Дискретные сигналы - состоят из отдельных элементов, принимающих конечное число различных значений. Аналоговые дискретные сигналы Fд(t) можно получить из непрерывных Fн(t), используя дискретизацию по времени (через интервал Тд), квантование по амплитуде (через интервал (?) или их одновременно (рисунок 1.2 а, б, в). Цифровой сигнал Fц(t) формируется в виде группы импульсов в двоичной системе счисления, соответствующих амплитуде квантованного по уровню и дискретного по времени аналогового сигнала (рисунок 1.2г), при этом наличие электрического импульса соответствует "1" в двоичной системе счисления, а отсутствие - "0". Основным преимуществом цифровых сигналов является высокая помехозащищенность, так как при наличии шумов и искажений при их передаче достаточно зарегистрировать на приеме наличие или отсутствие импульсов.
Рисунок 1.2. Дискретные сигналы:
а) - дискретный по времени; б) - дискретный по уровню;
в) - дискретный по времени и по уровню; г) - цифровой двоичный сигнал.
Преобразование непрерывного сигнала в цифровой может осуществляться при помощи импульсно - кодовой модуляции, дельта - модуляции, дифференциальной импульсно - кодовой модуляции (ИКМ, ДМ, ДИКМ) и их модификаций. Таким образом, для получения цифрового сигнала принципиально необходимо произвести три основные операции над непрерывным сигналом: дискретизацию по времени, квантование по уровню и кодирование.
1.2. Многоканальные системы передачи
Многоканальной системой передачи называется совокупность технических средств, обеспечивающих одновременную и независимую передачу сообщений от нескольких источников к получателям по одной линии передачи. К передатчику N-канальной системы связи подводятся первичные сигналы от N источников сообщений. Эти первичные сигналы подвергаются специальной обработке, (преобразуются в канальные сигналы), затем объединяются в общий групповой сигнал, направляемый в линию передачи. В приемной части системы из группового сигнала выделяются индивидуальные сигналы отдельных каналов, соответствующие первичным передаваемым сообщениям. При построении многоканальных систем передачи одной из основных является задача разделения канальных сигналов. Для решения этой задачи требуется осуществить операцию преобразования первичных сигналов, состоящую в том, что в передающей части системы сигналы отдельных каналов наделяются некоторыми, заранее обусловленными признаками, которые должны быть такими, что бы в приемной части системы сигналы могли быть различены и разделены. Структурная схема такой системы N-канальной связи представлена на рисунке 1.3. Первичные сигналы c1(t), c2(t),..., cN(t), поступающие в передающую часть системы, преобразуются устройствами М1, М2,..., МN; сигналы на выходах этих устройств v1(t), v2(t), ... ,  N(t) называются канальными. Для аналитического описания этого преобразования введем в рассмотрение операторы(Оператор – математическое понятие, означающее соответствие между элементами двух множеств X и Y, относящее каждому элементу x множества X некоторый элемент у множества Y. Например, ) Mi, i=1,N, связывающие входные ci(t) и выходные vi(t) сигналы преобразователей Mi. Теперь можно записать
N(t) называются канальными. Для аналитического описания этого преобразования введем в рассмотрение операторы(Оператор – математическое понятие, означающее соответствие между элементами двух множеств X и Y, относящее каждому элементу x множества X некоторый элемент у множества Y. Например, ) Mi, i=1,N, связывающие входные ci(t) и выходные vi(t) сигналы преобразователей Mi. Теперь можно записать
 (1.1.)
(1.1.)
Рисунок 1.3. Структурная схема многоканальной системы передачи
сi(t) - первичные сигналы; Mi - преобразователи, формирующие канальные сигналы; vi(t) - канальные сигналы; О - устройство объединения канальных сигналов; v(t) - групповой сигнал; n(t) - помеха; Фi(t) - разделительные (фильтрующие) устройства; Di - преобразователи, восстанавливающие первичные сигналы.В процессе преобразования (1.1) необходимо решить две задачи. Во - первых, каждый из канальных сигналов vi(t), i=1,N нужно наделить совокупностью физических признаков

(первый индекс - номер признака, второй - номер канала), отличающих его от остальных канальных сигналов; эти признаки (или параметры) можно назвать разделительными. Во - вторых, необходимо сформировать канальные сигналы так, чтобы в них содержались передаваемые сообщения, то есть сведения о форме первичных сигналов, поступающих на входы каналов.
Групповой сигнал v(t) получается объединением канальных сигналов. Обозначим оператор через О. Тогда
 (1.2)
(1.2)
В частности, групповой сигнал можно получить суммированием канальных сигналов
 (1.3)
(1.3)
такие системы назовем аддитивными. Системы, в которых для формирования группового сигнала применяются другие операции (не суммирование), будем называть комбинационными. В современной многоканальной связи используют в большинстве случаев аддитивные системы. Групповой сигнал, проходя через элементы системы передачи, претерпевает искажения - линейные и нелинейные; кроме того, на сигнал накладываются помехи. Поэтому сигнал, поступающий на вход приемной части системы, отличается от сигнала v(t). Введем следующие обозначения: ![]() - сигнал на входе приемной части системы; L - оператор, характеризующий линейные искажения; Z - оператор, характеризующий нелинейные искажения; n(t) - аддитивная помеха. Если искажения малы, то есть мало отклонение от v(t), то цепь можно представить в виде параллельного соединения двух четырехполюсников. Один из них вносит только линейные искажения, то есть характеризуются оператором L; другой создает только нелинейные искажения и характеризуется оператором Z. Тогда
- сигнал на входе приемной части системы; L - оператор, характеризующий линейные искажения; Z - оператор, характеризующий нелинейные искажения; n(t) - аддитивная помеха. Если искажения малы, то есть мало отклонение от v(t), то цепь можно представить в виде параллельного соединения двух четырехполюсников. Один из них вносит только линейные искажения, то есть характеризуются оператором L; другой создает только нелинейные искажения и характеризуется оператором Z. Тогда
 (1.4)
(1.4)
Оператор L можно представить следующим образом. Если известна импульсная реакция цепи gL(t), то, используя интеграл Дюамеля, получим
 (1.5)
(1.5)
Если задана комплексная частотная характеристика (передаточная функция) цепи HL(?), то, обозначая спектр группового сигнала через Sv(?), получим спектр сигнала на выходе цепи
. Переходя от спектра к функции времени, то есть применяя обратное преобразование Фурье, находим
 (1.6)
(1.6)
Если линейных искажений нет, то HL( )=1 и L[v(t)]=v(t).
)=1 и L[v(t)]=v(t).
Выражения (1.5) и (1.6) характеризуют систему с постоянными параметрами (непараметрическую). Если параметры системы меняются во времени, то есть имеют место мультипликативные помехи, то импульсная реакция имеет вид gL(t,?), а передаточная функция Hi(,т).Оператор Z можно представить в различной форме. Одно из наиболее часто встречающихся представлений имеет вид
 (1.7)
(1.7)
При отсутствии нелинейных искажений все an=0 и Z[v(t)]=0.
Перейдем к описанию работы приемной части системы передачи. Обозначим через Фi операторы разделения (фильтрации) и через i(t) сигналы на выходах разделителей. С учетом этих обозначений
 (1.8)
(1.8)
Разделяющие (фильтрующие) устройства в приемнике могут быть как линейными, так и нелинейными четырехполюсниками: соответственно, операторы Фi будут линейными или нелинейными. Система передачи называется линейной, или системой с разделением каналов, если разделяющие устройства линейны; в противном случае система называется нелинейной.Восстановление первичных сигналов производится при помощи устройства Di. Вводя соответствующие операторы и обозначая через ![]() сигналы на выходах каналов, получим
сигналы на выходах каналов, получим
![]() (1.9)
(1.9)
Ясно, что чем меньше сигнал ![]() на выходе i - го канала отличается от сигнала ci(t) на его входе, тем выше качество связи. Целесообразно ввести некоторую численную оценку качества связи - некоторый критерий верности передачи, представляющий собой функционал от разности сигналов на входе и выходе канала:
на выходе i - го канала отличается от сигнала ci(t) на его входе, тем выше качество связи. Целесообразно ввести некоторую численную оценку качества связи - некоторый критерий верности передачи, представляющий собой функционал от разности сигналов на входе и выходе канала:
 (1.10)
(1.10)
Этот критерий, то есть вид функционала F, определяется теми требованиями, которые предъявляются к передаче данного вида сообщений. Так, например, при передаче аналоговых (непрерывных) сообщений часто применяют критерий среднеквадратического отклонения:
 (1.11)
(1.11)
где Т - длительность сигнала. При передаче дискретных сообщений критерием верности обычно служит вероятность ошибки ? = рош, то есть вероятность неправильного восстановления переданного символа. Такие способы оценки называются прямыми. Возможен и другой подход к оценке качества связи - по характеристикам и параметрам каналов: частотным, амплитудной величине уровня помех и так далее. Такая оценка называется косвенной. Косвенные методы оценки более удобны в эксплуатации и поэтому широко применяются на практике. Прямые методы, как правило, более удобны в теоретических исследованиях. Теперь можно определить основные задачи теории и техники многоканальной связи. При исследовании и разработке многоканальных систем связи обычно известны свойства первичных сигналов, количество каналов системы и характеристики линии связи и помех, то есть операторы L и Z и статистические характеристики помехи n(t). Теория многоканальной связи должна указать класс канальных сигналов, обеспечивающих принципиальную возможность их разделения, и определить вид операторов М, О, Ф и D, то есть свойства преобразователей передачи и приема и фильтрующих устройств. Задача проектирования (разработки) многоканальной системы состоит подборе класса канальных сигналов и операторов М, О, Ф, и D, минимизирующих отклонение ![]() от сi(t) с точки зрения принятого критерия верности. Должны быть также указаны пути технической реализации соответствующих устройств. В системах многоканальной связи кроме внешних помех возникают специфические внутренние помехи: вследствие неидеальности цепей и аппаратуры полное разделение канальных сигналов оказывается невозможным, появляются взаимные переходные влияния между каналами. Необходимо указать пути снижения этих влияний до допустимых значений. Далеко не всегда удается решить задачу проектирования (разработки) многоканальной системы связи в такой общей постановке. Часто, вследствие сложности, ее решают по частям - сначала выбирают класс канальных сигналов, операторы их формирования Мi и оператор объединения О, а затем, полагая известными свойства группового сигнала, находят операторы Фi и Di.
от сi(t) с точки зрения принятого критерия верности. Должны быть также указаны пути технической реализации соответствующих устройств. В системах многоканальной связи кроме внешних помех возникают специфические внутренние помехи: вследствие неидеальности цепей и аппаратуры полное разделение канальных сигналов оказывается невозможным, появляются взаимные переходные влияния между каналами. Необходимо указать пути снижения этих влияний до допустимых значений. Далеко не всегда удается решить задачу проектирования (разработки) многоканальной системы связи в такой общей постановке. Часто, вследствие сложности, ее решают по частям - сначала выбирают класс канальных сигналов, операторы их формирования Мi и оператор объединения О, а затем, полагая известными свойства группового сигнала, находят операторы Фi и Di.
2. Первичные сигналы
2.1. Общие характеристики сигналов
Каналы систем многоканальной связи предназначены для передачи различных сигналов:
- цифровых, соответствующих телеграфным сообщениям и сигналам передачи данных;
- аналоговых, то есть речевых (телефонная связь и звуковое вещание);
- сигналов, формируемых при передаче неподвижных и подвижных изображений (факсимильная связь, телевидение, видеотелефон);
- телесигнализации и телемеханики;
- различных систем оповещения, ip-телефония, интернет и так далее.
Первичные сигналы, соответствующие сообщениям различной природы, представляют собой случайные процессы. Поэтому напомним некоторые понятия и определения из теории случайных процессов и теории информации, которые будут использованы в дальнейшем.
Случайным процессом называется функция аргумента t, значения которой являются случайными величинами. Случайные процессы характеризуются n - мерными функциями распределения вероятностей, причем тем полнее, чем больше n. Однако многомерные функции распределения вероятностей практически могут быть поучены лишь в результате чрезвычайно сложной и трудоемкой обработки очень большого количества реализаций случайного процесса. Использование многомерных функций распределения для расчетов связано также с необходимостью выполнения сложных и громоздких выкладок. Вместе с тем ряд практически важных задач можно решить, зная более простые, хотя и менее полные, характеристики случайного процесса - числовые характеристики или средние значения (математические ожидания).
Среднее значение M[c(t)]=c(t) случайного процесса определяется выражением
 (2.1)
(2.1)
где ![]() (x,t) - одномерная плотность вероятности, а черта над функцией означает усреднение по множеству.
(x,t) - одномерная плотность вероятности, а черта над функцией означает усреднение по множеству.
Средняя мощность случайного процесса:
 (2.2)
(2.2)
Среднеквадратическое значение случайного процесса:
 (2.3)
(2.3)
Дисперсия случайного процесса, являющаяся мерой разброса его значений около среднего, определяется формулой
 (2.4)
(2.4)
Связь между значениями случайного процесса в различные моменты времени описывается корреляционной функцией:
 (2.5)
(2.5)
где ![]() (x1,x2,t1,t2) - двумерная плотность вероятности случайного процесса.
(x1,x2,t1,t2) - двумерная плотность вероятности случайного процесса.
Большое значение в теории сигналов имеют стационарные (в широком смысле) эргодические случайные процессы. Стационарными называются случайные процессы, для которых одномерная функция распределения не зависит от времени ![]() (x,t)=
(x,t)= ![]() (x), а двумерная плотность вероятности зависит только от разности |t2 - t1|=
(x), а двумерная плотность вероятности зависит только от разности |t2 - t1|=![]() :
: ![]() ( x1,x2,t1,t2 )=
( x1,x2,t1,t2 )= ![]() ( x1,x2,
( x1,x2,![]() )
)
Свойство эргодичности состоит в том, что средние по множеству с вероятностью "единица" равны средним по времени, взятым для любой реализации. Обозначая усреднение по времени, взятым для любой реализации. Обозначая усреднение по времени волнистой линией сверху, свойство эргодичности можно записать в виде
 (2.6)
(2.6)
 (2.7)
(2.7)
 (2.8)
(2.8)
Из выражений (2.7) и (2.8) видно, что при  = 0, B(0) =
= 0, B(0) =  2. По физическому смыслу с - постоянная составляющая процесса, B(0) = 2 - его полная мощность. Если с = 0, то, как следует из (2.4), дисперсия равна 2, то есть мощности процесса.
2. По физическому смыслу с - постоянная составляющая процесса, B(0) = 2 - его полная мощность. Если с = 0, то, как следует из (2.4), дисперсия равна 2, то есть мощности процесса.
Мощность, заключенную в конечной полосе частот между 1 и 2, определяют интегрированием функции G() в соответствующих пределах:
 (2.9)
(2.9)
Мгновенная мощность сигналов связи может принимать различные значения в широких пределах. Чтобы охарактеризовать эти пределы, вводят понятия динамического диапазона и пик-фактора сигналов. Динамический диапазон сигнала в децибелах определяется выражением
![]() (2.10)
(2.10)
где Рмакс - максимальное, а Рмин - минимальное значение мгновенной мощности.
Пик-фактором сигнала Q называется отношение его максимальной мощности к средней. В логарифмических единицах
 (2.11)
(2.11)
В некоторых случаях динамический диапазон и пик-фактор определяются не в логарифмических, а в абсолютных единицах (в "разах").
Важным параметром сигнала является также количество информации I, переносимой им в единицу времени (бит/с). Рассмотрим сначала цифровые сигналы, которые представляют собой последовательности импульсов с детерминированным тактовым интервалом, амплитуды которых могут принимать некоторое конечное количество разрешенных значений (уровней). Введем следующие обозначения: l - количество разрешенных уровней; Тт- период импульсной последовательности (тактовый интервал); Fт = 1/Тт - тактовая частота, численно равная скорости передачи, то есть количеству импульсов в секунду; рi - вероятность появления сигнала с i - м уровнем. Предположим, что импульсы с различными уровнями статистически независимы. В этом случае
 (2.12)
(2.12)
где Iц - количество информации, содержащейся в цифровом сигнале. Если импульсы различных уровней равновероятны, то есть если Рi = 1/l, то
I ц = Fт log2 l , (2.13)
Формула (2.13) дает оценку сверху информационной содержательности цифрового сигнала.
Перейдем теперь к аналоговым сигналам. Не нарушая заданного качества связи, аналоговый сигнал можно заменить цифровым сигналом - последовательностью импульсов, следующих друг за другом с частотой дискретизации Fд = 2Fс и количеством разрешенных уровней lc, зависящим от отношения средней мощности сигнала Рс.ср к мощности помехи Р. В курсе теории передачи сигналов доказывается, что

Подставляя это выражение в формулу (2.13) вместо l, найдем
 (2.14)
(2.14)
Формула (2.14) дает оценку сверху количеству информации, содержащейся в аналоговом сигнале.
2.2. Логарифмические единицы
Для упрощения электрических расчетов и удобства эксплуатации систем передачи мощность, напряжение и ток оценивается не абсолютными их значениями, а относительными и измеряются не в ваттах, вольтах и амперах, а в единицах уровня передачи - децибелах (дБ).
Уровнем передачи называется логарифмическое отношение мощности, напряжения и тока в измеряемой точке цепи к мощности, напряжению и току, которые приняты за исходные:
 (2.15)
(2.15)
![]() (2.16)
(2.16)
![]() (2.17)
(2.17)
где Р, U, I - величины мощности, напряжения или тока в рассматриваемой точке; Р0,U0,I0 - величины, принятые за исходные при определении уровней передачи.
Уровни передачи могут быть положительными, отрицательными и нулевыми, так как логарифм числа больше единицы - положительный, меньше единицы - отрицательный, единицы - равен нулю. В зависимости от значений мощности, напряжения и тока, которые приняты за исходные, различают абсолютный, относительный и измерительный уровни передачи.
Абсолютным называется такой уровень передачи, когда за исходные величины приняты Р0=1 мВт, U0=0,775 В и I0=1,29 мА.
Относительным называется уровень, когда мощность, напряжение и ток в какой - либо произвольной точке цепи, относительно которой определяется уровень. Обычно точкой сравнения выбирается начало цепи.
Измерительным называется абсолютный уровень в рассматриваемой точке системы (канала), если в начале этой системы (на входе канала) включен нормальный генератор. Нормальным называется генератор с ЭДС, равной 1550 мВ, и внутренним активным сопротивлением, равным 600 Ом. Частота тока нормального генератора может быть любой, однако, на практике, если нет специальной оговорки, частоту считают равной 800 Гц. Если входное сопротивление канала активно и равно 600 Ом, то при подключении нормального генератора на входе канала оказывается абсолютный нулевой уровень мощности, тока и напряжения.
В общем случае численные значения уровней передачи по мощности, напряжению и току не совпадают. Однако между ними легко установить взаимозависимость, если известны сопротивления Zx и Zo, на которых выделяются мощности Px и Po. Действительно, pм = 10 lg (Px/Po) = 10 lg (U2x/|Zx|) (|Zo|/U2o) = 20 lg (Ux/Uo) - 10 lg (|Zx| / |Zo|), откуда
(2.18)
Аналогично получим
 (2.19)
(2.19)
От логарифмических единиц (уровней в децибелах) легко перейти к абсолютным (мощности, напряжению, току) по очевидным формулам:
 (2.10)
(2.10)
Уровни передачи измеряются специальным прибором - указателем уровня УУ, который является обычным электронным вольтметром со шкалой, отградуированной в децибелах. Указателем уровня измеряются затухание сигналов, вносимых различными узлами или линией, усиление усилителей, помехи и другие электрические характеристики каналов связи.
Для определения затухания сигнала, вносимого узлом, линией, или усиления усилителя необходимо измерить уровни передачи на их входе и выходе. Разность уровней определяет затухание в цепи
А = рвх - р вых (2.21)
или усиление усилителя
S = pвых - р вх (2.22)
Эти величины можно определить также расчетным путем, если известны мощности, напряжения или токи на входе и выходе устройства.
При передаче сигналов по каналам связи имеют место потери энергии в пассивных четырехполюсниках или ее увеличение в активных четырехполюсниках. Чтобы охарактеризовать изменение энергии сигнала в различных четырехполюсниках, образующих каналы связи, вводится понятие рабочего затухания и рабочего усиления. Рабочее затухание измеряется в децибелах и определяется по формуле
 (2.23)
(2.23)
где Рг - кажущаяся мощность, которую отдал бы источник сигнала согласованной с ним нагрузке, Р2 - кажущаяся мощность, выделяющаяся в нагрузке четырехполюсника в реальных условиях включения. При таком определении учитывается возможная несогласованность на входе и выходе четырехполюсника. Рабочее усиление определяется выражением
 (2.24)
(2.24)
здесь величины Рг и Р2 имеют тот же смысл, что в формуле (2.23).
При проектировании и эксплуатации систем связи необходимо знать величины уровней сигнала в различных точках тракта передачи. Чтобы охарактеризовать изменения энергии сигнала при его передаче, пользуются диаграммой уровней - графиком, показывающим распределение измерительных уровней вдоль тракта передачи.
Рисунок 2.1. Диаграмма уровней.
В качестве примера на рисунке 2.1 оказана диаграмма уровней канала передачи, состоящего из усилителя передачи Успер, трех участков линии связи l1, l2 и l3, двух промежуточных усилителей Ус1 и Ус2 и усилителя приема Успр. На диаграмме отмечены характерные точки тракта: точка 1 - вход; точка 2 - выход канала; точки 3 - выходы оконечного усилителя передающей станции и промежуточных усилителей; точки 4 - входы промежуточных и оконечно - приемного усилителей. Уровни в точках 3 определяются усилением усилителей; уровни в точках 4 зависят от затуханий участков линии. Минимально допустимый уровень в точках 4 определяется требуемым превышением сигнала над помехой (защищенностью):
 (2.25)
(2.25)
где Рс и Рп - мощности сигнала и помехи, а рс и рп - соответствующие уровни.
Соотношение между уровнями на входе и выходе канала определяется его остаточным затуханием, которое представляет собой рабочее затухание, определенное в условиях замыкания входа и выхода канала на активные сопротивления нагрузки, соответствующие номинальным значениям входного и выходного сопротивлений канала. Остаточное затухание равно разности между суммой всех рабочих затуханий, имеющихся в канале, и суммой всех рабочих усилений:
 (2.26)
(2.26)
2.3. Телефонные (речевые) сигналы
Звуки речи образуются в результате прохождения воздушного потока из легких через голосовые связки и полости рта и носа. Частота импульсов основного тона речи лежит в пределах от 50 - 80 Гц (очень низкий голос - бас) до200 - 250 Гц (женские и детские голоса). Импульсы основного тона содержат большое количество гармоник (до 40), причем амплитуды гармоник убывают с увеличением частоты со скоростью приблизительно 12 дБ на октаву. При разговоре частота основного тона меняется в значительных пределах, особенно при переходах от гласных звуков к согласным и наоборот.
Высокое качество передачи телефонного сигнала характеризуется уровнем громкости, разборчивостью, естественным звучанием голоса, низким уровнем помех. Эти факторы определяют требования к физическим характеристикам речевого сигнала и телефонного канала.
Основными параметрами телефонного сигнала являются:
- мощность телефонного (речевого) сигнала Pтлф. Согласно данным МСЭ-Т средняя мощность телефонного сигнала в точке с нулевым измерительным уровнем на интервале активности составляет 88 мкВт. С учетом коэффициента активности
 =0,25 средняя мощность телефонного сигнала Pср равна 22 мкВт. Кроме речевых сигналов в канал связи могут поступать сигналы управления - набора номера, вызова и так далее. С учетом этих сигналов среднюю мощность телефонного сигнала принимают равной 32 мкВт, то есть средний уровень телефонного сигнала составляет pср = 10 lg (32 мкВт/1мВт) = - 15 дБ м0;
=0,25 средняя мощность телефонного сигнала Pср равна 22 мкВт. Кроме речевых сигналов в канал связи могут поступать сигналы управления - набора номера, вызова и так далее. С учетом этих сигналов среднюю мощность телефонного сигнала принимают равной 32 мкВт, то есть средний уровень телефонного сигнала составляет pср = 10 lg (32 мкВт/1мВт) = - 15 дБ м0;
- коэффициент активности телефонного сообщения (, то есть отношение времени, в течение которого мощность сигнала на выходе канала превышает заданное пороговое значение, к общему времени занятия канала для разговора. При разговоре каждый из собеседников говорит приблизительно 50% времени. Кроме того, отдельные слова, фразы отделяются паузами. Поэтому коэффициент активности составляет 0,25..0,35.
- динамический диапазон речевого сигнала определяется выраженным в децибелах отношением максимальной и минимальной мощности сигнала (формула 2.10). Динамический диапазон телефонного сигнала составляет DС=35...40 дБ;
- пик-фактор сигнала (формула 2.11), который составляет 14 дБ. При этом максимальная мощность, вероятность превышения которой исчезающе мала, равна 2220 мкВт (+3,5 дБм0);
- энергетический спектр речевого сигнала, представленный на рисунке 2.2 - область частот, в которой сосредоточена основная энергия сигнала. Здесь (
 =10lg (П2(f)/П20)(f, где П2(f)- спектральная плотность среднего квадрата звукового давления; П0 - порог слышимости (минимальное звуковое давление, которое начинает ощущаться человеком с нормальным слухом на частотах 600..800 Гц); (f = 1 Гц. Из рисунка 2.2 следует, что речь представляет собой широкополосный процесс, частотный спектр которого простирается от 50..100 Гц до 8000..10000 Гц. Установлено, однако, что качество речи получается вполне удовлетворительным при ограничении спектра частотами 300..3400 Гц. Эти частоты приняты МСЭ-Т в качестве границ эффективного спектра речи. При указанной полосе частот слоговая разборчивость составляет около 90%, разборчивость фраз - более 99% и сохраняется удовлетворительная натуральность звучания.
=10lg (П2(f)/П20)(f, где П2(f)- спектральная плотность среднего квадрата звукового давления; П0 - порог слышимости (минимальное звуковое давление, которое начинает ощущаться человеком с нормальным слухом на частотах 600..800 Гц); (f = 1 Гц. Из рисунка 2.2 следует, что речь представляет собой широкополосный процесс, частотный спектр которого простирается от 50..100 Гц до 8000..10000 Гц. Установлено, однако, что качество речи получается вполне удовлетворительным при ограничении спектра частотами 300..3400 Гц. Эти частоты приняты МСЭ-Т в качестве границ эффективного спектра речи. При указанной полосе частот слоговая разборчивость составляет около 90%, разборчивость фраз - более 99% и сохраняется удовлетворительная натуральность звучания.
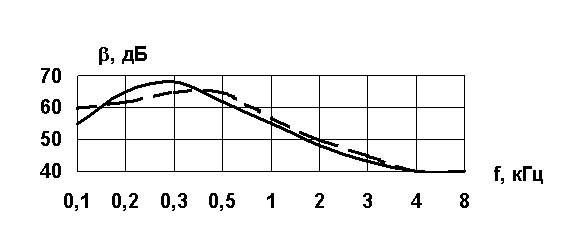
Рисунок 2.2. Энергетический спектр речевого сигнала:
-- - русская речь;
- - - английская речь.
- оценка сверху количества информации, содержащейся в речевом сигнале Iр .
 (2.27)
(2.27)
Здесь ( F=3100 Гц - эффективная ширина спектра речи; Рр.ср=88мкВт - средняя мощность речевого сигнала на активных интервалах; (
F=3100 Гц - эффективная ширина спектра речи; Рр.ср=88мкВт - средняя мощность речевого сигнала на активных интервалах; (![]() =0,25 - коэффициент активности; Рш=178000 пВт - допустимая невзвешенная мощность шумов. Подставляя эти величины в формулу (2.27), получаем Iр "8000 бит/с.
=0,25 - коэффициент активности; Рш=178000 пВт - допустимая невзвешенная мощность шумов. Подставляя эти величины в формулу (2.27), получаем Iр "8000 бит/с.
2.4. Сигналы звукового вещания
Источниками звука при передаче программ вещания обычно являются музыкальные инструменты или голос человека.Динамический диапазон сигналов вещательной передачи следующий: речь диктора 25..35 дБ, художественное чтение 40..50 дБ, вокальные и инструментальные ансамбли 45..55 дБ, симфонический оркестр до 65 дБ. При определении динамического диапазона максимальным считается уровень, вероятность превышения которого равна 2%, а минимальным - 98%.
Средняя мощность сигнала вещания существенно зависит от интервала усреднения. В точке с нулевым измерительным уровнем средняя мощность составляет 923 мкВт при усреднении за час, 2230 мкВт - за минуту и 4500 мкВт - за секунду. Максимальная мощность сигнала вещания в точке с нулевым измерительным уровнем составляет 8000 мкВт.
Частотный спектр сигнала вещания расположен в полосе частот 15..20000 Гц. При передаче как телефонного сигнала, так и сигналов вещания полоса частот ограничивается. Для достаточно высокого качества (каналы вещания первого класса) эффективная полоса частот должна составлять 0,05..10 кГц с амплитудно-частотными искажениями не более 4,3 дБ на краях по отношению к остаточному затуханию на частоте 0,05 кГц и 8 мс на частоте 10 кГц по отношению к минимальной величине времени распространения, для безукоризненного воспроизведения программ вещания (каналы высшего класса) 0,03...15 кГц.
Подставляя в формулу (2.12) (F=10000 Гц, Рср=923 мкВт и Рп=4000пВт, получим оценку сверху количества информации, содержащейся в сигнале вещания: Iвещ=180000бит/с.
2.5. Факсимильный сигнал
Факсимильной связью называется передача неподвижных изображений (рисунков, чертежей, фотографий, текстов, газетных полос и та далее) по каналам электрической связи. Факсимильный сигнал формируется методом построчный развертки. Частотный спектр первичного факсимильного сигнала определяется характером передаваемого изображения, скоростью развертки и размерами сканирующего пятна. Для параметров факсимильных аппаратов, рекомендованных МСЭ-Т, верхняя частота сигнала может составлять 732, 1100 и 1465 Гц. Динамический диапазон сигнала составляет около 25 дБ, пик-фактор равен 4,5 дБ при 16 градациях яркости (l = 16).
На рисунке 2.3 показан один из возможных способов технической реализации электрооптического анализа и синтеза изображений.
Бланк с передаваемым изображением накладывается на барабан Б передающего факсимильного аппарата. На поверхность изображения проектируется яркое пятно, перемещающее вдоль оси барабана. При вращении барабана на светлое пятно по винтовой линии обегает его поверхность, осуществляя развертку изображения. Отраженный световой поток воздействует на фотоэлемент ФЭ, в результате чего в его цепи появляется изменяющийся во времени ток iс(t), мгновенное значение которого определяется оптической плотностью (отражающей способностью) элементов изображения.
Рисунок 2.3. Структурная схема канала факсимильной связи.
В приемной части факсимильного аппарата принятый сигнал подается на безынерционную газосветовую лампу ГЛ, интенсивность свечения которой пропорциональна мгновенному значению сигнала. Пучок света от этой лампы фокусируется на поверхность барабана приемного аппарата. На барабане закреплена светочувствительная бумага; он вращается синхронно и синфазно с барабаном передатчика. Световое пятно от ГЛ перемещается вдоль оси барабана так же, как и в передатчике. В результате после проявления получается копия передаваемого изображения.
Частотный спектр первичного факсимильного сигнала определяется характером передаваемого изображения, скоростью развертки и размерами анализирующего пятна. Максимальную частоту рисунка первичного факсимильного сигнала fрис можно рассчитать, пологая, что оригинал представляет собой чередующиеся черные и белые полосы, перпендикулярные направлению развертки, причем ширина этих полос равна ширине анализирующего пятна. В этом случае
 (2.28)
(2.28)
где D - диаметр барабана, мм; N - частота вращения барабана, об/мин; d - ширина анализирующего пятна, мм.
Информационную содержательность факсимильного сигнала определим по формуле (2.12), полагая l = 2 для штрихового изображения, l = 16 для полутонового изображения и Fт = 2fрис. В результате расчетов получим: Iфакс = 2,93 * 103 бит/с, для штрихового изображения и N=120 об/мин; Iфакс = 11,7 *103 бит/с для полутонового изображения и N = 120 об/мин.
Наличие помех в канале приводит к появлению точек и загрязнений на воспроизводимом изображении. Качество связи оказывается удовлетворительным, если разность между максимальными уровнями факсимильного сигнала и помехи составляет приблизительно 35 дБ.
2.6. Телевизионный сигнал
Телевизионный сигнал также формируется методом развертки. Согласно телевизионному стандарту число строк z = 625. Передача движущихся изображений сводится к последовательной передаче мгновенных фотографий - кадров. В секунду передается n = 25 кадров. Чтобы избежать мерцания изображения на экране приемной трубки (кинескопа), стандарт предусматривает чересстрочную развертку, при которой указанные 625 строк передаются в виде двух полукадров (каждый за 1/50 секунды) последовательной передачей сначала нечетных (первый полукадр), а затем четных (второй полукадр) строк. Количество строк развертки в секунду N = nz = 15 625, время передачи одной строки Тс = 64 мс.
Во время смены строк и кадров развертывающий луч приемной трубки должен быть погашен. Также необходимо осуществить синхронизацию лучей приемной и передающей трубок. Таким образом, кроме сигнала изображения необходимо передавать вспомогательные управляющие импульсы (гасящие и синхронизирующие). Электрический сигнал, включающий в себя сигнал изображения и управляющие импульсы, называется полным телевизионным сигналом.
Спектр телевизионного сигнала (видеосигнала) зависит от характера передаваемого изображения, но структура спектра определяется в основном разверткой. Анализ показывает, что спектр телевизионного сигнала характеризуется наличием "сгустков" энергии в областях "окружающих" гармоники частоты строк Fс = 15 625 Гц. На рисунке 2.4 показан вид спектра видеосигнала, полученного при развертке неподвижного изображения.
Рисунок 2.4. Спектр видеосигнала (неподвижное изображение).
Он дискретен, содержит постоянную составляющую, составляющие с частотами, кратными Fс и Fп = 50 Гц (частота полукадров) и составляющие с частотами mFc  nFц, m = 1, 2, 3, ..., n = 1, 2, 3, ...
nFц, m = 1, 2, 3, ..., n = 1, 2, 3, ...
С ростом частоты энергия спектральных составляющих видеосигнала убывает. В результате экспериментальных исследований установлено, что для черно - белых изображений почти вся мощность видеосигналов сосредоточена в области частот от 0 до 1,5 МГц, причем основная мощность сигнала сосредоточена в области до 200 - 300 кГц. Перепад уровней во всем спектре видеочастот достигает 38 - 40 кГц, причем на участке от 0 до 200 кГц изменение уровней составляет примерно 20 дБ. На участке от 0 до 300 - 500 кГц энергия сигнала концентрируется в узких областях вокруг гармоник частоты строк mFc и (m+1)Fc мощность сигнала мала. С увеличением частоты эти области концентрации энергии "размываются". Наивысшая частота эффективной части спектра видеосигнала составляет 6 МГц.
В системах цветного телевидения (ЦТ) передаваемое изображение расчленяется с помощью специальных светофильтров на три одноцветных изображения - красное (R), зеленое (G) и синее (В). Красные, зеленые и синие лучи попадают каждый на свою передающую трубку, в результате чего образуются сигналы цветности ЕR, EG и EB. В приемном устройстве путем сложения трех одноцветных изображений воспроизводится передаваемое цветное изображение.
Цветное телевидение должно быть совместимым с черно - белым. Это означает, что, во - первых, цветные передачи должны приниматься в виде черно - белых на монохромные телевизоры и, во - вторых, черно - белые передачи должны приниматься на приемники ЦТ. Ширина спектра сигнала ЦТ должна быть такой же, как ширина спектра сигнала черно - белого телевидения, чтобы их передача могла осуществляться по одним и тем же каналам. Эти условия выполняются при помощи специальной обработки первичных сигналов ЕR, EG и EB . Из них формируется сигнал яркости ЕY =0,3ЕR + 0,59EG + 0,11EB . Он передается в полной полосе частот от 0 до 6 МГц и обеспечивает совместимость систем цветного и черно - белого телевидения. Для передачи цветов создаются два цветоразностных сигнала: ЕR - Y и EB - Y, для передачи каждого из которых необходима полоса частот шириной 1,5 МГц.
Отношение сигнал/помеха определяется как отношение размаха сигнала изображения к действующему напряжению помехи на выходе взвешивающего фильтра. Согласно рекомендации МСЭ-Т защищенность телевизионного сигнала от взвешенной флуктуационной помехи должна быть не хуже 57 дБ. Для невзвешенной помехи с равномерным спектром защищенность должна быть не хуже 48 дБ. При таком отношении сигнал/помеха глаз различает на экране кинескопа около 100 градаций яркости.
Исходя из этого, а также считая, что все градации яркости равновероятны, определим динамический диапазон, пик-фактор и информационную содержательность телевизионного сигнала:
2.7. Телеграфные сигналы и сигналы передачи данных
Первичные телеграфные сигналы и сигналы передачи данных обычно имеют вид последовательностей двухполярных (рисунок 2.5а) или однополярных (рисунок 2.5б) прямоугольных импульсов. Длительность импульсов определяется скоростью передачи В, измеряемой в бодах (импульсах в секунду). Введем понятие тактовой частоты Fт = 1/Tи , которая численно равна скорости передачи В. Величины Fт и В совпадают только в случае двоичных последовательностей. При переходе к многопозиционным кодам (например, к многоуровневым импульсам) это совпадение нарушается.
Вероятность появления положительных р(+А) и отрицательных p(-А) импульсов, а также статистические связи между импульсами определяются свойствами источника информации. Часто р(+А) = p(-А) = 0,5 и импульсы последовательности статистически независимы. Энергетический спектр такого сигнала определяется выражением:
 (2.29)
(2.29)
Рисунок 2.5. Сигналы передачи данных и телеграфии.
Подставляя в формулу (2.29) =2пf и Tи=1/Fт и обозначая нормированный спектр
 , получим.
, получим.
График нормированного энергетического спектра телеграфного сигнала показан на рисунке 2.6.

Рисунок 2.6. Энергетический спектр двоичного сигнала.
Определим минимальную полосу частот ![]() F, необходимую для передачи телеграфного сигнала. Выражение (2.29) показывает, что для неискаженной передачи последовательности прямоугольных импульсов необходима бесконечно широкая полоса частот, так как спектральная плотность сигнала не равна нулю на всей оси частот. Следует, однако, иметь в виду, что при передаче двоичных сигналов в приемнике нет необходимости восстанавливать импульсы без искажений, то есть сохранять их форму; для восстановления информации достаточно зафиксировать только знак импульса при двухполярном сигнале, либо наличие или отсутствие импульса при однополярном сигнале. Исходя из этих условий и будем решать задачу определения величины
F, необходимую для передачи телеграфного сигнала. Выражение (2.29) показывает, что для неискаженной передачи последовательности прямоугольных импульсов необходима бесконечно широкая полоса частот, так как спектральная плотность сигнала не равна нулю на всей оси частот. Следует, однако, иметь в виду, что при передаче двоичных сигналов в приемнике нет необходимости восстанавливать импульсы без искажений, то есть сохранять их форму; для восстановления информации достаточно зафиксировать только знак импульса при двухполярном сигнале, либо наличие или отсутствие импульса при однополярном сигнале. Исходя из этих условий и будем решать задачу определения величины ![]() F.
F.
Рисунок 2.7. К расчету полосы частот.
Пусть на вход идеального фильтра низкой частоты с частотной характеристикой
 (2.30)
(2.30)
подается последовательность из двух прямоугольных импульсов, показанных на рисунке 2.7. Найдем сигнал на выходе фильтра при различных значениях частоты среза c=2пfc. Сигнал с(t) можно представить аналитически:
 (2.31)
(2.31)
где - единичный скачок (единичная функция):
 (2.32)
(2.32)
Известно, что сигнал на выходе идеального фильтра с частотной характеристикой (2.30) при подаче на его вход единичного скачка (2.32) определяется выражением
 (2.33)
(2.33)
где - интегральный синус. Используя принцип суперпозиции, из выражений (2.31) и (2.33) находим сигнал с2(t) на выходе идеального фильтра:
- интегральный синус. Используя принцип суперпозиции, из выражений (2.31) и (2.33) находим сигнал с2(t) на выходе идеального фильтра:
 (2.34)
(2.34)
Если частотные характеристики канала связи приближаются к характеристикам идеального фильтра низкой частоты, то эффективная полоса частот двоичного сигнала составляет (F = 0,5 Fт.
При наличии частотных искажений в реальных каналах приходится несколько расширить полосу частот, отводимую для передачи импульсных сигналов. Часто принимают ![]() F = Fт = В.
F = Fт = В.
Контрольные вопросы
- Какие сигналы называются аналоговыми, дискретными и цифровыми?
- Дать определение многоканальной системы передачи?
- Изобразить структурную схему многоканальной системы передачи. Указать назначение элементов схемы.
- Для чего предназначены каналы систем многоканальной связи?
- Что называется случайным процессом?
- Что называется математическим ожиданием, дисперсией и корреляционной функцией случайного процесса?
- Какие случайные процессы называются стационарными в широком смысле?
- В чем состоит свойство эргодичности?
- Дать определения параметров сигнала: динамический диапазон, пик - фактор, количество информации.
- Что называется уровнем передачи? Какие различают уровни передачи?
- Изобразить диаграмму уровней канала передачи и пояснить характерные точки тракта.
- Дать понятие рабочего затухания и рабочего усиления.
- Перечислить и пояснить основные параметры телефонного сигнала.
- Рассказать про сигналы звукового вещания.
- Что называется факсимильной связью и как формируется факсимильный сигнал?
- Изобразить структурную схему факсимильной связи и пояснить ее.
- Что значит полный телевизионный сигнал?
- От чего зависит и чем характеризуется спектр видеосигнала?
- Определить динамический диапазон, пик-фактор и информационную содержательность телевизионного сигнала.
- Какой вид имеют телеграфные сигналы и сигналы передачи данных?
- Определить минимальную полосу частот (F, необходимую для передачи телеграфного сигнала. Примеры решения задач
Примеры решения задач
Пример 1
Зная максимальный, минимальный и средний уровень по напряжению, определить динамический диапазон системы и пик-фактор, если уровни, которые известны, являются абсолютными, и найти максимальную мощность, выделенную на нагрузке Rн.
pн мин = 2 дБ; pн макс = 6 дБ; pн ср = 4 дБ; Rн = 210 Ом.
Решение:
Динамический диапазон определяет отношение наибольшей мощности к наименьшей и выражается формулой:
 ,дБ
,дБ
А так как даны максимальный pн макс и минимальный рн мин абсолютные уровни по напряжению, которые соответственно определяются формулами:
рн мах = 20 lg (Uмакс/U0), дБ
рн мин = 20 lg (Uмин/U0), дБ
где U0 - эталонное напряжение (U0 = 0,775 В), то из этих формул выразим Uмакс и Uмин.
 , В0
, В0
 , В
, В
Подставим эти выражения в формулу для D - динамического диапазона
Получили D = рн макс - рн мин = 6 - 2 = 4 дБ.
Пик-фактор Q - определяется логарифмическим отношением максимальной мощности сигнала к средней
Q = 10lg (pмакс/ pср) = 20lg (Uмакс/Uср), дБ
Для определения Q - воспользуемся тем же принципом, что и для нахождения динамического диапазона. Тогда получим
Q = pн макс - pн ср = 6 - 4 = 2 дБ.
Максимальную мощность, которая выделится на нагрузке можно определить из формулы абсолютного уровня по мощности:
Рм = 10lg (Рх / Р0),
где Р0 - эталонная мощность, Р0 = 1* 10-3 Вт.
Рх - мощность, выделенная на нагрузке
Рх = Р0 * 10Рм / 10 = Р0100,1Рм .
Связь между уровнем по мощности и уровнем по напряжению выражается формулой:
рм = рн +10lg (R0 / Rн), дБ
где R0 - эталонное сопротивление, R0 = 600 Ом;
Rн - сопротивление нагрузки, Rн = 210 Ом.
Мощность будет максимальной, если будет приложено максимальное напряжение, а следовательно, и уровень.
рм макс = рн макс + 10lg (R0 / Rн), дБ
Подставим данное выражение в формулу для мощности, определим Рмакс.
 , Вт
, Вт
 мВт
мВт
Ответ: D = 4 дБ; Q = 2 дБ; Рмакс =11,4 мВт.
Пример 2
Определить какое количество информации содержится в цифровом сигнале, если известны две величины:
тактовая частота - Fт = 2 *106 бит/с ;
количество разрешенных уровней - l = 3.
Изобразить такой сигнал во временной области.
Решение:
Первичные сигналы характеризуются количеством информации, переносимой в единицу времени - информационной содержательностью сигнала I. Количество информации, содержащейся в цифровом сигнале, определяется по формуле:
Iц = Fт log2 l , бит/с
Где Fт - тактовая частота, l - количество разрешенных уровней.
Iц = 2 *106 ( log23 = 317*104, бит/с
Любой дискретный или цифрой сигнал - это последовательность импульсов, следующих через равные промежутки времени. Амплитуда (высота) этих импульсов пропорциональна значениям А(t) в отсчетных точках. Для цифрового сигнала характерно то, что отсчетные значения представлены в форме чисел, то есть в виде кодовых групп, состоящих из импульсов с двумя значениями амплитуд 1 и 0. Зависимость между числом разрешенных уровней l и количеством импульсов в кодовой группе m определяется выражением l ( 2m , где 2 - основание кода, поскольку элементы в кодовой группе могут принимать одно из двух значений 1 или 0. Тогда m - число элементов в кодовой группе - будет определяться как
m log2l log23 1,585 = 2
log2l log23 1,585 = 2
так как в качестве m - выбирается наименьшее целое, удовлетворяющее этому неравенству. Следовательно, чтобы заменить каждый из трех разрешенных уровней сигнала последовательностью из единиц и нулей, необходима кодовая группа, состоящая из двух импульсов - элементов или разрядов кодовой группы.
Изобразим такой цифровой сигнал во временной области - максимальный уровень - третий можно передать кодовой группой вида 11, средний уровень - вида 10, минимальный уровень - вида 00.
Пример 3
Определить допустимое затухание сигнала между микрофоном и телефоном, а также максимальную длину связи без включения усилителей в линию. Средняя мощность на выходе микрофона рм = 1мВт. Чувствительность телефона, то есть мощность сигнала, от которой он может работать, рт = 0,001 мВт.
Решение:
Определяем уровень на выходе микрофона
Рм = 10lg (1/1) = 0 дБ
Уровень на входе телефона
Рт = 10lg (0,001/1) = - 30 дБ
Отсюда допустимое затухание сигнала между микрофоном и телефоном
Адоп = рм - рт = о - (- 30) = 30 дБ
Затухание одного километра линии называется коэффициентом затухания  . Затухание, вносимое линией, определяется по формуле
. Затухание, вносимое линией, определяется по формуле
А = l ,
где l - длина линии, км. Зная допустимое затухание между микрофоном и телефоном и коэффициент затухания цепи, можно определить максимальную длину линии связи без включения усилителей в линию по формуле
lmax = Адоп/л.
Коэффициент затухания зависит от частоты, материала и диаметра проводов цепи, окружающей температуры и метеорологических условий. Если фактическая длина линии больше чем lmax, то в цепь необходимо включить усилители. Каждый из них должен компенсировать затухание предшествующего участка линии.
Пример 4
Найти остаточное затухание сигнала на выходе цепочки состоящей из трех последовательных соединений и четырехполюсников с коэффициентами передачи k1 = 2 дБ; k2 = 3 дБ; k3 = - 0,2 дБ. На вход подается измерительный уровень сигнала Рвх = 1мВ.
Решение:
Определим остаточное затухание сигнала по формуле:
аr = рвх - рвых.
Для этого необходимо найти уровень передачи на выходе цепочки.
Переведем мощность на входе в уровень передачи
1мВт = 10lg(1мВт/1мВт) = 0 дБ,
рвых = 0+2+3-0,2 = 4,8 дБ.
Подставляя уровень передачи на выходе цепочки в формулу для определения остаточного затухания, получим:
аr = 0 - 4,8 = - 4,8 дБ.
4. Системы передачи с линейным разделением каналов
4.1. Линейно разделимые сигналы
Простейшим типом телекоммуникационных систем передачи информации является аддитивная линейная многоканальная система. Рассмотрим аддитивную линейную многоканальную систему, в которой групповой сигнал v(t) получается суммированием канальных сигналов v(t)=∑vi (t), а разделяющие устройства Фk представляют собой линейные четырехполюсники, то есть операторы Фk являются линейными. Назовем канальные сигналы vi (t) талой системы линейно разделимыми; выясним, какими свойствами характеризуются линейно разделимые сигналы.Предположим, что при передаче группового сигнала v(t) по линии связи искажения и помехи отсутствуют. В этом случае выражение ![]() , описывающее операцию разделения канальных сигналов, принимает вид
, описывающее операцию разделения канальных сигналов, принимает вид
![]() (4.1)
(4.1)
откуда, ввиду линейности оператора Фk
![]() . (4.2)
. (4.2)
Следовательно,
![]() (4.3)
(4.3)
Разделение канальных сигналов должно осуществляться при любых первичных сигналах с(t)на входах каналов. Так, например, в телефонной аппаратуре канальные сигналы должны быть разделены независимо от высоты голоса абонента, произношения, языка и тому подобное. Преобразователь k-го канала Mk преобразует каждый первичный сигнал из множества возможных первичных сигналов С в соответствующий канальный сигнал. Обозначим через Vk множество канальных сигналов k-го канала. Сигнал vk(t), входящий в выражение (4.3), является элементом этого множества (напомним, что ![]() - знак принадлежности. Читается, как vk(t) входит в Vk или vk(t) содержится в Vk , или vk(t) принадлежит Vk):
- знак принадлежности. Читается, как vk(t) входит в Vk или vk(t) содержится в Vk , или vk(t) принадлежит Vk): ![]() . Аналогично преобразователь n-го канала Mn преобразует множество первичных сигналов Св множество канальных сигналов n-го канала Vn и так далее.Множества канальных сигналов Vk,
. Аналогично преобразователь n-го канала Mn преобразует множество первичных сигналов Св множество канальных сигналов n-го канала Vn и так далее.Множества канальных сигналов Vk, ![]() назовем линейно разделимыми, если выражение (4.3) справедливо для всех канальных сигналов каждого из этих множеств. Свойства линейно разделимых множеств сигналов определяются теоремой.Для того чтобы множества сигналов V1, V2, …, VN были линейно разделимыми, необходимо и достаточно, чтобы эти множества были линейными и не имели взаимных пересечений.Напомним, что множество является линейным, если в него входит любая линейная комбинация его элементов. Так, если х1 и х2-элементы некоторого множества Х, то Х есть линейное множество, если
назовем линейно разделимыми, если выражение (4.3) справедливо для всех канальных сигналов каждого из этих множеств. Свойства линейно разделимых множеств сигналов определяются теоремой.Для того чтобы множества сигналов V1, V2, …, VN были линейно разделимыми, необходимо и достаточно, чтобы эти множества были линейными и не имели взаимных пересечений.Напомним, что множество является линейным, если в него входит любая линейная комбинация его элементов. Так, если х1 и х2-элементы некоторого множества Х, то Х есть линейное множество, если ![]() , где
, где ![]() и
и ![]() - произвольные постоянные. Например, линейным является множество сигналов, частотные спектры которых не содержат составляющих выше частоты
- произвольные постоянные. Например, линейным является множество сигналов, частотные спектры которых не содержат составляющих выше частоты ![]() . Действительно, если
. Действительно, если ![]() и
и ![]() - два таких сигнала, то сигнал
- два таких сигнала, то сигнал ![]() также не содержит частот, превышающих
также не содержит частот, превышающих ![]() .Непересекающимися являются множества, не имеющие ни одного общего элемента, за исключением нулевого x=0. Например, непересекающимися по частоте являются множества сигналов, спектры которых расположены в различных непересекающихся участках частотного диапазона.Для доказательства теоремы перепишем выражение (4.3) для каких-либо двух множеств канальных сигналов, например, для
.Непересекающимися являются множества, не имеющие ни одного общего элемента, за исключением нулевого x=0. Например, непересекающимися по частоте являются множества сигналов, спектры которых расположены в различных непересекающихся участках частотного диапазона.Для доказательства теоремы перепишем выражение (4.3) для каких-либо двух множеств канальных сигналов, например, для ![]() и
и ![]() :
:
![]() (4.4)
(4.4)
![]() (4.5)
(4.5)
Если выражение (4.5) справедливо для любых сигналов ![]() входящих в множество
входящих в множество ![]() ,то в силу линейности оператора
,то в силу линейности оператора ![]() аналогичное выражение справедливо также для
аналогичное выражение справедливо также для ![]() где
где ![]() и
и ![]() - произвольные числа:
- произвольные числа:![]()
![]()
![]() Следовательно,
Следовательно, ![]() и, по определению, множество
и, по определению, множество ![]() - линейно.Покажем теперь, что множество
- линейно.Покажем теперь, что множество ![]() и
и![]() не должны иметь взаимного пересечения. Предположим обратное, то есть что есть сигнал,
не должны иметь взаимного пересечения. Предположим обратное, то есть что есть сигнал, ![]() принадлежащий как
принадлежащий как ![]() , так и
, так и ![]() . Тогда в соответствии с формулой (4.4), на выходе разделителя
. Тогда в соответствии с формулой (4.4), на выходе разделителя ![]() получим сигнал
получим сигнал ![]() ; но одновременно, в соответствии с формулой (4.5), отклик того же самого разделителя
; но одновременно, в соответствии с формулой (4.5), отклик того же самого разделителя ![]() на тот же сигнал
на тот же сигнал ![]() равен нулю. Из этого противоречия следует, что неравный нулю сигнал
равен нулю. Из этого противоречия следует, что неравный нулю сигнал ![]() не может принадлежать
не может принадлежать ![]() и
и ![]() . Это и означает, по определению, что множества
. Это и означает, по определению, что множества ![]() и
и ![]() не имеют взаимного пересечения. Таким образом, теорема доказана.Известно, что элементы линейных непересекающихся множеств линейно независимы. Из доказанной теоремы следует, что для возможности линейного разделения канальных сигналов необходимо и достаточно, чтобы они были линейно независимы.Функции
не имеют взаимного пересечения. Таким образом, теорема доказана.Известно, что элементы линейных непересекающихся множеств линейно независимы. Из доказанной теоремы следует, что для возможности линейного разделения канальных сигналов необходимо и достаточно, чтобы они были линейно независимы.Функции![]() ,
,![]() ,,
,,![]() являются линейно независимыми, если их линейная комбинация
являются линейно независимыми, если их линейная комбинация ![]() тождественно равны нулю только при a1=a2=…=aN=0. Чтобы установить, являются ли функции
тождественно равны нулю только при a1=a2=…=aN=0. Чтобы установить, являются ли функции ![]() линейно независимыми в промежутке 0<t<T, рассматривают определитель:
линейно независимыми в промежутке 0<t<T, рассматривают определитель:
 (4.6)
(4.6)
 (4.7)
(4.7)
Определитель (4.6), называемый определителем Грама, положителен, если функции ![]() линейно независимы, и равен нулю, если они линейно зависимы. Например, функции
линейно независимы, и равен нулю, если они линейно зависимы. Например, функции ![]() , где
, где ![]() - вещественные числа, линейно независимы. Поэтому сигналы такого вида линейно разделимы и могут быть использованы в качестве канальных сигналов линейной многоканальной системы передачи.Покажем на примере двухканальной системы, как можно построить для таких сигналов схему разделения. Пусть на интервале
- вещественные числа, линейно независимы. Поэтому сигналы такого вида линейно разделимы и могут быть использованы в качестве канальных сигналов линейной многоканальной системы передачи.Покажем на примере двухканальной системы, как можно построить для таких сигналов схему разделения. Пусть на интервале ![]() канальные сигналы имеют вид
канальные сигналы имеют вид ![]()
![]() ; на вход разделительного устройства попадает групповой сигнал
; на вход разделительного устройства попадает групповой сигнал ![]() . Для разделения продифференцируем сигнал
. Для разделения продифференцируем сигнал ![]() :
: ![]() и полученную производную проинтегрируем с переменным верхним пределом
и полученную производную проинтегрируем с переменным верхним пределом  Таким образом, из
Таким образом, из ![]() выделен сигнал
выделен сигнал ![]() . Сигнал
. Сигнал ![]() получим, вычитая
получим, вычитая ![]() из
из ![]() . Структурная схема устройства, выполняющего операцию разделения, показана на рисунке (4.1).
. Структурная схема устройства, выполняющего операцию разделения, показана на рисунке (4.1).
Рисунок 4.1. Схема разделения линейно независимых сигналов
![]()
![]()
ДЦ - дифференцирующая цепь; Инт - интегратор![]() В качестве второго примера рассмотрим функции Легко показать, что эти функции линейно зависимы. Действительно, можно подобрать такие неравные нулю коэффициенты
В качестве второго примера рассмотрим функции Легко показать, что эти функции линейно зависимы. Действительно, можно подобрать такие неравные нулю коэффициенты ![]() ,
, ![]() и
и ![]() , что
, что ![]() . Последнее тождество имеет место, например, при
. Последнее тождество имеет место, например, при ![]() и
и ![]() . Следовательно, линейное разделение таких сигналов невозможно и их нельзя использовать в качестве канальных сигналов линейной многоканальной системы передачи.
. Следовательно, линейное разделение таких сигналов невозможно и их нельзя использовать в качестве канальных сигналов линейной многоканальной системы передачи.
4.2. Формирование канальных сигналов
Итак, канальные сигналы различных каналов линейных многоканальных систем передачи должны быть линейно независимы. Вместе с тем для выполнения основной задачи связи- передачи сообщений - необходимо, чтобы в канальных сигналах были отображены первичные сигналы, соответствующие передаваемым сообщениям. Чтобы выполнить эти условия, построим передающую часть многоканальной системы следующим образом.Выберем некоторый класс R линейно независимых функций ![]()
![]()
![]() и при помощи специального генераторного оборудования сформируем соответствующие этим функциям вспомогательные колебания, которые будем называть переносчиками. Величины
и при помощи специального генераторного оборудования сформируем соответствующие этим функциям вспомогательные колебания, которые будем называть переносчиками. Величины ![]() представляют собой постоянные параметры переносчиков.Поскольку по условию переносчики линейно независимы, каждый из них можно выделить из их суммы линейным разделяющим устройством и, следовательно, их можно использовать в качестве канальных сигналов. Чтобы в каждом из канальных сигналов было также отображено передаваемое сообщение, осуществляют модуляцию переносчиков первичными сигналами. Сущность модуляции состоит в том, что один (или несколько) параметров переносчика изменяют пропорционально первичному сигналу. Например, если в процессе модуляции изменяется параметр
представляют собой постоянные параметры переносчиков.Поскольку по условию переносчики линейно независимы, каждый из них можно выделить из их суммы линейным разделяющим устройством и, следовательно, их можно использовать в качестве канальных сигналов. Чтобы в каждом из канальных сигналов было также отображено передаваемое сообщение, осуществляют модуляцию переносчиков первичными сигналами. Сущность модуляции состоит в том, что один (или несколько) параметров переносчика изменяют пропорционально первичному сигналу. Например, если в процессе модуляции изменяется параметр![]() , то
, то
![]()
4.8
где ![]() - функция, характеризующая изменения модулируемого параметра,
- функция, характеризующая изменения модулируемого параметра, ![]() - значение параметра
- значение параметра ![]() в соответствии модуляции,
в соответствии модуляции, ![]() - максимальная величина приращения параметра в процессе модуляции или девиации параметра,
- максимальная величина приращения параметра в процессе модуляции или девиации параметра, ![]() - нормированный модулирующий первичный сигнал,
- нормированный модулирующий первичный сигнал, ![]() - наибольшее относительное изменение параметра или глубина модуляции.Так, например, в качестве переносчиков можно использовать гармонические колебания
- наибольшее относительное изменение параметра или глубина модуляции.Так, например, в качестве переносчиков можно использовать гармонические колебания ![]() параметрами, которых являются амплитуда
параметрами, которых являются амплитуда ![]() , частота
, частота ![]() и начальная фаза
и начальная фаза ![]() . Любой из этих параметров можно модулировать, получая соответственно три вида модуляции: амплитудную (АМ), частотную (ЧМ) и фазовую (ФМ).Параметры переносчиков можно разделить на две группы. К первой относятся параметры, подвергаемые модуляции; их называют информационными. Ко второй группе – параметры, которыми отличаются друг от друга переносчики различных каналов; их называют разделительными. Возможно построение аппаратуры, где один и тот же параметр играет роль и информационного, и разделительного.Обратимся снова к структурной схеме многоканальной системы (смотри рисунок 1.3). Дополним передающую часть аппаратуры генератором переносчиков (ГП) и подведем к преобразователям
. Любой из этих параметров можно модулировать, получая соответственно три вида модуляции: амплитудную (АМ), частотную (ЧМ) и фазовую (ФМ).Параметры переносчиков можно разделить на две группы. К первой относятся параметры, подвергаемые модуляции; их называют информационными. Ко второй группе – параметры, которыми отличаются друг от друга переносчики различных каналов; их называют разделительными. Возможно построение аппаратуры, где один и тот же параметр играет роль и информационного, и разделительного.Обратимся снова к структурной схеме многоканальной системы (смотри рисунок 1.3). Дополним передающую часть аппаратуры генератором переносчиков (ГП) и подведем к преобразователям ![]() кроме первичных сигналов
кроме первичных сигналов ![]() переносчики
переносчики ![]() , как это показано на рисунке 4.2. В преобразователях
, как это показано на рисунке 4.2. В преобразователях ![]() происходит модуляция переносчиков первичными сигналами, и таким образом формируются канальные сигналы:
происходит модуляция переносчиков первичными сигналами, и таким образом формируются канальные сигналы:
![]() (4.9)
(4.9)
где ![]() - информационный параметр, изменяющийся в соответствии с выражением (2.8);
- информационный параметр, изменяющийся в соответствии с выражением (2.8); ![]() -разделительный параметр, принадлежность сигнала
-разделительный параметр, принадлежность сигнала ![]() i-му каналу. Преобразователи
i-му каналу. Преобразователи ![]() называются модуляторами.
называются модуляторами.
Рисунок 4.2. Структурная схема передающей части многоканальной системы
Наиболее простой является амплитудная модуляция, когда пропорционально модулирующему первичному сигналу изменяется амплитуда переносчика. При этом роль модулятора выполняет перемножитель напряжений, а модулированный (канальный) сигнал имеет вид:
![]() (4.10)
(4.10)
Поскольку длительность передачи сообщений в каждом из каналов произвольна, то переносчики выбираются в классе периодических функций:
![]() (4.11)
(4.11)
где ![]() - период, p- произвольное целое число.В большинстве случаев целесообразно выбирать период так, чтобы на интервале
- период, p- произвольное целое число.В большинстве случаев целесообразно выбирать период так, чтобы на интервале ![]() изменения первичного сигнала были пренебрежимо малы, т.е.
изменения первичного сигнала были пренебрежимо малы, т.е.
![]() при
при ![]() (4.12)
(4.12)
Принимая во внимание, что первичные сигналы являются сигналами с практически ограниченным спектром и, обозначая через ![]() наивысшую частоту спектра первичного сигнала, получаем на основании теоремы Котельникова
наивысшую частоту спектра первичного сигнала, получаем на основании теоремы Котельникова
![]() (4.13)
(4.13)
Сформированные в результате модуляции канальные сигналы содержат в себе сведения, как о первичных сигналах ![]() , так и о переносчиках
, так и о переносчиках ![]() . Сигналы различных каналов отличаются один от другого значениями разделительного параметра
. Сигналы различных каналов отличаются один от другого значениями разделительного параметра ![]() . Каждому каналу соответствует некоторая область
. Каждому каналу соответствует некоторая область ![]() значений разделительного параметра, причем эти области не должны пересекаться. В приемной части аппаратуры известны области
значений разделительного параметра, причем эти области не должны пересекаться. В приемной части аппаратуры известны области ![]() каждого канала. Разделение канальных сигналов оказывается возможным, так как множество сигналов
каждого канала. Разделение канальных сигналов оказывается возможным, так как множество сигналов ![]() , соответствующих некоторой области
, соответствующих некоторой области ![]() , принадлежит i-му каналу, тогда как множество сигналов
, принадлежит i-му каналу, тогда как множество сигналов ![]() , соответствующих некоторой не перекрывающейся области
, соответствующих некоторой не перекрывающейся области ![]() , принадлежит j-му каналу. После разделения из каждого канального сигнала нужно выделить сигнал, соответствующий изменениям информационного параметра
, принадлежит j-му каналу. После разделения из каждого канального сигнала нужно выделить сигнал, соответствующий изменениям информационного параметра ![]() , то есть восстановить первичный сигнал
, то есть восстановить первичный сигнал ![]() . Эта операция, обратная модуляция, производится устройствами
. Эта операция, обратная модуляция, производится устройствами ![]() , которые называют демодуляторами. В современной технике многоканальной связи в качестве переносчиков используют колебания различного вида. Наибольшее применение находят гармонические (синусоидальные) колебания либо периодические последовательности прямоугольных импульсов. В первом случае возможна амплитудная, частотная или фазовая модуляция. Если в различных каналах в качестве переносчиков используются колебания с различными частотами (или, как говорят, различные несущие частоты) и в результате модуляции получают канальные сигналы, спектры которых размещаются в не перекрывающихся в частотных полосах, то такие системы называют системами с разделением каналов по частоте. Если разделительным параметром гармонического переносчика является начальная фаза, то имеет место разделение каналов по фазе. При этом обычно применяется амплитудная модуляция.
, которые называют демодуляторами. В современной технике многоканальной связи в качестве переносчиков используют колебания различного вида. Наибольшее применение находят гармонические (синусоидальные) колебания либо периодические последовательности прямоугольных импульсов. В первом случае возможна амплитудная, частотная или фазовая модуляция. Если в различных каналах в качестве переносчиков используются колебания с различными частотами (или, как говорят, различные несущие частоты) и в результате модуляции получают канальные сигналы, спектры которых размещаются в не перекрывающихся в частотных полосах, то такие системы называют системами с разделением каналов по частоте. Если разделительным параметром гармонического переносчика является начальная фаза, то имеет место разделение каналов по фазе. При этом обычно применяется амплитудная модуляция.
При использовании в качестве переносчиков периодических последовательностей прямоугольных импульсов возможна их модуляция по амплитуде (амплитудно-импульсная модуляция – АИМ), по длительности или ширине (широтно-импульсная модуляция – ШИМ), по фазе (фазоимпульсная модуляция – ФИМ) и по частоте (частотно-импульсная модуляция – ЧИМ). В системах с импульсными переносчиками имеет место разделение каналов по времени: передача осуществляется так, что элементы сигнала, принадлежащего данному каналу, передаются в те промежутки времени, когда тракт свободен от сигналов других каналов. Наиболее общий вид разделения – разделение по форме канальных сигналов, когда их частотные спектры перекрываются, и передача во всех каналах происходит одновременно. В системах с разделением по форме в качестве переносчиков могут быть использованы электрические колебания, описываемые функциями Якоби, Лежандра, Лаггера, Уолша и множества других линейно независимых систем функций.
5. Системы передачи с разделением каналов по частоте
5.1. Разделение каналов по частоте
В практике современной многоканальной связи преимущественное распространение получили многоканальные системы с частотным разделением каналов (ЧРК). В системах с ЧРК спектры канальных сигналов размещаются в неперекрывающихся частотных полосах. Смещение спектров первичных сигналов в области, соответствующие канальным сигналам, осуществляется при помощи частотной, амплитудной или фазовой модуляции; несущие частоты подбираются так, чтобы спектры модулированных колебаний не перекрывались. В приемной части аппаратуры канальные сигналы разделяются частотными фильтрами.
Рисунок 5.1. Структурная схема многоканальной системы связи с разделением каналов по частоте
На рисунке 5.1 показана упрощенная структурная схема многоканальной системы связи с разделением каналов по частоте. Предположим, что система предназначена для одновременной передачи трех сигналов, каждый из которых занимает полосу частотой от 300 до 3400 Гц. Формирование канальных сигналов в передающей части аппаратуры производится балансными модуляторами, на которые подаются синусоидальные колебания несущих частот F1=8кГц, F2=12кГц и F3=16кГц. На рисунке 5.1 показаны спектральные диаграммы сигналов в различных точка схемы. Спектры первичных сигналов показаны на рисунке 5.1а, б, в.Как известно, балансными модуляторами осуществляется операция перемножения колебаний несущей частоты и сигнала. Так, например, на выходе модулятора первого канала сигнал можно представить в виде ![]() . Спектры таких сигналов содержат верхнюю и нижнюю боковые полосы частот, что показано на спектральных диаграммах рисунок 5.1г, д, е.Полосовые фильтры, установленные на выходах модуляторов, в каждом из каналов выделяют верхние и подавляют нижние боковые полосы частот. Спектр группового сигнала состоит из трех полос и занимает общий диапазон частот от 4,6 до 11,7кГц. На приемном конце разделения канальных сигналов производится полосовыми разделительными фильтрами; спектральные диаграммы сигналов на выходе разделительных фильтров показаны на рисунке 5.1з, и, к. Для восстановления исходных сигналов
. Спектры таких сигналов содержат верхнюю и нижнюю боковые полосы частот, что показано на спектральных диаграммах рисунок 5.1г, д, е.Полосовые фильтры, установленные на выходах модуляторов, в каждом из каналов выделяют верхние и подавляют нижние боковые полосы частот. Спектр группового сигнала состоит из трех полос и занимает общий диапазон частот от 4,6 до 11,7кГц. На приемном конце разделения канальных сигналов производится полосовыми разделительными фильтрами; спектральные диаграммы сигналов на выходе разделительных фильтров показаны на рисунке 5.1з, и, к. Для восстановления исходных сигналов ![]() напряжения с выводов полосовых разделительных фильтров попадаются на демодуляторы, в качестве которых можно использовать (как и на передаче) балансовые схемы. При этом на демодуляторы, кроме канальных сигналов
напряжения с выводов полосовых разделительных фильтров попадаются на демодуляторы, в качестве которых можно использовать (как и на передаче) балансовые схемы. При этом на демодуляторы, кроме канальных сигналов ![]() ,
, ![]() , и
, и ![]() , должны быть поданы напряжения несущих частот F1, F2 и F3. На выходах демодуляторов устанавливаются фильтры нижних частот, подавляющие высокочастотные спектральные компоненты, которые появляются в процессе демодуляции. Покажем, что сигналы на выходах полосовых фильтров передающей части аппаратуры ортогональны в частотной области. Рассмотрим для этого N-канальную аппаратуру, построенную в соответствии с принципами, которые иллюстрирует схема рисунок 5.1. Обозначим через
, должны быть поданы напряжения несущих частот F1, F2 и F3. На выходах демодуляторов устанавливаются фильтры нижних частот, подавляющие высокочастотные спектральные компоненты, которые появляются в процессе демодуляции. Покажем, что сигналы на выходах полосовых фильтров передающей части аппаратуры ортогональны в частотной области. Рассмотрим для этого N-канальную аппаратуру, построенную в соответствии с принципами, которые иллюстрирует схема рисунок 5.1. Обозначим через ![]() ,
, ![]() , …,
, …, ![]() aспектры индивидуальных сигналов на выходах полосовых фильтров передачи: для них справедливы условия (рисунок 5.2)
aспектры индивидуальных сигналов на выходах полосовых фильтров передачи: для них справедливы условия (рисунок 5.2)
Рисунок 5.2. Спектры канальных сигналов
 (5.1)
(5.1)
Общий диапазон частот, занимаемый спектром группового сигнала ![]() , находится в области от
, находится в области от ![]() до
до ![]() . Спектры канальных сигналов не перекрываются, т. е. сигналы
. Спектры канальных сигналов не перекрываются, т. е. сигналы ![]() ,
, ![]() , …,
, …, ![]() образуют N непересекающихся по частоте множеств. В силу этого
образуют N непересекающихся по частоте множеств. В силу этого
 (5.2)
(5.2)
где Ai–некоторая константа, величина которой определяется энергией i-го индивидуального сигнала. Выражение (5.2) показывает, что спектры канальных сигналов ортогональны.
5.2. Формирование канальных сигналов
Общие сведения.
В системах с ЧРК в качестве переносчиков используются гармонические колебания – несущие частоты. Представим несущие колебания в виде
![]() (5.3)
(5.3)
Канальный сигнал формируется путем модуляции одного или нескольких параметров несущего колебания первичным сигналом с(t). Модулированную несущую – канальный сигнал – можно представить в виде
![]() , (5.4)
, (5.4)
где U(t), ![]() - соответственно огибающая и фаза модулированного колебания.
- соответственно огибающая и фаза модулированного колебания.
В зависимости от того, какой параметр несущего колебания модулирован несущим сигналом, возможны следующие виды модуляции:
-
- амплитудная (АМ)
![]() при
при ![]() (5.5)
(5.5)
-
- угловая (УМ)
![]() при
при ![]() (5.6)
(5.6)
- смешанная (амплитудно-угловая)
 (5.7)
(5.7)
В многоканальных системах обычно используется линейная зависимость амплитуды ![]() или фазы
или фазы ![]() от
от ![]() . Поэтому будем рассматривать линейную модуляцию (возможна и нелинейная модуляция, например, при решении задач по сжатию динамического диапазона передаваемых сообщений).При угловой модуляции различают частотную (ЧМ) и фазовую (ФМ) модуляции. При линейной фазовой модуляции амплитуда несущей постоянна, а фаза несущей связана линейной зависимостью с первичным сигналом:
. Поэтому будем рассматривать линейную модуляцию (возможна и нелинейная модуляция, например, при решении задач по сжатию динамического диапазона передаваемых сообщений).При угловой модуляции различают частотную (ЧМ) и фазовую (ФМ) модуляции. При линейной фазовой модуляции амплитуда несущей постоянна, а фаза несущей связана линейной зависимостью с первичным сигналом:
![]() (5.8)
(5.8)
где ![]() - коэффициент девиации фазы.
- коэффициент девиации фазы.
При линейной частотной модуляции амплитуда несущего колебания постоянна, а частота несущей связана линейной зависимостью с первичным сигналом:
![]() (5.9)
(5.9)
где ![]() - коэффициент девиации частоты.
- коэффициент девиации частоты.
При линейной амплитудной модуляции частота и начальная фаза несущего колебания постоянны, а амплитуда несущей ![]() линейно зависит от модулирующего первичного сигнала:
линейно зависит от модулирующего первичного сигнала:
![]() (5.10)
(5.10)
где ![]() - коэффициент глубины модуляции. Предположим, что первичный сигнал представляет собой сложное периодическое колебание, спектр которого ограничен полосой частот первичного сигнала
- коэффициент глубины модуляции. Предположим, что первичный сигнал представляет собой сложное периодическое колебание, спектр которого ограничен полосой частот первичного сигнала ![]() т.е.
т.е.
![]() (5.11)
(5.11)
Таким образом, при рассмотрении различных видов модуляции модулирующий первичный сигнал можно представлять как сумму большого количества гармонических составляющих. Для упрощения положим, что модуляция осуществляется гармоническим колебанием
![]() (5.12)
(5.12)
При этом можно сравнительно легко провести анализ, а затем распространит выводы на случай сложного модулирующего колебания.
Амплитудная модуляция.
При модуляции амплитуды несущей гармоническим колебанием АМ колебание имеет вид

5.13
Величину
![]()
5.14
называют глубиной амплитудной модуляции. При линейной АМ ![]() .
.
С учетом формулы (5.14) выражение (5.13) будет иметь вид
![]()
5.15
Спектр АМ колебания состоит из несущего колебания и двух боковых полос, симметричных относительно несущей. Полная ширина спектра канального сигнала при АМ равна удвоенной наивысшей частоте спектра первичного сигнала ![]() (рисунок 5.3).
(рисунок 5.3).
Рисунок 5.3. Спектр первичного сигнала
Мощность АМ колебания слагается из мощности несущей ![]() и мощностей двух боковых:
и мощностей двух боковых:
![]() (5.16)
(5.16)
Отношение мощности боковой полосы к мощности несущей равно
![]() (5.17)
(5.17)
Учитывая, что ![]()
![]() (5.18)
(5.18)
Из полученных соотношений видно, что средняя мощность несущей при АМ остается неизменной, а среняя мощность всего АМ колебания возрастает на величину ![]() ; при этом мощность может возрасти не более чем в 1,5 раза. Видно, что с энергетической точки зрения АМ весьма несовершенный вид модуляции, так как основная мощность АМ колебания заключена в несущем колебании, которое не содержит полезной информации, а нижняя и верхняя боковые полосы несут одинаковую информацию.
; при этом мощность может возрасти не более чем в 1,5 раза. Видно, что с энергетической точки зрения АМ весьма несовершенный вид модуляции, так как основная мощность АМ колебания заключена в несущем колебании, которое не содержит полезной информации, а нижняя и верхняя боковые полосы несут одинаковую информацию.
Частотная и фазовая модуляции.
Предположим, что модулирующий сигнал представляет собой гармоническое колебание. Тогда
![]()
![]() (5.19)
(5.19)
Величина ![]() называется девиацией частоты. Учитывая, что фаза и частота связаны отношением
называется девиацией частоты. Учитывая, что фаза и частота связаны отношением
 (5.20)
(5.20)
запишем ЧМ колебания в виде
 (5.21)
(5.21)
здесь ![]() - индекс частотной модуляции. Спектры ЧМ и ФМ колебаний даже при модуляции одним гармоническим колебанием состоят из бесконечного количества дискретных составляющих, образуют верхнюю и нижнюю боковые полосы спектра, симметричные относительно несущей и имеющие одинаковые амплитуды
- индекс частотной модуляции. Спектры ЧМ и ФМ колебаний даже при модуляции одним гармоническим колебанием состоят из бесконечного количества дискретных составляющих, образуют верхнюю и нижнюю боковые полосы спектра, симметричные относительно несущей и имеющие одинаковые амплитуды ![]() . Фазы четных боковых совпадают, а нечетных – противоположны. Амплитуды несущей и боковых составляющих ЧМ и ФМ колебаний определяются функциями Бесселя соответствующего порядка в зависимости от индекса частотной модуляции
. Фазы четных боковых совпадают, а нечетных – противоположны. Амплитуды несущей и боковых составляющих ЧМ и ФМ колебаний определяются функциями Бесселя соответствующего порядка в зависимости от индекса частотной модуляции ![]() и индекса фазовой модуляции
и индекса фазовой модуляции ![]() соответственно (рисунок 5.4).
соответственно (рисунок 5.4).
Рисунок 5.4. Спектр ЧМ (а) и ФМ (б) колебаний при модуляции гармоническим колебанием
Как видно из рисунка 5.4, значительная часть спектральных составляющих боковых полос, начиная с k=n и выше, имеет настолько малые амплитуды, что с ними можно не считаться. Обычно не считаются с боковыми составляющими, амплитуды которых не превышают 0,01 от амплитуды немодулированной несущей частоты. Это означает, что ширина передаваемой полосы частот канального сигнала должна определяться из условия
![]() (5.22)
(5.22)
где n – номер последней учитываемой боковой составляющей, который зависит от индекса частотной или фазовой модуляции. Полоса частот, отводимая на один канал, равна реально учитываемой ширине спектра канального сигнала при ЧМ или ФМ:
![]() (5.23)
(5.23)
где ![]() - наивысшая частота первичного сигнала.
- наивысшая частота первичного сигнала.
Различие ЧМ и ФМ заключается в том, что индекс частотной модуляции при ЧМ обратно пропорционален частоте модулирующего сигнала, а при ФМ индекс фазовой модуляции постоянен и от частоты модулирующего сигнала не зависит. Это приводит к некоторому различию спектров ЧМ и ФМ, проявляющемуся в том, что спектры этих видов модуляции по-разному зависят от частоты модулирующего колебания F. С ростом модулирующей частоты F ширина спектра ФМ колебания растет пропорционально F, а ширина спектра ЧМ увеличивается значительно меньше, чем ширина спектра ФМ. Поэтому на практике предпочтение отдают ЧМ.Помехоустойчивость ЧМ и ФМ систем тем выше, чем выше индекс модуляции. Частотную и фазовую модуляции применяют в тех случаях, когда многоканальная система работает в условиях больших помех и приходится применять помехоустойчивые виды модуляции, например, при передачи по радиолинейным линиям, по линиям через искусственные спутники Земли и другое. В этом случае ЧМ используется для преобразования группового многоканального сигнала. Но даже в этих системах групповой сигнал формируется из первичных сигналов методами амплитудной модуляции.Частотная и фазовая модуляции применяются также в системах передачи данных и телеграфных сигналов. Применение ограничителей амплитуд на приеме позволяет ЧМ и ФМ уменьшить влияние колебаний уровня, помех и искажений в каналах и тем самым снизить вероятность ошибок при приеме сигналов. Так, в отечественной многоканальной системе тонального телеграфирования с ЧМ, работающей по канальной ТЧ, используется индекс частотной модуляции![]() . Частотная модуляция также применяется и в некоторых системах передачи факсимильных сигналов по каналам ТЧ.Основными методами формирования канальных сигналов в системах с ЧРК являются методы амплитудной модуляции, позволяющие наиболее эффективно использовать спектр частот.Для восстановления первичного сигнала из АМ колебания на приеме не обязательно передавать по каналу весь спектр АМ колебаний, так как боковые полосы частот несут одинаковую информацию. Поэтому, в зависимости от области применения многоканальных систем связи и специфики их работы, оказывается целесообразным применение различных методов передачи амплитудно-модулированных канальных сигналов. Ниже рассматриваются эти методы.
. Частотная модуляция также применяется и в некоторых системах передачи факсимильных сигналов по каналам ТЧ.Основными методами формирования канальных сигналов в системах с ЧРК являются методы амплитудной модуляции, позволяющие наиболее эффективно использовать спектр частот.Для восстановления первичного сигнала из АМ колебания на приеме не обязательно передавать по каналу весь спектр АМ колебаний, так как боковые полосы частот несут одинаковую информацию. Поэтому, в зависимости от области применения многоканальных систем связи и специфики их работы, оказывается целесообразным применение различных методов передачи амплитудно-модулированных канальных сигналов. Ниже рассматриваются эти методы.
Рисунок 5.5. Спектры частот при различных методах формирования амплитудно-модулированных канальных сигналов
1. Передача двух боковых полос частот и несущей (рисунок 5.5а). Для этого случая полоса частот, отводимая для одного канального сигнала,
![]() (5.24)
(5.24)
2. Передача одной боковой полосы частот и несущей (рисунок 5.5б)
![]() (5.25)
(5.25)
3. Передача одной боковой полосы частот (рисунок 5.5в) без несущей:
![]() (5.26)
(5.26)
4. Передача двух боковых полос частот без несущей (рисунок 5.5г)
![]()
5. Передача одной боковой полосы частот, несущей и части второй боковой полосы частот (рисунок 5.5д)
![]() (5.27)
(5.27)
где ![]() - максимальная частота первичного сигнала, передаваемого на второй (частично подавленной) боковой полосе частот. Обычно для этого метода
- максимальная частота первичного сигнала, передаваемого на второй (частично подавленной) боковой полосе частот. Обычно для этого метода ![]() .
.
Из сравнения спектров канальных сигналов видно, что наиболее выгодным с точки зрения использования полосы частот является однополосный (ОБП) способ формирования канальных сигналов, так как он обеспечивает получение максимального количества каналов в заданной полосе частот.
Передача двух боковых полос и несущей.
Это наиболее простой способ формирования канальных сигналов, так как обеспечивается относительно простыми технологическими средствами: амплитудным модулятором и простым полосовым фильтром (рисунок 5.6). Кроме того, на приеме первичный сигнал воспроизводится непосредственно из канального сигнала путем взаимодействия несущей с нижней и верхней боковыми полосами частот и нет необходимости в специальном генераторе несущей на приеме.
Рисунок 5.6. Структурная схема передачи двух боковых полос и несущей (а); формирование спектра канального сигнала на передаче (б); восстановление спектра первичного сигнала на приеме (в)
Квадратичный детектор с характеристикой ![]() для демодуляции АМ сигнала не пригоден, так как возникают нелинейные искажения, которые нельзя устранить фильтром на выходе демодулятора. Поэтому при передаче двух боковых и несущей в качестве демодулятора используют линейный детектор, выходное напряжение которого равно абсолютному значению входного:
для демодуляции АМ сигнала не пригоден, так как возникают нелинейные искажения, которые нельзя устранить фильтром на выходе демодулятора. Поэтому при передаче двух боковых и несущей в качестве демодулятора используют линейный детектор, выходное напряжение которого равно абсолютному значению входного:
![]() (5.28)
(5.28)
Если при прохождении канального сигнала по групповому тракту фазовые соотношения не нарушались, то канальный сигнал можно описать выражением (5.24); тогда при линейной АМ получим
![]() (5.29)
(5.29)
Мощность боковых составляет очень малую величину – основная мощность АМ колебания приходится на несущее колебание, не содержащее полезной информации. Это является причиной многих других недостатков рассматриваемого метода – низкой помехоустойчивости, чрезмерной загрузкой групповых устройств мощными токами несущих частот. Кроме того, полоса частот, занимаемая каналом при передаче несущей и двух боковых, в 2 раза больше максимально передаваемой частоты сигнала.Указанные недостатки метода передачи несущей и двух боковых существенно сужают область применения этого метода. В многоканальных системах этот метод почти не применяется. Однако простота передачи (простые канальные фильтры) и простота приемника (демодулятор не требует местного генератора несущей) делают системы с двумя боковыми и несущей выгодными в тех случаях, когда оконечные станции должны быть как можно проще и дешевле, а промежуточных усилителей мало или вообще нет. Такие требования, например, применяются в радиовещании, где основное – простота и дешевизна радиоприемников и абонентов.
Передача одной боковой полосы и несущей.
Так как каждая из двух боковых полос частот переносит полную информацию о первичном сигнале, то без ущерба для передачи информации можно одну из боковых подавлять и не передавать. Тем самым в два раза сужается полоса частот, отводимая на один канал (рисунок 5.5б). При этом можно в два раза увеличить число каналов в одной и той же полосе частот. Однако подавление одной из боковых представляет серьезную инженерную задачу – требуется сложный канальный фильтр.
Рисунок 5.7. Векторная диаграмма передачи одной боковой и несущей
Кроме того, при передаче несущей и одной боковой, как видно из векторной диаграммы (рисунок 5.7), подавление одной из боковых полос вызывает появление квадратурных искажений даже при идеальной амплитудно-частотной и фазовой характеристиках тракта. Например, при подавлении верхней боковой полосы ![]() канальный сигнал получается из выражения
канальный сигнал получается из выражения
![]() (5.30)
(5.30)
где ![]() - синфазная составляющая – совпадает по фазе с несущей на выходе тракта;
- синфазная составляющая – совпадает по фазе с несущей на выходе тракта; ![]() - квадратурная составляющая – сдвинута по фазе на
- квадратурная составляющая – сдвинута по фазе на ![]() относительно несущей.
относительно несущей.
![]() (5.31)
(5.31)
Амплитуда синфазной составляющей равна
 (5.32)
(5.32)
а квадратичной составляющей
![]() (5.33)
(5.33)
Огибающая такого канального сигнала равна
 (5.34)
(5.34)
Низкая помехоустойчивость, квадратурные искажения, загрузка групповых устройств передачей несущих и трудность реализации канальных фильтров являются серьезными недостатками, из-за которых метод передачи одной боковой и несущей не получил широкого распространения.
Передача одной боковой полосы, несущей и части второй боковой полосы.
При передаче импульсных сигналов, например, телевизионных фототелеграфных, передаче данных и других полностью подавить одну из боковых полос частот не представляется возможным, так как спектр частот таких первичных сигналов начинается от очень низких частот ![]() (рисунок 5.8а). Промежуток между верхней и нижней
(рисунок 5.8а). Промежуток между верхней и нижней
Рисунок 5.8. Преобразование спектров при передаче одной боковой полосы, несущей и части второй боковой
боковыми полосами частот отсутствует или очень мал, и для полного подавления одной из боковых необходим идеальный полосовой фильтр. При использовании для этой цели реального полосового фильтра остается часть второй боковой, например, нижней, как показано на рисунке 5.8б. При восстановлении сигнала на приеме возникают амплитудно-частотные искажения нижней части спектра первичного сигнала (рисунок 5.8в). Эти искажения возникают вследствие того, что колебания в спектре![]() получаются от одной боковой полосы (верхней), а колебания в спектре
получаются от одной боковой полосы (верхней), а колебания в спектре![]() - от двух боковых полос частот, что приводит к удваиванию амплитуды восстановленного сигнала в спектре
- от двух боковых полос частот, что приводит к удваиванию амплитуды восстановленного сигнала в спектре![]() .Чтобы устранить указанные искажения, применяют фильтр Найковиста, частотная характеристика коэффициента передачи которого позволяет сформировать спектр АМ колебаний сигнала таким образом (рисунок 5.8г), что первичный сигнал может быть восстановлен без искажений, как это показано на рисунке 5.8д. Это достигается благодаря симметрии коэффициента передачи фильтра Найковиста относительно частоты несущей, в результате чего определенным образом уменьшаются амплитуды частотных составляющих части спектра верхней боковой
.Чтобы устранить указанные искажения, применяют фильтр Найковиста, частотная характеристика коэффициента передачи которого позволяет сформировать спектр АМ колебаний сигнала таким образом (рисунок 5.8г), что первичный сигнал может быть восстановлен без искажений, как это показано на рисунке 5.8д. Это достигается благодаря симметрии коэффициента передачи фильтра Найковиста относительно частоты несущей, в результате чего определенным образом уменьшаются амплитуды частотных составляющих части спектра верхней боковой ![]() . Спектр частот остатка нижней боковой сформирован так, что при восстановлении сигнала на приеме остаток нижней боковой дополняет спектр сигнала в полосе частот
. Спектр частот остатка нижней боковой сформирован так, что при восстановлении сигнала на приеме остаток нижней боковой дополняет спектр сигнала в полосе частот ![]() , доводя значения амплитуд частотных составляющих до значений, при которых отсутствуют амплитудно-частотные искажения (рисунок 5.8д).При передаче широкополосных сигналов (например, телевизионных) рассмотренный метод передачи дает значительный эффект, так как полоса частот, отводимая для передачи канального сигнала, значительно уменьшается
, доводя значения амплитуд частотных составляющих до значений, при которых отсутствуют амплитудно-частотные искажения (рисунок 5.8д).При передаче широкополосных сигналов (например, телевизионных) рассмотренный метод передачи дает значительный эффект, так как полоса частот, отводимая для передачи канального сигнала, значительно уменьшается ![]() по сравнению с методом передачи двух боковых полос и несущей. Однако, как было показано, подавление одной из боковых приводит к возникновению квадратурных искажений, которые сильно снижают качество передачи. Квадратурные искажения можно уменьшить путем уменьшения коэффициента модуляции m и расширения полосы частот остатка второй боковой. Однако применение этих мер ограничивается влиянием помех, так как уменьшение m приводит к помехоустойчивости, а расширение полосы частот неэкономично. Квадратурные искажения можно полностью устранить, применяя синхронное детектирование (рисунок 5.9). При этом методе сигнал восстанавливается в демодуляторе путем перемножения канального сигнала с колебанием несущей частоты, синхронной с несущей частотой передачи. Такой метод ведет к усложнению приемника – требуются дополнительно генератор несущей частоты на приеме и система синхронизации СС (рисунок 5.9). ТЕМ не менее, во многих случаях (например, в телевидении) это себя окупает.
по сравнению с методом передачи двух боковых полос и несущей. Однако, как было показано, подавление одной из боковых приводит к возникновению квадратурных искажений, которые сильно снижают качество передачи. Квадратурные искажения можно уменьшить путем уменьшения коэффициента модуляции m и расширения полосы частот остатка второй боковой. Однако применение этих мер ограничивается влиянием помех, так как уменьшение m приводит к помехоустойчивости, а расширение полосы частот неэкономично. Квадратурные искажения можно полностью устранить, применяя синхронное детектирование (рисунок 5.9). При этом методе сигнал восстанавливается в демодуляторе путем перемножения канального сигнала с колебанием несущей частоты, синхронной с несущей частотой передачи. Такой метод ведет к усложнению приемника – требуются дополнительно генератор несущей частоты на приеме и система синхронизации СС (рисунок 5.9). ТЕМ не менее, во многих случаях (например, в телевидении) это себя окупает.
Рисунок 5.9. Схема передачи АМ сигнала с синхронным детектором
Рассмотрим требования, предъявляемые к точности синхронизации генераторов несущей передачи и приема. Предположим, что квадратурные искажения максимальны, то есть вторая боковая подавлена полностью. В этом случае передаются несущая и одна боковая полоса, например нижняя, и канальный сигнал определяется выражением (5.31) или
![]() (5.35)
(5.35)
где ![]() и
и ![]() - амплитуды синфазной и квадратурной составляющих, определяемые выражениями (5.32) и (5.33).Перемножая канальный сигнал (5.35) с синхронной несущей, отличающейся от несущей передачи только начальной фазой
- амплитуды синфазной и квадратурной составляющих, определяемые выражениями (5.32) и (5.33).Перемножая канальный сигнал (5.35) с синхронной несущей, отличающейся от несущей передачи только начальной фазой ![]()
![]() (5.36)
(5.36)
получим ![]()
Фильтр низких частот выделит только низкочастотные составляющие:
![]() (5.37)
(5.37)
Из выражения (5.37) видно, что для полного устранения квадратурных искажений необходимо, чтобы![]() , то есть требуется синфазность генераторов несущей передачи и приема; при этом сигнал восстанавливается без искажений:
, то есть требуется синфазность генераторов несущей передачи и приема; при этом сигнал восстанавливается без искажений:
![]() (5.38)
(5.38)
На практике допускают ![]() в этом случае квадратурные искажения не превышают 4%.
в этом случае квадратурные искажения не превышают 4%.
Передача двух боковых полос без несущей.
При создании многоканальных систем, работающих на коротких магистралях, стремятся к упрощению и удешевлению оконечных станций этих систем, так как стоимость оконечных устройств существенно влияет на стоимость всей магистрали при ее небольшой протяженности. Это привело к попыткам создания экономичных систем с передачей двух боковых без несущего колебания. В этом случае при формировании канальных сигналов не требуется сложных полосовых фильтров, а подавление несущей дает возможность увеличить мощность боковых частот и тем самым повысить помехоустойчивость систем. При этом уменьшается и загрузка групповых усилителей, так как при отсутствии первичного сигнала мощность канального сигнала равна нулю, в отличие от методов несущего колебания, у которых при отсутствие первичного сигнала мощность канального сигнала уменьшается незначительно.Однако при передаче двух боковых полос требуется усложнение приемника – для восстановления сигнала требуется синхронизированное детектировани, в противном случае возникают биения сигнала.При передаче сложного сигнала на выход канала поступает сигнал, спектр которого определяется спектрами, смещенными на величину ![]() вверх и вниз по оси частот относительно исходного спектра сигнала (рисунок 5.10). Как видно из выражения
вверх и вниз по оси частот относительно исходного спектра сигнала (рисунок 5.10). Как видно из выражения ![]() , это приводит к колебаниям амплитуды сигнала
, это приводит к колебаниям амплитуды сигнала ![]() от
от ![]() при
при ![]() до
до ![]() при
при ![]() (где k=0, 1, 2, …). Таким образом, возникают биения, при которых связь становится невозможной.
(где k=0, 1, 2, …). Таким образом, возникают биения, при которых связь становится невозможной.
Рисунок 5.10. Влияние расхождения несущих частот на передаче и приеме при передаче двух боковых полос без несущей
Биения будут отсутствовать, если ![]() . Следовательно, при передаче двух боковых полос необходима полная синхронность (и синфазность) несущих колебаний передачи и приема. Один из вариантов систем синхронизации показан на рисунке 5.11.
. Следовательно, при передаче двух боковых полос необходима полная синхронность (и синфазность) несущих колебаний передачи и приема. Один из вариантов систем синхронизации показан на рисунке 5.11.
Рисунок 5.11. Выделение несущей частоты из канального сигнала
Здесь несущее колебания получается из канального сигнала путем нелинейного взаимодействия верхней и нижней боковых частот, при котором образуются колебания с частотами![]() и
и ![]() . Выделив при помощи полосового фильтра колебание с частотой
. Выделив при помощи полосового фильтра колебание с частотой ![]() и поделив частоту на два, получим колебание несущей частоты, которое используется для синхронизации частоты местного генератора несущего колебания. При таком методе передачи во избежание квадратурных искажений необходимо обеспечить в диапазоне частот канального сигнала постоянство амплитудно-частотной и линейность фазовой характеристик тракта.
и поделив частоту на два, получим колебание несущей частоты, которое используется для синхронизации частоты местного генератора несущего колебания. При таком методе передачи во избежание квадратурных искажений необходимо обеспечить в диапазоне частот канального сигнала постоянство амплитудно-частотной и линейность фазовой характеристик тракта.
Передача одной боковой полосы.
Из всех рассмотренных методов АМ метод передачи одной боковой полосы частот (ОБП) дает возможность наиболее экономично использовать линейный спектр частот, так как ширина спектра канального сигнала при ОБП минимальна и равна ширине спектра канального сигнала ![]() . Кроме того, при ОБП отсутствуют квадратурные искажения. Положительным является так же то, что отсутствие несущего колебания в спектре ОБП дает возможность значительно повысить мощность боковой полосы частот при той же мощности канального сигнала и тем самым обеспечить наибольшую помехоустойчивость ОБП по сравнению с другими методами АМ. В качестве недостатка следует отметить, что для восстановления сигнала на приеме необходимо иметь местный генератор несущей частоты (рисунок 5.12). Для восстановления сигнала без искажений необходимо, чтобы частоты несущих колебаний передачи и приема совпадали, в противном случае спектр восстановленного сигнала окажется смещенным на величину расхождения несущих частот передачи и приема
. Кроме того, при ОБП отсутствуют квадратурные искажения. Положительным является так же то, что отсутствие несущего колебания в спектре ОБП дает возможность значительно повысить мощность боковой полосы частот при той же мощности канального сигнала и тем самым обеспечить наибольшую помехоустойчивость ОБП по сравнению с другими методами АМ. В качестве недостатка следует отметить, что для восстановления сигнала на приеме необходимо иметь местный генератор несущей частоты (рисунок 5.12). Для восстановления сигнала без искажений необходимо, чтобы частоты несущих колебаний передачи и приема совпадали, в противном случае спектр восстановленного сигнала окажется смещенным на величину расхождения несущих частот передачи и приема ![]() (рисунок 5.13). Это явление носит название сдвига частоты в канале. Смещение всех составляющих спектра сигнала при передачи речи и музыки приводит к искажениям, снижающим качество передачи. Для каналов тональной частоты допускается сдвиг частоты в канале
(рисунок 5.13). Это явление носит название сдвига частоты в канале. Смещение всех составляющих спектра сигнала при передачи речи и музыки приводит к искажениям, снижающим качество передачи. Для каналов тональной частоты допускается сдвиг частоты в канале ![]() Гц. Для обеспечения таких требований нужны высокостабильные генераторы.
Гц. Для обеспечения таких требований нужны высокостабильные генераторы.
Рисунок 5.12. Схемапередачи с одной боковой полосой
Рисунок 5.13. Влияние расхождения несущих частот на передаче и приеме при ОБП
Расхождение частот генераторов несущих передачи и приема при недостаточном подавлении второй боковой полосы частот приводит к нежелательному дополнительному явлению – колебанию остаточного затухания канала ![]() .величину колебания остаточного затухания канала определим как
.величину колебания остаточного затухания канала определим как
![]() (5.39)
(5.39)
Применяя разложение в степенной ряд выражения (5.39) и ограничиваясь одним членом разложения при kб1, получаем
![]() (5.40)
(5.40)
где ![]() - затухание подавления, показывающее, на сколько децибел уровень ненужной боковой ниже уровня полезной боковой.Из формулы (5.40) можно определить необходимое затухание подавления ненужной боковой при допустимой величине колебаний остаточного затухания:
- затухание подавления, показывающее, на сколько децибел уровень ненужной боковой ниже уровня полезной боковой.Из формулы (5.40) можно определить необходимое затухание подавления ненужной боковой при допустимой величине колебаний остаточного затухания:
![]() (5.41)
(5.41)
Например, при передаче телефонных сигналов допускается ![]() дБ. При этом требуется
дБ. При этом требуется ![]() дБ.Достоинства метода ОБП, такие, как экономное использование спектра частот и высокая помехоустойчивость, сделали его основным методом формирования канальных сигналов для подавляющего большинства многоканальных систем с ЧРК. При передаче с одной боковой полосой важнейшей задачей является формирование однополосного сигнала при необходимой степени подавления ненужной боковой.
дБ.Достоинства метода ОБП, такие, как экономное использование спектра частот и высокая помехоустойчивость, сделали его основным методом формирования канальных сигналов для подавляющего большинства многоканальных систем с ЧРК. При передаче с одной боковой полосой важнейшей задачей является формирование однополосного сигнала при необходимой степени подавления ненужной боковой.
5.3. Искажения в групповом тракте систем с частотным разделением
Общие сведения.
Тракт групповой представляет собой комплекс технических средств, предназначенный для передачи сигналов электросвязи нормализованного числа каналов тональной частоты (КТЧ) или основных цифровых каналов (ОЦК) в полосе частот или со скоростью передачи, соответствующей данному групповому тракту. В зависимости от нормализованного числа каналов групповой тракт называют первичным, вторичным, третичным, четверичным или N-ым групповым трактом.Канальные сигналы ![]() , объединенные в один групповой сигнал
, объединенные в один групповой сигнал ![]() , передаются по групповому тракту вплоть до разделяющих устройств на прием. Групповой тракт должен обеспечить безискаженную передачу группового сигнала, причем особое внимание должно уделяться условиям ортогональности спектров канальных сигналов. При нарушении условия ортогональности спектров канальных сигналов частотные фильтры на приеме не могут разделить канальные сигналы - возникнут межканальные переходы.Для безыскаженной передачи группового сигнала необходимо обеспечить линейность амплитудной характеристики, а также постоянство амплитудно-частотной и линейность фазовой характеристик. Первая характеристика определяет нелинейные свойства группового тракта, а вторая и третья - линейные искажения. В реальных системах все указанные характеристики групповых трактов в той или иной степени отличаются от идеальных, что приводит к искажениям группового сигнала. Рассмотрим влияние этих искажений.
, передаются по групповому тракту вплоть до разделяющих устройств на прием. Групповой тракт должен обеспечить безискаженную передачу группового сигнала, причем особое внимание должно уделяться условиям ортогональности спектров канальных сигналов. При нарушении условия ортогональности спектров канальных сигналов частотные фильтры на приеме не могут разделить канальные сигналы - возникнут межканальные переходы.Для безыскаженной передачи группового сигнала необходимо обеспечить линейность амплитудной характеристики, а также постоянство амплитудно-частотной и линейность фазовой характеристик. Первая характеристика определяет нелинейные свойства группового тракта, а вторая и третья - линейные искажения. В реальных системах все указанные характеристики групповых трактов в той или иной степени отличаются от идеальных, что приводит к искажениям группового сигнала. Рассмотрим влияние этих искажений.
Линейные искажения группового сигнала.
Рассмотрим групповой тракт как линейный четырехполюсник (рисунок 5.14а) с коэффициентом передачи:
![]()
![]() (5.42)
(5.42)
Рисунок 5.14. Влияние линейных искажений группового тракта в системах с частотным разделением каналов.
На выход группового тракта попадает групповой сигнал, состоящий из суммы N ортогональных канальных сигналов:
![]() (5.43)
(5.43)
Спектр группового сигнала равен сумме N неперекрывающихся (ортогональных) спектров канальных сигналов:
![]() (5.44)
(5.44)
или
![]() (5.45)
(5.45)
С учетом того, что канальный сигнал ![]() передается в полосе частот
передается в полосе частот ![]() , а между
, а между ![]() защитный частотный интервал
защитный частотный интервал ![]() . Полоса частот
. Полоса частот ![]()
Как известно, линейные искажения отсутствуют, если частотная характеристика коэффициента передачи постоянна в полосе частот группового сигнала (рисунок 5.14б):
![]() или
или ![]() (5.46)
(5.46)
а фазовая характеристика линейна:
![]() или
или ![]() (5.47)
(5.47)
или характеристика группового времени замедления постоянна в полосе частот группового сигнала:
 (5.48)
(5.48)
Отключение линейных характеристик группового тракта от идеальных (5.46) и (5.48) ведет к искажению формы группового сигнала.Спектр группового сигнала на выходе группового тракта равен произведению спектра группового сигнала на коэффициент передачи группового тракта:
![]() (5.49)
(5.49)
или
![]() (5.50)
(5.50)
Спектры канальных сигналов на входе группового тракта ![]() представляют собой непересекающиеся по спектру множества (5.1) и удовлетворяют условию ортогональности (5.2). Обычно
представляют собой непересекающиеся по спектру множества (5.1) и удовлетворяют условию ортогональности (5.2). Обычно ![]() в полосе частот группового сигнала
в полосе частот группового сигнала ![]() ; тогда условия (5.1) выполняются и для спектров канальных сигналов на выходе группового тракта
; тогда условия (5.1) выполняются и для спектров канальных сигналов на выходе группового тракта ![]() . Таким образом, спектры канальных сигналов на выходе группового тракта также не перекрываются и удовлетворяют условию ортогональности (5.2). Поэтому на приемном конце канальные сигналы могут быть разделены частотными фильтрами, то есть линейные искажения группового сигнала в системах с ЧРК не приводят к межканальным переходам.Из выражения (5.49) и (5.1) следует, что неравномерность частотной характеристики коэффициента передачи и частотной характеристики группового времени замедления приводит к изменениям амплитудных и фазовых соотношений в спектрах канальных сигналов, то есть возникают линейные искажения: искажается форма каждого канального сигнала в отдельности. Однако эти искажения в отдельных каналах невелики, так как в пределах узкой полосы частот канала коэффициент передачи, и групповое время замедления изменяются незначительно.
. Таким образом, спектры канальных сигналов на выходе группового тракта также не перекрываются и удовлетворяют условию ортогональности (5.2). Поэтому на приемном конце канальные сигналы могут быть разделены частотными фильтрами, то есть линейные искажения группового сигнала в системах с ЧРК не приводят к межканальным переходам.Из выражения (5.49) и (5.1) следует, что неравномерность частотной характеристики коэффициента передачи и частотной характеристики группового времени замедления приводит к изменениям амплитудных и фазовых соотношений в спектрах канальных сигналов, то есть возникают линейные искажения: искажается форма каждого канального сигнала в отдельности. Однако эти искажения в отдельных каналах невелики, так как в пределах узкой полосы частот канала коэффициент передачи, и групповое время замедления изменяются незначительно.
Нелинейные искажения группового сигнала.
Появление нелинейных искажений связано с тем, что амплитудная характеристика группового тракта отклоняется от линейной зависимости. Нелинейную амплитудную характеристику можно представить в виде степенного ряда:
![]() (5.51)
(5.51)
Первое слагаемое в выражении (4.51) представляет собой неискаженный групповой сигнал на выходе, а все остальные – нелинейную помеху:
![]() (5.52)
(5.52)
Используя преобразование Фурье, определяем спектр группового сигнала на примере ![]() , или, с учетом (5.52),
, или, с учетом (5.52),
![]() (5.53)
(5.53)
Первое слагаемое выражения (5.53) представляет собой спектр неискаженного группового сигнала, а остальные слагаемые – спектр нелинейной помехи ![]() .Спектр квадрата группового сигнала (второе слагаемое выражения (5.53)) представляет собой вторые гармоники всех частотных составляющих группового сигнала
.Спектр квадрата группового сигнала (второе слагаемое выражения (5.53)) представляет собой вторые гармоники всех частотных составляющих группового сигнала ![]() и комбинационные частоты второго порядка
и комбинационные частоты второго порядка ![]() ; спектр куба группового сигнала (третье слагаемое выражения (5.54)) представляет третьи гармоники составляющих спектра группового сигнала
; спектр куба группового сигнала (третье слагаемое выражения (5.54)) представляет третьи гармоники составляющих спектра группового сигнала ![]() и комбинационные частоты третьего порядка и так далее. Если подать сигнал только в один из каналов, например в i-й, то на приеме спектр этого канального сигнала расширяется (рис. 5.15) за счет нелинейности. Энергия канального сигнала определенным образом распределяется по всей полосе частот группового тракта. При этом, как видно из рисунка 5.15, спектр нелинейных помех от i–го канала перекрывается со спектрами соседних каналов. Это приводит к появлению нелинейных переходных помех в других каналах. Таким образом, за счет нелинейных искажений возникают межканальные переходы.
и комбинационные частоты третьего порядка и так далее. Если подать сигнал только в один из каналов, например в i-й, то на приеме спектр этого канального сигнала расширяется (рис. 5.15) за счет нелинейности. Энергия канального сигнала определенным образом распределяется по всей полосе частот группового тракта. При этом, как видно из рисунка 5.15, спектр нелинейных помех от i–го канала перекрывается со спектрами соседних каналов. Это приводит к появлению нелинейных переходных помех в других каналах. Таким образом, за счет нелинейных искажений возникают межканальные переходы.
Рисунок 5.15. Возникновение межканальных переходов при нелинейных искажениях группового тракта в системах с ЧРК
Чтобы обеспечить заданную величину переходного затухания между каналами в многоканальных системах с частотным разделением каналов, к групповым трактам предъявляются высокие требования по обеспечению малой нелинейности групповых устройств.
Контрольные вопросы
- При помощи каких видов модуляции осуществляется смещение спектров?
- Какие сигналы используются в качестве переносчиков в системах с ЧРК?
- Из чего состоит спектр сигнала с АМ? Нарисовать спектр первичного сигнала и АМ колебания.
- Для чего применяются огранечители амплитуд на приеме ЧМ и ФМ?
- Почему метод ДБП и fн считается наиболее простым?
- Изобразить векторную диаграмму передачи одной боковой и несущей.
- К чему приводит подавление одной из боковых?
- Работа схемы передачи АМ сигнала с синхронным детектором.
- Какие достоинства метода ОБП сделали его основным методом формирования канальных сигналов?
- Для чего нужен групповой тракт?
Примеры решения задач.
-
- Определить максимальную частоту группового сигнала в трехканальной системе передачи ЧРК и передачи линии одной боковой полосы частот, если групповой сигнал не инвертирован относительно исходного, имеющего спектр частот
 Значение наименьшей несущей частоты 12кГц. Защитный интервал между каналами 0,4кГц.
Значение наименьшей несущей частоты 12кГц. Защитный интервал между каналами 0,4кГц.
- Определить максимальную частоту группового сигнала в трехканальной системе передачи ЧРК и передачи линии одной боковой полосы частот, если групповой сигнал не инвертирован относительно исходного, имеющего спектр частот
Решение:
f1H=12кГц
f2H=16кГц
Ответ: fmax гр=24кГЦ
- Определить полосу частот группового сигнала в 12-ти канальной системе передач, если канальный сигнал передается методом ДБП с fн. первичный сигнал занимает полосу частот канала звукового вещания (ЗВ)
 Защитный канал между интервалами равен 0,2кГц.
Защитный канал между интервалами равен 0,2кГц. - Как можно перенести спектр
 в спектр
в спектр  ? (Нужно использовать демодулятор).
? (Нужно использовать демодулятор). - Определить минимальную частоту группового сигнала 12-ти канальной сисчастот, если групповой сигнал инвентирован относительно исходного, имеющего спектр частот
 . Значение максимальной несущей частоты равно 300кГц. Защитный интервал между каналами 0,6кГц.
. Значение максимальной несущей частоты равно 300кГц. Защитный интервал между каналами 0,6кГц. - Определить полосу частот группового сигнала в 5-ти канальной системе передач, если канальный сигнал передается методом ОБП. Первичный сигнал занимает полосу частот: телефонного канала
 . Защитный частотный интервал между каналами равен 0,8кГц.
. Защитный частотный интервал между каналами равен 0,8кГц.
Список литературы
- Аппаратура ИКМ-30 / А.Н. Голубев, Ю.П. Иванов, Л.С. Левин и др.; под ред. Ю.П. Иванова и Л.С. Левина. – М.: Радио и связь, 1983. – 184 с.
- Баева Н.Н. Многоканальная электросвязь и РРЛ. – М.: Радио и связь, 1998. – 312 с.
- Борисов Ю.П., Пенин П.И. Основы многоканальной передачи информации. М.: Связь, 1967. – 235 с.
- Гитлиц М.В., Лев А.Ю. Теоретические основы многоканальной связи. – М.: Радио и связь, 1985. – 245 с.
- Крук Б.И., Попов Г.Н. … И мир загадочный за занавесом цифр: Цифровая связь. – 2-е изд., испр. – Новосибирск: ЦЭРИС, 2001. – 264 с.
- Многоканальные системы передачи: Учебник для вузов / Н.Н. Баева, В.Н. Гордиенко, С.А. Курицын и др.; под ред. Н.Н. Баевой и В.Н. Гордиенко. – М.: Радио и связь, 1996. – 559 с.
- Попов Г.Н. Телекоммуникационные системы передачи. Часть 1 – Новосибирск: СибГУТИ, 2002. – 203 с.
- Лев Ю.А. Теоретические основы многоканальной связи. – М.: Связь, 1979. – 192 с.