9.1. Потенциальная помехоустойчивость систем передачи непрерывных сообщений
9.2. Аналоговые способы передачи
9.3. Порог помехоустойчивости и способы его снижения
9.5. Импульсные способы передачи
9.1. Потенциальная помехоустойчивость систем передачи непрерывных сообщений
Помехоустойчивость связи при передаче непрерывных сообщений будем характеризовать величиной среднеквадратической ошибки ![]() 2, определяемой выражением
2, определяемой выражением
 (9.1)
(9.1)
Разность [v(t)—u(t)] можно рассматривать как «помеху» на выходе приемника. Если канал имеет идеальную П-образную частотную и линейную фазовую характеристики, то при наличии флуктуационной помехи с равномерным спектром расхождение между v и u на частоте f определяется интенсивностью помехи на выходе приемника на этой частоте G![]() (f), а среднеквадратическое расхождение за счет всех составляющих равно средней мощности помехи на выходе приемника P
(f), а среднеквадратическое расхождение за счет всех составляющих равно средней мощности помехи на выходе приемника P![]() . Относительная ошибка будет равна:
. Относительная ошибка будет равна:
где Fm — полоса пропускания приемника по низкой частоте, P![]() средняя мощность сообщения на выходе приемника.
средняя мощность сообщения на выходе приемника.
Отношение сигнал/помеха в канале, как уже отмечалось, может быть улучшено приемником. Степень улучшения зависит не только от способа приема, но и от способа передачи, в частности, от способа модуляции. Поэтому помехоустойчивость систем связи при передаче непрерывных сообщений удобно оценивать относительным увеличением (выигрышем) отношения сигнала к помехе на выходе приемника по сравнению со значением этого отношения на входе
 (9.2)
(9.2)
где ![]() и
и ![]() —отношения средних мощностей сигнала и помехи соответственно на выходе и входе приемника. При заданном способе передачи
—отношения средних мощностей сигнала и помехи соответственно на выходе и входе приемника. При заданном способе передачи ![]() определяет выигрыш, обеспечиваемый приемником, а при данном способе приема величина
определяет выигрыш, обеспечиваемый приемником, а при данном способе приема величина ![]() характеризует выигрыш, который может быть получен при различных способах передачи.
характеризует выигрыш, который может быть получен при различных способах передачи.
При сравнительной оценке различных систем связи следует сравнивать на входе и выходе отношения мощностей сигнала не к мощностям помехи, а к их средним спектральным плотностям, т. е. определять «обобщенный выигрыш системы»
![]() (9.3)
(9.3)
где ![]() Fm '
Fm '
Определим искажения передаваемых сообщений u(t) при приеме на оптимальный приемник, реализующий условие (5.86). Так как u(t), а значит, и ![]() 2 является функциями параметров
2 является функциями параметров ![]() , то согласно требованиям получения минимума выражения (5.86) частные производные от
, то согласно требованиям получения минимума выражения (5.86) частные производные от ![]() 2 по
2 по ![]() должны равняться нулю, т. е.
должны равняться нулю, т. е.
![]() (9.4)
(9.4)
где обозначено ![]()
Предположим, что сигналы s(u, t) выбраны так, что все ![]() ортогональны между собой:
ортогональны между собой:
![]() и
и
![]() (9.5)
(9.5)
Пусть под действием помех принятый сигнал x(t) получил приращение ![]() , тогда
, тогда ![]() получит некоторое приращение
получит некоторое приращение ![]() , а сигнал s(u, t) получит приращение
, а сигнал s(u, t) получит приращение
![]()
При этом условие (9.4) запишется в виде

или, принимая во внимание (5.86) и (9.5)
![]()
откуда
 (9.6)
(9.6)
При малом уровне помех функция x(t) получает приращение dx(t)=ω(t). При этом параметры ![]() получат приращения, равные
получат приращения, равные
 (9.7)
(9.7)
Поскольку ω(t) есть случайная величина с нормальным распределением, то и приращения d![]() , .получаемые от действия помехи, также будут случайными величинами, имеющими нормальное распределение с нулевым средним и дисперсией
, .получаемые от действия помехи, также будут случайными величинами, имеющими нормальное распределение с нулевым средним и дисперсией
![]()
Величина d![]() характеризует отклонение параметра
характеризует отклонение параметра ![]() от переданного значения
от переданного значения ![]() , т. е. ошибку воспроизведения этого параметра
, т. е. ошибку воспроизведения этого параметра ![]() При малом уровне помех плотность вероятности этой ошибки является нормальной
При малом уровне помех плотность вероятности этой ошибки является нормальной
где ![]() среднеквадратическое значение ошибки.
среднеквадратическое значение ошибки.
В телеметрических системах сообщениями являются передаваемые параметры, характеризующие те или иные физические величины (скорость, температуру и т. п.). Потенциальная помехоустойчивость таких систем определяется величиной среднеквадратической ошибки
![]() (9.8)
(9.8)
или вероятностью того, что ошибка по модулю превысит заданную величину ![]() .
.

Если в общем случае передавалось непрерывное сообщение
![]()
то при отсутствии помех принятый сигнал будет x(t)=s(u,t). По этому сигналу оптимальный приемник воспроизводит переданное сообщение u(t) безискажений: v(t) = u(t).
При наличии помех воспроизводимое оптимальным приемником сообщение
![]() (9.10)
(9.10)
Где ![]() (9.11)
(9.11)
Здесь ![]() e — нормальная случайная величина с единичной дисперсией. Так как при отсутствии помех v(t) = u(t)-, то функцию
e — нормальная случайная величина с единичной дисперсией. Так как при отсутствии помех v(t) = u(t)-, то функцию ![]() *(t) можно рассматривать как составляющую выходного колебания, вызванную помехой на входе, т. е. как колебание помехи на выходе приемника.
*(t) можно рассматривать как составляющую выходного колебания, вызванную помехой на входе, т. е. как колебание помехи на выходе приемника.
Функция ω*(t) есть стационарное флуктуационное колебание с нормальным законом распределения вероятностей. Такая функция полностью характеризуется своим энергетическим спектром. Согласно (9.11) этот спектр определяется следующим выражением:
![]() (9.12)
(9.12)
Интенсивность помехи на выходе приемника, определяемая ф-лой (9.12), является минимально возможной и характеризует потенциальную помехоустойчивость при данной системе модуляции. Из сопоставления ф-л (9.8) и (9.12) следует соотношение
![]() (9.13)
(9.13)
Мощность помехи на выходе приемника с полосой частот от ![]() до
до ![]() будет равна:
будет равна:
 (9.14)
(9.14)
Следует помнить, что колебание ω*(t) и мощность P![]() * определений для u(t), лежащего в пределах ±1. Мощность сигнала (сообщения) на выходе в этих условиях равна:
* определений для u(t), лежащего в пределах ±1. Мощность сигнала (сообщения) на выходе в этих условиях равна: ![]() ,
,
Где  — пикфактор сообщения.
— пикфактор сообщения.
Поэтому отношение сигнала к помехе на выходе приемника
 (9.15)
(9.15)
В случае, когда u(t) представляет синусоиду, ![]() и
и
При телефонной передаче речи считают ![]()
Отношение сигнала к помехе на входе приемника соответственно будет равно: ![]() (9.16)
(9.16)
Обобщенный выигрыш системы γ' согласно (9.3), (9.15) и (9.16) будет определяться следующим выражением:
 (9.17)
(9.17)
Здесь, как и раньше, мы полагаем, что спектр помехи на входе приемника равномерный.
Частотные характеристики приемника считаются идеальными: тракта высокой частоты (до детектора) с полосой пропускания F, а тракта низкой частоты с полосой Fm—f![]() —f
—f![]() .
.
Известные системы модуляции можно разделить на прямые и интегральные. Прямыми называются такие системы, в которых сообщение u(t) входит непосредственно в выражение сигнала. Для этих систем:
 (9.18)
(9.18)
![]()
и, считая частоту несущей f0 >> F![]() ,
,
Тогда согласно (9.t2) для прямых систем будем иметь
К прямым системам относятся различные виды линейной модуляции (AM, БМ) и фазовая модуляция (ФМ).
Интегральными системами называют системы, в которых сообщение u(t) входит в выражение сигнала под знаком интеграла
![]() (9.20)
(9.20)
где ![]() .
.
Для таких систем
 и
и
![]() (9.21)
(9.21)
Это соотношение можно непосредственно получить на основании теоремы о спектре производной.
Из ф-л (9.18) и (9.21) следует, что энергетический спектр помехи на выходе приемника в случае прямых систем модуляции получается равномерным, а в интегральных системах — паpaбoлическим.
Для передачи непрерывных сообщений по каналу связи применяются различные способы модуляции. При синусоидальном переносчике этими способами являются амплитудная модуляция (AM), однополосная модуляция (ОМ), двухполосная амплитудная модуляция с подавленной несущей (БМ), частотная модуляция (ЧМ) и фазовая модуляция (ФМ). Указанные системы модуляции относятся к типу аналоговых систем, в которых один из параметров непрерывного колебания изменяется в соответствии с передаваемым сообщением.
При импульсном способе при передачи непрерывных сообщений в качестве переносчика используется периодическая последовательность импульсов определенной формы. Основными видами модуляции в этом случае является амплитудно-импульсная модуляция (АИМ), широтно-импульсная модуляция (ШИМ), фазоимпульсная модуляция (ФИМ) и частотно-импульсная модуляция (ЧИМ).
При цифровом или кодовом способе передачи наибольшее распространение получили импульсно-кодовая модуляция (ИКМ) и дельта-модуляция (ДМ).
И, наконец, возможно применение различных способов модуляции сложного (шумоподобного) переносчика.
9.2. Аналоговые способы передачи
В качестве примера определим потенциальную помехоустойчивость систем с амплитудной и частной модуляцией.
Амплитудная модуляция. В этом случаи сигнал имеет вид
![]()
Тогда
Согласно (9.19) энергетический спектр помехи на выходе приёмника ![]()
![]() (9.22)
(9.22)
Мощность сигнала на входе преемника равна:

Здесь мы полагаем, что в спектре сообщения u(t) содержатся частоты более низкие, чем ω![]() , и отсутствует постоянная составляющая
, и отсутствует постоянная составляющая ![]() . Обобщенный выигрыш
. Обобщенный выигрыш ![]() при АМ согласно (9.17) равен:
при АМ согласно (9.17) равен:
![]() (9.23)
(9.23)
При синусоидальной модуляции (![]() ) и
) и ![]()
![]() . В общем случае при линейной модуляции сигнал можно записать виде
. В общем случае при линейной модуляции сигнал можно записать виде
![]() (9.24)
(9.24)
Для такого сигнала
 .
.
Спектр помехи на выходе оптимального приемника согласно (9.19)
![]() (9.25)
(9.25)
В частном случае, когда ![]() , получаем результат для амплитудной модуляции (9,22). При
, получаем результат для амплитудной модуляции (9,22). При ![]() будем иметь двухполосную (балансную) модуляцию (БМ)
будем иметь двухполосную (балансную) модуляцию (БМ)
![]()
В этом случае![]() и согласно (9.17)
и согласно (9.17)
![]() (9.26)
(9.26)
Таким образом, выигрыш в системе БМ не зависит ни от коэффициента модуляции, ни от пикфактора сообщения. При синусоидальной модуляции и m=1 выигрыш в системе БМ втрое больше, чем в системе AM. При одинаковой пиковой мощности сигнала ![]() в системе БМ в четыре раза больше, чем в системе AM.
в системе БМ в четыре раза больше, чем в системе AM.
В случае передачи одной боковой полосы (ОМ) энергетический спектр помехи на выходе приемника равен:
![]() (9.27)
(9.27)
Мощность сигнала
![]()
Тогда
Системы ОМ и БМ по помехоустойчивости равноценны. Однако полоса частот сигнала в системе ОМ в два раза меньше, чем в системе БМ.
Частотная модуляция. Для этого вида модуляции сигнал
![]() где
где ![]()
Тогда

и согласно (9.21)
![]() (9.29)
(9.29)
После этого на основании (9.17) получаем выражение для выигрыша системы
![]() (9.30)
(9.30)
Из сравнения ф-л (9.23), (9.26), (9.28) и (9.30) следует, что наибольшей помехоустойчивостью обладает система с частотной модуляцией. В этой системе выигрыш γ увеличивается с увеличением индекса модуляции. Это означает, что увеличение помехоустойчивости достигается в системе ЧМ ценой расширения полосы частот, занимаемой сигналом, т. е. ценой введения в сигнал избыточности по частоте.
9.3. Порог помехоустойчивости и способы его снижения
Все широкополосные системы модуляции обеспечивают высокую помехоустойчивость при условии, что отношение сигнала к помехе qвх на входе приемника больше некоторого предельного (порогового) значения q![]() . При qвх<q
. При qвх<q![]() широкополосные системы теряют свои, преимущества (резко снижается помехоустойчивость) и связь становится практически невозможной. Рассмотренная в предыдущих главах теория помехоустойчивости справедлива для «малых» помех (qвх>q
широкополосные системы теряют свои, преимущества (резко снижается помехоустойчивость) и связь становится практически невозможной. Рассмотренная в предыдущих главах теория помехоустойчивости справедлива для «малых» помех (qвх>q![]() ). Значение порога практически определяет предельную дальность связи при заданной мощности передатчика. Поэтому важно определить это значение и установить закон изменения отношения сигнала к помехе на выходе приемника за порогом (приqвх<q
). Значение порога практически определяет предельную дальность связи при заданной мощности передатчика. Поэтому важно определить это значение и установить закон изменения отношения сигнала к помехе на выходе приемника за порогом (приqвх<q![]() )
)
Рассмотрим один из возможных методов решения этой задачи [2]. При передаче реальных сигналов емкость канала Ср и количество воспроизводимой на выходе приемника информации ![]() за время Т можно определить по формулам:
за время Т можно определить по формулам:
![]() (9.31)
(9.31)
![]() (9.32)
(9.32)
где δ и δт — коэффициенты, зависящие от статистических свойств сигнала и помехи. В реальной системе связи ![]() обычно меньше Ср. С уменьшением отношения сигнала к помехе qвх на входе приемника Ср и
обычно меньше Ср. С уменьшением отношения сигнала к помехе qвх на входе приемника Ср и ![]() уменьшаются. При этом оказывается, что емкость канала Ср уменьшается быстрее, чем количество принятой информации
уменьшаются. При этом оказывается, что емкость канала Ср уменьшается быстрее, чем количество принятой информации ![]() . При некотором значении q достигается равенство Ср=
. При некотором значении q достигается равенство Ср=![]() Поскольку
Поскольку ![]() не может быть больше Ср, то это равенство является предельным, определяющим пороговое значение сигнала к помехе qt. Дальнейшее уменьшение qвх ведет к резкому уменьшению qвых т. е. к увеличению ошибок (искажений) на выходе приемника. В этой области (qвх< qt) в лучшем случае может быть обеспечено лишь равенство Ср=
не может быть больше Ср, то это равенство является предельным, определяющим пороговое значение сигнала к помехе qt. Дальнейшее уменьшение qвх ведет к резкому уменьшению qвых т. е. к увеличению ошибок (искажений) на выходе приемника. В этой области (qвх< qt) в лучшем случае может быть обеспечено лишь равенство Ср=![]() , определяющее предельную помехоустойчивость приемника при большом уровне помех.
, определяющее предельную помехоустойчивость приемника при большом уровне помех.
Поясним теперь явление порога геометрически. Каждому сигналу s(t) соответствует точка в n-мерном пространстве, где n=2TF — база сигнала, а ансамблю возможных сигналов — некоторая область в этом пространстве (пространстве сигналов). При нормальном распределении область возможных сигналов будет представлять собой гиперсферу с радиусом ![]() , а область принятых сигналов x(t)=s(t)+ω(t) —сферу с радиусом
, а область принятых сигналов x(t)=s(t)+ω(t) —сферу с радиусом ![]() . Вокруг каждой точки переданного сигнала образуется область неопределенности, обусловленная помехой. Если помеха представляет собой белый шум, то эта область будет иметь сферическую форму с радиусом
. Вокруг каждой точки переданного сигнала образуется область неопределенности, обусловленная помехой. Если помеха представляет собой белый шум, то эта область будет иметь сферическую форму с радиусом ![]() . Максимальное число различимых точек сигнала М, очевидно, будет равно отношению объема сферы принятых сигналов Vx к объему шумовой сферы Vш. Объем n-мерной сферы, как известно, равен:
. Максимальное число различимых точек сигнала М, очевидно, будет равно отношению объема сферы принятых сигналов Vx к объему шумовой сферы Vш. Объем n-мерной сферы, как известно, равен:
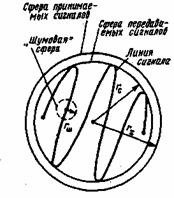
Рис. 9.1. К геометрической интерпретации порога
Тогда
![]()
Емкость канала определяется как logM, а пропускная способность
Так мы приходим к ранее полученной формуле Шеннона (6.87) для пропускной способности канала.
При передаче непрерывного сообщения u(t) передаваемый сигнал s(t, и) является функцией и. Следовательно, совокупности сообщений {u(i)}, лежащих в интервале (—1,+ 1), соответствует некоторая линия в пространстве сигнала. Форма и длина этой линии зависят от вида модуляции. Если максимальная мощность передаваемых сигналов ограничена, то линия сигналов будет расположена на поверхности или внутри псевдосферы радиуса rс =![]() . В двухмерном пространстве это будет линия, лежащая в круге радиуса rс (рис.9.1). Величина
. В двухмерном пространстве это будет линия, лежащая в круге радиуса rс (рис.9.1). Величина  и характеризует длину отрезка, на который сместится изображающая точка по линии сигнала, когда передаваемое сообщение получит приращение
и характеризует длину отрезка, на который сместится изображающая точка по линии сигнала, когда передаваемое сообщение получит приращение ![]() . Очевидно, чем больше это смещение, тем меньше вероятность, что под действием помехи такое смещение произойдет.
. Очевидно, чем больше это смещение, тем меньше вероятность, что под действием помехи такое смещение произойдет.
Действительно, согласно (9.19) чем больше,тем меньше будет ошибка из-за наложения помех. Таким образом, для увеличения помехоустойчивости следует выбирать такие системы передачи, для которых линия сигналов при изменении сообщения и от —1 до +1 будет наиболее длинной.
Форма линии сигналов в общем cлучае отличается от формы .линии сообщений. Для системы ОБП линии сигналов и сообщений идентичны, а для систем с линейной модуляцией (AM, БМ ) — подобны. В случае широкополосных систем (например, ЧМ) линия сигналов имеет сложную извилистую форму (рис. 9.1). Длина линии увеличивается с увеличением полосы частот (индекса модуляции) сигнала. При ограниченной мощности сигнала (rc = const) удлинение линии ведет к сближению различных витков линии.
Число различимых точек сигнала, очевидно, равно числу непрерывающихся шумовых сфер на линии сигнала. Если уровень помех мал (соответственно мал радиус шумовых сфер), то число различимых точек будет сравнительно большим. Однако шумовые сферы вдоль линии сигнала будут занимать лишь небольшую часть объема сферы сигнала. Емкость канала в этом случае используется не полностью (Jp<Cp). За счет избыточной емкости ![]() С = СР—Jр обеспечивается значительный выигрыш системы
С = СР—Jр обеспечивается значительный выигрыш системы ![]() (9.30).
(9.30).
С увеличением уровня помех радиус шумовых сфер увеличивается, улучшается использование емкости канала, но одновременно уменьшается число различимых точек на линии сигнала (уменьшается помехоустойчивость). При некотором уровне помех шумовые сферы соседних витков сигнала будут касаться друг друга. В этом предельном случае объем сферы сигнала будет плотно заполнен шумовыми сферами. Это означает, что вся емкость канала используется для передачи информации (JР=СР). При дальнейшем увеличении уровня помех шумовые сферы будут перекрываться, а это может привести к тому, что по принятому сигналу будет воспроизведено сообщение, соответствующее точке сигнала, лежащей на соседнем витке. Появляются так называемые аномальные ошибки, резко снижающие помехоустойчивость системы связи. Таким образом, равенство JР=СР является предельным, определяющим порог помехоустойчивости.
Приравнивая Jр к Ср согласно (9.31) и (9.32) получим выражение для отношения сигнала к помехе на выходе приемника за «порогом» (qвх< qt)
![]() (9.33)
(9.33)
Вблизи порога, когда 1<qвх< qt
![]()
Выражение, определяющее отношение сигнала к помехе на выходе приемника до «порога» (qвх> qt), известно из теория "малых" помех. Согласно (9.2) это выражение в общем виде можно записать
![]() (9.34)
(9.34)
где ![]() зависит от вида модуляции. Пороговые значения qt и qt = qtвых можно определить путем решения следующей система уравнений, составленных «а основе (9.38) и (9.34):
зависит от вида модуляции. Пороговые значения qt и qt = qtвых можно определить путем решения следующей система уравнений, составленных «а основе (9.38) и (9.34):
 (9.35)
(9.35)
Практически эта система уравнений решается графически.
Рассмотрим отдельные виды модуляции на основании полу-чинных общих соотношений. Для однополосной системы (ОМ) v=l,![]() . Согласно (9.28) и (9.33) при qвх> qвых ,qвх = qвых при qвх < qt. Следовательно, порог в системе ОМ отсутствует.
. Согласно (9.28) и (9.33) при qвх> qвых ,qвх = qвых при qвх < qt. Следовательно, порог в системе ОМ отсутствует.
Для амплитудной модуляции v = 2. Полагая ![]() , из (9.23) имеем
, из (9.23) имеем
![]() (9.36)
(9.36)
а согласно (9.23)
![]() (9.37)
(9.37)
Решение системы ур-ний (9.35) с учетом экспериментальных данных для ![]() и
и ![]() дает значение
дает значение ![]() порядка единицы.
порядка единицы.
Таким образом, при условий, что полоса пропускания высокочастотной части приемника равна ширине спектра сигнал. При более широкой полосе пропускания ![]() возрастает и наблюдается быстрое уменьшение
возрастает и наблюдается быстрое уменьшение ![]() . ниже порога.
. ниже порога.
Для ЧМ v![]() 2m:
2m:
![]() (9.38)
(9.38)
![]() (9.39)
(9.39)
Решение системы ур-ний (9.35) для ЧМ сводится к решению алгебраического уравнения степени 2т. При ![]() и
и ![]() справедлива приближенная формула
справедлива приближенная формула
![]() (9.40)
(9.40)
В общем случае для любой системы модуляции можно считать
![]() (9.41)
(9.41)
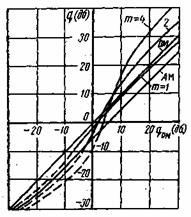
Рис. 9.2. Зависимость отношения сигнала к помехе на выходе приемника ЧМ (т=1,2,4), ОМ и AM от отношения сигнал/помеха на входе приемка ОМ
На рис. 9.2 приведена зависимость отношения сигнала к помехе на выходе приемника ЧМ ![]() при различных индексах модуляции. По оси абсцисс отложено отношение сигнала к помехе в децибелах на входе приемника ОМ, а по оси ординат — отношение сигнала к помехе в децибелах на выходе приемника ЧМ. Так как для ЧМ F
при различных индексах модуляции. По оси абсцисс отложено отношение сигнала к помехе в децибелах на входе приемника ОМ, а по оси ординат — отношение сигнала к помехе в децибелах на выходе приемника ЧМ. Так как для ЧМ F![]() 2mFm, а для ОМ F=Fm, то значение q на входе приемника определится как
2mFm, а для ОМ F=Fm, то значение q на входе приемника определится как
![]()
Кривые рассчитаны по ф-лам (9.38) и (9.39) с учетом экспериментальных данных для ![]() и
и ![]() . Для сравнения на этом же рисунке нанесены соответствующие кривые для AM и ОМ. Поскольку определение
. Для сравнения на этом же рисунке нанесены соответствующие кривые для AM и ОМ. Поскольку определение ![]() и
и ![]() при
при ![]() затруднительно, то кривые в этой области (пунктир) проведены ориентировочно.
затруднительно, то кривые в этой области (пунктир) проведены ориентировочно.
Из рисунка видно, что с увеличением индекса модуляции пороговое значение ![]() увеличивается и порог становится более резко выраженным. За порогом помехоустойчивость ЧМ сильно уменьшается и при сравнительно большом уровне помех становится хуже, чем помехоустойчивость систем ОМ и AM. При
увеличивается и порог становится более резко выраженным. За порогом помехоустойчивость ЧМ сильно уменьшается и при сравнительно большом уровне помех становится хуже, чем помехоустойчивость систем ОМ и AM. При ![]() порог выражен слабо и кривые для ЧМ приближаются к кривым для AM.
порог выражен слабо и кривые для ЧМ приближаются к кривым для AM.
Графическое решение системы ур-ний (9.35) для частотной модуляции при различных значениях v=2т показывает, что пороговое значение отношения сигнала к помехе на входе приемника qt при изменении индекса модуляции изменяется в пределах от 1 до 2. Пороговая мощность при этом изменяется в весьма широких пределах, поскольку
![]() (9.42)
(9.42)
где ![]() — мощность шума на входе приемника, пропорциональная ширине полосы пропускания приемника F и, следовательно, индексу модуляции m.
— мощность шума на входе приемника, пропорциональная ширине полосы пропускания приемника F и, следовательно, индексу модуляции m.
При малом уровне помех (![]() ) минимально необходимая мощность сигнала на входе приемника ЧМ при заданном
) минимально необходимая мощность сигнала на входе приемника ЧМ при заданном ![]() равна:
равна:
![]() (9.43)
(9.43)
С увеличением т эта мощность уменьшается. Здесь выигрыш γ, определяемый ф-лой (9.30), полностью реализуется.
При большом уровне помех (![]() ) величина выигрыша резко уменьшается и минимальная мощность сигнала практически определяется величиной порога
) величина выигрыша резко уменьшается и минимальная мощность сигнала практически определяется величиной порога ![]() . Увеличение индекса модуляция при этом может оказаться нецелесообразным. Из условия
. Увеличение индекса модуляция при этом может оказаться нецелесообразным. Из условия ![]() можно определить максимально допустимый индекс модуляции, при котором еще реализуется выигрыш γ и мощность сигнала определяется ф-лой (9.43). На основании (9.42) и (9.43) имеем
можно определить максимально допустимый индекс модуляции, при котором еще реализуется выигрыш γ и мощность сигнала определяется ф-лой (9.43). На основании (9.42) и (9.43) имеем
![]()
откуда
![]() (9.44)
(9.44)
Таким образом, оптимальный индекс модуляции тем выше, чем более высокие требования предъявляются к качеству передачи сообщений (величине ![]() ). При индексе модуляции, определяемом выражением (9.44), заданное значение
). При индексе модуляции, определяемом выражением (9.44), заданное значение ![]() достигается пря минимальной затрате мощности сигнала на входе. Однако в этих условиях малейшее уменьшение мощности входного сигнала приводит к переходу за порог, т. е. к резкому уменьшению
достигается пря минимальной затрате мощности сигнала на входе. Однако в этих условиях малейшее уменьшение мощности входного сигнала приводит к переходу за порог, т. е. к резкому уменьшению ![]() .
.
Полученные значения порога для различных видов модуляции (![]() ) являются предельными и в реальных приемниках могу» быть достигнуты, но не могут быть превзойдены. По экспериментальным данным порог в системе ЧМ при обычном способе приема наступает примерно при равенстве пиковых значений сигнала и помехи, что соответствует
) являются предельными и в реальных приемниках могу» быть достигнуты, но не могут быть превзойдены. По экспериментальным данным порог в системе ЧМ при обычном способе приема наступает примерно при равенстве пиковых значений сигнала и помехи, что соответствует ![]() . Это означает, что при большом уровне помех реальная помехоустойчивость приемника ЧМ значительно меньше потенциальной. Следовательно, имеется возможность путем усовершенствования схемы приемника снизить порог помехоустойчивости и тем самым увеличить дальность связи при той же мощности передатчика. Эта проблема стала особенно актуальной в связи с разработкой сверхдальних космических линий связи.
. Это означает, что при большом уровне помех реальная помехоустойчивость приемника ЧМ значительно меньше потенциальной. Следовательно, имеется возможность путем усовершенствования схемы приемника снизить порог помехоустойчивости и тем самым увеличить дальность связи при той же мощности передатчика. Эта проблема стала особенно актуальной в связи с разработкой сверхдальних космических линий связи.
Большинство методов снижения порога при ЧМ основано на принципе «сжатия» спектра сигнала в приемнике. Частотно-модулированный сигнал можно представить в виде синусоиды, положение которой на шкале частот меняется в соответствии с законом модуляции. Ширина полосы пропускания обычного ЧМ приемника выбирается такой, чтобы вмещать полезный сигнал в любой момент времени за период модуляции. Эта полоса намного превышает полосу частот передаваемого сообщения. Однако ЧМ сигнал не занимает эту полосу все время, можно лишь утверждать, что в любой момент времени он находится в некотором отрезке полосы. Наличие априорной информации о скорости изменения частоты сигнала позволяет осуществить слежение за этой частотой узкополосным приемником, что достигается введением обратной связи по частоте или применением следящего фильтра промежуточной частоты.
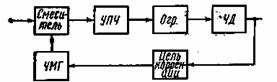
Рис. 9.3. Структурная схема приемника ЧМ сигналов с обратной связью по частоте
Структурная схема приемника с отрицательной обратной связью по частоте приведена на рис. 9.3. Обратная связь выбирается таким образом, чтобы синхронно с изменением частоты принимаемого сигнала в том же направлении изменялась частота гетеродина Г. Если обозначить коэффициент передачи прямого тракта через К, а коэффициент передачи цели обратной связи через β, то параметры ЧМ сигнала на выходе УПЧ (![]() и т') можно выразить через параметры входного сигнала (
и т') можно выразить через параметры входного сигнала (![]() и т) следующим образом.
и т) следующим образом.
![]() (9.45)
(9.45)
Как видим, девиация частоты ![]() в УПЧ оказывается меньше, чем на входе приемника. Поэтому полосу пропускания УПЧ можно сузить и тем самым уменьшить мощность шумов иа входе детектора, что согласно (9.42) влечет за собой снижение пороговой мощности сигнала.
в УПЧ оказывается меньше, чем на входе приемника. Поэтому полосу пропускания УПЧ можно сузить и тем самым уменьшить мощность шумов иа входе детектора, что согласно (9.42) влечет за собой снижение пороговой мощности сигнала.
Если полоса частот на входе смесителя равна F![]() 2Fm(1+m), то на выходе его при наличии обратной связи по частоте полоса
2Fm(1+m), то на выходе его при наличии обратной связи по частоте полоса
![]() (9.46)
(9.46)
При достаточно глубокой обратной связи можно получить ![]() . Спектр сигнала, таким образом снижается в m+1 раз. Следовательно, в пределе полоса пропускания тракта промежуточной частоты приемника может быть сужена в m+1 раз и во столько же раз снижен порог помехоустойчивости. Практически это предельное снижение порога не достигается. Эксперименты показывают, что таким образом можно снизить порог на 5—9 дб. Аналогичные результаты получаются в схеме со следящим фильтром (рис. 9.4).
. Спектр сигнала, таким образом снижается в m+1 раз. Следовательно, в пределе полоса пропускания тракта промежуточной частоты приемника может быть сужена в m+1 раз и во столько же раз снижен порог помехоустойчивости. Практически это предельное снижение порога не достигается. Эксперименты показывают, что таким образом можно снизить порог на 5—9 дб. Аналогичные результаты получаются в схеме со следящим фильтром (рис. 9.4).
Приемник со следящим фильтром отличается от приемника с обратной связью тем, что элементом, перестраиваемым под действием низкочастотного выходного сигнал, является узкополосный фильтр в тракте промежуточной частоты.
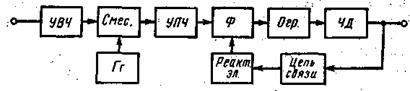
Рис. 9.4. Структурная схема приемника ЧМ со следящим фильтром.
При этом входной тракт, УПЧ, ограничитель и ЧД выполняются широкополосными, как и в обычном ЧМ приемнике. Следящий фильтр представляет собой узкополосный LC-контур, перестраиваемый по частоте в пределах полосы, равной удвоенной девиации частоты сигнала. Основные соотношения, описывающие процесс снижения порога, здесь получаются примерно такими же, как и для приемника с обратной связью. Минимальная полоса частот узкополосного фильтра не должна быть меньше удвоенной высшей модулирующей частоты Fm.
В описанных схемах снижения порога сжатие спектра сигнала и соответствующее сужение полосы пропускания тракта УПЧ приемника в равной степени уменьшают как сигнал, так и помеху, поэтому отношение сигнала к помехе на выходе приемника при работе до порога не изменяется.
Схемы снижения порога, приведенные в данном параграфе, являются разновидностями схем квазиоптимального приемника (рис. 5.12 и 5.13). Во всех этих схемах слежение осуществляется за мгновенной частотой сигнала.
9.4. Системы с поднесущими
В технике связи нередко применяется двойная модуляция. При этом передаваемым сообщением модулируется вспомогательное колебание (поднесущая) с частотой fП, а затем полученным модулированным колебанием модулируется другое колебание (несущая) с частотой ![]() . В многоканальных системах двойная модуляция позволяет осуществить частотное уплотнение каналов.
. В многоканальных системах двойная модуляция позволяет осуществить частотное уплотнение каналов.
В одноканальных системах с поднесущей двойная модуляция позволяет снизить требования к стабильности несущей частоты, заменив его более легко выполнимым требованием к стабильности поднесущей частоты. Кроме того, такие системы, как ЧМ-АМ или ФМ-АМ, применяются в тех случаях, когда нельзя использовать непосредственно ЧМ или ФМ из-за селективных замираний. Например, в телеметрических системах необходимо передавать не только форму, но и масштаб сообщения u(t). Для этих целей нельзя в каналах с замиранием использовать AM или ОМ, так как замирания будут вызывать изменеия амплитуды принимаемого сообщения. В таких случаях часто используют ЧМ-АМ или ФМ-АМ. По этой же причине система ЧМ-АМ применяется в фототелеграфных системах на коротких волнах.
Разнообразие систем модуляции позволяет осуществить большое количество систем с поднесущими. Практическое применение находят системы ОМ-AM, ФМ-АМ, ЧМ-АМ, ОМ-ОМ, ЧМ-ОМ, ОМ-БМ, ОМ-ЧМ, ЧМ-ЧМ .и др.
При малом уровне помех выигрыш систем с поднесущими определяется таким же методом, что и при обычной однократной модуляции на основании ф-лы (9.17). Рассмотрим для примера систему ФМ-АМ. В этой системе сигнал можно выразить так:
![]() (9.47)
(9.47)
Так как система ФМ-АМ относится к прямым системам модуляции, то выигрыш можно определить по ф-лам (9.17) с учетом выражения (9.19).
Для сигнала (9.47):
![]()
![]()
откуда
![]() (9.48)
(9.48)
Из полученного выражения следует, что обобщенный выигрыш равен произведению выигрышей при ФМ и AM. Легко убедиться, что для любой системы с поднесущей, в которой модуляция несущей является прямой, обобщенный выигрыш ![]() равен произведению выигрышей первой
равен произведению выигрышей первой ![]() и второй
и второй ![]() ступеней модуляции, т. е.
ступеней модуляции, т. е.
![]() (9.49)
(9.49)
Порог помехоустойчивости в системах с поднесущими в общем случае будет наблюдаться по обеим ступеням модуляции. Здесь важно определить, по какой ступени модуляции порог наступает раньше и где он выражен сильнее. В системе ОМ-ОМ порог отсутствует. Бели в одной ступени модуляции используется ОМ, БМ или AM, а в другой ступени — ФМ или ЧМ, то порог помехоустойчивости определяется той ступенью, в которой применена фазовая или частотная модуляция. Так, в системе ЧМ-АМ порог определяется модуляцией поднесущей, а в системе ОМ-ЧМ — модуляцией несущей [2].
9.5. Импульсные способы передачи
Согласно теореме В. А. Котельникова, непрерывное колебание u(t) может быть передано по линии связи с необходимой точностью путем передачи отдельных мгновенных значений этого колебания
![]() (9.50)
(9.50)
взятых для моментов времени, отстоящих друг от друга на величину ![]() , где F
, где F![]() — наивысшая частота, содержащаяся в колебании u(t).
— наивысшая частота, содержащаяся в колебании u(t).
В системах связи, основанных на этом принципе (импульсные системы), для передачи колебания u(t) используется периодическая последовательность импульсов
 (9.51)
(9.51)
При этом один из параметров этой последовательности изменяется в соответствии с изменением мгновенных значений (9.50) передаваемого колебания u(t).
Модулированную последовательность импульсов на выходе первой ступени модуляции можно записать в виде
 (9.52)
(9.52)
В выражениях (9.51) и (9.52) пределы суммы взяты на основании предположения о том, что сообщение передается в интервале времени от -![]() до
до ![]() , где T — достаточно большая величина по сравнению с периодом повторения импульсов
, где T — достаточно большая величина по сравнению с периодом повторения импульсов ![]() ,
,![]() где р — тактовая частота. Полагаем, что d — целое число; U(t) — уравнение огибающей импульса, причем U(t)=0 при t<0 и t>
где р — тактовая частота. Полагаем, что d — целое число; U(t) — уравнение огибающей импульса, причем U(t)=0 при t<0 и t>![]() , где
, где ![]() — длительность импульса.
— длительность импульса.
Для передачи колебания f(u, t) по радио необходимо применить еще одну ступень модуляции. При этом может быть использована любая из систем модуляции, рассмотренных в § 9.2.
Сигнал, излучаемый передатчиком, представляет собой колебания, зависящие от времени и передаваемого сообщения:
![]() (9.53)
(9.53)
Потенциальную помехоустойчивость импульсных систем модуляции можно определить, исходя из общей ф-лы (9.12) или соответственно из ф-лы (9.19) для прямых систем модуляции несущей и ф-лы (9.21) —для интегральных систем.
Обозначение систем в дальнейшем изложении принято в виде короткой записи ХУZ—АВ, где первые три буквы обозначают вид импульсной модуляции в каналах, а символ АВ — способ модуляции несущей.
Подробные исследования помехоустойчивости импульсных систем модуляции читатель может найти в работе [2]. Здесь мы ограничимся лишь анализом полученных там результатов. Потенциальная помехоустойчивость систем АИМ-АМ, АИМ-БМ и АИМ-ОМ оказывается равной потенциальной помехоустойчивости соответствующих аналоговых систем AM, БМ, ОМ. Для этих систем помехоустойчивость не зависит от формы и длительности импульсов и ширины спектра сигнала.
В системах АИМ-ФМ и АИМ-ЧМ помехоустойчивость может быть повышена за счет расширения полосы частот, занимаемой сигналом.
Обобщенный выигрыш в системе ФИМ-АМ определяется следующим выражением:
![]() (9.54)
(9.54)
где ![]() — коэффициент, зависящий от формы импульса,
— коэффициент, зависящий от формы импульса, ![]() — максимальная девиация импульса. Как видим, помехоустойчивость системы ФИМ зависит от формы импульса. При оптимальном выборе параметров системы ФИМ-АМ:
— максимальная девиация импульса. Как видим, помехоустойчивость системы ФИМ зависит от формы импульса. При оптимальном выборе параметров системы ФИМ-АМ: ![]() ,p = 2Fm,
,p = 2Fm, ![]() ,
, ![]()
![]() (9.55)
(9.55)
При ![]() — , что соответствует треугольной форме импульсов,
— , что соответствует треугольной форме импульсов,
![]() (9.56)
(9.56)
Это совпадает с ф-лой (9.30) для системы с частотной модуляцией. Следовательно, потенциальная помехоустойчивость системы ФИМ-АМ при оптимальном выборе параметров и системы ЧМ одинакова.
Система с частотно-импульсной модуляцией (ЧИМ) имеет ту же потенциальную помехоустойчивость, что и система ФИМ-АМ.
Применение ЧМ и ФМ с ФИМ позволяет обеспечить более высокую помехоустойчивость по сравнению с системой ФИМ-АМ лишь при достаточно больших индексах модуляции. При использовании же коротких импульсов применение высоких индексов модуляции может оказаться практически неосуществимым или нецелесообразным.
Важным достоинством системы ФИМ-АМ является то, что ее передающее устройство в этой системе работает в режиме передачи кратковременных импульсов. В системах ФИМ-ЧМ и ФИМ-ФМ это преимущество теряется.
Формулы, определяющие потенциальную помехоустойчивость систем с ФИМ, справедливы и для соответствующих систем с ШИМ при u(t)=0. Однако при этом следует помнить, что в системе с ШИМ средняя длительность импульса больше, чем в системе с ФИМ. Вследствие этого при одинаковой амплитуде импульса в системе ШИМ-АМ затрачивается большая средняя мощность передатчика, чем в системе ФИМ-АМ.
Существенным преимуществом импульсных методов модуляции является возможность эффективного амплитудного ограничения по максимуму и минимуму. Это позволяет значительно повысить помехоустойчивость приема при малом уровне помех. Сказанное не относится к системе АИМ, в которой ограничение импульсов по амплитуде недопустимо.
В настоящее время широко применяется пороговый прием, при котором модулируемые параметры импульса определяются в момент перехода его через некоторый уровень (порог). При большом уровне помех отдельные выбросы помехи могут превысить уровень порога я вызвать ложные срабатывания выходных устройств в промежутках между импульсами. Кроме того, выбросы помехи могут подавлять отдельные импульсы сигнала. Если пиковое значение помехи равно или больше порога срабатывания приемника, то вероятность ложных срабатываний резко увеличивается и прием становится практически невозможным.
Таким образом, в импульсных системах с амплитудной модуляцией несущей, а также в системах передачи ОМ и БМ порог помехоустойчивости определяется порогом срабатывания приемника. Обычно пороговый уровень в приемнике выбирается равным половине амплитуды сигнала. В этом случае порог помехоустойчивости при пикфакторе помехи ![]()
![]() (9.57)
(9.57)
где п — число каналов.
Пороговая мощность при этом равна:
![]() (9.58)
(9.58)
При оптимальном выборе параметров системы Fτ0 = 1 и ![]()
![]() (9.59)
(9.59)
Полученные выражения показывают, что пороговая мощность сигнала в импульсных системах с амплитудной модуляцией несущей <не зависит от полосы пропускания приемника. Это обусловливает одно из важнейших преимуществ импульсных систем по сравнению, например, с частотной модуляцией. Действительно, выбирая достаточно малую длительность импульса, можно увеличить выигрыш системы -у. не увеличивая при этом пороговую мощность сигнала. В системе же с частотной модуляцией увеличение выигрыша γ за счет расширения полосы частот канала ведет к увеличению пороговой мощности сигнала.
В импульсных системах с частотной модуляцией несущей порог помехоустойчивости определяется системой модуляции несущей.
9.6. Цифровые способы передачи непрерывных сообщений
Рассмотрим системы, в которых передача непрерывных сообщений сводится к передаче чисел (кодовых групп), отображающих дискретные (квантованные) уровни сообщения в моменты отсчета на шкале времени. К таким системам, в частности, относятся импульоно-кодовая модуляция и дельта-модуляция.
В системе ИКМ сигнал представляет собой последовательность кодовых комбинаций, отображающих квантованные по уровню значения (9.50) передаваемого сообщения u(t) (рис. 9.5).
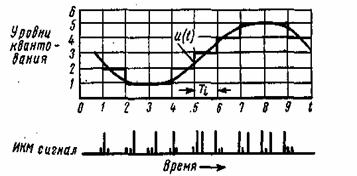
Рис. 9.5. Преобразование непрерывного сообщения в трехзначный ИКМ сигнал
Если взять трехзначный код, то можно составить комбинации, приведенные в табл. 9.1.
Таблица 9.1

Кодовые комбинации представляют собой числа, записанные в двоичной системе. В этой системе разряды соответствуют числам 1, 2, 4, 8 и т. д.
Период следования комбинаций выбирается равным периоду отсчетов мгновенных значений ![]() колебания u(t). Каждая кодовая комбинация содержит k элементарных посылок одинаковой длительности. В общем случае эти посылки могут принимать т значений. Это позволяет кодировать и передавать L=mk уровней колебания u(t). Скорость передачи при этом будет равна:
колебания u(t). Каждая кодовая комбинация содержит k элементарных посылок одинаковой длительности. В общем случае эти посылки могут принимать т значений. Это позволяет кодировать и передавать L=mk уровней колебания u(t). Скорость передачи при этом будет равна:
![]() (9.60)
(9.60)
где ![]() частота отсчетов.
частота отсчетов.
При p = 2Fm (9.61)
Для двоичного кодирования, которое мы и будем рассматривать в дальнейшем, m=2 и
R=2kFm (9.62)
Для передачи посылок кодовых комбинаций может быть использован любой из способов передачи дискретных сигналов, рассмотренных в предыдущей главе (AM, ЧМ, ФМ).
В приемнике кодовые группы декодируются и образуют последовательность импульсов, пропорциональных переданным отсчетам. В простейшем случае это достигается тем, что кодовые комбинации передаются в обратном порядке, т.е. сначала низшие, а затем высшие разряды. Импульсы подаются на RС-цепочку с такой постоянной времени, чтобы разряд убывал в m раз за время между импульсами.
После последнего импульса накопленный заряд (напряжение) снимается. Так получается импульс, соответствующий одному отсчету. Аналогично будут получены другие импульсы. Затем эти импульсы пропускаются через фильтр нижних частот с граничной частотой Fm для восстановления переданного сообщения u(t).
Особенностью ИКМ, так же как и других систем с квантованием, является то, что даже при полном отсутствии помех в канале принятое сообщение v(t) отличается от передаваемого u(t), поскольку квантованное сообщение лишь приблизительно совпадает с исходным. Поэтому при отсутствии помех
v(t)=u(t)+ε(t)
где ε (t) представляет собой так называемый «шум квантования». Легко видеть, что значение случайной функции ε находится в пределах
![]()
поскольку сообщение при квантовании аппроксимируется с точностью до половины ступени квантования, равной 2/L. Мощность шума квантования равна дисперсии ε
При большом числе уровней квантования можно считать все значения е в пределах от![]() равновероятными. Тогда плотность вероятности p(ε) равна
равновероятными. Тогда плотность вероятности p(ε) равна ![]() , а дисперсия
, а дисперсия 
Учитывая, что мощность нормированного сигнала на выходе приемника равна ![]() , найдем отношение мощности сигнала к мощности шума квантования
, найдем отношение мощности сигнала к мощности шума квантования
![]() (9.63)
(9.63)
Отсюда видно, что, выбрав достаточно большое число уровней квантования L (или большое число импульсов в комбинации k), можно получить сколь угодно высокое отношение сигнала к шуму квантования. Но большое число импульсов k можно обеспечить только при достаточно широком спектре сигнала. Действительно, частота следования кодовых комбинаций должна быть не менее чем 2Fm для одного канала или 2nFm в n-канальной системе. Следовательно, максимальная частота следования импульсов не может быть меньше 2knFm или длительность импульса ![]() не может быть больше 1/2knFm.
не может быть больше 1/2knFm.
Положим, ![]() , где
, где ![]() — коэффициент, определяющий скважность импульсов. Для передачи радиоимпульса длительностью
— коэффициент, определяющий скважность импульсов. Для передачи радиоимпульса длительностью ![]() , как известно, необходима полоса частот
, как известно, необходима полоса частот
![]()
где ![]() - — коэффициент, зависящий от допустимого искажения формы импульса. Тогда
- — коэффициент, зависящий от допустимого искажения формы импульса. Тогда
![]() (9.64)
(9.64)
Определив отсюда k и подставив его значение в (9.63), найдем
![]() (9.65)
(9.65)
Сравнивая эту формулу с (9.69), видим, что в системе ИКМ величина ![]() , так же как и
, так же как и ![]() в идеальной системе, экспоненциально растет с увеличением v. Система ИКМ приближалась бы к идеальной, если бы, помимо шумов квантования, никаких других помех на ее выходе не было. В действительности в системе ИКМ возникают и другие шумы, вызванные тем, что помехи в канале могут создавать ложные импульсы или подавлять импульсы сигнала.
в идеальной системе, экспоненциально растет с увеличением v. Система ИКМ приближалась бы к идеальной, если бы, помимо шумов квантования, никаких других помех на ее выходе не было. В действительности в системе ИКМ возникают и другие шумы, вызванные тем, что помехи в канале могут создавать ложные импульсы или подавлять импульсы сигнала.
В отличие от систем АИМ, ФИМ и ШИМ, где при приеме необходимо определять амплитуду, положение или длительность импульса, в системе ИКМ достаточно установить факт наличия или отсутствия импульса. Поэтому до тех пор, пока помехи на входе приемника лишь искажают амплитуду или смещают положение фронта импульса, они на выходной сигнал ИКМ не действуют. Только в тех случаях, когда интенсивность помехи на входе столь велика, что она вызывает ошибки в определении наличия или отсутствия импульса, к шумам квантования прибавляются дополнительные шумы.
Можно показать, что отношение сигнала к помехе в этом случае определяется следующим выражением:
![]() (9.66)
(9.66)
Приведенная формула справедлива для любого вида модуляции несущей. От вида модуляции зависит величина α2, которая согласно (5.52) равна![]() .
.
Значения а для различных систем манипуляции приведены в § 5.4.
При больших значениях а можно применить асимптотическое разложение функции Ф(α) и преобразовать ф-лу (9.66) к более простому виду. Действительно, так как
![]()
то при α>> 1
![]()
откуда при L>>l, p=2Fm и kП=![]()
![]() (9.67)
(9.67)
Порог помехоустойчивости в системе ИКМ-АМ, так же как и в импульсных системах модуляции, определяется порогом срабатывания приемника.
Наряду с системой ИКМ на практике находит применение другая цифровая система, которая называется системой дельта-модуляции (ДМ). В этой системе непрерывное сообщение также преобразуется в двоичный сигнал. При этом используется чрезвычайно простой способ декодирования. В системе ДМ передаваемый сигнал содержит импульсы положительной или отрицательной полярности (+1 или -1), а декодирующее устройство представляет собой простой интегрирующий контур, который суммирует все импульсы последовательности. На рис. 9.6 иллюстрируется преобразование непрерывного сообщения u(t) в ДМ сигнал. Полярность передаваемого импульса соответствует знаку производной сообщения u(t). Помехоустойчивость системы с ДМ определяется аналогичным с ИКМ методом.
Замечательным свойством систем с квантованием сигнала, в том числе систем ИКМ и ДМ, является возможность регенерации импульсов после того, как эти импульсы претерпели искажение при передаче по линии связи. Вследствие этого уменьшается влияние помех и значительно снижается накопление шумов при ретрансляции.
9.7. Идеальная система связи
Теория помехоустойчивости позволяет определить оптимальный способ приема при заданном способе передачи (для заданных видов модуляции и кодирования). Потенциальная помехоустойчивость, как мы убедились, при различных способах передачи различна. При ЧМ, например, помехоустойчивость больше, чем при AM, и увеличивается с увеличением индекса модуляции.
А при каком способе передачи помехоустойчивость будет наибольшей? Возможен ли такой оптимальный способ передачи? Если возможен, какова его помехоустойчивость при оптимальном способе приема? В терминах теории информации оптимальным способом приема называется такой способ, который обеспечивает минимум потерь информации на приеме. Согласно ф-ле (6.80) для пропускной способности канала потеря информации при заданном способе передачи определяется условной энтропией ![]() .
.
Отсюда следует, что минимум H(s/x) соответствует максимуму апостериорной вероятности p(s/x), а в соответствии с (5.85) — минимуму среднеквадратичного отклонения (5.86). Это означает, что оптимальный в смысле В. А. Котельникова приемник обеспечивает минимум потери информации.
Оптимальным способом передачи, очевидно, является способ, обеспечивающий максимальное значение энтропии источника сигнала
![]()
Наконец, оптимальной системой связи можно назвать систему, в которой способы передачи и приема выбраны оптимальными. В такой системе обеспечивается максимальная скорость передачи R![]() C, причем максимум в выражении (6.81) для С разыскивается по всем возможным способам передачи и приема.
C, причем максимум в выражении (6.81) для С разыскивается по всем возможным способам передачи и приема.
Из основной теории Шеннона следует, что в идеальной системе связи можно передавать информацию со скоростью R![]() C при сколь угодно малой вероятности ошибки. Для такой идеальной системы согласно (6.87) и (6.95)
C при сколь угодно малой вероятности ошибки. Для такой идеальной системы согласно (6.87) и (6.95)
![]() (9.68)
(9.68)
Отсюда при ![]() получаем:
получаем:
![]() (9.69)
(9.69)
![]() (9.70)
(9.70)
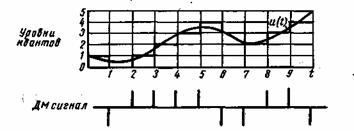
Рис. 9.6. Преобразование непрерывного сообщения при дельта-модуляции
Таким образом, в идеальной системе (ИС) выигрыш γ возрастает с увеличением v по экспоненциальному закону. Никакая реальная система не может обеспечить более высокую помехоустойчивость, чем оптимальная система.
9.8. Эффективность систем передачи непрерывных сообщений
Сравним рассмотренные выше системы модуляции по эффективности и помехоустойчивости. При этом будем полагать, что во всех системах передается одно и то же сообщение с наивысшей частотой Fm и пикфактором kП=![]() , помеха — флуктуационная, параметры систем — оптимальные.
, помеха — флуктуационная, параметры систем — оптимальные.
При сравнении будем учитывать эффективность η и выигрыш γ, характеризующий помехоустойчивость системы. Для непрерывных сообщений ф-лу (6.98) можно записать в следующем виде:
![]() (9.71)
(9.71)
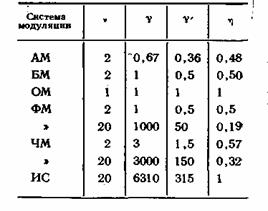
Выражения для выигрыша γ и обобщенного выигрыша ![]() полученные на основании соотношений (9.2) и (9.3), для различных видов модуляции приведены в табл. 9.2. В табл. 9.3 приведены результаты расчета эффективности и помехоустойчивости систем связи при заданном значении
полученные на основании соотношений (9.2) и (9.3), для различных видов модуляции приведены в табл. 9.2. В табл. 9.3 приведены результаты расчета эффективности и помехоустойчивости систем связи при заданном значении ![]() =40 дб.
=40 дб.
Из выражения (9.71) следует, что эффективность η и помехоустойчивость γ связаны между собой. При этом каждая из этих характеристик существенно зависит от v (ширина спектра сигнала F при заданном Fm): с увеличением v увеличивается γ и уменьшается η. Для различных систем модуляции эта зависимость имеет различный характер.
Таблица 9.2
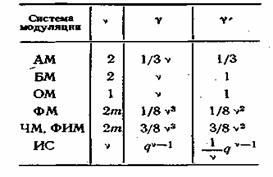
Таблица9.3
Анализ полученных данных показывает, что наибольшая эффективность связи достигается в однополосной системе. Однако помехоустойчивость этой системы, так же как и систем БМ и AM, сравнительно низкая и может быть повышена лишь за счет увеличения мощности сигнала.
Одноканальные системы ЧМ и ФИМ примерно равноценны. В этих системах, так же как и в системе ИКМ, высокая помехоустойчивость может быть достигнута за счет увеличения ширины спектра сигнала, т, е. за счет частотной избыточности.
Мощность передатчика и ширина спектра сигнала — величины неравноценные и трудно сопоставимые. Поэтому в зависимости от заданных требований к системе решается вопрос, что лучше — увеличить мощность передатчика и применить систему ОМ или AM, обладающие высокой эффективностью, или расширить полосу канала и применить один из видов широкополосной модуляции (ЧМ, например), обеспечивающих высокую помехоустойчивость, но сравнительно низкую эффективность.
Система ИКМ является наиболее совершенной из всех существующих систем связи. Эта система обеспечивает наибольшую помехоустойчивость при сравнительно высокой эффективности.
По сравнению с аналоговыми и импульсными системами цифровые системы, в том числе системы ИКМ и ДМ, обладают рядом преимуществ. Эти системы позволяют использовать наиболее совершенные способы модуляции (например, фазовую модуляцию) и применять наиболее эффективные методы приема сигналов (методы накопления, корреляционные методы и т. п.). Помехоустойчивость цифровых систем может быть существенно повышена путем применения корректирующих кодов. Возможность регенерации импульсов при цифровой передаче позволяет практически устранить накопление шумов в многозвенной системе (типа релейной) и тем самым обеспечить дальнюю связь путем ретрансляции сигналов.
Очевидно, при практическом внедрении предпочтение следует отдавать тем системам модуляции, которые при заданных условиях могут обеспечить наибольшие помехоустойчивость и эффективность. При этом необходимо учитывать конкретные условия и технико-экономические факторы, определяющие проектируемую систему связи.
Вопросы для повторения
1. Как количественно оценивается помехоустойчивость при передаче непрерывных сообщений?
2. Дайте определение понятий «выигрыш» и «обобщенный выигрыш» системы.
3. Чему равен выигрыш при AM, ОМ и БМ?
4. Чему равен выигрыш при ЧМ? За счет чего достигается большое значение выигрыша при ЧМ и ФМ?
5. Что называется порогом помехоустойчивости? В каких системах он резко выражен?
6. Какие способы снижения порога применяются при частотной модуляции?
7. Для чего применяется двойная модуляция?
8. Для чего применяются импульсные способы модуляции? В чем их преимущества по сравнению с аналоговыми системами?
9. Чему равен выигрыш в системе ФИМ-АМ? Сравните его с выигрышем для ЧМ.
10. В чем преимущества цифровых способов передачи непрерывных сообщений
11. Как формируется сигнал при ИКМ и как осуществляется прием такого сигнала?
12. Что такое шум квантования? От чего зависит его величина?
13. Что называется идеальной системой связи?
14. Дайте сравнительную оценку по помехоустойчивости и эффективности различным системам передачи непрерывных сообщений.