12.5.1. Первоначальная синхронизация
12.5.1.1. Структуры корреляторов
В системах расширенного спектра (DS и FH) для успешной демодуляции принятого сигнала приемник должен обладать синхронизированной копией расширяющего или кодового сигнала. Процесс синхронизации сгенерированного приемником расширяющего сигнала и полученного сигнала расширенного спектра обычно проходит в два этапа. На первом этапе два сигнала приводятся в грубое соответствие друг другу (процесс первоначальной синхронизации). В ходе второго этапа обработки (этап сопровождения) с помощью контура обратной связи последовательно выбирается сигнал, наиболее точно соответствующий полученному.
12.5.1. Первоначальная синхронизация
Задача данного этапа — синхронизировать полученный сигнал расширенного спектра и локально сгенерированный сигнал расширения путем поиска в двухмерной области временной и частотной неопределенности. Различают когерентные и некогерентные схемы первоначальной синхронизации. В большинстве случаев используется некогерентный метод. Это связано с тем, что обычно сужение сигнала производится до синхронизации несущей. Следовательно, фаза несущей на данном этапе неизвестна. При определении неопределенности по частоте и времени необходимо учитывать следующее.
1. Неопределенность в расстоянии между приемником и передатчиком переходит в неопределенность во времени задержки распространения сигнала.
2. Несоответствия в работе тактовых генераторов приемника и передатчика приводят к разности фаз между соответствующими расширяющими сигналами, которая имеет тенденцию к росту как функция времени, затраченного на синхронизацию.
3. Неопределенность в скорости движения приемника относительно передатчика переходит в неопределенность значения доплеровского сдвига частоты в полученном сигнале.
4. Относительное несоответствие между частотными генераторами приемника и передатчика приводит к сдвигам частот между двумя сигналами.
12.5.1.1. Структуры корреляторов
Общая особенность всех методов синхронизации — определение корреляции полученного и сгенерированного сигналов с целью создания меры их схожести. Затем эта мера сравнивается с пороговой величиной для определения, синхронны ли сигналы. Если да, приемник переходит к этапу сопровождения. В противном случае он изменяет частоту или фазу сгенерированного кода (что фактически является поиском во временной и частотной областях), после чего снова проверяется корреляция.
Рассмотрим простой пример синхронизации в системе расширения спектра методом прямой последовательности с использованием параллельного поиска (рис. 12.17). Сгенерированный приемником код g(t) передается с задержками, которые вводятся через половину периода передачи элементарного сигнала (Tc/2). Если неопределенность во времени между полученным сигналом и локальным кодом равна времени передачи Nc элементарных сигналов, а полный параллельный поиск в области временной неопределенности должен быть произведен в течение одного непрерывного временного интервала, то используется 2Nc корреляторов. Все корреляторы одновременно изучают последовательность из ![]() . элементарных сигналов, после чего сравниваются выходы всех корреляторов. В завершение выбирается локальный код, соответствующий коррелятору с максимальным выходом. Концептуально - это простейший метод поиска; в нем одновременно анализируются все возможные позиции кода (или фрагментов кода) и для выбора нужного кода используется алгоритм максимального правдоподобия. Выходной сигнал каждого детектора является суммой полученного сигнала и шума. По мере возрастания
. элементарных сигналов, после чего сравниваются выходы всех корреляторов. В завершение выбирается локальный код, соответствующий коррелятору с максимальным выходом. Концептуально - это простейший метод поиска; в нем одновременно анализируются все возможные позиции кода (или фрагментов кода) и для выбора нужного кода используется алгоритм максимального правдоподобия. Выходной сигнал каждого детектора является суммой полученного сигнала и шума. По мере возрастания ![]() , вероятность возникновения ошибки синхронизации (т.е. неверного согласования кода) уменьшается. Следовательно, величину
, вероятность возникновения ошибки синхронизации (т.е. неверного согласования кода) уменьшается. Следовательно, величину ![]() , следует выбирать таким образом, чтобы одновременно минимизировать время поиска и вероятность возникновения ошибок синхронизации.
, следует выбирать таким образом, чтобы одновременно минимизировать время поиска и вероятность возникновения ошибок синхронизации.
Рис.12.17. Получение синхронизации в схеме прямой последовательности с использованием метода параллельного поиска
На рис. 12.18 приводится схема синхронизации системы связи со скачкообразной перестройкой частоты. Предположим, что в качестве шаблона синхронизации (без модуляции данных) используется последовательность из N частот, являющаяся частью последовательности скачков частоты. Для первичной обработки полученного сигнала применяется N некогерентных согласованных фильтров, каждый из которых состоит из смесителя частот, полосового фильтра и квадратичного детектора огибающей (последовательно соединенного детектора огибающей и квадратичного устройства). Если процесс скачкообразной перестройки частоты можно описать последовательностью f1, f2,..., fN, времена задержки фильтров подбираются таким образом, что при появлении искомой серии скачков частоты система дает выходной сигнал значительной мощности, который и указывает на обнаружение нужной последовательности. Процесс синхронизации может выполняться довольно быстро, поскольку все возможные отклонения кода анализируются одновременно. Следует отметить, что наличие на рис. 12.18 полосовых фильтров указывает, что частоты локального генератора f1, f2,..., fN выбраны таким образом, чтобы их отклонение от ожидаемой частоты сигнала было равно определенной промежуточной частоте (intermediate frequency — IF). Та же система может быть реализована так, что частоты, полученные генератором приемника, будут выбираться без сдвига. Тогда на выходе смесителей будут образовываться узкополосные сигналы. В этом случае фильтры должны быть фильтрами нижних частот (low-pass filter — LPF). В процессе смешивания обычно получается комплексный сигнал, состоящий из синфазного и квадратурного компонентов.
Рис.12.18. Получение синхронизации для системы связи со скачкообразной перестройкой частоты
Если в течение каждого процесса определения корреляции обрабатываются ![]() элементарных сигналов длительностью Тскаждый, максимальное время полного параллельного поиска можно записать в следующем виде.
элементарных сигналов длительностью Тскаждый, максимальное время полного параллельного поиска можно записать в следующем виде.
![]() (12.30)
(12.30)
Среднюю длительность процесса синхронизации можно оценить с помощью параметра вероятности обнаружения PD. PD характеризует вероятность правильного завершения процесса после обработки ![]() элементарных сигналов. Если полученный результат неверен, будут обработаны последующие
элементарных сигналов. Если полученный результат неверен, будут обработаны последующие ![]() элементарных сигналов. Следовательно, средняя длительность процесса обнаружения может быть записана следующим образом [4].
элементарных сигналов. Следовательно, средняя длительность процесса обнаружения может быть записана следующим образом [4].
 (12.31)
(12.31)
Поскольку число корреляторов или согласованных фильтров, необходимых для полного выполнения процесса параллельного обнаружения, может быть чрезвычайно большим, указанный метод на практике, как правило, не применяется. Вместо схем, изображенных на рис. 12.17 и 12.18, может быть использован единичный коррелятор или согласованный фильтр, производящий последовательный поиск до достижения синхронизации. Как и следовало ожидать, компромисс между методами параллельного и последовательного поиска — это компромисс между сложной технической реализацией с быстрой синхронизацией и простой технической реализацией с большим временем синхронизации (при равных скорости передачи данных и неопределенности).
12.5.1.2. Последовательный поиск
Для синхронизации довольно часто используется единичный коррелятор или согласованный фильтр в совокупности с методом последовательного поиска нужной фазы (сигнал DS) или последовательности скачков частоты (сигнал FH). Последовательное повторение процедуры определения корреляции позволяет значительно снизить сложность, размер и стоимость системы. На рис. 12.19 и 12.20 представлены основные конфигурации данной схемы в системе связи расширенного спектра методом прямой последовательности (DS) и скачкообразной перестройки частоты (FH). При пошаговом последовательном получении синхронизации в системе DS устанавливается период синхронизации псевдослучайного локального кода и определяется корреляция данного кода с полученным псевдослучайным сигналом. В течение интервалов поиска ![]() Тc, где
Тc, где ![]() >>1, выходной сигнал сравнивается с заданным пороговым значением. Если порог не достигнут, выходной сигнал увеличивается на установленную часть (обычно 1/2) элементарного сигнала и проверка повторяется. По достижении порогового значения считается, что псевдослучайный код синхронизирован; в результате увеличение фазы кода приемника прекращается, и система переходит к этапу сопровождения. Для системы FH (рис. 12.20) генератор псевдослучайного кода управляет устройством скачкообразной перестройки частоты. Процесс получения синхронизации считается завершенным, когда последовательность скачков частоты локального сигнала совпадает со скачками частоты полученного сигнала.
>>1, выходной сигнал сравнивается с заданным пороговым значением. Если порог не достигнут, выходной сигнал увеличивается на установленную часть (обычно 1/2) элементарного сигнала и проверка повторяется. По достижении порогового значения считается, что псевдослучайный код синхронизирован; в результате увеличение фазы кода приемника прекращается, и система переходит к этапу сопровождения. Для системы FH (рис. 12.20) генератор псевдослучайного кода управляет устройством скачкообразной перестройки частоты. Процесс получения синхронизации считается завершенным, когда последовательность скачков частоты локального сигнала совпадает со скачками частоты полученного сигнала.
Рис.12.19. Процесс последовательного поиска для системы, использующей метод прямой последовательности
Рис.12.20. Процесс последовательного поиска для системы с перестройкой частоты
Максимальное время последовательного поиска для системы DS с шагом увеличения 1/2 элементарного сигнала равно следующему.
![]() (12.32)
(12.32)
Здесь размер области неопределенности, в которой выполняется поиск, равен длительности Nc элементарных сигналов. Среднее время получения синхронизации при использовании последовательного поиска для системы DS при Nc>>1/2 будет следующим [10]:
 (12.33)
(12.33)
где ![]() Тс — интервал поиска, PD — вероятность правильного обнаружения, PFA — вероятность ложной тревоги. Определим время, необходимое для проверки правильности обнаружения, равным K
Тс — интервал поиска, PD — вероятность правильного обнаружения, PFA — вероятность ложной тревоги. Определим время, необходимое для проверки правильности обнаружения, равным K![]() Tc, где K>>1. Таким образом, при ложной тревоге будет потеряно K
Tc, где K>>1. Таким образом, при ложной тревоге будет потеряно K![]() Tc секунд. При Nc>>
Tc секунд. При Nc>>![]() и К<<2Nc дисперсия времени синхронизации будет равна следующему.
и К<<2Nc дисперсия времени синхронизации будет равна следующему.
 (12.34)
(12.34)
12.5.1.3. Последовательная оценка
Схема использования еще одного метода поиска, быстрой синхронизации путем последовательной оценки (rapid acquisition by sequential estimation — RASE), приводится на рис. 12.21. Впервые данный метод был использован Р. Уордом (R. Ward) [10]. Изначально переключатель находится в положении "1". Система вводит свою лучшую оценку первых п элементов полученного сигнала в п разрядов генератора псевдослучайной последовательности. Заполненный регистр определяет начальное состояние генератора. Одним из свойств псевдослучайной последовательности является то, что каждое последующее состояние разрядов зависит только от предыдущего. Следовательно, если оценка первых и элементарных сигналов выполнена верно, все последующие сигналы генератора псевдослучайной последовательности будут правильными. Когда анализ первой последовательности элементарных сигналов закончен, переключатель устанавливается в положение "2". Если начальное состояние регистра было определено верно, генератор приемника создает сигналы, идентичные принятым (при отсутствии шумов). Если выходной сигнал коррелятора после ![]() Тc превышает установленный пороговый уровень, считается, что синхронизация выполнена успешно. В противном случае переключатель возвращается в положение "1", данные регистра обновляются и вся последовательность операций повторяется. Как только система синхронизируется, полученная последовательность элементарных сигналов больше не оценивается. Определим минимальное время синхронизации, считая, что шумы отсутствуют. Первые п элементарных сигналов корректно загружены в регистр, поэтому можем записать следующее.
Тc превышает установленный пороговый уровень, считается, что синхронизация выполнена успешно. В противном случае переключатель возвращается в положение "1", данные регистра обновляются и вся последовательность операций повторяется. Как только система синхронизируется, полученная последовательность элементарных сигналов больше не оценивается. Определим минимальное время синхронизации, считая, что шумы отсутствуют. Первые п элементарных сигналов корректно загружены в регистр, поэтому можем записать следующее.
![]() (12.35)
(12.35)
Рис.12.21. Быстрая синхронизация путем последовательной оценки
Если скорость синхронизации является главным преимуществом системы RASE, ее основной недостаток — высокая чувствительность к помехам и интерферирующим сигналам. Причина такой чувствительности состоит в том, что процесс оценки включает поэлементную демодуляцию по принципу жесткого решения, что не позволяет воспользоваться помехоустойчивыми свойствами псевдослучайного кода. Более подробное описание систем последовательной оценки приводится в работе [4].
12.5.2. Сопровождение
По окончании этапа (грубой) синхронизации начинается этап сопровождения, или достижения идеальной синхронизации. Различают когерентные и некогерентные контуры сопровождения. Когерентным называется контур, где известны частота и фаза несущей волны, а контур сопровождения может работать с узкополосным сигналом. Если же частоту несущей точно определить невозможно (например, из-за доплеровского эффекта) — имеем некогерентный контур. Поскольку в большинстве случаев фаза и частота несущей априори не известны точно, для сопровождения полученного псевдослучайного кода используются именно некогерентные контуры. Кроме того, различают контуры постоянного сопровождения с задержкой и опережением (full-time early-late tracking loop), часто называемые контурами автоподстройки по задержке (delay-locked loop — DLL), и контуры сопровождения с задержкой и опережением с разделением времени (time-shared early-late tracking loop), часто именуемые контурами внесения искусственных флуктуации (tau-dither loop — TDL). Простой пример применения некогерентного контура DLL в системе расширения спектра методом прямой последовательности при использовании двоичной фазовой манипуляции (binary phase-shift keying — BPSK) представлен на рис. 12.22. Несущая модулируется информационным сигналом x(t) и кодовым сигналом g(t) с использованием схемы BPSK. Как и ранее, считаем, что шумы и интерференция отсутствуют, поэтому можем записать следующее.
![]() (12.36)
(12.36)
Рис.12.22. Использование контура DLL для сопровождения сигналов системы DS/SS
Здесь А — коэффициент усиления системы; ![]() — случайный угол сдвига фаз в диапазоне (0,2
— случайный угол сдвига фаз в диапазоне (0,2![]() ). Сгенерированный контуром сопровождения кодовый сигнал сдвинут по отношению к полученному сигналу g(t) на время
). Сгенерированный контуром сопровождения кодовый сигнал сдвинут по отношению к полученному сигналу g(t) на время ![]() , причем
, причем ![]() < Tc/2. Для проведения точной синхронизации контур генерирует две псевдослучайные последовательности: g(t + Tc/2 +
< Tc/2. Для проведения точной синхронизации контур генерирует две псевдослучайные последовательности: g(t + Tc/2 +![]() ) и g(t - Tc/2 +
) и g(t - Tc/2 + ![]() ), одна из которых отстает от другой на время передачи элементарного сигнала. Два узкополосных фильтра предназначаются для пропускания данных, а также для усреднения произведения g(t) и двух псевдослучайных последовательностей g(t±Tc/2+
), одна из которых отстает от другой на время передачи элементарного сигнала. Два узкополосных фильтра предназначаются для пропускания данных, а также для усреднения произведения g(t) и двух псевдослучайных последовательностей g(t±Tc/2+![]() ) (в работе [4] указывается оптимальная ширина полосы для данного типа фильтров). Квадратичный детектор огибающей исключает данные, поскольку |x(t)| = 1. Выход каждого детектора огибающей можно приблизительно записать следующим образом.
) (в работе [4] указывается оптимальная ширина полосы для данного типа фильтров). Квадратичный детектор огибающей исключает данные, поскольку |x(t)| = 1. Выход каждого детектора огибающей можно приблизительно записать следующим образом.
 (12.37)
(12.37)
Оператор Е{![]() } обозначает математическое ожидание, a Rg(x) — это автокорреляционная функция псевдослучайного сигнала, как показано на рис. 12.8. Сигнал обратной связи Y(
} обозначает математическое ожидание, a Rg(x) — это автокорреляционная функция псевдослучайного сигнала, как показано на рис. 12.8. Сигнал обратной связи Y(![]() ) представлен на рис. 12.23. Если
) представлен на рис. 12.23. Если ![]() больше нуля, Y(
больше нуля, Y(![]() ) указывает генератору, управляемому напряжением, (ГУН) увеличить частоту, что приводит к уменьшению
) указывает генератору, управляемому напряжением, (ГУН) увеличить частоту, что приводит к уменьшению ![]() . Если значение
. Если значение ![]() отрицательно, частота ГУН уменьшается, в результате
отрицательно, частота ГУН уменьшается, в результате ![]() возрастает. Если
возрастает. Если ![]() — это достаточно малая величина, g(t)g(t+
— это достаточно малая величина, g(t)g(t+ ![]() ) = 1, что дает в итоге суженный сигнал Z(t). Впоследствии Z(t) подается на вход обычного демодулятора данных. Подробное описание использования контуров DLL приводится в работах [4, 12-14].
) = 1, что дает в итоге суженный сигнал Z(t). Впоследствии Z(t) подается на вход обычного демодулятора данных. Подробное описание использования контуров DLL приводится в работах [4, 12-14].
Недостатком контура DLL является то, что цепи опережения и запаздывания должны быть точно синхронизированы, иначе Y(![]() ) будет сдвинут по фазе и, соответственно, его значение будет ненулевым при нулевой ошибке. Данная проблема решается с помощью контура с разделением времени. В таком контуре опережающий и запаздывающий корреляторы используются в разное время. Очевидным преимуществом является то, что для работы контура достаточно одного коррелятора. Кроме того, снижается актуальность проблемы смещения постоянной составляющей.
) будет сдвинут по фазе и, соответственно, его значение будет ненулевым при нулевой ошибке. Данная проблема решается с помощью контура с разделением времени. В таком контуре опережающий и запаздывающий корреляторы используются в разное время. Очевидным преимуществом является то, что для работы контура достаточно одного коррелятора. Кроме того, снижается актуальность проблемы смещения постоянной составляющей.
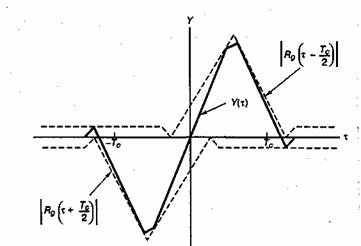
Рис.12.23. Y(![]() )- сигнал обратной связи контура DLL
)- сигнал обратной связи контура DLL
При нормальной работе многих управляющих контуров контрольный сигнал практически равен нулю. С этим связан один из недостатков таких систем — нулевой сигнал часто приводит к тому, что контур становится неуправляемым. Особенно остро эта проблема проявляется в сложных контурах сопровождения, которые изменяют коэффициент усиления в зависимости от внешних условий. На рис. 12.24 представлен контур TDL; это одна из разновидностей схем сопровождения с разделением времени. Для решения проблемы нулевого сигнала в данном контуре вводится небольшая намеренная погрешность. В результате выходной сигнал контура как бы "вибрирует" вокруг точного сигнала. Обычно отклонение от нормы невелико, поэтому потери в производительности минимальны. Преимущество контура TDL состоит в том, что для выполнения функций сопровождения и сужения кодовой последовательности достаточно одного коррелятора. Как и в случае DLL, проверяется корреляция полученного сигнала с опережающей и запаздывающей версиями псевдослучайного кода приемника. Как показано на рис. 12.24, генератором псевдослучайного кода управляет синхронизирующий сигнал, в фазу которого добавляются псевдослучайные флуктуации, лежащие в пределах квадратичной коммутационной функции. Постоянные изменения фазы позволяют избежать нарушений в работе контура, устраняя необходимость слежения за идентичностью функций в опережающем и запаздывающем контурах. Если боковые фильтры контура TDL спроектированы должным образом, отношение сигнал/шум в этом контуре будет меньше приблизительно на 1,1 дБ по сравнению с контуром DLL [4]. Более подробное описание синхронизации псевдослучайных кодов приводится в работах [4, 15, 16].