Определим условия оптимального приема непрерывных сообщений. Пусть сообщение представляет собой некоторое колебание (ut), которое может непрерывно изменяться со временем и принимать любую форму. С такими сообщениями мы встречаемся, например, в телефонии, телевидении, телеметрии.
Для простоты анализа будем считать, что функция u(t) принимает значения в пределах от +1 до -1. Будем также полагать, что передаваемое колебание является периодическим с периодом (это всегда можно допустить, взяв Т достаточно большим) и что спектр этого колебания ограничен частотами от i![]() /T до i
/T до i![]() /T. При этих условиях функцию u(t) можно представить согласно (2.70) в виде
/T. При этих условиях функцию u(t) можно представить согласно (2.70) в виде
![]() (5.83)
(5.83)
где ![]() —некоторые параметры, определяющие передаваемое колебание и(t), φe(t)—единичные ортогональные функции,
—некоторые параметры, определяющие передаваемое колебание и(t), φe(t)—единичные ортогональные функции, ![]()
Для передачи по каналу колебание u(t) преобразовывается в сигнал s(u, t). Поскольку колебание (5.83) определяется ![]() параметрами
параметрами ![]() , то сигнал будет зависеть от этих параметров:
, то сигнал будет зависеть от этих параметров: ![]() . Принятый сигнал вследствие наложения помехи ω(t) равен
. Принятый сигнал вследствие наложения помехи ω(t) равен ![]() .
.
Задача заключается в том, чтобы по колебанию x(t) восстановить переданное сообщение u(t) с возможно большей точностью. Как мы уже установили, самое большее, что может сделать приемник на основе анализа принятого сигнала x(t), это вычислить распределение вероятностей P(s/x) для всех возможных реализаций u(t). При передаче непрерывных колебаний функция P(s/x) есть плотность распределения вероятности.
Согласно (5.2) оптимальный приемник вычисляет апостериорное распределение вероятностей P(s/x) и выдает на выходе ту реализацию сообщения u(t), при которой функция P(s/x) будет максимальна. При этом приемник не обязательно должен определять апостериорное распределение вероятностей P(s/x) в явном виде— он должен выдавать на выходе результат, эквивалентный этой функции.
Согласно формуле Байеса (5.3) выражение P(s/x) для рассматриваемого случая можно записать в следующем виде:
![]() (5.84)
(5.84)
где k — некоторая постоянная, которая может быть вычислена из условия нормировки ![]() .
.
Полагаем, что все возможные сообщения u(t) и соответствующие им сигналы s(u, t) равновероятны, т. е. P(s)=const для всех реализаций u(t), лежащих в интервале (-1, +1). При этом согласно (5.26) и (5.84)
 (5.85)
(5.85)
Отсюда максимуму апостериорной вероятности P(s/x) соответствует минимум по u(t) величины
 (5.86)
(5.86)
Таким образом, оптимальный приемник должен воспроизводить сообщение u(t), при котором среднеквадратическое отклонение Δ2 имеет минимальное значение. При отсутствии то мех такой приемник воспроизводит сообщение без искажений (без ошибок): x(t)=s(u, t), v(t)=u(t) и Δ2=0, при наличии помех ошибка будет минимальной.
Из выражения (5.86) следует, что операции оптимальной фильтрации и детектирования дают достаточное решение задачи об извлечении максимальной информации из принятого сигнала x(t) относительно переданного сообщения u(t). Структурная схема приемника с, оптимальным фильтром приведена на рис. 5.11.
Рис. 5.11. Структурная схема оптимального приемника непрерывных сигналов
Теория линейной фильтрации. Колмогорова—Винера для стационарных процессов была рассмотрена в § 4.8. Согласно этой теории коэффициент передачи оптимального фильтра определяется выражением (4.63), а минимальная среднеквадратическая ошибка фильтрации — выражением (4.65). Практическая реализация таких фильтров сопряжена с большими трудностями. А если учесть, что реальные модулированные сигналы не являются стационарными, то задача построения оптимального фильтра на базе лилейной теории становится практически неразрешимой. Недостатком этой теории является и то, что линейный фильтр оптимален для сигнала s(u, t), а не для самого сообщения u(t). Поэтому представляет интерес рассмотреть другие пути построения оптимального приемника непрерывных сообщений.
Запишем выражение (5.85) в другом виде:
 (5.87)
(5.87)
Первый экспоненциальный множитель, не зависящий от и, может быть включен в постоянную k![]() . Второй множитель вообще не представляет операции над x(t), он может быть вынесен в виде отдельного множителя, подобного априорной вероятности во многих случаях этот множитель, равный ехр(-E/N0), где Е — энергия сигнала, также можно включить в постоянную k
. Второй множитель вообще не представляет операции над x(t), он может быть вынесен в виде отдельного множителя, подобного априорной вероятности во многих случаях этот множитель, равный ехр(-E/N0), где Е — энергия сигнала, также можно включить в постоянную k![]() . Следовательно, выражение (5.87) можно записать
. Следовательно, выражение (5.87) можно записать
![]() (5.58)
(5.58)
где  (5.89)
(5.89)
Отсюда следует, что при известной априорной вероятности определение апостериорной вероятности сводится к вычислению функции h(u), т. е. к вычислению взаимной корреляции между принятым сигналом x(t) и переданным (ожидаемым) сигналом s(u, t).. Иными словами, корреляционная обработка сигнала является оптимальной.
Функция h(u) легко вычисляется, когда сигнал является полностью известным. Достигается это с помощью коррелятора или согласованного фильтра. Такая ситуация обычно имеет место при передаче дискретных сообщений (§ 5.3).
При передаче непрерывных сообщений сигнал s(u, t) не является полностью известным. Однако мы располагаем некоторой, априорной информацией об этом сигнале. Известны, например, несущая частота, вид модуляции, ширина спектра сигнала и т. п. Недостающую часть информации можно получить в результате наблюдения над принятой реализацией сигнала x(t) за предшествующий промежуток времени. В результате имеется возможность на приеме определить оценку сигнала s(v, t) и вычислить функцию h(v) для этой оценки:
 (5.90)
(5.90)
Функцию h(v) можно вычислить с помощью фильтра с переменными параметрами (рис. 5.12) или схемы следящего коррелятора (рис. 5.1.3). Каждая из этих схем имеет основной информационный канал, на выходе которого получается оценочное значение v(t) передаваемого сообщения u(t), и канал обратной связи, с помощью которого в схеме рис. 5.13
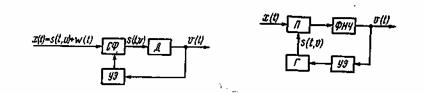
Рис. 5.12. Структурная схема Рис. 5.13. Структурная
приемника со следящим филь- схема следящего корре-
тром ляционного приемника
формируется опорный сигнал s(v, t), а в схеме рис. 5.12 производится изменение параметров фильтра. В схеме рис. 5.12 с помощью управляющего элемента (УЭ) изменяют параметры фильтра (СФ) так, чтобы он был согласован с непрерывно изменяющимся ожидаемым сигналом s(t, v). В схеме же рис. 5.1З с помощью УЭ изменяется модулируемый параметр несущего колебания, формируемого генератором Г. При частотной модуляций, например, этим параметром является частота, при времяимпульсной модуляции — временной сдвиг импульсов и т. п. Фильтр нижних частот (ФНЧ),в этой схеме выполняет роль интегратора на интервале наблюдения Т, который связан с максимальной частотой Fm в спектре передаваемого сообщения соотношением Т=1/2Fm.
При различных видах модуляции принцип следящего приема остается тем же. Вид модуляции определяет параметр, за которым должно осуществляться слежение. Схемы следящего приема позволяют практически реализовать помехоустойчивость, близкую к потенциальной, и тем самым, как будет показано в § 9.3, снизить порог помехоустойчивости до его предельного значения.
До сих пор мы предполагали, что амплитуда и фаза несущего колебания сигнала неизменны во времени, а помеха имеет постоянную спектральную плотность ![]() . В каналах с переменными параметрами амплитуда и фаза сигнала изменяются во времени. В этом случае схемы рис. 5.12 и рис. 5.13 должны быть дополнены устройством автоматической регулировки уровня сигнала и системой фазовой автоподстройки. При неизвестном значении
. В каналах с переменными параметрами амплитуда и фаза сигнала изменяются во времени. В этом случае схемы рис. 5.12 и рис. 5.13 должны быть дополнены устройством автоматической регулировки уровня сигнала и системой фазовой автоподстройки. При неизвестном значении ![]() или его изменении во времени для осуществления оптимального приема необходимо специальное устройство измерения и выравнивания интенсивности помех. В частности, для сосредоточенных по спектру или во времени помех с резко выраженной интенсивностью, достаточно близкой к оптимальной оказывается схема со стиранием участков спектра или длительности сигнала, пораженных помехой (см. § 8.8).
или его изменении во времени для осуществления оптимального приема необходимо специальное устройство измерения и выравнивания интенсивности помех. В частности, для сосредоточенных по спектру или во времени помех с резко выраженной интенсивностью, достаточно близкой к оптимальной оказывается схема со стиранием участков спектра или длительности сигнала, пораженных помехой (см. § 8.8).
Таким образом, в общем случае при оптимальном приеме необходимо осуществлять слежение за формой как сигнала, так и помехи. Чем большее число параметров при этом будет учтено, тем выше будет помехоустойчивость. При этом схема приемника должна быть адаптивной.
Оптимальный приемник представляет собой устройство, воспроизводящее переданное сообщение u(t) с наименьшей ошибкой. Так как полезный сигнал s(u, t) зависит от u(t) нелинейно, то оптимальный приемник также должен быть нелинейным устройством (нелинейным фильтром). Примером такого устройства (фильтра) является рассмотренный выше следящий приемник. Таким образом, теорию оптимального приема можно рассматривать как теорию оптимальной нелинейной фильтрации.
Общая теория нелинейной фильтрации охватывает разнообразные и весьма сложные задачи. В настоящее время эта теория разработана лишь для случаев, когда переданное сообщение u(t) представляет собой марковский или нормальный случайный процесс [9].