1. Классификация, типовое обеспечение и интеграция современных автоматизированных систем управления
1.1. Классификация автоматизированных систем управления
1.2. Современная модель автоматизации промышленного предприятия
2. Государственная система приборов и средств автоматизации
2.1. Организации по разработке и изданию стандартов
3. Технические средства получения информации о состоянии процесса
3.1. Измерительные устройства ГСП. Сигналы и параметры
3.2. Основные параметры датчиков
3.2.1. Статическая характеристика датчика
4. Измерительные преобразователи
4.5. Термоэлектронный преобразователь (термопара)
4.6. Бесконтактное измерение температуры
4.8.1. Индуктивный датчик на дросселе
4.10. Пьезоэлектрические датчики
4.11.1. Фотоэлектрические датчики положения
5. Преобразователи АЦП и ЦАП (DAC & ADC)
5.1. Преобразование аналогового сигнала в цифровую форму
6. Исполнительные элементы автоматики. Двигатели постоянного тока
6.2. Конструкция и принцип действия двигателя постоянного тока
6.3. Режимы работы и основные уравнения ДПТ
6.4. Характеристики ДПТ с независимым возбуждением
6.6. Механические характеристики ДПТ с последовательным и смешанным возбуждением
7.1. Принцип действия асинхронного двигателя
7.2. Статические характеристики асинхронного двигателя
7.3. Управление асинхронными двигателями
8.1. Принцип действия и виды синхронных двигателей
8.2. Специальные синхронные двигатели
9. Электромагнитные устройства автоматики
9.1. Электромагнитное реле постоянного и переменного тока
9.1.2. Основные этапы работы реле
9.2. Контакторы и магнитные пускатели
1. Классификация, типовое обеспечение и интеграция современных автоматизированных систем управления
1.1. Классификация автоматизированных систем управления
АСУ ТП – автоматизированная система управления технологическим процессом, представляющая человеко-машинную систему, предназначенную для выработки и реализации управления технологическим объектом управления в соответствии с некоторым принятым критерием.
Технологический объект управления (ТОУ) – это совокупность технологического оборудования и реализованного на нем по регламенту процесса производства. В качестве технологического объекта управления могут рассматриваться: отдельные установки и агрегаты; группы станков, выполняющих набор последовательных операций и образующих единую технологическую линию; отдельные производственные структуры (участок, цех), выполняющие самостоятельные технологические процессы и некоторый процесс производства в целом.
В зависимости от решаемых задач АСУ ТП может иметь различную структуру; выделяют 3 класса АСУ ТП: локальные, централизованные и распределенные системы управления.
Локальная система управления используется для управления технологически независимым объектом с компактно расположенным оборудованием, и несложными задачами управления. Примеры локальных систем: системы стабилизации, следящие, программного управления. Основные элементы локальной системы: ТОЭ, датчики, исполнительное устройство и локальный регулятор. В системе обычно предусматриваются элементы ручного управления и связи с оператором. Рис.1
В зависимости от реализации регулятора локальные системы могут быть как аналоговыми так и цифровыми.

Рис.1. Типовая структура локальной системы управления
Централизованная система управления используется для управления сосредоточенным объектом со сложными или разнообразными функциями управления или большим количеством сигналов «вход-выход». В системе есть два уровня: на нижнем уровне находятся объекты управления с датчиками и исполнительными устройствами на верхнем управляющая вычислительная машина (УВМ) и устройство сопряжения с объектом (УСО). УСО преобразует различные по виду сигналы от датчиков (входные сигналы), в цифровой код в формате, определяемом конкретной УВМ. Сформированные УВМ в виде цифрового кода сигналы управляющих воздействий для исполнительных устройств (выходные сигналы) УСО преобразует к одному из стандартных видов. Для контроля над процессом предусмотрен пульт связи с оператором. Все процессы обработки сигналов датчиков и формирование управляющих сигналов для всех контуров управления последовательно исполняет одна и та же УВМ. Она также обеспечивает интерфейс с оператором.
Централизованная система имеет два основных недостатка: малая надежность и низкое быстродействие. Система становиться неработоспособной при отказе УВМ или УСО. При большом количестве датчиков и контуров управления существенно увеличивается время основного цикла управляющей программы УВМ. Для устранения этих недостатков применяют следующие решения.
Для повышения надежности осуществляется: а) Дублирование основных элементов системы управления: УВМ и УСО; б) Применение супервизорной структуры.
Для повышения быстродействия передают часть функций управления на более низкий уровень: а) Применение супервизорной структуры. б) Переход к распределенной многоуровневой системе управления. Рис.2.
В супервизорной структуре с верхнего уровня на нижний передаются в цифровом виде значения уставок для регулятора и команды для локального контроллера, а с нижнего уровня на верхний параметры объекта, также в цифровом виде. Непосредственное управление в контуре выполняет локальный контроллер.
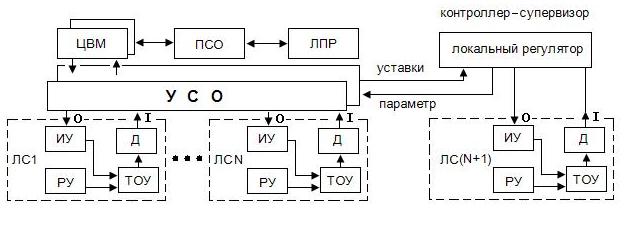
Рис. 2. Типовая структура централизованной системы управления
1.2. Современная модель автоматизации промышленного предприятия
Распределенная система управления (РСУ) содержит несколько уровней. Модель АСУП предполагает, что САУ различного уровня интегрированы в единую систему, охватывающую весь процесс жизнедеятельности предприятия. Модель имеет форму пирамиды. Опишем ее, начиная с основания. Иерархическая структура и типовая схема многоуровневой РСУ приведена ниже на рис 3 и 4.
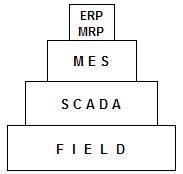
Рис. 3. Иерархическая структура распределенной системы управления
a) Самый нижний уровень (Field, полевой) включает ТОУ, управляемый узлом на базе PLC или Prom PC и непосредственно связанные с ним элементы: датчики и исполнительные устройства. На этом уровне обмен информацией производится по
AS – интерфейсу. Название AS происходит от слов датчик (Sensor) и исполнительное устройство (Activator).
b) Следующий уровень (PLC, ПЛК) объединяет устройства локального управления и интерфейсы между ними. Этими устройствами являются локальные регуляторы и программируемые логические контроллеры (ПЛК).
c) На следующем уровне (участка (cell)) расположена (SCADA) – система диспетчерского управления и сбора данных.
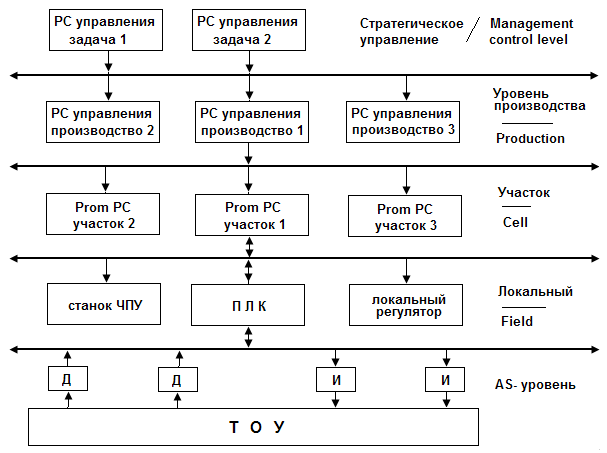
Рис. 4. Типовая структура распределенной системы управления
SCADA системы могут быть 3 видов.
1. DCS – распределенная система управления, обеспечивающая управление в масштабе установки или небольшого цеха. (Siemens, ABB).
Основной элемент такой системы – это функциональный узел на основе PLC или Prom PC.Узлы объединены в разнородную сеть по различным интерфейсам (основной протокол - каждый с каждым). Рис.5.
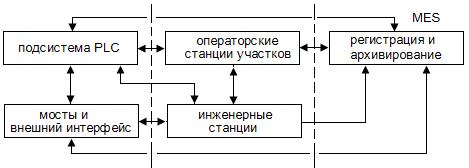
Рис. 5. Структура SCADA системы типа DCS
Каждый узел выполняет некоторый набор задач из следующего списка:
а) сбор и первичная обработка данных участка;
б) управление частью ИУ участка;
в) связь с другими узлами/системами
г) пользовательский интерфейс и отображение данных участка;
2. Классическая SCADA: ее особенности:
а) однородная промышленная сеть;
б) клиент-серверная архитектура;
в) более четкая специализация узлов;
г) более развитой человеко-машинный интерфейс (HMI);
д) фильтрация и архивация текущих данных.
Дополнительно SCADA при соответствующем установленном программном обеспечении (ПО) может решать задачи прогноза и/или оптимизации.
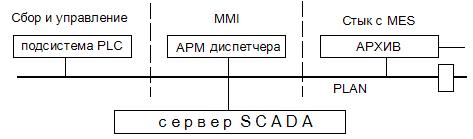
Рис.6 Структура SCADA системы с выделенным сервером.
3. Batch Control. Распределенная система управления, выполненная в соответствии с требованиями стандарта 968.01 ISA.
Ее особенность это использование последовательного пакетного управления, ориентированного на регулирование системы, состоящей из ряда последовательных связанных участков с обеспечением качества и оптимизацией выхода конечного продукта.
Предполагается особая модель объекта управления, используемая в таких областях, как: нефтехимия, фармация, пищевая, строительная промышленность.
d) Уровень организации производства, цеха (production management). На этом уровне функционирует исполнительная система производства MES. Это промежуточный слой, который служит для организации технологической подготовки производства. На этом и последующих уровнях расположены, объединенные в сеть промышленные РС и АРМы специалистов. На этом уровне решаются задачи:
- планирование и контроль последовательных операций любых ТП.
- управление производственными (станки) и людскими (персонал) ресурсами в рамках нескольких ТП;
- распределение работ по заказам;
- техническое обслуживание оборудования;
- управление качеством.
e) АСУ Предприятием –это уровень стратегического планирования.
На этом уровне решаются различные классы задач для этого существуют отдельные подсистемы. Вот основные типы подсистем и задач на этом уровне:
MRP – планирование ресурсов на уровне цеха. В основе MRP лежит BOM (Bill of Material). В MRP II добавляется управление складскими запасами и производственными мощностями, в EAM добавляется управление основными фондами.
ERP I – планирование ресурсов предприятия в целом на основе бизнес-планов. Задачи:
а) управление снабжением и сбытом;
б) выпуск всех видов продукции и распределение заказов;
в) контроль за материальным и финансовым потоками.
ERP II добавляются взаимоотношения с поставщиками, дилерами, реклама и PR.
IRP – интеллектуальное планирование ресурсов на основе создания динамической модели предприятия.
Зачем это надо. Стандарты ISO-9000
Одно из основных условий выхода продукции предприятия на международный рынок – его сертификация по стандартам ISO-9000. Во всемирной торговой организации (ВТО) обязательным требованием является, что или поставщик имеет сертификат ISO-9000, или продажа идет через посредника с ISO-9000. Важнейшие требования, входящие в ISO-9000: идентифицируемость продукта, наблюдаемость и управляемость ТП и материальных потоков. Сертифицированные интегрированные системы АСУ ТП, объединяющие MRP+MES+SCADA эти требования обеспечивают.
Кроме этих уровней АСУ ТП, и программно-аппаратных комплексов, их обеспечивающих, интегрированная система должна сопрягаться еще и с системами САПР: (CAD/CAM/CAE/PDM), системами описания бизнес-процессов, системами программирования PLC и многими другими.
В наше время даже крупнейшие интегрированные системы R3, BAAN Oracle Application не решают всего комплекса задач.
1.3. Функции и компоненты типового обеспечения АСУТП
Функции типового обеспечения АСУТП делятся на управляющие, информационные и вспомогательные.
Информационные функции (мониторинг) включают в себя сбор значений переменных процесса, их хранение, отображение в подходящей для человека форме и передача на следующие уровни системы.
Управляющие функции – это выработка и реализация прямых или опосредованных воздействий на параметры объекта управления: регулирование, логическое управление, оптимальное управление режимами или стадиями процесса, адаптивное управление объектом в целом.
Вспомогательные функции сводятся главным образом к диагностике функционирования технических и программных средств АСУТП и поддержанию их в рабочем состоянии. Информационной основой для каждого процесса реального времени (RT) поддерживающего АСУТП, служит база данных процесса, имеющая специфическую структуру
В целом АСУТП включает в себя техническое, программное, информационное обеспечение как основу системы и организационное обеспечение, регламентирующее участие персонала в работе АСУТП.
Техническое обеспечение АСУТП осуществляется комплексом технических средств (КТС), содержащем устройства получения информации о параметрах технологического процесса и состоянии технологического оборудования; формирования и передачи управляющей информации; представления информации персоналу и на другие уровни АСУТП.
Программное обеспечение включает в себя общее программное обеспечение (ПО) в комплекте со средствами вычислительной техники (ВТ) и специальную совокупность программ, реализующих функционирование системы данного типа и конкретный набор функций.
Информационное обеспечение – это единая система кодирования информации и стандартные интерфейсы между элементами системы.
Типовым техническим решением для построения АСУТП является программно технический комплекс (ПТК), предназначенный для автоматизации технологических процессов определенного профиля. На основе ПТК разрабатываются типовые готовые решения, которые требуют привязки к объекту автоматизации, реконфигурации и настройки оборудования комплекса под конкретный объект. Основные требования, предъявляемые к ПТК и решениям на их основе: стандартизация, типизация, открытость и масштабируемость.
2. Государственная система приборов и средств автоматизации
2.1. Организации по разработке и изданию стандартов
Для обеспечения совместимости компонент системы и качества продукции существуют стандарты, рекомендации и руководящие указания. Стандарты есть «де-юре» и «де-факто». Официальные стандарты выпускаются государственными, межправительственными или общепризнанными организациями производителей:
а) Головная организация по разработке и изданию стандартов ISO – международная организация по стандартизации. ISO объединяет национальные: организации по стандартизации: Госстандарт, ANSI, DIN, BSI и т. д. В состав ISO входят комиссии, занимающиеся вопросами стандартизации в различных областях. Например, подразделение ISO в области электротехники и электроники называется IEC (МЭК – международная экспертная комиссия). Каждая комиссия образует комитеты, подразделения по определенному направлению или кругу вопросов. Так подразделение IEC, регулирующие стандарты в управлении и автоматизации называется - TC65 (Technical commute – Industrial Management and Control).
б) Межправительственной организацией, которая вырабатывает рекомендации и соглашения, в том числе и в сфере управления и автоматизации является ITU-T (Международный союз электросвязи – сектор телекоммуникаций). Ранее эта организация называлась CCITT (МККТТ).В нее в качестве членов входят национальные комитеты всех стран, кроме США.
в) Общепризнанной общественной организацией, занимающейся различными вопросами в области электроники и радиоэлектронике является IEEE (ИИЭР – институт по электронике и радиоэлектронике). Он вырабатывает свои рекомендации, которые после становятся стандартами ANSI.
2.2. Назначение, принципы построения и структура ГСП
Для обеспечения совместимости элементов системы и расширения своего участия на рынке каждая фирма, выпускающая комплекс или отдельные компоненты оборудования обязана учитывать существующие в этой области стандарты.
В СССР в качестве технической основы для создания АСУТП существовала и существует до сих пор Государственная система приборов и средств автоматизации (ГСП), представляющая собой набор рядов унифицированных приборов и устройств измерительной техники, автоматики, телемеханики с единой нормативной базой, включающей унификацию информационных сигналов, метрологических, надежностных, энергетических и других характеристик, необходимого математического обеспечения, конструктивного выполнения. Технические средства ГСП строятся по блочно – модульному принципу с использованием современной технологии изготовления. Устройства ГСП объединяются во взаимосвязанные комплексы технических средств, у каждого из которых свое специфическое назначение и свои области применения. Комплексы имеют метрологическую, информационную, конструктивную и эксплуатационную совместимость.
Все агрегатные комплексы технических средств, входящие в ГСП, разрабатывались с соблюдением ряда государственных общесоюзных стандартов, регламентирующих требования к общим техническим характеристикам (точности, быстродействию, надежности, климатическим условиям работы), нормирующих параметры входных и выходных сигналов, унифицирующих элементы конструкций и т. д.
При создании ГСП цель состояла в том, чтобы создать ограниченную номенклатуру унифицированных устройств, необходимых для построения КТС различного назначения. В основу построения ГСП легли следующие принципы:
- совместимость элементов;
- типизация и минимизация функций;
- минимизация номенклатуры устройств;
- блочно-модульный принцип построения приборов;
- агрегатный способ построения комплексов.
Реализация этих принципов происходила по следующей схеме:
Все приборы были разбиты по функциональному признаку на 4 группы: получение информации о процессе; прием, преобразование и передача по каналам связи; хранение и обработка; использование командной информации и формирование команд управления. Внутри каждой группы определены подгруппы с типичным набором функций. Например, подгруппа датчиков температуры, подгруппа датчиков давления, подгруппа двигателей постоянного тока, подгруппы асинхронных двигателей и т. д. Количество подгрупп не было зафиксировано и постоянно возрастало.
Основой минимизации номенклатуры являлся следующий процесс: сначала происходил отбор основных параметров устройства; затем на основе некоторого принципа устанавливалось число устройств для перекрытия всего диапазона; после этого создавался параметрический ряд устройств; определялось его расширение (модификации и исполнения).
Для построения комплексов использовался агрегатный способ компоновки систем из компонент приборов, на базе стандартизации унификаций и совместимости элементов системы.
Структура технических средств ГСП может быть представлена диаграммой для пяти групп изделий, расположенных на четырех уровнях (рис.7).
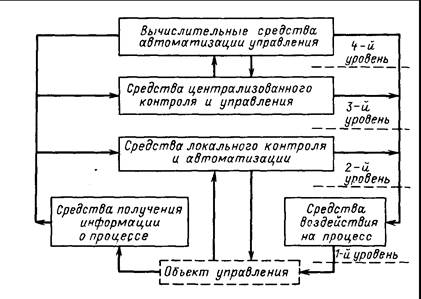
Рис. 7. Структура технических средств ГСП
На нижнем (первом) уровне находятся средства, выполняющие функции получения информации и воздействия на процесс; эти средства непосредственно взаимодействуют с объектом управления. Они обеспечивают информацией все вышерасположенные на схеме устройства и осуществляют передачу управляющих воздействий от любого из них на управляемый объект. Измерение параметров, не связанного со сложными инструментальными методиками, осуществляется с помощью датчиков, конструктивно – технические характеристики которых образуют параметрические ряды. Для проведения измерений, требующих сложных инструментальных методик, применяются устройства, входящие в агрегатные комплексы.
На втором уровне расположены средства для локального контроля и автоматизации, предназначенные для построения одноконтурных систем контроля и регулирования простых объектов или автономного контроля и регулирования отдельных параметров сложных объектов. Эти изделия, как правило, выпускаются в составе параметрических рядов и унифицированных комплексов (УК), создаваемых на основе базовой модели.
На третьем уровне находятся устройства для централизованного контроля и регулирования, которые используются в составе систем, включающих управляющие вычислительные комплексы (УВК). Технические средства этой группы предназначены дня построения автоматизированных систем управления технологическими процессами на объектах, имеющих до нескольких сотен контролируемых и регулируемых параметров. Они позволяют реализовать многосвязное и каскадное регулирование, косвенные измерения, многоступенчатые защиты и логические операции при автоматическом пуске и остановке объекта, перестройку алгоритма управления во время работы, реализацию элементарных математических операций.
На верхнем (четвертом) уровне расположены вычислительные средства автоматизации управления, предназначенные для построения УВК, которые позволяют осуществлять обработку больших массивов информации (от тысяч контролируемых параметров), реализовать сложные алгоритмы управления объектом, в – том числе супервизорное и непосредственное цифровое управления, решение оптимизационных, планово – экономических и учетно-статистических задач.
При конструировании устройств ГСП принят блочно – модульный принцип построения изделий, который заключается в том, что различные функционально более сложные устройства ГСП создаются из ограниченного числа более простых стандартизированных блоков и модулей.
Применение этого принципа при построении изделий ГСП делает приборы универсальными, позволяет использовать при их создании рациональный минимум конструктивных элементов (сокращается номенклатура деталей), обеспечивает взаимозаменяемость приборов в целом и отдельных их узлов. При этом также значительно упрощаются и удешевляются процессы ремонта приборов, которые в большинстве случаев сводятся к замене вышедших из строя типовых узлов и модулей.
Реализация блочно – модульного принципа позволяет создавать новые средства измерения и регулирования из уже существующего отработанного набора узлов и блоков, что дает существенный экономический эффект и ускоряет сроки разработки и внедрения новых изделий,
Номенклатура технических средств ГСП насчитывает в настоящее время свыше 2 тыс. типов изделий, 30% которых составляют датчики различных физических величин и технологических параметров.
По мере наращивания сложности функций действующих систем управления и расширения области их применения, охватывающей новые производства, номенклатура технических средств ГСП – и в первую очередь датчиков – традиционно увеличивалась. Поэтому важнейшей целью совершенствования номенклатуры является ее рациональная минимизация. Одним из основных методов сокращения числа изделий до целесообразного минимума является разработка параметрических рядов изделий на базе системы предпочтительных чисел.
Параметрический ряд – совокупность изделий одинакового функционального назначения, имеющих одни и те же основные параметры, для которых изменение значений главного параметра при переходе от предыдущего числа ряда к последующему подчиняется определенным закономерностям. Первыми параметрическими рядами в ГСП по системе предпочтительных чисел явились ряды унифицированных пневматических и электрических датчиков.
Методика построения параметрического ряда изделий ГСП включает отбор основных параметров приборов и устройств, подлежащих регламентации, выделение главного параметра из их числа и установление наиболее рационального размерного ряда приборов по главному параметру. При этом преимущественно применяются ряды, построенные на основе геометрической прогрессии, с числовыми значениями, соответствующими ГОСТ 8032 – 56 "Предпочтительные числа и ряды предпочтительных чисел". Е10, Е5, Е1.
В настоящее время разработаны параметрические ряды (подчиняющиеся законам геометрической или другой последовательности) преобразователей давления, расхода, уровня, температуры, электроизмерительных приборов.
Известно, что производство и эксплуатация приборов предъявляют противоречивые требования к "плотности" параметрического ряда (количеству типоразмеров в ряду). С одной стороны, увеличение типоразмеров усложняет производство приборов и повышает их стоимость, с другой стороны, уменьшение количества типоразмеров снижает точность систем контроля и автоматизации, увеличивает избыточность применяемых средств. Отсюда возникает задача оптимизации параметрических рядов изделий ГСП.
Основу построения оптимальных параметрических рядов изделий ГСП составляет анализ и учет совокупности технико–экономических данных, таких, как потребность в приборах, зависимость потребности и затрат от основных параметров приборов, зависимость стоимости от серийности и другие факторы. Критерием оптимальности может быть минимум суммарных затрат на удовлетворение заданных потребностей. Этот критерий оптимальности является следствием анализа противоречия между интересами изготовителя (затраты на производство) и потребителя (затраты на эксплуатацию).
При сокращенном ряде приборов у изготовителя уменьшаются затраты на освоение, увеличивается серийность выпускаемых изделий, что обеспечивает значительную экономию материалов. При увеличении "плотности" ряда получается экономия у потребителя за счет более точного соблюдения технологического регламента производственного процесса.
Таким образом, оптимальным параметрическим рядом можно считать ряд одинаковых по функциональному назначению технических средств, упорядоченных по основным параметрам этих средств и оптимальных в смысле принятого критерия. При этом необходимо отметить, что оптимальный параметрический ряд необязательно должен быть рядом, строго подчиняющимся законам геометрической или другой последовательности. Исследования показали, что оптимальные ряды некоторых изделий значительно экономичнее рядов, построенных по системе предпочтительных чисел.
Блочно-модульный принцип построения средств ГСП обеспечивает возможность создания различных функционально сложных устройств из ограниченного числа более простых унифицированных блоков и модулей путем их наращивания и стыковки. Это позволяет создавать новые средства измерения и автоматизации из уже существующего набора узлов и блоков, что дает существенный экономический эффект.
Не менее плодотворным для реализации принципа минимизации номенклатуры изделий и приборов ГСП является метод построения приборов и средств автоматизации в составе агрегатных комплексов (АК).
Изделия АК разрабатываются в виде функционально – параметрических рядов, которые охватывают требуемый диапазон измерений в различных условиях эксплуатации. Благодаря этому исключается необходимость создания других изделий данного функционального назначения, входящих в соответствующий АК.
Унификация конструкций ГСП повышает технологичность изделий в производстве, упрощает их комплектацию, монтаж, наладку и эксплуатацию. Информационная, энергетическая, конструктивная метрологическая совместимость устройств ГСП ускоряет проектирование и изготовление систем автоматического контроля, регулирования и управление в составе оборудования автоматизированного производства
Информационная совместимость – совокупность унифицированных видов и форматов сигналов, их кодирования, единых интерфейсов для взаимодействия устройств в системе.
Конструктивная совместимость. Есть система унифицированных модульных конструкций. все конструкции делятся на категории/уровни так, что элементы низших последовательно монтируются в более высшие, образуя иерархию: элемент, узел, плата, блок, каркас, стойка (шкаф).
Пример: платы EVROCARD (3И1 = 133,35 мм).
Рекомендуемые: 3И1 х N. Стойки формат IS1 = 482,6 мм. IEC S17(25мм) –> 500 мм.
Метрологическая совместимость – должны обеспечивать рациональное построение измерительных цепей и заданные метрологические характеристики.
Эксплуатационная совместимость – работа в одинаковых промышленных условиях, удобство обслуживания, настройки, ремонта. В ГСП предусмотрено несколько видов конструктивного исполнения: нормальное (обычное), пыле-, брызго- и взрывозащитное.
При сопряжении устройств необходимо одновременно учитывать различные виды совместимости, например совместимость по разъемам кабеля включает конструктивную информационную и энергетическую совместимость.
2.3. Ветви и сигналы ГСП
В зависимости от рода используемой энергии СИ и вспомогательные устройства ГСП подразделяют на четыре самостоятельные ветви: электрическую, пневматическую, гидравлическую и не использующей вспомогательной энергии.
Устройства гидравлической ветви применяются тогда, когда нужно обеспечить точное перемещение при больших усилиях, эти приборы - медленные.
Пневматические устройства применяются тогда, когда нужно обеспечить безопасность во взрывоопасных и агрессивных средах. У них сравнительно малая точность и расстояния. Требуется наличие пневмомагистрали.
Электрические – везде, во всех остальных случаях..
Все средства измерений и устройства электрической, пневматической и гидравлической ветви имеют унифицированные входные и выходные сигналы. В ГСП применяют унифицирующие сигналы различных групп, перечень которых приведен в таблице 1:
- электрические непрерывные ток и напряжение,
- электрические непрерывные частотные,
- электрические дискретные,.
- пневматические (70… 100 КПа),
- гидравлические.
Таблица 1. Основные виды унифицированных входных сигналов ГСП
|
Вид сигнала |
Физическая величина |
Параметры сигнала |
|
Электрический |
Постоянный ток |
0-5, 0-20, -5-0-5, 4-20 мА |
|
Постоянное напряжение |
0-10, 0-20 –10-0-10 мВ; 0-10, 0-1 –1-0-1 В |
|
|
Переменное напряжение |
0-2, -1-0-1 В |
|
|
Частота |
2-8, 2-4 кГц |
|
|
Пневматический |
Давление |
0,2-1 кгс/см*см |
|
Гидравлический |
» |
0,1-6,4 МПа |
Связь электрических, пневматических и гидравлических устройств осуществляется с помощью соответствующих преобразователей сигналов. Этим обеспечивается создание комбинированных средств ГСП.
3. Технические средства получения информации о состоянии процесса
3.1. Измерительные устройства ГСП. Сигналы и параметры
ИУ и системы составляют самую многочисленную группу изделий ГСП, составляющую более половины номенклатуры промышленных изделий ГСП. Они обеспечивают получение измерительной информации о физических величинах (параметрах), характеризующих технологические процессы, свойства и качество продукции.
Классификация ИУ ГСП, учитывающая вид входных и выходных сигналов, приведена на рисунке. Под «естественным» входным сигналом в приведенной классификации понимают выходную физическую величину первичного ИП, полученную однократным простым («естественным») преобразованием измеряемой величины и не соответствующую по параметрам унифицированным сигналам. При этом под простым преобразованием понимают только преобразование, используемым для измерения физическим явлением. Несмотря на большое разнообразие величин, виды естественных выходных сигналов ГСП удается ограничить десятью, приведенными на рисунке 8.
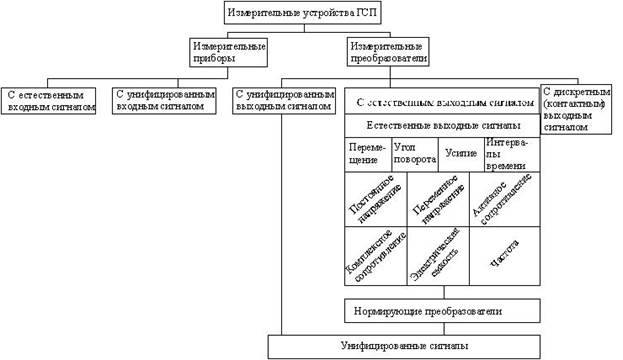
Рис. 8. Классификация СИ ГСП по входным и выходным сигналам
Все измеряемые и управляемые величины ГСП делят на 5 групп: теплоэнергетические, электроэнергетические, механические, физические свойства и химический состав. Каждый измеряемый параметр (их больше 30) имеет свое обозначение: I –сила тока, T – температура, K – число оборотов, Q – расход и т.д.
К устройствам получения информации относят: датчики, измерительные и нормирующие преобразователи и кодеры. В составе ее мы рассматривает и АЦП/ЦАП, так как они часто вместе с указанными элементами составляют единый прибор.
Датчики: подразделяются также на аналоговые, бинарные дискретные и цифровые датчики, выдающие последовательность импульсов или двоичное слово в некотором коде.
Носителем информации может быть один из параметров сигнала: амплитуда, частота, фаза, временные, пространственные соотношения.
Цифровые бинарные датчики имеют два состояния, каждому из которых соответствует свой уровень сигнала, который должен быть преобразован к стандартным значениям «лог. 0» или «лог. 1» для передачи и дальнейшей обработки.
Кодовые датчики (единица измерения - Байт) – выдают цифровой сигнал в одной из систем кодирования: код 2/10 (BCD), код 1248, код Грея, код ASCII, код EBCD1C.
Для преобразования естественного выходного сигнала в унифицированный сигнал в ГСП используются нормирующие преобразователи. Значение нормирования параметров входных и выходных сигналов в ГСП удобно пояснить на примере. Очень широкое распространение получил унифицированный сигнал постоянного тока с диапазоном значений от 0 до 5мА. Если в данном агрегатном комплексе технических средств принят такой сигнал, то это означает, что независимо от вида измеряемого параметра Х и диапазона его значений (Xmin,..., Xmax) ему соответствует на выходе нормализующего преобразователя диапазон сигналов постоянного тока от 0 до 5мА. При этом сигнал не должен изменяться с изменением сопротивления нагрузки на выходе нормализующего преобразователя в диапазоне от 0 до 2,5кОм.
Установив на выходе преобразователя резистор, например с сопротивлением 1кОм, можно привести сигнал к общему диапазону от 0 до 5В и именно на этот диапазон спроектировать АЦП. Нормализующие преобразователи с выходным сигналом в виде унифицированного тока можно размещать довольно далеко от АЦП – на расстоянии до нескольких километров. В этом случае значение сопротивления подводящих проводов не скажется на точности измерения. Лишь при больших расстояниях (свыше 10км) начинают влиять токи утечки между проводами линии. Рис.9.
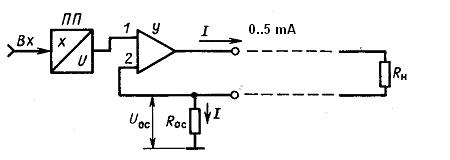
Рис. 9. Датчик с унифицированным выходным сигналам 0.5 mA
3.2. Основные параметры датчиков
Датчик – конструктивно законченный элемент, состоящий из чувствительного элемента и измерительных преобразователей (ИП). С введением унифицированных сигналов в практику приборостроения вошло производство датчиков с унифицированным выходным сигналом. В данном случае датчиком называют объединенные в одном блоке первичный измерительный преобразователь и нормализующий преобразователь. ИП служат для преобразования естественного сигнала чувствительного элемента (первичный преобразователь) в форму, удобную для передачи или обработки. Современные датчики содержат узлы, выполняющие линеаризацию, корректировку и другую обработку сигнала. Пример структурной схемы датчика приведен на рис.10.
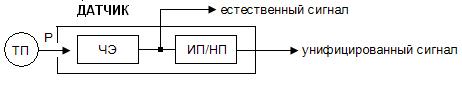
Рис.10. Структурная схема датчика
Основные характеристики датчика: входной параметр, выходной сигнал, статическая характеристика, динамическая характеристика и погрешности, конструктивные характеристики.
3.2.1. Статическая характеристика датчика
Статическая характеристика датчика (вход-выход) отражает функциональную зависимость выходного сигнала от входного параметра в установившемся режиме. Статическая характеристика задается: аналитически, графически, таблично. Рис. 11.
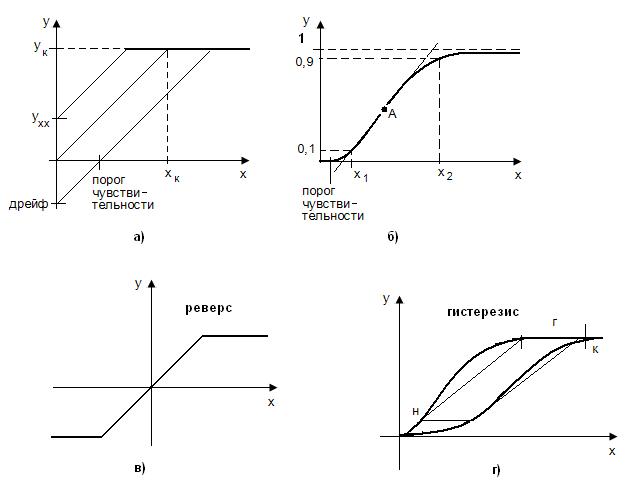
Рис.11. Статические характеристики датчиков:
а) линейные нереверсивные, б) реальные нелинейные, в) реверсивная, г) гистерезисная.
По этой характеристике определяются такие параметры датчика, как чувствительность (коэффициент преобразования), порог чувствительности/разрешения, линейность, величина дрейфа; рабочий/,динамический диапазон, параметры гистерезиса и т. д. Для некоторых типов датчиков (термопары ГСП) установлены номинальные статические характеристики (НСХ) и установлены классы точности в соответствии с процентом отклонений от НСХ.
1) Коэффициент преобразования или коэффициент передачи - это отношение выходной величины элемента Yк к входной величине Xк или отношение приращения выходной величины (![]() =Y2-Y1, dy) к приращению входной величины (
=Y2-Y1, dy) к приращению входной величины (![]() =X2-X1, dx):
=X2-X1, dx):
Cтатический коэффициент преобразования (k, k’).
![]() ,
, ![]() .
.
Значение динамического коэффициента преобразования Кд зависит от выбора рабочей точки.(Рис. 10 б) точка А).
![]()
2) Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает изменение выходной величины. При изменении входной величины X от 0 до порога выходная величина Y не изменяется и равна 0. Рис. 10 а), б).
3) Линейность. Статические характеристики датчика на рабочем участке (в окрестностях точки А) должны быть линейными, отклонение измеряется в %.
4) Дрейф это смещение характеристики при изменении внешних условий по отношению к стандартным. Рис. 10 а).
5) Диапазон измерений – область значений измеряемого сигнала, для которого нормированы измеряемые погрешности. Эта область ограничена пределами измерений наибольшими и наименьшими значениями диапазона измерений. D=Xкз .. Xп, где Xкз - конечное значение шкалы приборов, Xп- порог чувствительности приборов. Диапазон измерений может состоять из нескольких поддиапазонов. Динамический диапазон используют, если диапазон очень велик.
Dd=20*Log(X2/X1)
6) Характеристики многих датчиков имеют гистерезис: сигнал датчика при прямом и обратном ходе отличаются, основной показатель гистерезиса ширина петли. Рис. 10 г).
7) Реле называется элемент автоматики, в котором при достижении входной величины X определенного значения, выходная величина изменяется скачком. Зависимость Y= f(X) является вариантом гистерезиса и имеет форму петли. Рис.11.
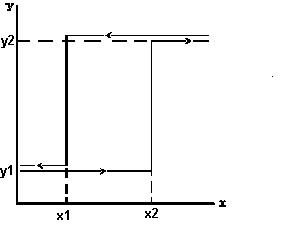
Рис. 12. Характеристика реле
Скачкообразное изменение Y в момент X=X2 называется величиной срабатывания. Скачкообразное изменение Y в момент X=X1 называется величиной отпускания. Отношение величины отпускания X21к величине срабатывания X2 называется коэффициентом возврата ОбычноX2 > X1, поэтому Кв.= Х1/Х2 < 1.
3.2.2. Динамическая характеристика датчика
Динамическая характеристика датчика определяет поведение датчика в переходных режимах. Динамические характеристики определяют зависимость выходного сигнала датчика от меняющихся во времени величин: параметров входного сигнала, внешних факторов, нагрузки. В зависимости от полноты описания динамических свойств СИ различают полные и частные динамические характеристики. К полным динамическим характеристикам относят переходную характеристику, импульсную переходную характеристику, амплитудно-фазовую характеристику, совокупность амплитудно-частотной и фазово-частотной характеристик, передаточную функцию. Частная динамическая характеристика не отражает полностью динамических свойств датчика. Примерами таких характеристик являются время реакции датчика, коэффициент демпфирования, значение резонансной собственной угловой частоты, значение амплитудно-частотной характеристики на резонансной частоте, запаздывание, время нарастания, время установления, время первого максимума, статическая ошибка, полоса пропускания, постоянная времени.
Для датчиков и измерительных преобразователей время реакции – время установления выходного сигнала, определяемое при скачкообразном изменении входного сигнала и заданной погрешности установления выходного сигнала. Динамические свойства СИ определяют динамическую погрешность.
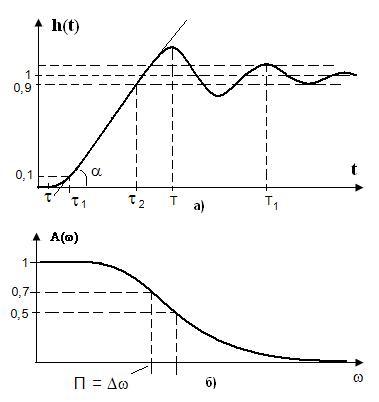
Рис. 13. Динамические характеристики датчика
На рисунке обозначены характеристики:
запаздывание - t;
время нарастания - t2 - t1;
время первого максимума – Т;
время переходного процесса - Т1;
полоса пропускания – П.
3.2.3. Погрешности
При работе датчика выходная величина у отклоняется от необходимого значения за счет внутренних или внешних факторов (износ, старение, колебания напряжения питания, температура и т.д.). Отклонение характеристики называется погрешностью. Погрешности: делятся на основные и дополнительные.
Основная погрешность – максимальная разность между выходным сигналом датчика и его номинальным значением при нормальных условиях эксплуатации.
Дополнительные погрешности – вызываются изменением внешних условий по отношению к норме, нормированные по основному фактору. Выражаются в процентах к изменению вызвавшего фактора. Например: 1% на 5°С.
Основная погрешность может быть абсолютной, относительной и приведенной.
а) Абсолютной погрешностью (ошибкой) называется разность между действительным значением выходной величины ![]() и его номинальным значением– Y:
и его номинальным значением– Y:
![]() .
.
б) Относительной погрешностью называется отношение абсолютной погрешности ![]() к номинальному (желаемому) значению выходной величины Y (обычно выражается в %):
к номинальному (желаемому) значению выходной величины Y (обычно выражается в %):
![]() .
.
в) Приведенной погрешностью называется отношение абсолютной погрешности к нормирующему значению: для преобразователей это наибольшее значение выходной величины, для приборов максимальное значение шкалы. Величина этой погрешности определяет класс точности прибора 0,1; 0,5; 1.0 и т.д.
 .
.
Погрешности СИ могут иметь систематические и случайные составляющие. Случайные составляющие приводят к неоднозначности состояний. Поэтому случайные составляющие погрешности СИ стараются сделать незначительными по сравнению с другими составляющими.
Систематические погрешности измерения - это составляющие погрешности, которые остаются постоянными и закономерно изменяются при повторных измерениях одной и той же величины. К постоянным систематическим погрешностям относят погрешность градуировки шкалы, температурная погрешность и т.д. К переменным систематическим погрешностям относят погрешность, обусловленную нестабильностью источника питания. Систематические погрешности исключают путем калибровки или введения поправок (смещения).
Случайные погрешности измерений – это составляющие погрешности измерения, изменяющиеся случайным образом при повторных измерениях одной и той же величины. Значение и знак случайной погрешности определить невозможно, т. к. случайные погрешности обязаны своим происхождением причинам, действия которых не одинаково в каждом эксперименте и не может быть учтено.
Обнаруживаются случайные погрешности при многократных измерениях одной и той же величины, следовательно, их влияние на результат измерений учитывается методами математической статистики и теории вероятности. Рис. 14.
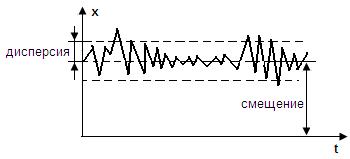
Рис. 14. Систематическая и случайная составляющие погрешности
3.3. Структурные схемы ИП и их погрешности
В ГСП, несмотря на значительное разнообразие измеряемых величин и используемых для этого принципов измерений, применяются четыре структурные схемы измерительных устройств, а именно: схема прямого однократного преобразования, схема последовательного прямого преобразования, схема прямого дифференциального преобразования, схема управляющего преобразования (часто называется компенсационной).
Структура однократного прямого преобразования реализуется в ИП с естественными выходными сигналами, например в термоэлектрических преобразователях, датчиках давления и перепада давления. Если первичное преобразование измеряемой величины не дает удобного для использования сигнала, применяют структуры с несколькими последовательными ИП.
Дифференциальная структура в ИП применяется тогда, когда измерение основывается на сопоставлении результатов преобразования измерительной информации, полученной в реальных и в некоторых эталонных условиях. Преимущество этой структуры по сравнению с предыдущими состоит в значительном уменьшении погрешности, обусловленной изменением параметров источника питания и окружающей среды.
Наиболее совершенной является структура с отрицательной обратной связью, получившая название компенсационной схемы. Достоинство схемы - компенсация изменений параметров измерительного тракта вследствие того, что выходной сигнал непрерывно сравнивается с измеряемой величиной. Отрицательная обратная связь существенно снижает влияние погрешности звеньев прямого канала на результат преобразования.
Измерительные устройства в этих структурах состоят из некоторого числа элементов, организованных в измерительную цепь.
Преобразовательный элемент – элемент системы измерений (СИ), в котором происходит одно из ряда последовательных преобразований величины;
Чувствительный элемент – первый элемент в измерительной цепи. Преобразовательный элемент, находящийся под непосредственны воздействием измеряемой величины;
Измерительный механизм – часть конструкции СИ, состоящий из элементов, взаимодействие которых вызывает из взаимное перемещение
Отсчетное устройство – часть конструкции СИ, предназначенное для регистрации показаний.
Регистрирующее устройство – часть регистрирующего измерительного прибора, предназначенная для регистрации показаний.
На рисунке ниже приведены схемы измерительных устройств прямого действия (прямого преобразования) и уравновешивающего или компенсационного преобразования.
 а)
а)

Рис. 15. Структурные схемы СИ прямого действия
Работа СИ прямого действия. На рисунке 15а измеряемая физическая величина Х поступает в чувствительный элемент 1, где преобразуется в другую величину, удобную для дальнейшего использования (ток, напряжение, давление, перемещение, сила), и поступает на промежуточный преобразовательный элемент 2, который обычно либо усиливает поступающий сигнал, либо преобразует его по форме. (Элемент 2 может отсутствовать). Выходной сигнал элемента 2 поступает к измерительному механизму 3, перемещение элементов которого определяется с помощью отсчетного устройства 4. Выходной сигнал Y (показание), формируемый измерительным прибором, может быть воспринят органами чувств человека.
На рисунке 15б приведена структурная схемы измерительного преобразователя, у которого отсутствует измерительный механизм и отсчетное устройство. Этим определяется тот факт, что сигнал измерительных преобразователей имеет форму, недоступную для восприятия человеком. В то же время в составе таких измерительных преобразователей, как правило, имеется оконченный преобразовательный элемент 7, который формирует выходной сигнал (усиливает его по мощности, преобразует в частоту колебаний и т.д.) таким образом, что его можно передавать на расстояние, хранить и обрабатывать.
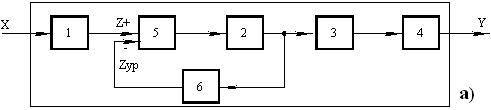
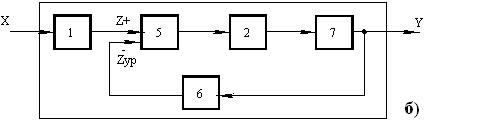
Рис. 16. Структурные схемы СИ сравнения
Схема измерительного прибора, основанного на методе уравновешивающего преобразования, показана на рисунке 16а. Отличительной особенностью таких приборов является наличие отрицательной обратной связи. Здесь сигнал Z, возникающий на выходе чувствительного элемента, поступает на преобразовательный элемент 5, который способен осуществлять сравнение двух величин (элемент сравнения, компаратор), поступающих на его вход. Кроме величины Z на выход элемента 5 подается величина с противоположным знаком Zур (уравновешивающий сигнал), которая формируется на выходе обратного преобразовательного элемента 6. На выходе элемента 5 формируется сигнал, пропорциональный разности значения величин Z и Zур. Этот сигнал поступает в промежуточный преобразовательный элемент 2, выходной сигнал которого поступает одновременно на измерительный механизм 3 и на вход обратного преобразовательного элемента 6. В зависимости от типа промежуточного преобразовательного элемента 2 при каждом значении измеряемого параметра и соответствующем ему значении Z разность Z-Zур, поступающая на вход элемента 5, может сводиться к нулю или иметь некоторое малое значение, пропорциональное измеряемой величине.
На рисунке 16б приведена структурная схема уравновешивающего измерительного преобразователя
Погрешности ИП
Прямое преобразование.
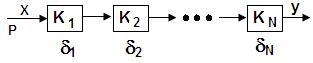
Рис. 17. Схема прямого преобразования
На рисунке обозначены: Р – измеряемая величина; Х – ее значение; Y – выходной сигнал преобразователя; Кi – коэффициенты усиления элементов; dI – погрешности элементов.
![]()
![]() ;
; ![]()
Дифференциальная схема.
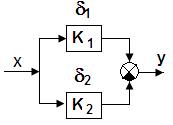
Рис. 18. Дифференциальная схема
![]() ;
; ![]()
Достоинства этой структуры:
- уменьшение Dсист;
- увеличение чувствительности и снижение нелинейности
- получение реверсивной характеристики.
3. Компенсационная схема.
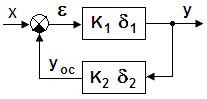
Рис. 19. Компенсационная схема
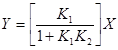 ;
; ![]() при
при ![]() ;
; ![]() .
.
Достоинства этой структуры:
- увеличение чувствительности и точности;
- стабильность коэффициента преобразования;
- компенсация погрешностей,
- высокое входное сопротивление, что приводит к уменьшению нагрузки на датчик.
4. Измерительные преобразователи
4.1. Классификация ИП
Измерительные преобразователи можно делить на группы по различным классификационным признакам.
1. По виду выходных сигналов. Рис. 8.(ГОСТ, ГСП).
2. В зависимости от вида контролируемой неэлектрической величины датчики делятся на группы:
а) датчики механических величин;
б) датчики тепловых величин;
в) датчики оптических величин и т.д.
Преобразование осуществляется по схеме: измеряемая величина - механическое перемещение - электрическая величина.
3. По физическому явлению, на котором основана работа чувствительного элемента. В зависимости от принципа преобразования датчики делятся на две группы:
а) параметрические или пассивные датчики, в которых изменение контролируемой величины Х сопровождается изменением сопротивления датчика (активного, индуктивного, емкостного). При этом наличие постороннего источника энергии является обязательным условием работы параметрического датчика.
б) генераторные или активные датчики, в которых изменение контролируемой величины Х сопровождается изменением ЭДС на выходе датчика, возникновение ЭДС может происходить за счет термоэлектричества, пьезоэффекта и т.д.
Генераторные датчики не требуют дополнительного источника энергии, поэтому мощность выходного сигнала всегда меньше мощности входного сигнала.
Таблица 2. Классификация датчиков
|
Параметрические |
Генераторные |
|
Потенциометрические (R – V) Тензорезистивные (R – V) Индуктивные (wL – V) Емкостные (1/wC – V) Фотоэлектрические (F– V) Кодовые |
Термоэлектронные (T – V) Пьезоэлектрические (P – V) Индукционные( L – V) Трансформаторные (В – V) Фотоэлектрические (F– V) Радиационные |
Датчики осуществляют первичное преобразование физико-химической величины, как правило, в какой-либо электрический параметр: напряжение, ток, сопротивление, емкость, индуктивность. Поэтому датчики еще называют первичными преобразователями. Дальнейшее измерение электрических параметров осуществляется хорошо известными стандартными методами.
4.2. Резистивные ИП
Потенциометрические ИП преобразуют механические перемещения в изменения сопротивления реостата. По назначению датчики бывают линейных и угловых перемещений. Потенциометрический датчик представляет собой реостат, включённый по схеме потенциометра. При перемещении подвижного контакта под воздействием контролируемой величины Х происходит изменение сопротивления датчика. В зависимости от закона изменения сопротивления различают линейные и функциональные потенциометры, а в зависимости от схемы включения полярные и реверсивные.
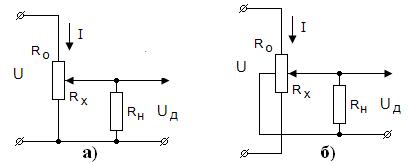
Рис. 20. Потенциометрические датчики: а) полярный, б) реверсивный
Выведем основные соотношения для линейного потенциометра. Введем обозначения R0 полное сопротивление потенциометра, Rx сопротивление при заданном положении движка, Rн сопротивление нагрузки; тогда для перемещения движка Х , для коэффициента нагрузки a, имеем:
![]() ;
; ![]() ;
;
Напряжение на выходе потенциометра (Ud) определится по формуле: Рис. 22.
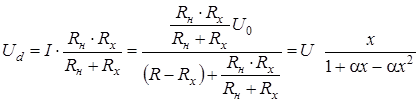
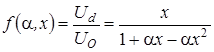
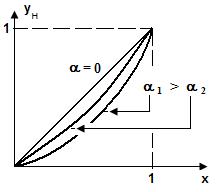
Рис. 21. Характеристика потенциометрического датчика
Если ![]() , то
, то ![]() , при этом током в нагрузке можно пренебречь и
, при этом током в нагрузке можно пренебречь и ![]() становится линейной:
становится линейной:
Если ![]() не соблюдается, то необходимо либо учитывать погрешность, вызванную нелинейностью характеристики, либо рабочий участок необходимо ограничить. Погрешность от несогласованности сопротивлений потенциометра и нагрузки растет при увеличении коэффициента нагрузки, причем при малых перемещениях движка она незначительна. У проволочного потенциометра есть ошибка из-за ступенчатости его характеристики.
не соблюдается, то необходимо либо учитывать погрешность, вызванную нелинейностью характеристики, либо рабочий участок необходимо ограничить. Погрешность от несогласованности сопротивлений потенциометра и нагрузки растет при увеличении коэффициента нагрузки, причем при малых перемещениях движка она незначительна. У проволочного потенциометра есть ошибка из-за ступенчатости его характеристики.
Наибольшее значение погрешность линейного потенциометра имеет при нахождении движка в среднем положении, т.е. при X=L/2.
![]()
Передаточная функция потенциометрического датчика на низких а) и на высоких б) частотах:
Достоинства потенциометрических датчиков: простота конструкции, возможность получения достаточно прямолинейной характеристики, стабильность характеристик, значительная величина выходного сигнала.
Недостатки: пониженная надежность, износ, контактное сопротивление, относительно большие перемещения и малая скорость движка, дискретность.
4.3. Тензорезистивные датчики
Для изменения усилий и деформаций в деталях и конструкциях различных устройств применяются тензометрические или тензорезистивные датчики. Тензоэффект – изменение активного сопротивления проводников при механической деформации материала. Величина тензоэффекта зависит от ориентации силы и вида материала.
Тензочувствительность КТ - это отношение величины относительного изменения его сопротивления к относительному изменению линейного размера проволоки:
![]()
где R - сопротивление провода, l - начальная длина деформируемого участка провода, ![]() - характеризует собой изменение геометрических размеров, μ - коэффициент Пуассона,
- характеризует собой изменение геометрических размеров, μ - коэффициент Пуассона, ![]() - коэффициент изменения удельного сопротивления материала с изменением его геометрических размеров.
- коэффициент изменения удельного сопротивления материала с изменением его геометрических размеров.
Типы тензорезистивных датчиков: проволочные, фольговые, пленочные и полупроводниковые (тензолиты).
Проволочные тензометрические датчики
Проволочные тензодатчики основаны на изменении сопротивления константановой проволоки диаметром 0,01 - 0,05 мм, сложенной в виде петлеобразной решетки между склеенными полосками тонкой бумаги. Сам датчик приклеивается к детали, деформацию которой нужно измерить. Изменение сопротивления датчика происходит при растяжении или сжатии, а также при изменении удельного сопротивления проволоки под влиянием механических напряжений. Для проволочных тензодатчиков выполненных из константановой проволоки m=2, R=2000 Ом, деформация не более 0,3%, база - 5-30 мм, максимальная температура 500°С. Фольговые тензодатчики изготавливаются из тонких полосок фольги толщиной 4-12 микрон, методом фототравления, и могут иметь произвольную форму решетки у, например розетку. Рабочий ток 200 мА, сопротивление R 30-250 Ом. У них высокая теплоотдача и высокая восприимчивость к деформации.
Достоинства тензодатчиков: простота конструкции, отсутствие гистерезиса, безинерционность, стабильность.
Недостатки: малая чувствительность температурная погрешность.
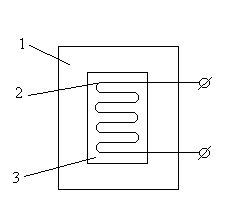
Рис. 22. Проволочный тензометрический датчик: 1 - деталь, 2 - бумага, 3 - константановая проволока
Полупроводниковые тензодатчики представляют собой пластины, различной формы, к которым присоединены металлические выводы и которые наклеены на поверхность детали. Они выполняются из тензолитных или кристаллических полупроводниковых материалов.
Достоинства: высокая тензочувствительность, компактность, малая погрешность (до 0,1%), быстродействие, большой срок службы.
Недостатки: ограниченный температурный диапазон без внешней компенсации, наличие гистерезиса, хрупкость.
Для компенсации нелинейности используют мостовую схему, в которой для термокомпенсации используют в одном из плеч моста параллельный терморезистор с другим ТКС по знаку. Рис.23. Область применения тензодатчиков: измерение сосредоточенных сил, моментов и т. д., измерение давлений, измерение ускорения. Особенно распространены датчики давления с термокомпенсацией, выполненные по технологии «кремний на сапфире».
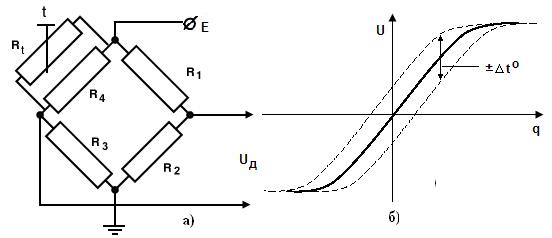
Рис. 23. Мостовой тензорезистивный датчик: а) – схема, б) – характеристика
4.4. Терморезистивные датчики
Терморезистивные датчики (термосопротивления) обладают свойством изменять свое электрическое сопротивление при изменении температуры. Они, применяются для измерения неэлектрических величин (температуры, скорости, концентрации, плотности вакуума и т.п.), характеризующих газовую или жидкую среду, в диапазоне температур от -250 до + 1000°С. Терморезисторы изготавливаются из металлов и полупроводников.
1. Металлические термосопротивления являются чувствительными элементами в термометрах сопротивлений. Они изготавливаются из меди, платины, железа, никеля. Сплавы металлов не применяются, так как при добавлении в чистый металл примеси нарушается стабильность характеристики, уменьшается температурный коэффициент сопротивления, характеризующий чувствительность терморезистора к изменениям температуры.
Качество терморезистора характеризуется его чувствительностью к изменению температуры и определяется температурным коэффициентом сопротивления α, представляющий собой относительное изменение сопротивления ∆R/R на единицу приращения температуры ∆t:
Зависимость сопротивления от температуры ![]() , при малом b
, при малом b ![]() .
.
Материалы терморезисторов должны иметь большой и постоянный температурный коэффициент сопротивления, большое удельное сопротивление. Их физические и химические свойства должны быть устойчивы при высоких температурах.
Лучший материал для изготовления металлических терморезисторов - платина, из которой изготавливают как технические, так и образцовые и эталонные датчики, пригодные для измерения температур в диапазоне от -200 до +500°С. Функция преобразования платинового терморезистора нелинейная и обычно аппроксимируется квадратичным трехчленом. Параметры: a = 4 × 103 К-1, b = 6 × 10-7 К-2.
Функция преобразования медного терморезистора линейна и a = 4,3 × 10-3 К-1. Медные терморезисторы применяют в диапазоне температур от -50 до +150°С. Основные параметры наиболее распространенных терморезисторов и обозначения их градуировок по ГОСТ 6651-84 приведены в табл. 3.
Таблица 3
|
Термометры сопротивления платиновые |
Термометры сопротивления медные |
|||||
|
Сопротивление при 0С(R0) |
Градуир. |
Диапазон измерения, 0С |
Сопротивление при 0С(R0) |
Градуир. |
Диапазон измерения, 0С |
|
|
10 50 100
|
10П 50П 100П |
От –200 до +750 От –260 до +1000 От +260 до +1000 |
10 50 100 |
10М 50М 100М |
От –50 до 200 От –50 до 200 От –200 до 200 |
|
Конструкция термометра сопротивления приведена на рис. 24.
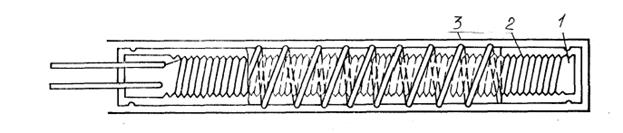
Рис. 24. Конструкция термометра сопротивления
Термометр сопротивления имеет чувствительный элемент в виде тонкой проволоки 2 (диаметр 0,05 мм), намотанный на каркас 1(пластину из слюды) и помещенный в защитный чехол 3. Используются три или четыре провода для компенсации температурных колебаний окружающей среды. Номинальные функции преобразования (статические характеристики) медных и платиновых терморезисторов и их погрешность определяются ГОСТ 6651-84.
Железные и никелевые терморезисторы занимают промежуточное место, как более дешевые, чем платина и более стойкие, чем медь. Они работают в диапазоне температур от +100 до +150°С.
Достоинства термометров сопротивления: стабильность, линейность, большой диапазон, дешевизна (медь).
Недостатки: большие габариты, большая инерционность, малая величина R, окисляемость(медь.
2. Полупроводниковые терморезисторы (термисторы).
Термисторы изготавливаются из смеси окислов различных металлов (например, CuO, CoO, MnO),. величина электрического сопротивления термистора резко уменьшается при увеличении температуры Чувствительность терморезисторов к изменению температуры значительно выше, чем у металлических. Так при повышении температуры от 0 до +100°С сопротивление меди увеличивается всего на 43%, а у термисторов сопротивление RQ уменьшается в 20-70 раз, в зависимости от величины его температурного коэффициента сопротивления. ![]()
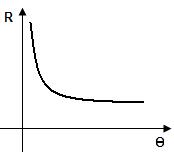
Рис. 25. Характеристика термистора
Температурный коэффициент сопротивления термистора ![]() примерно в 6-10 раз больше, чем у металлических терморезисторов, для термисторов .
примерно в 6-10 раз больше, чем у металлических терморезисторов, для термисторов .![]() . Некоторые типы термисторов работают в диапазоне температур от -100 до +500° С0 и выше. Термисторы находят широкое применение для компенсации температурных погрешностей в измерительных схемах, и в качестве датчиков для измерения различных неэлектрических величин, влияющих на отвод тепла от терморезистора Рис. 26.
. Некоторые типы термисторов работают в диапазоне температур от -100 до +500° С0 и выше. Термисторы находят широкое применение для компенсации температурных погрешностей в измерительных схемах, и в качестве датчиков для измерения различных неэлектрических величин, влияющих на отвод тепла от терморезистора Рис. 26.
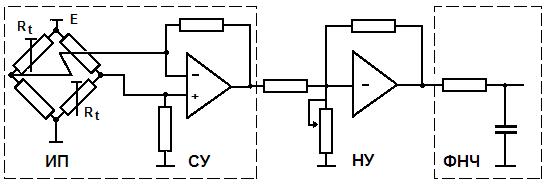
Рис. 26. Схема измерения на основе термистора
Конструктивно термисторы изготавливаются в виде маленьких стерженьков (длиной 12 мм и диаметром 1,8мм), шайб, дисков и бусинок.
Достоинства: намного больше ТКС, намного меньше размер и инерционность, возможность работы в релейном режиме.
Недостатки: более узкий рабочий диапазон, нелинейность, большой разброс значений.
4.5. Термоэлектронный преобразователь (термопара)
Если два разных металла соединить концами и поместить места их спаев в среды с разными температурами, то в контуре из этих проводников возникает ЭДС (термоЭДС). Это эффект Зеебека.
Цепь, составленная из двух разнородных металлов, называется термопарой, а ЭДС, возникающая при нагреве спая называется термоэлектродвижущей силой. Проводники - это термоэлектроды, стыки - спай. Спай температура которого, поддерживается постоянной, называется холодным, а спай, соприкасающийся с измеряемой средой, - горячим. По величине термоЭДС можно судить о разности температур ![]()
![]()
![]()
При этом если известна температура холодного спая ![]() , то можно определить температуру горячего спая
, то можно определить температуру горячего спая ![]() :
:
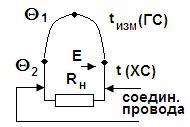
Рис. 27. Термопара
В табл.4 приведены наиболее широко используемые термопары (ГОСТ 6616-84) и их основные характеристики (ГОСТ 3044-84). Маркировка ХА, ХК, ПП, ПР,ВР; на Западе – А, S, K, N, H.
Таблица 4
|
Тип термопары |
Материал термоэлектродов |
Обозначение градуировки |
Диапазон измерения при длительном измерении, 0С |
|
ТХК ТХА ТПП ТВР |
Хромель-копель Хромель-алюмель Платинородий (10%) – платина Вольфрамрений (5%) - вольфрамрений (20%) |
ХК (L) ХА (К) ПП (S) ВР (А) |
-200…+600 -200…+1000 0…+1300 0…2200 |
Чувствительность термопар различна и лежит в диапазоне от 10 мкВ/0°C (ПП) до 70 мкВ/0°C(ХК). Напряжение до 100мВ называется малым. Малые напряжения требуют специальных схем подключения усиления и коррекции (не взрывоопасны).
Номинальная функция преобразования термопар со стандартной градуировкой задается градуировочной таблицей. Она определяет зависимость ЭДС E(t,t0) термопары от изменяемой температуры t при температуре свободных спаев t0=0 0С. Одним из источников погрешности термопары является несоответствие температуры свободных концов термопары температуре, при которой была произведена градуировка. Если в условиях измерения температура свободных спаев t\0 не равна температуре t0, то ЭДС термопары E(t,t\0) отличаются от ЭДС E(t,t0), которая нужна для определения температуры по стандартной градуировке. и необходимо введение поправки.
Погрешность стандартных термопар d = 0,1..0,2%.
Передаточная функция термопары:
![]() .
.
Достоинства: большой диапазон, стабильность, надежность.
Недостатки: табличная градуировка, слабый сигнал и низкая чувствительность, большая инерционность, необходимость фиксации температуры холодного спая.
4.6. Бесконтактное измерение температуры
О температуре нагретого тела можно судить на основании измерения параметров его теплового излучения, представляющего собой электромагнитные волны различной длины. Термометры, действие которых основано на измерении теплового излучения, называют пирометрами. Они позволяют контролировать температуру от 100 до 6000 0С и выше. Одним из главных достоинств данных устройств является отсутствие влияния измерителя на температурное поле нагретого тела, так как в процессе измерения они не вступают в непосредственный контакт друг с другом. Поэтому данные методы получили название бесконтактных. Спектр нагретого тела имеет выраженный максимум, где lmax подчиняется закону Стефана-Больцмана. ![]() Рис. 28.
Рис. 28.
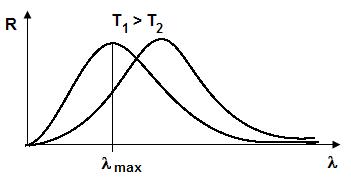
Рис. 28. Спектр нагретого тела
Различаются радиационная, яркостная, цветовая температуры. Радиационной температурой реального тела Тр называют температуру, при которой полная мощность абсолютно черного тела (АЧТ) равна полной энергии излучения данного тела при действительной температуре Тд.
Яркостной температурой реального тела Тя называют температуру, при которой плотность потока спектрального излучения АЧТ равна плотности потока спектрального излучения реального тела для той же длины волны (или узкого интервала спектра) при действительной температуре Тд.
Цветовой температурой реального тела Тц называют температуру, при которой отношения плотностей потоков излучения АЧТ для двух длин волн ![]() и
и ![]() равно отношению плотностей потоков излучений реального тела для тех же длин волн при действительной температуре Тд.
равно отношению плотностей потоков излучений реального тела для тех же длин волн при действительной температуре Тд.
На основании законов излучения разработаны пирометры следующих типов:
- пирометр суммарного излучения (ПСИ) – измеряется полная энергия излучения;
- пирометр частичного излучения (ПЧИ) – измеряется энергия в ограниченном фильтром (или приемником) участке спектра;
- пирометры спектрального отношения (ПСО) – измеряется отношение энергии фиксированных участков спектра.
Пирометры частичного излучения. К данному типу пирометров, измеряющих яркостную температуру объекта, относятся монохроматические оптические пирометры и фотоэлектрические пирометры, измеряющие энергию потока в узком диапазоне длин волн. Принцип действия оптического пирометра с "исчезающей" нитью основан на сравнении яркости объекта измерения и градуированного источника излучения в определенной длине волны.
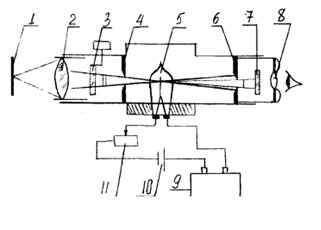
Рис. 29. Яркостной оптический пирометр
Изображения излучателя 1 линзой 2 и диафрагмой 4 объектива пирометра фокусируется в плоскости нити накаливания лампы 5. Оператор через диафрагму 6 линзу 8 окуляра и красный светофильтр 7 на фоне раскаленного тела видит нить лампы. Перемещая движок реостата 11, оператор изменяет силу тока, проходящего через лампу, и добивается уравнивания яркости нити и яркости излучателя. Если яркость нити меньше яркости тела, то она на его фоне выглядит черной полоской, при большей температуре нити она будет выглядеть, как светлая дуга на более темном фоне. При равенстве яркости излучателя и нити последняя "исчезает" из поя зрения оператора. Этот момент свидетельствует о равенстве яркостных температур объекта измерения и нити лампы. Питание лампы осуществляется с помощью батареи 10. Прибор 9, фиксирующий силу тока, протекающего в измерительной цепи, заранее проградуирован в значениях зависимости между силой тока и яркостной температурой АЧТ, что позволяет производить считывание результата в 0С.
Данный тип пирометров позволяет измерять температуру от 700 до 8000 0С. Для оптических пирометров промышленного применения в интервале температур 1200 - 2000 0С основная допустимая погрешность измерения составляет ±20 0С. На точность измерения влияют неопределенность и изменяемость спектральной степени черноты, возможное изменение интенсивности излучения за счет ослабления в промежуточной среде, а так же за счет отражения посторонних лучей.
Пирометры спектрального отношения измеряют цветовую температуру объекта по отношению интенсивностей излучения в двух определенных участках спектра, каждая из которых характеризуется эффективной длиной волны ![]() ,
, ![]() . ПСО используются для измерения температур твердого и расплавленного металла в широком интервале температур от 300 до 2200 0С и имеют класс точности 1 и 1.5 (в зависимости от предела измерения). Данные пирометры имеют в 3-5 раз меньшую методическую погрешность, связанную с изменением степени черноты излучателя. На их показания значительно меньше влияют поглощения промежуточной среды. Однако в тех случаях, когда объект характеризуется селективным излучением (степень черноты при одной и той же температуре резко изменяется с длиной волны), погрешность ПСО может быть выше погрешности пирометров излучения других типов. ПСО более сложны и менее надежны, чем другие приборы
. ПСО используются для измерения температур твердого и расплавленного металла в широком интервале температур от 300 до 2200 0С и имеют класс точности 1 и 1.5 (в зависимости от предела измерения). Данные пирометры имеют в 3-5 раз меньшую методическую погрешность, связанную с изменением степени черноты излучателя. На их показания значительно меньше влияют поглощения промежуточной среды. Однако в тех случаях, когда объект характеризуется селективным излучением (степень черноты при одной и той же температуре резко изменяется с длиной волны), погрешность ПСО может быть выше погрешности пирометров излучения других типов. ПСО более сложны и менее надежны, чем другие приборы
Фотоэлектрические пирометры частичного излучение обеспечивают непрерывное автоматическое измерения и регистрацию температуры. Их принцип действия основан на использовании зависимости интенсивности излучения от температуры в узком интервале длин волн спектра. В качестве приемников в данных устройствах используются фотодиоды, фотосопротивления, фотоэлементы и фотоумножители. Эти пирометры, содержат стабильный источник излучения, при чем фотоприемник служит лишь индикатором равенства яркостей данного источника и объекта. В фотоэлектрических пирометрах с пределами измерения от 500 до 1100 0С применяют кислородно-цезиевый фотоэлемент, а в приборах со шкалой 800 - 4000 0С вакуумный сурьмяно-цезиевый
Пирометры суммарного излучения измеряют радиационную температуру тела, поэтому их часто называют радиационными. Принцип действия данных измерителей температуры основан на использовании закона Стефана-Больцмана. Однако в случае применения оптических систем в ПСИ определение температуры ведется по плотности интегрального излучения не во всем интервале длин волн, а значительно меньшем: для стекла рабочий спектральный диапазон составляет 0.4 - 2.5, а для плавленого кварца 0.4 - 4 мкм.
Датчик пирометра выполняется в виде телескопа, линза объектива которого фокусируется на термочувствительном приемнике излучения нагретого тела. В качестве термочувствительного элемента используются термопары, термобатареи, болометры (металлические и полупроводниковые), биметаллические спирали и т. п.
Рабочие концы термопар поглощают падающую энергию и нагреваются. Свободные концы находятся вне зоны потока излучения и имеют температуру корпуса телескопа. В результате возникновения перепада температур термобатарея развивает термо-ЭДС, пропорциональную температуре рабочих спаев, а следовательно, и температуре объекта измерения. Градуировка пирометров производится при температуре корпуса 20±2 0С, поэтому повышение данной температуры приводит к уменьшению перепада температур в термопарах приемника излучения и к появлению значительных дополнительных погрешностей. Так, при температуре корпуса 40 0С дополнительная погрешность (при прочих равных условиях) составит ±4 0С.
Вид материала линзы определяет интервал измеряемых температур и градуировочную характеристику. Стекло из флюорита обеспечивает возможность измерения низких температур начиная с 100 0С, кварцевое стекло используется для температуры 400 - 1500 0С, а оптическое стекло для температур 950 0С и выше.
ПСИ измеряют температуру от 100 до 3500 0С. Основная допустимая погрешность технических промышленных пирометров возрастает с увеличением верхнего предела измерения и для температур 1000, 2000 и 3000 0С составляет соответственно ±12; ±20 и ±35 0С
4.7. Емкостные датчики
Емкостные датчики относятся к датчикам параметрического типа, в которых изменение контролируемой величины вызывает изменение емкостного сопротивления датчика. Емкость конденсатора зависит от формы и геометрических размеров электродов, от диэлектрической проницаемости и от расстояния между обкладками. В различных датчиках может меняться один из указанных параметров. При помощи емкостных датчиков измеряют геометрические размеры изделий, влажность изоляционных материалов и определяют состав изоляционного материала. Они получили распространение также в телемеханике - для преобразования механического перемещения в изменение электрической емкости конденсатора.
Чаще всего емкостной датчик представляет собой плоский конденсатор, состоящий из двух или более пластин, между которыми помещается диэлектрик.
Емкость плоскопараллельного конденсатора равна:
![]() ,
,
где εо - абсолютная диэлектрическая проницаемость вакуума, (εо= 8,85*10-12 ф/м);
εr - относительная диэлектрическая проницаемость между обкладками;
S - площадь перекрытия обеих пластин, см2;
d - зазор между пластинами, мм.
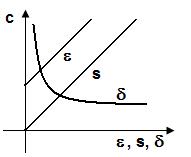
Рис. 30. Зависимость емкости конденсатора от его параметров
Каждую из величин можно принять за входную (остальные параметры остаются постоянными) и получить соответствующий тип датчика с переменной емкостью на выходе.
Достоинства емкостных датчиков: высокая чувствительность, малый вес и габариты простота конструкции.
Недостатки: необходимость усиления снимаемого сигнала, необходимость тщательной экранировки датчика, применение высокочастотного источника.
Применение емкостных датчиков:
1) измерение малых перемещений;
2) контроль угловых перемещений;
3) передача показаний стрелочных измерительных приборов;
4) использование в качестве топливомеров;
5) измерений толщины материалов;
6) измерение уровней жидкостей;
7) измерение скоростей;
8) измерение давлений
Датчик угловых перемещений применяется для преобразования угловых перемещений в изменение емкости. Рис 31. Рабочая площадь (заштрихованная) зависит от утла поворота a подвижной пластины 1. Для увеличения емкости применяется несколько пластин.
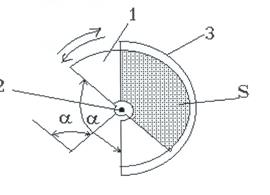
Рис. 31. Датчик угловых перемещений. 1, 3 - пластины; 2 – вал.
Датчик для измерения уровня жидкости используются в качестве емкостного топливомера, с помощью которого можно измерить уровни токопроводящих жидкостей (керосина, бензола, масла и др.), причем датчиком топливомера может служить цилиндрический или плоский конденсатор, помещаемый внутрь топливного бака. Рис 32.
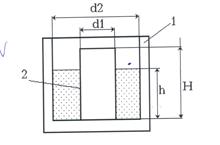
Рис. 32. Датчик для измерения уровня жидкости: 1 - резервуар; 2 - электрод
Датчик для измерения перемещения показан на рис. 33.
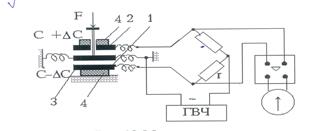
Рис. 33. Мостовая схема для измерения перемещения
При отсутствии механического воздействия F обкладка 1 занимает симметричное положение, при этом емкости двух половин конденсатора С1-3 и С1-4 одинаковы и равны С. При воздействии измеряемой неэлектрической величины (механической) F обкладка 1 перемещается, а емкости верхней и нижней частей датчика получают приращение с разными знаками: С1-3=С+ΔС и С1-4=С-ΔС.
4.8. Индуктивные датчики
4.8.1. Индуктивный датчик на дросселе
Индуктивные датчики относятся к классу параметрических. Индуктивные датчики основаны на изменении индуктивного сопротивления электромагнитного дросселя при перемещении одной из подвижных частей (обычно якоря). Их применяют для измерения малых угловых и линейных перемещений.
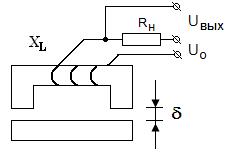
Рис. 34. Схема индуктивного датчика для измерения перемещения
Индуктивный датчик на рисунке представляет собой дроссель с переменным воздушным зазором между якорем и сердечником, на котором расположена обмотка, включенная последовательно с нагрузкой Rн. Такой датчик имеет высокую чувствительность и реагирует на изменение зазора d в диапазоне 0,1-0,5 мкм. При измерении больших перемещений используют датчики с переменной площадью зазара или разомкнутой магнитной цепью.
При малом зазоре рассеяние мало, поэтому ![]() отсюда индуктивного сопротивления дросселя -
отсюда индуктивного сопротивления дросселя - ![]() для дросселя выполняется соотношение
для дросселя выполняется соотношение ![]() .
.
Выходное напряжение датчика:

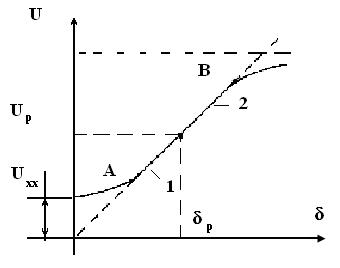
Рис. 35. Характеристика индуктивного датчика
На рис. 35 показана статическая характеристика датчика. ![]() - рабочий участок. Особенности характеристики:
- рабочий участок. Особенности характеристики:
- характеристика имеет 2 нелинейных участках (верхний и нижний загибы);
- нижний участок обусловлен тем, что при очень малых зазорах магнитное сопротивление сердечника и якоря того же порядка, что и сопротивление зазора и пренебрегать ими нельзя;
- верхний участок обусловлен наличием активного сопротивления обмотки, который ограничивает нарастание тока в цепи. Активные сопротивления становятся сравнимыми с индуктивным при больших зазорах.
Чувствительность датчика. ![]() ,
,
где ![]() - начальный воздушный зазор, характеризующий выбор рабочей точки.
- начальный воздушный зазор, характеризующий выбор рабочей точки.
Достоинства: Простота и прочность конструкций, надежность в работе (т.к. отсутствуют скользящие контакт), возможность подключения к источникам промышленной частоты, относительно большая величина мощности на выходе преобразователя (несколько десятков ватт), поэтому можно подключать контрольный прибор непосредственно преобразователю
Недостатки: Ток в нагрузке зависит от амплитуды и частоты питающего напряжения; возможность работы только на относительно низких частотах до 3000 - 5000 Гц, т.к. на высоких резко растут потери в стали на перемагничивание и вихревые токи; необходимо устанавливать начальный воздушный зазор и, следовательно, начальный ток I; значительная нелинейность; есть напряжение холостого хода.
4.8.2. Дифференциальные индуктивные датчики
Дифференциальные индуктивные датчики (ДИД) представляют собой совокупность двух нереверсивных датчиков. Выполняются в виде системы, состоящей из двух магнитопроводов с общим якорем и двумя катушками. Рис 36.
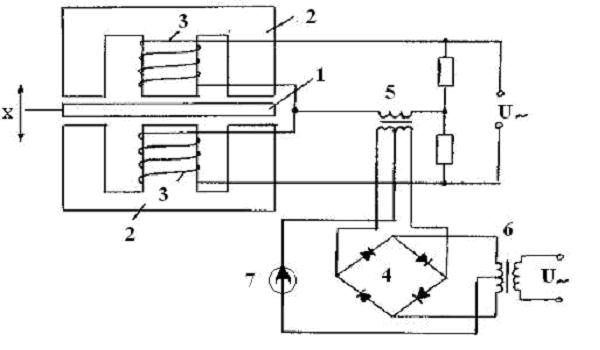
Рис. 36. Дифференциальный индуктивный датчик с фазочувствительным выпрямителям
Элементы схемы ДИД: 1 - якорь; 2 - сердечники; 3 - катушки; 4 - выпрямитель; 5 - измерительная обмотка; 6 - трансформатор питания; 7 – измерительный прибор.
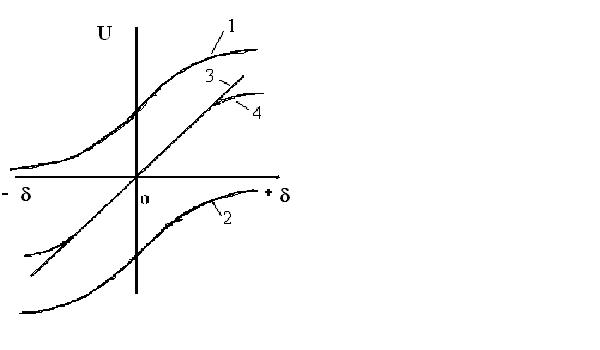
Рис. 37. Характеристика ДИД: 1 и 2 - характеристики нереверсивных датчиков; 4 – характеристика ДИД
При использовании фазочувствительных выпрямительных схем можно получить реверсивную характеристику с нулевой отметкой по середине шкалы. При симметричном положении якоря в обмотках воздушные зазоры одинаковы, индуктивные сопротивления одинаковы, значит и величины токов в катушке одинаковы ![]() . В итоге результирующий ток
. В итоге результирующий ток ![]() . разностной магнитный поток не создается, в измерительной обмотке ЭДС не индуктируется.
. разностной магнитный поток не создается, в измерительной обмотке ЭДС не индуктируется.
При смещении якоря от нейтрального положения магнитное сопротивление от одной из обмоток, например, увеличивается, другой уменьшается, в сердечнике создается разностный магнитный поток, в измерительной обмотке наводится переменный ЭДС, фаза зависит от направления смещения. ЭДС подается на выпрямитель, прибор показывает величину и направление смещения якоря. Рассмотренные ДИД применяются для измерения перемещения порядка долей и десятых долей миллиметра. Минимально возможно воздушный зазор ![]() по конструктивным условиям выбирается порядка 0,2 - 0,5 мм.
по конструктивным условиям выбирается порядка 0,2 - 0,5 мм.
Достоинства ДИД: большой линейной участок, рабочее перемещение увеличивается до ![]() ; чувствительность схемы в 2 раза больше;. большой коэффициент усиления; компенсируются погрешности) от притяжения, колебаний питающего напряжения и температуры окружающей среды
; чувствительность схемы в 2 раза больше;. большой коэффициент усиления; компенсируются погрешности) от притяжения, колебаний питающего напряжения и температуры окружающей среды
Недостатки: Большая инерционность, большие размеры, небольшой кпд.
4.8.3. Трансформаторные датчики
Это - датчики генераторного типа. Принцип действия трансформаторных датчиков основан на изменении индуктивности катушек при перемещении якоря.
Особенность трансформаторных датчиков - отсутствует электрическая связь между цепью питания (возбуждение) и измерительной цепью, это позволяет получить любое напряжение на выходе нагрузки независимо от величины напряжения источника питания.
Наибольшее распространение получили дифференциальные трансформаторные датчики (ДТД), представляющие собой 2 трансформатора с общим подвижным якорем. Рис.38.
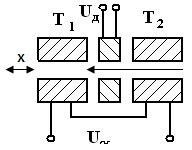
Рис. 38. Дифференциальный трансформаторный датчик
При симметричном положении якоря в выходной обмотке от обмоток Т1 и Т2 наводятся одинаковые и противоположные по знаку ЭДС.
При смещении якоря от нейтрального положения ЭДС от одной из обмоток, , увеличивается, а другой уменьшается, на выходе создается разностная ЭДС, фаза которой зависит от направления смещения.
Магнитоупругие датчики
Принцип действия магнитоупругого датчика основан на явлении изменения магнитной проницаемости ферромагнитных материалов в зависимости от величины механических напряжений, возникающих в них. Если к сердечнику приложить сжимающее, растягивающие, изгибающие, скручивающие усилия, то под действия этих усилий произойдет изменение магнитной проницаемости μ - сердечника, что вызывает изменение магнитного сопротивления Rм сердечника, при этом изменяется индуктивность катушки, помещенной на сердечник и ее полное сопротивление.
Магнитоупругих датчики могут быть индуктивными, трансформаторными и индукционными, т.е. в качестве выходной величины могут быть изменения индуктивности и взаимоиндуктивности и выполняются как из сплошного материала, так и из наборных сердечников. Эти датчики имеют высокую чувствительность, но необходимо компенсировать температурную погрешность и погрешности из-за гистерезиса.
Наряду с магнитоупругим эффектом существует магнитострикционный эффект; это явление обратное магнитоупругому эффекту состоит в том, что внешнее магнитное поле вызывает механические деформации ферромагнитного материала.
4.9. Индукционные датчики
Индукционными датчиками обычно являются электрические машины, работающие в генераторном режиме. Есть электрические машины специального исполнения: сельсины, синусно-косинусные трансформаторы (ВТ); они будут рассмотрены ниже. Есть специальные датчики: резольверы и индуктосины.
Индуктосин представляет собой машину, состоящую из двух изоляционных дисков, на смежных поверхностях которых нанесены печатные обмотки. Последние представляют токоведущие пластины, соединенные поочередно то у центра, то у периферии. Разумеется, число таких пластин должно быть четным. Рис. 39.
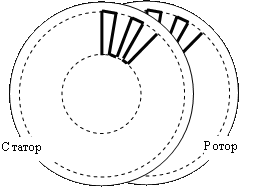
Рис. 39. Индуктосин
Диски расположены соосно параллельно и могут поворачиваться друг относительно друга. Магнитопровода индуктосин не имеет. Зазор между дисками весьма мал - 0, 1 мм. Синусоидальную зависимость взаимной индуктивности между статором и ротором достигают путем выбора определенного соотношения ширины проводника к полюсному делению, скоса проводников, сокращения шага обмотки. Частота напряжения питания индуктосина 10÷100 кГц. Однако, не смотря на небольшой зазор, коэффициент передачи напряжения составляет всего 0, 005÷0, 01. Тем не менее, при питании обмотки статора переменным током в роторе индуцируется ЭДС, величина которой является функцией угла поворота ротора. Погрешность синхронно-следящей системы с индуктосином очень маленькая - несколько угловых секунд. Вытесняются цифровыми датчиками (энкодерами).
Индукционные датчики очень широко применяются как элементы автомобильной автоматики. На их основе были созданы различные приборы - от самых простых, регистрирующих линейные перемещения, до сложных, таких как системы зажигания с цифровым управлением, системы впрыска топлива, антиблокировочные системы управления тормозами и т.п.
В простейшем случае датчик состоит из катушки с обмоткой, сердечника из магнитомягкого железа и магнита. Эти три компонента составляют статор датчика. Со статором взаимодействует ротор в виде зубчатого диска или зубчатой рейки с количеством зубцов, определяемым условиями применения датчика (рис.40).
При вращении ротора, в обмотке статора возникает переменное напряжение.Когда один из зубцов ротора приближается к обмотке, напряжение в ней быстро возрастает и, при совпадении со средней линией обмотки, достигает максимума, затем, при удалении зуба, быстро меняет знак и увеличивается в противоположном направлении до максимума.
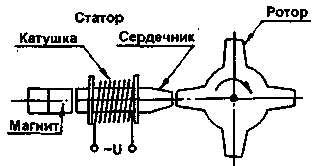
Рис. 40. Индукционный датчик оборотов
На приводимом графике (рис.41) отчетливо видна большая крутизна изменения напряжения, поэтому переход между двумя максимумами может быть использован для управления электронными системами.
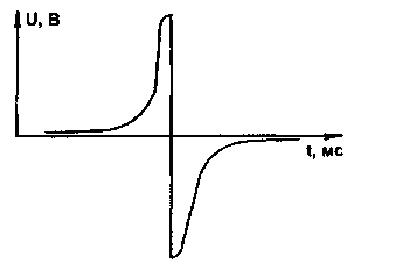
Рис. 41. Характеристика датчик оборотов
Величина напряжения, вырабатываемого датчиком, зависит от частоты вращения ротора, числа витков катушки и величины магнитного потока, создаваемого постоянным магнитом. Поскольку две последние величины постоянны, величина индуцируемого напряжения достигает максимума при максимальной частоте вращения. При конструировании следует уделять особое внимание усилению импульсов при малой частоте следования.
4.10. Пьезоэлектрические датчики
Пьезоэлектрические датчики относятся к датчикам генераторного типа.
Различают прямой и обратный пьезоэлектрический эффект. Прямой эффект заключается в том, что на гранях некоторых кристаллов при их сжатии или растяжении появляются электрические заряды, подобные поляризационным.
Прямой пьезоэлектрический эффект используется для измерения быстро протекающих динамических процессов - давления в стволах орудий при выстреле, давления газов в двигателях внутреннего сгорания, давления звуковых колебаний. Большое применение получили пьезоэлектрические адаптеры (звукосниматели), манометры, вибраторы, измерители ускорений (акселерометры) и многие другие устройства.
Обратный пьезоэлектрический эффект заключается в том, что при внесении пьезокристалла в электрическое поле, силовые линии которого совпадают с направлением пьезоэлектрической оси, происходит изменение геометрических размеров кристалла (сжатие или растяжение).
Материалы пьезокристаллов: кварц, сегнетова соль, титанат бария, турмалин, метаниобат свинца и бария. Материалы отличаются величиной пьезоэлектрической постоянной (К0 = 2* 10-12 – 150* 10-12 к/н) и другими параметрами. На рис. 42 показано устройство пьезоэлектрического датчика.
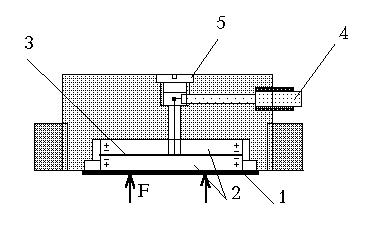
Рис. 42. Устройство пьезоэлектрического датчика
На рисунке обозначены: 1 - мембрана, воспринимающая усилия, 2 - соединенные параллельно пластины пьезокристаллов, 3 - латунная фольга, 4 - экранированный сигнальный кабель и 5 - пробка, закрывающая монтажное отверстие.
Достоинства: малые габариты, возможность измерения быстропеременных нагрузок, надежность и простота конструкции
Недостатки: Различны у различных материалов: у кварца малая пьезоэлектрическая постоянная, у других температурная зависимость.
Ультразвуковые датчики применяются в гидроакустике и в промышленности, при дефектоскопии деталей, а также в ряде приборов - расходометрах, газоанализаторах и др. Их основой служит акустическая система, в состав которой входят ультразвуковые приемопередатчики на основе пьезокерамических элементов..
Области применения пьезоэлектрических датчиков:
1) измерение вибраций;
2) измерение давлений;
3) измерение усилий;
4) измерение сосредоточенных сил;
5) измерение ускорений.
4.11. Оптические датчики
Схема любого оптического датчика состоит из следующих элементов: источника излучения (И), приемника излучения (П). среды передачи (М), организованного оптического канала (ОК) и объекта. Измеряемый параметр объекта меняет характеристику оптического канала, которая измеряется приемником.
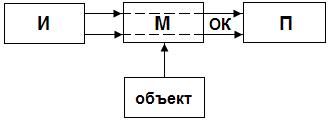
Рис. 43. Схема оптического датчика
Все оптические датчики можно поделить на три группы:
- датчики наличия и отсутствия,
- датчики положения и перемещения,
- датчики параметра среды, влияющего на прозрачность/поглощение.
Примером датчиков первой группы являются датчики серии А3. Оптические датчики серии А3 функционируют по трем принципам и делятся на три типа:
Отражающие оптические выключатели, которые излучают и принимают отраженный от объекта свет, находящегося в зоне действия датчика. Как только улавливается определенная световая энергия, на выходе устанавливается соответствующий логический уровень. Величина дистанции от датчика до объекта зависит от размеров улавливаемого предмета, от его цвета, шероховатости и т.д. и может достигать 2м. Конструктивно излучатель и приемник выполнены в одном корпусе.
Отражающие от световозвращателя, которые излучают и принимают свет, отраженный от специального отражателя (рефлектора) и при прерывании луча объектом выдается выходной сигнал. Дальность действия зависит от состояния среды (пыль, дым и т.д.) и может достигать 5 м. Конструктивно излучатель и приемник выполнены в одном корпусе.
Датчики сквозного типа, которые имеют раздельные конструктивно источник света и приемник, расположенные соосно друг напротив друга. Любой предмет попадающий в зону светового потока прерывает его и вызывает изменение выходного логического уровня. Дальность действия может достигать 20 м.
4.11.1. Фотоэлектрические датчики положения
Современные оптические датчики положения (ОДП) обеспечивают наиболее высокую разрешающую способность, надежность и точность, ОДП обладают и другими достоинствами. Для них характерна независимость метрологических параметров от нагрузки, а также высокая помехозащищенность.
Основой ОДП является оптическая система, включающая источник света, кодирующий элемент (диск или линейка) и блок фотоприемников. В качестве источников света используются оптронные пары и осветители в виде ламп накала с вольфрамовой нитью. Для обеспечения равномерной освещенности области кодирующего элемента применяются коллимационные линзы. Самым ответственным узлом ОДП, в наибольшей степени определяющим его характеристики, является кодирующий диск, на котором с высокой точностью фотоспособом выполнена маска. Тип маски определяет способ кодирования.
Обычно используют кодирующие диски, на дорожках которых по окружности размещается до 2500 оптических сегментов. Если же использовать лампы со специальной тонкой нитью накаливания, то на диске с диаметром 100 мм можно различать свыше 5000 таких сегментов.
ОДП классифицируются по двум основным признакам.
По форме выходного сигнала: относительные (накапливающие) и абсолютные.
По способу кодирования: растровые, импульсные и кодовые.
Накапливающие (циклические) преобразователи используют датчик и счетную систему, суммирующую отдельные приращения, а также репер (метку), относительно которого эти приращения суммируются.
Датчики абсолютных значений не содержат репера и выполняются либо одношкальными, либо в виде систем грубого и точного отсчета.
4.11.2. Растровые оптические датчики положения
Растровые оптические датчики (РОДП) предназначены для преобразования линейных и угловых перемещений в цифровой код на основе использования растровой решетки. Растровые решетки модулируют световой поток на пути от источника света к приемнику. Конструктивно растровая решетка - это прозрачная пластина, на которую нанесено большое количество непрозрачных штрихов различной формы, обычно равноудаленных и параллельных.
Для измерения линейных перемещений обычно используются сопряжение двух плоских параллельных растров, а для измерения угловых - сопряжение радиальных растров.
РОДП включает блок осветителя, создающий параллельный пучок света, растровое сопряжение из подвижного (измерительного) и неподвижного (индикаторного) растров, блок фотоприемников и электронный блок обработки. Блок обработки состоит из логической схемы и реверсивного счетчика, используемого в качестве накапливающего сумматора. Рис. 44.
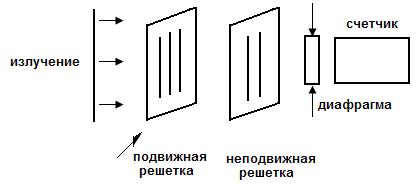
Рис. 44. Схема растрового оптического датчика
Диафрагма сканирующей головки содержит четыре щели, размещенные так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки. Количество импульсов определяет величину перемещения, а логическая схема определяет направление перемещения, используя последовательность поступления импульсов.
Точность РОДП определяется минимальным расстоянием между растрами шкал (шагом) и количеством растровых полос на 1 мм/рад. Это расстояние достигает у лучших датчиков 3 ... 5 мкм, а количество полос - 1000 на 1 мм. Разрешающая способность линейных РОДП составляет 1 ... 2 мкм.
К достоинствам РОДП относятся простая и технологичная конструкция, а также малые размеры и масса.
К недостаткам накопление ошибок от сбоев и помех в цепях реверсивного счетчика, потеря информации о перемещении при отказе в цепи питания, а также необходимость периодичного определения нулевого отсчета (для получения достоверного абсолютного значения измеряемого перемещения).
4.11.3. Кодовые оптические датчики положения
Рассмотренные ранее датчики формируют выходной сигнал в виде последовательности импульсов. Однако в большинстве случаев ДПП являются элементами цифровых систем управления, что требует преобразования выходного сигнала в цифровую форму. Именно такой сигнал формируется в кодовых фотоэлектрических датчиках (КОДП). Оптические системы КОДП и РОДП построены похожим образом, а кодирующая шкала КОДП представляет собой стеклянное основание с нанесенной на ней кодовой маской. Маска выполнена в виде нескольких (обычно до 20) дорожек с прозрачными и непрозрачными сегментами. Количество дорожек, как правило, определяет разрядность выходного двоичного кода. В момент съема информации луч, проходя через прозрачные сегменты кодовых дорожек шкалы и ограничивающую щелевую диафрагму, освещает фотоприемники (фотодиодные линейки) (рис. 45).
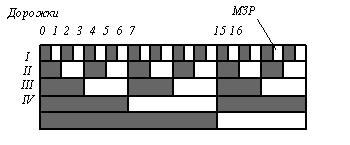
Рис. 45. Вид кодовой маски
Отсутствие сигнала с фотоприемника соответствует двоичному нулю, наличие – двоичной единице. В результате каждому перемещению соответствует определенная комбинация двоичных единиц и нулей, являющаяся его цифровым кодом.
Вид конструктивной схемы КОДП определяется, главным образом, числом разрядов шкалы и способом кодирования и считывания. В КОДП, наиболее часто используются две схемы: КОДП с прямым двоичным кодом и КОДП с кодом Грея.
Шкалы с прямым двоичным кодом представляют собой оптические рейки или диски, разделенные на равновеликие площадки - полосы для реек и сектора - для дисков, на которых записаны бинарные слова, соответствующие прямому двоичному коду. Число площадок N определяет разрешающую способность КОДП: Da = L/N или Da = 3600/N . (Здесь L - длина рейки).

Рис. 46. Шкала с прямым двоичным кодом
Несмотря на простоту кодирования и считывания шкалам с обычным двоичным кодом присущ крупный недостаток, связанный с появлением ложных кодов. Эта особенность обусловлена невозможностью изготовления идеальных шкал и проявляется во время движения шкалы, в момент изменения «1» на «0» или «0» на «1» одновременно в нескольких разрядах. Так, при изменении кода 7 на 8, т.е. 0111 на 1000 происходит замена значений сразу в четырех разрядах. Если же, случайно (из-за погрешностей шкалы), например, во 2 разряде, не происходит изменение «1» на «0», тогда вместо значения «8» будет считано «10» (1010). Существенно, что величина ошибки превышает цену деления шкалы, равную одному младшему значащему разряду (МЗР). Вероятность возникновения неоднозначности считывания информации в КОДП особенно велика при высоких скоростях движения шкалы.
Для устранения неоднозначности считывания применяются специальные методы считывания и специальные коды. Большинство выпускаемых промышленно КОДП используют код Грея, при котором ошибка считывания не превышает величины МЗР, независимо от того, в каком из разрядов произошла ошибка. Недостатком датчиков, использующих шкалы с кодом Грея, является необходимость последующей дешифрации кодов Грея в стандартный двоичный код.
Для преобразования числа из двоичного кода в код Грея используют выражение:
gk = bk+1 Å bk (mod 2),
где число в двоичном коде, представлено, как B = bn bn-1 ... b2 b1 , а в коде Грея как G = gn gn-1 ... g2 g1.
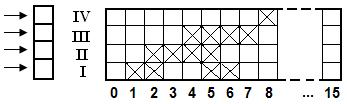
Рис. 47. Шкала с кодом Грея
Промышленно выпускаются одношкальные и двухшкальные КОДП. Самые современные датчики первого типа имеют 12 … 16 разрядную шкалу, двухшкальные КОДП содержат две 7… 9 разрядных шкалы. И та и другая схемы позволяют получить 16 разрядный двоичный код и гарантировать разрешающую способность до 20 ".
Некоторые модели КОДП представлены в табл.. 5.
Таблица 5. Примеры промышленных КОДП
|
Модель |
n, разряд |
K , шкал |
N, об |
Da, ‘ |
w, об/мин |
Æ, мм |
l, мм |
m, кг |
|
ППК-15 |
15 |
2 |
16 |
10,5 |
900 |
50 |
160 |
0,8 |
|
ROC 717 |
17 |
1 |
0,2 |
0,6 |
||||
|
TSI-200 |
20 |
2 |
0,5 |
70 |
75 |
0,4 |
В настоящее время все самые современные системы измерения перемещений строятся на основе КОДП. Их достоинства связаны с возможностью непосредственного получения двоичного кода и высокой точностью измерений. Недостатки этих датчиков обусловлены технологической сложностью и высокой стоимостью, а также значительными габаритами.
5. Преобразователи АЦП и ЦАП (DAC & ADC)
5.1. Преобразование аналогового сигнала в цифровую форму
В настоящее время в большинстве случаев датчики являются элементами цифровых систем управления, что требует преобразования сигнала датчиков в цифровую форму, при вводе в контроллер и иногда обратного преобразования цифрового управляющего сигнала контроллера в аналоговую форму при выводе на исполнительное устройство. Аналого-цифровое преобразование (АЦП, ADC) содержит 3 фазы: дискретизацию по времени, квантование по уровню, цифровое, двоичное кодирование.
а) При дискретизации по времени из непрерывного сигнала x(t) формируется последовательность отсчетов y(Ti). В случае равномерной дискретизации ![]() . Возможность восстановления исходного сигнала по отсчетам определена теоремой Котельникова, по которой между частотой квантования и максимальной частотой спектра сигнала, которую надо учитывать, должно выполняться соотношение.
. Возможность восстановления исходного сигнала по отсчетам определена теоремой Котельникова, по которой между частотой квантования и максимальной частотой спектра сигнала, которую надо учитывать, должно выполняться соотношение.
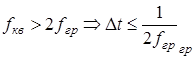 .
.
Для упрощения построения АЦП обычно выбирают ![]() . Рис. 48.
. Рис. 48.

Рис. 48. Аналого-цифровое преобразование
b) Квантование по уровню состоит в округлении значения отсчета до ближайшего уровня квантования. Весь диапазон значений измеряемой величины от ![]() до
до ![]() разбивается на равные интервалы. Действительные значения воспроизводятся с помощью дискретных, отличающихся на
разбивается на равные интервалы. Действительные значения воспроизводятся с помощью дискретных, отличающихся на ![]() . Процесс перехода от непрерывных значений в дискретные называется квантованием.
. Процесс перехода от непрерывных значений в дискретные называется квантованием. ![]() - шаг квантования. Шаг выбирается в пределах допускаемой погрешности измерения. Времени
- шаг квантования. Шаг выбирается в пределах допускаемой погрешности измерения. Времени ![]() соответствует значение
соответствует значение ![]() , и т.д. Величина
, и т.д. Величина ![]() - единицы измерения. Это равномерная шкала квантования, реже используются другие, например, логарифмические или специальные: A, l.. При квантовании возникает задержка нулевого уровня, которую надо учитывать при оценке динамических характеристик системы:
- единицы измерения. Это равномерная шкала квантования, реже используются другие, например, логарифмические или специальные: A, l.. При квантовании возникает задержка нулевого уровня, которую надо учитывать при оценке динамических характеристик системы: ![]() .
.
c) Отсчеты кодируются в двоичном или двоично-десятичном коде. Для цифрового кодирования необходимо в каждый дискретный момент времени воспроизвести в цифровой форме значения, заменившее непрерывную измеряемую величину. Для этого дискретные значения ![]() представляют в виде последовательности цифровых кодов. Например, Х0 – 001, Х1 – 101, Х2 – 111 и т. д.
представляют в виде последовательности цифровых кодов. Например, Х0 – 001, Х1 – 101, Х2 – 111 и т. д.
Преимущества цифровой формы, кроме непосредственной обработки контроллером:
1) большая помехоустойчивость;
2) простота передачи на расстояние;
Аналого-цифровое преобразование приводит к образованию двух видов ошибок: это ошибки метода и приборные ошибки.
Ошибки метода:
1. Задержка нулевого уровня
.
2. Ошибка квантования
. При N-разрядном коде
, где S – диапазон входной величины.
Приборные ошибки АЦП.
1. Нелинейность характеристики; дрейф нуля, дребезг младшего разряда.
2. Динамические ошибки при переходном процессе, конечное время преобразования.
3. Ложные частоты.
5.2. Цифро-аналоговые преобразователи (ЦАП)
ЦАП служат для преобразования информации из цифровой формы в аналоговый сигнал. ЦАП широко применяется в различных устройствах автоматики для связи контроллеров, вырабатывающих сигналы управления в виде цифрового кода, с аналоговыми элементами системы.
Принцип работы ЦАП состоит в суммировании аналоговых сигналов, пропорциональных весам разрядов входного цифрового кода, с коэффициентами, равными нулю или единице в зависимости от значения соответствующего разряда кода.
ЦАП преобразует цифровой двоичный код а0, а1, а2, .. ап-1 в аналоговую величину, обычно напряжение Uвых.. Каждый разряд двоичного кода имеет определенный вес i-го разряда вдвое больше, чем вес (i-1)-го. Работу ЦАП можно описать следующей формулой:
![]() ,
,
где e = ![]() - напряжение, соответствующее весу младшего разряда, аi - значение i -го разряда двоичного кода (0 или 1).
- напряжение, соответствующее весу младшего разряда, аi - значение i -го разряда двоичного кода (0 или 1).
Например, числу 1001 соответствует: Uвых=e*(0*1+0*2+1*4+1*8)=12*e.
Точность преобразования: ![]() ,и для
,и для ![]() .
.
Выбором е можно установить требуемый масштаб аналоговой величины. На рисунке 49 приведена схема цифро-аналогового преобразователя.
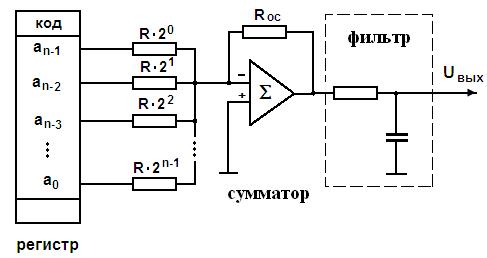
Рис. 49. Схема цифро-аналогового преобразователя
В регистр записывается двоичный код выходного сигнала, на выходе сумматора формируется аналоговый эквивалентный сигнал. Этот сигнал имеет ступенчатую форму (рис. 50) и для его сглаживания нужен фильтр низкой частоты.
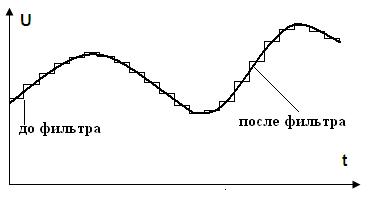
Рис. 50. Сигналы на выходе сумматора и фильтра
5.3. Типовые схемы АЦП
Существуют различные типы АЦП. Мы остановимся лишь на тех типах, которые получили в настоящее время наибольшее распространение.
АЦП параллельного типа является самым быстродействующим. У него существенно меньше, чем у других АЦП время преобразования (tпр). Структурная схема АЦП параллельного типа приведена на рис. 51.
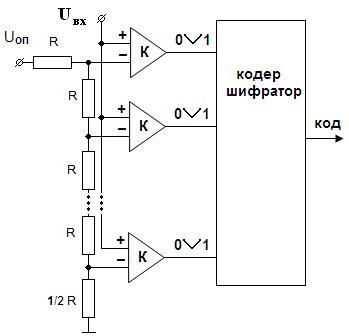
Рис. 51. Схема АЦП параллельного типа
Здесь входная аналоговая величина Uвх с выхода схемы ВХ сравнивается с помощью 2n+1 – 1 компараторов с 2(2n-1) эталонными уровнями, образованными делителем из резисторов равного сопротивления. На вход делителя подается стабилизированное опорное напряжение Uоп. При этом срабатывают те (m) младших компараторов, на входе которых уровень сигнала выше эталонного уровня. На выходах этих компараторов образуется единичный код, на выходе остальных (n-m) нулевой код. Код с выхода компараторов затем с помощью специального кодера-дешифратора преобразуется в двоично-кодированный выходной сигнал.
Погрешность АЦПП определяется неточностью и нестабильностью эталонного напряжения, резистивного делителя и погрешностями компараторов. Значительную роль могут играть входные токи компараторов, если делитель недостаточно низкоомный. Основной недостаток требуется набор прецизионных сопротивлений.
АЦП последовательного приближения является наиболее распространенным. Существует много различных вариантов схемы такого АЦП. Структурная схема АЦППП со счетчиком приведена на рисунке 52. Схема работает следующим образом. Входной аналоговый сигнал Х перед началом преобразования запоминается схемой выборки – хранения (В/Х), что необходимо, так как в процессе преобразования необходимо фиксировать значение аналогового сигнала. Сигнал с выхода схемы выборки – хранения подается на один из входов компаратора, на второй вход которого подается сигнал с выхода ЦАП. Состояние ЦАП определяется кодом, хранящимся в запоминающем устройстве (ЗУ), а этот код соответствует в свою очередь состоянию счетчика, входящего в состав устройства управления (УУ).
В начальный момент времени счетчик обнулен, на выходе ЦАП нулевой сигнал, на выходе компаратора сигнал логической единицы.
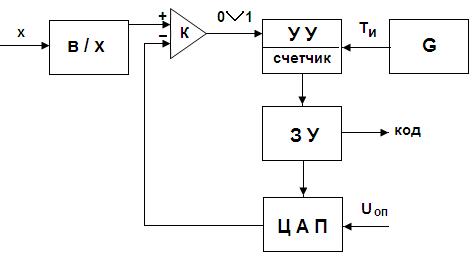
Рис. 52. Схема АЦП последовательного приближения
Далее по команде “Пуск” с генератора G на счетчик подаются тактовые счетные импульсы; код на выходе счетчик последовательно увеличивается; соответственно увеличивается напряжение на выходе ЦАП. Как только оно сравнивается с входным аналоговым сигналом, срабатывает компаратор, процесс счета останавливается и на выходе ЗУ формируется двоичный цифровой код, соответствующий входному аналоговому сигналу.
Погрешность АЦП определяется разрядностью АЦП, неточностью ЦАП, зоной нечувствительности и т. д.
 , например для n=8 имеем d=100/256=0,4%.
, например для n=8 имеем d=100/256=0,4%.
На входе АЦП тоже включают аналоговый фильтр нижних частот, для уменьшения помех, после АЦП. В системах управления обязательно используют цифровой фильтр для усреднения сигнала, устранения влияния помех и субчастот.
5.4. Интеллектуальные датчики
В настоящее время все чаще применяют «интеллектуальные датчики». Интеллектуальный датчик имеет встроенный микропроцессор, выполняющий некоторую обработку сигнала, и поэтому может давать более точные показания благодаря применению числовых вычислений для компенсации нелинейностей чувствительного элемента или температурной зависимости. В круг возможностей некоторых приборов входит измерение нескольких параметров и пересчет их в одно измерение (например, объемный расход, температуру и давление – в массовый расход, т.н. многопараметрические датчики), функции встроенной диагностики, автоматическая калибровка.
Некоторые интеллектуальные приборы (например, семейство приборов Rosemount SMART FAMILY) позволяют посылать в канал передачи аналоговый сигнал, и цифровой. В случае одновременной трансляции обоих видов сигналов, аналоговый используется для трансляции значения измеренного параметра, а цифровой – для функций настройки, калибровки, а также позволяет считывать измеряемый параметр. d = 0,075%. Эти устройства обеспечивают преимущества цифровой связи и, в то же время, сохраняют совместимость и надежность аналоговых средств, которые требуются для существующих систем.
Считывание измеряемого параметра в цифровой форме повышает точность за счет ограничений операций цифро-аналогового и аналого-цифрового преобразований сигнала 4..20 мА. Но цифровой способ измерения вносит задержку в измерения (время, затраченное на последовательную передачу информационной посылки), которая может быть неприемлема для управления быстродействующими контурами.
Цифровой датчик позволяет хранить последовательную информацию о процессе (тэг, описатель позиции измерения, диапазон калибровки, единицы измерения), записи о процедурах его обслуживания и т.п., считываемой по запросу. Многопараметрические приборы содержат базу данных по физическим свойствам измеряемых жидкостей и газов. Для сильно распределенных объектов интеллектуальному датчику нет альтернативы. благодаря встроенному интерфейсу с промышленной локальной сетью.
В класс интеллектуальных цифровых устройств входят и специализированные микросхемы, например контроллеры для работы с термопарами.
Фирма Analog Device выпускает AD596/AD597 – монолитные контроллеры, оптимизированные для использования в условиях любых температур в различных случаях. В них осуществляется компенсация напряжения холодного спая и усиление сигналов с J- и К-термопары таким образом, чтобы получить сигнал, пропорциональный температуре. Схемы могут быть подстроены так, чтобы обеспечить выходное напряжение 10 мВ/°С непосредственно от термопар типа J или К. Каждый из чипов размещен в металлическом корпусе с десятью выводами и настроен на работу при температуре окружающей среды от 25°С до 100°С.
AD596 усиливает сигналы термопары, работающей в температурном диапазоне от 200°С до +760°С, рекомендованном для термопар типа J, в то время как AD597 работает в диапазоне от -200°С до +1250°С (диапазон термопар типа К). Усилители откалиброваны с точностью ±4°С при температуре окружающей среды 60°С и характеризуются температурной стабильностью 0,05°С/°С при изменении температуры окружающей среды в пределах от 25°С до 100°С.
Все вышеописанные усилители не в состоянии компенсировать нелинейность термопары: они способны лишь корректировать и усиливать сигнал с термопарного выхода. АЦП с высокой разрешающей способностью, входящие в семейство AD77xx, могут использоваться для прямой оцифровки сигнала с выхода термопары, без предварительного усиления. Преобразование и линеаризацию осуществляет микроконтроллер. Два мультиплексируемых входа АЦП используются для прямой оцифровки сигнала с термопары и с теплового датчика, находящегося в контакте с ее холодным спаем. Вход PGA (программируемого усилителя) программируется на усиление от 1 до 128, и разрешающая способность АЦП лежит в пределах от 16 до 22 бит в зависимости от того, какая из микросхем выбрана пользователем. Микроконтроллер осуществляет как компенсацию напряжения холодного спая, так и линеаризацию характеристики.
6. Исполнительные элементы автоматики. Двигатели постоянного тока
6.1. Классификация основные характеристики исполнительных элементов автоматики автоматизированных систем управления
Эффективность системы автоматического управления (САУ) в значительной мере определяется правильностью выбора исполнительного элемента. Исполнительный элемент (ИЭ), исполнительный механизм (ИМ) - устройство, обеспечивающее непосредственную реализацию алгоритма управления с помощью физического воздействия на объект управления, например изменение положения потенциометра, механическое воздействие на клапан и т.д.
Он представляет собой элемент САУ, соединенный с объектом управления (ОУ) через регулирующий орган (РО). Основная задача ИЭ состоит в том, чтобы усилить сигнал, поступающий на его вход, от регулятора, до уровня достаточного для перемещения РО. РО, в свою очередь, изменяет поток вещества или энергии, поступающий в ОУ, осуществляя требуемое воздействие на объект.
Основными элементами ИМ являются привод (двигатель) и передаточный механизм (редуктор). В некоторых случаях РО является неотъемлемой частью ИЭ и рассматривается с ним как единое целое.
Многообразие ОУ и САУ приводит к тому, что в них используются разные ИМ. Так, к ИЭ, в ряде случаев, можно отнести электромагнитные реле, магнитные пускатели, контакторы, электромагнитные муфты, электродвигатели постоянного и переменного тока. В других случаях к ИЭ относят нагревательные, вентиляционные и другие устройства, с помощью которых осуществляется управление параметрами ОУ.
Исполнительные элементы по виду используемой энергии входит в одну из ветвей ГСП и делятся на группы: электрические, пневматические и гидравлические. Основные характеристики ИЭ:
- быстродействие, инерционность, зона нечувствительности;
- номинальные и максимальные значения мощности или производительности, вращающего момента на выходном валу или усилия на выходном штоке;
- точность отработки команды,
- энергопотребление и кпд,
- весогабаритные показатели на 1 единицу мощности,
- надежность.
Так же как и у других элементов автоматики, и каждого типа ИЭ есть статические и динамические характеристики. Для их получения используют следующую модель ИЭ - это многополюсник, у которого выделяют три группы параметров: входные, выходные и возмущения. Рис. 60.
Рис. 60. Модель исполнительного элемента: X - входные параметры, Y - выходные, Z - возмущения
Выходной параметр Y есть функция, как входного параметра X, так и возмущения Z.
Y = F(X, Z).
При различных, но фиксированных (постоянных) значениях возмущения получаем семейство регулировочных статических характеристик.
Y = F1(X, Z=const).
При различных, но фиксированных (постоянных) значениях входного воздействия получаем семейство внешних (механических) статических характеристик.
Y = F2(Z, X =const).
Аналогично, получаем две передаточных функции: по задающему воздействию и по возмущению.
Wx(p)=Y(P)/X(p), Wz(p)=Y(P)/Z(p).
6.2. Конструкция и принцип действия двигателя постоянного тока
В качестве исполнительных элементов во многих устройствах автоматики: в радиоэлектронных, оптических, механических, а также и портативных аппаратах, снабжённых автономными источниками электрической энергии, широко используются электродвигатели постоянного тока. Эти двигатели имеет ряд преимуществ перед другими видами ИЭ: линейность механических характеристик (ДПТ), хорошие регулировочные свойства, большой пусковой момент, высокое быстродействие, большой диапазон по мощность различных типов ДПТ и хорошие весогабаритные показатели.
Основным недостатком этих двигателей является наличие щеточно-коллекторного устройства, ограничивающего срок службы ДПТ и удорожающего обслуживания ДТП, вносящего дополнительные потери, являющегося источником помех и практически исключающего возможность использования ДПТ в условиях агрессивных и взрывоопасных сред.
6.2.1. Конструкция ДПТ
Конструктивно ДПТ состоит из статора (неподвижной части) и ротора или якоря (вращающейся части), помещённого внутри статора. Упрощённо конструкцию машины можно пояснить с помощью рис.61.
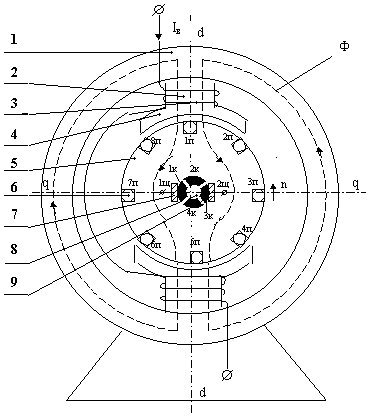
Рис. 61. Конструкция ДПТ
Статор состоит из стальной станины 1, на внутренней поверхности которой расположены главные полюса, состоящие из сердечников 2 и катушек возбуждения 3. В нижней части сердечника полюса имеется полюсный наконечник 4, который обеспечивает нужное распределение магнитной индукции в воздушном зазоре машины. К станине с торцевых сторон прикреплены подшипниковые щиты ( на рис. 61 не показаны ), к одному из которых прикреплены щёткодержатели с металлографитовыми щётками 9.
Ротор ( якорь ) ДПТ состоит из сердечника 5, обмотки якоря 6, коллектора 7 и вала 8.
Сердечник 5 представляет собой цилиндр, набранный из штампованных листов электротехнической стали, с отверстием под вал двигателя и с пазами, в которых укладываются проводники обмотки якоря.
Коллектор 7 – цилиндр, набранный из медных пластин трапециевидного сечения, изолированных электрически друг от друга и от вала двигателя.
Обмотка якоря машины представляет собой замкнутую систему проводников, уложенных и укреплённых в пазах сердечника 5. Она состоит из секций (катушек), выводы которых соединены с двумя коллекторными пластинами. У микромашин обычного исполнения с одной парой полюсов на статоре обмотка якоря представляет собой простую петлевую обмотку (схема рис.62), при построении которой выводы секций обмоток присоединяются к двум соседним коллекторным пластинам, а число секций обмотки и число коллекторных пластин коллектора одинаково.
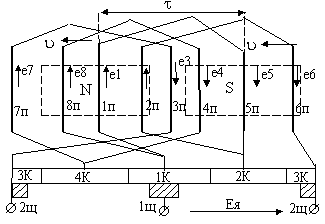
Рис. 62. Схема обмотки якоря ДПТ
Обмотка, схема которой приведена на рис. 62, содержит 4 секции, каждая из которых состоит из активных сторон 1, располагающихся в пазах сердечника и лобовых частей 2, посредством которых активные стороны секций соединяются между собой и с коллекторными пластинами. Чтобы ЭДС, наводимые в активных сторонах секций складывались, необходимо расположить активные стороны одной секции в пазах сердечника, отстоящих друг от друга на расстоянии полюсного деления t. Ротор, приведенный на рис. 6.1, имеет 8 активных проводников, причем секции образуют проводники 1 – 5, 2 – 6, 3 – 7 и 4 – 8.
6.2.2. Электромагнитный момент ДПТ
Принцип действия ДПТ основан на взаимодействии тока проводников обмотки якоря с магнитным полем возбуждения, в результате чего на каждый проводник обмотки якоря действует электромеханическая сила, а совокупность сил, действующих на все активные проводники обмотки, образует электромагнитный момент машины. Пусть у нас есть рамка с током, помещенная в поле постоянного магнита. Рис. 63.
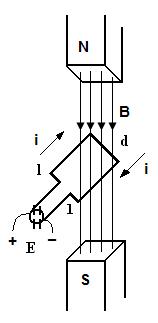
Рис. 63. Принцип действия ДПТ
На каждый проводник с током, помещенный в магнитное поле машины действует электромагнитная сила:
![]() ,
,
где l- длина активного проводника, B - индукция в данной точке воздушного зазора, i – ток в проводнике. Пусть каждая сторона рамки содержит число параллельных ветвей обмотки 2а. Тогда ,если через щетки машины протекает ток Iя , называемый током якоря, то через каждый проводник обмотки якоря протекает ток:
![]() .
.
Совокупность сил действующих на все N проводников рамки приводит к возникновению результирующего электромагнитного момента машины:
![]() .
.
Пусть, у рассматриваемого ДПТ имеется 2р полюсов (в большинстве случаев в микромашинах 2р = 2, т. е. число пар полюсов р = 1). Расстояние по окружности якоря между серединами смежных полюсов называется полюсным делением t . Очевидно, что
 , где d – диаметр рамки.
, где d – диаметр рамки.
Т.к. произведение l*r есть площадь, которую пронизывает полезный магнитный поток полюса Ф, то величина этого потока может быть определена как Ф=Вср*l*r.
После подстановки получим:
![]() или
или ![]() ,
,
где ![]() это - электромагнитная конструктивная постоянная машины.
это - электромагнитная конструктивная постоянная машины.
Таким образом, электромагнитный момент, развиваемый ДПТ пропорционален магнитному потоку Ф и току якоря машины Iя. При вращении ротора (якоря) должно выполняться условие равенства моментов:
М=Мн+Мп+Мд,
где Мн – момент полезной нагрузки, Мп – момент потерь и
![]() - динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
- динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
6.2.3. Электродвижущая сила ДПТ
При вращении ротора ДПТ в каждом активном проводнике обмотки якоря, пересекающем нормальные к его поверхности силовые линии магнитного поля полюсов наводятся ЭДС. Направление ЭДС определяется по правилу правой руки; величина ЭДС определяется выражением
e=Blv,
где l длина активного проводника, B - индукция в данной точке воздушного зазора, v - линейная скорость перемещения проводника относительно линий нормальной к поверхности ротора индукции. При этом при вращении ротора ЭДС в каждом проводнике является периодической переменной во времени величиной.
ЭДС якоря машины равна алгебраической сумме ЭДС проводников, образующих одну параллельную ветвь машины. Каждая параллельная ветвь представляет собой группу последовательно соединённых секций, ток в которых имеет одинаковое направление. Для простой петлевой обмотки число параллельных ветвей 2а всегда равно числу полюсов 2р.
Таким образом, для двухполюсной машины обмотка якоря по отношению к щёткам имеет две параллельных ветви, ЭДС в проводниках которых направлены согласно. Несмотря на то, что при вращении ротора всё новые и новые проводники будут образовывать параллельные ветви, направление ЭДС в проводниках, а также направление суммарной ЭДС параллельной ветви или ЭДС якоря Ея остаётся неизменной при неизменном направлении вращения ротора.
Поскольку число активных проводников параллельной ветви весьма велико, то, несмотря на пульсирующий характер ЭДС каждого из проводников суммарная ЭДС (E) остается практически постоянной при постоянной скорости вращения ротора. В таком случае можно воспользоваться значением средней индукции в воздушном зазоре машины Вср и найти ЭДС.
 , также
, также ![]() и
и ![]() .
.
Зная, что линейная скорость равна v=w∙R==w∙d/2, где w - угловая частота вращения ротора в рад/с, d - диаметр ротора, получим
![]()
Величина полезного магнитный поток полюса Ф может быть определена как, ![]() ,
,
где - полюсное деление, а l*t - площадь, которую пронизывает этот поток.
Тогда
![]() , где
, где ![]() - электрическая конструктивная постоянная машины.
- электрическая конструктивная постоянная машины.
Для системы СИ обе конструктивные постоянные численно совпадают: См = Се. Таким образом, ЭДС якоря машины пропорциональна величине магнитного потока полюсов и частоте вращения ротора. При постоянном магнитном потоке Ф ЭДС якоря машины пропорциональна частоте вращения ротора, т.е.
![]() ,
,
что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.
6.3. Режимы работы и основные уравнения ДПТ
Любая машина постоянного тока обладает свойством обратимости, т.е. она может работать как в генераторном, так и в двигательном режиме при изменении знака момента нагрузки на ее валу или при изменении напряжения на якоре.
Генераторный режим работы машины – такой режим, при котором ток якоря Iя и ЭДС Ея совпадают по направлению, а электромагнитный момент, развиваемый машиной, противоположен по направлению вращению ротора. Такой режим имеет место, если внешний момент М разгоняет ротор ДПТ до скорости w, а цепь якоря замкнута на сопротивление нагрузки Rн (рис. 64а).
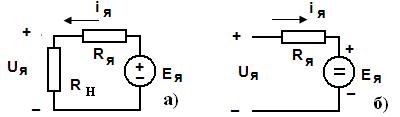
Рис. 64. Схема якорной цепи ДПТ: а) генераторный режим, б) двигательный режим
Определяя по правилу левой руки направление силы, действующей на проводник, найдём, что электромагнитный момент машины в этом случае направлен встречно вращению и, следовательно, встречно внешнему моменту нагрузки Мн .
При работе машины в генераторном режиме ЭДС якоря уравновешивается падением напряжения на нагрузке и падением напряжения от тока якоря на сопротивлении якоря, т. е.
![]() .
.
Уравнение баланса мощностей при работе машины в генераторном режиме имеет вид
![]() ,
,
где Рмех – механическая мощность, потребляемая машиной от источника механической мощности, Рм – потери мощности в обмотке якоря, Рх – потери холостого хода, состоящие из потерь на трение в подшипниках и потерь на перемагничивание материала ротора, Рн – электрическая мощность в нагрузке, Рв – потери в меди обмотки возбуждения.
Двигательный режим работы машины - это такой режим, при котором электромагнитный момент машины М совпадает по направлению со скоростью, а ЭДС якоря Ея направлена встречно току якоря.
Пусть к щёткам двигателя, ротор которого нагружен моментом Мн подведено от внешнего источника напряжение U (рис.64б). Взаимодействие тока якоря Iя с потоком возбуждения приведёт при неподвижном роторе к появлению электромагнитного момента, называемого пусковым с направлением, определяемым по правилу левой руки.
![]() , где
, где  .
.
Если Мп > М, то якорь двигателя придёт во вращение в направлении действия момента Мп. При этом в обмотке якоря появится ЭДС Ея, направленная встречно току в якоре (противоЭДС). При постоянной скорости вращения напряжение на якоре U будет уравновешено ЭДС Ея и падением напряжения от тока якоря на сопротивление якоря Rя,
![]()
При этом Мп = М, и якорь будет вращаться с постоянной скоростью. Уравнение баланса мощности для двигательного режима работы имеет вид:
![]()
где Pэл- электрическая мощность потребляемая от сети, Pмех- полезная механическая мощность на валу двигателя.
6.4. Характеристики ДПТ с независимым возбуждением
В зависимости от способа возбуждения различают ДПТ с независимым (или параллельным) возбуждением, с последовательным возбуждением и со смешанным возбуждением. Разновидностью независимого возбуждения является возбуждение от постоянных магнитов. Характерной особенностью таких двигателей является независимость тока возбуждения (и потока возбуждения) от тока якоря машины.

Рис. 65. ДПТ с независимым возбуждением, а) параллельным, б) от постоянных магнитов
Подставим в основное уравнение ДПТ в двигательном режиме работы выражения для тока якоря и ЭДС.
![]() ,
, ![]() и
и  .
.
В результате получим:
![]() .
.
Разрешив последнее уравнение относительно w, получим уравнение механической характеристики ДПТ с независимым возбуждением. Се = См.
![]() .
.
Так как в этом случае Ф=const, то обозначим к = СФ и получим:
![]() .
.
Здесь wxx скорость идеального холостого хода машины; а Dw - изменение скорости, обусловленное моментом нагрузки двигателя. Сама механическая характеристика ДПТ с независимым возбуждением приведена на рис.66 и представляет собой прямую линию, наклон которой к оси абсцисс зависит от величины потока возбуждения и сопротивления якоря Rя. Чем меньше величина потока возбуждения и чем больше сопротивление Rя, тем круче механическая характеристика.
Порядок построения механическая характеристика ДПТ с независимым возбуждением по паспортным данным двигателя.
Вычисляем значение k из соотношений ![]() ,
, ![]() и получим:
и получим: 
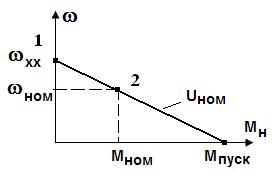
Рис. 66. Механическая характеристика ДПТ с независимым возбуждением
Вычислим wxx скорость холостого хода (точка 1). ![]() .
.
Определим положение рабочей точки 2: для этого возьмем паспортное значение wном и вычислим значение момента:  .
.
Проведем прямую линию через две точки; она пересечет ось моментов в точке пускового момента. М=Мп.
Как следует из уравнения механической характеристики, скорость двигателя при постоянном моменте нагрузки можно регулировать тремя способами:
- Изменением напряжения на якоре двигателя,
- Изменением сопротивления в цепи якоря двигателя,
- Изменением потока возбуждения машины.
При регулировании скорости первым способом, напряжение на якоре изменяется либо с помощью реостата, либо с помощью усилительно – преобразовательного устройства, при этом поток возбуждения остаётся постоянным. Семейство механических и регулировочных характеристик, соответствующих данному способу регулирования, приведено на рис.67.
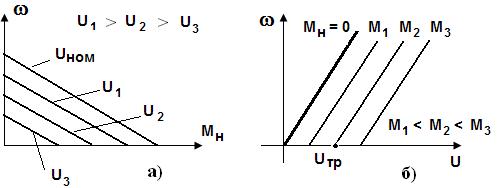
Рис. 67. Семейство механических (а) и регулировочных (б) характеристик ДПТ с независимым возбуждением
С изменением напряжения U пропорционально изменяется и скорость холостого хода при этом угол наклона (или жестокость) механических характеристик остаётся неизменной. Регулировочные характеристики линейны при напряжении на якоре U > Uтр; у них есть имеет зона нечувствительности при напряжении на якоре U < U тр, где U тр – напряжение трогания двигателя. Двигатель не будет вращаться до тех пор, пока М<Мн, а для создания такого момента необходимо иметь при скорости вращения w=0 ток якоря Iтр и соответствующее напряжение Uтр..
![]()
Несмотря на то, что рассмотренный способ регулирования требует довольно сложного оборудования, его широко применяют в современных электроприводах, т.к. он обеспечивает плавное и экономичное регулирование скорости в широких пределах при сохранении высокой жесткости механических характеристик. Лучшие современные системы при данном способе обеспечивают диапазон до 1:100000.
6.5. Регулирование скорости ДПТ изменением сопротивления в цепи якоря и изменением потока возбуждения
Схема регулирования скорости ДПТ путем изменением величины добавочного сопротивления, включённого последовательно в цепь якоря, и семейство механических характеристик приведено на рис. 68.
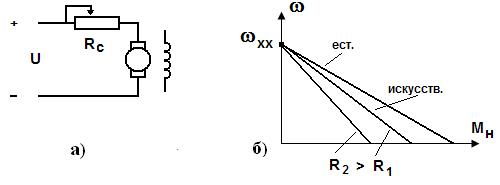
Рис. 68. Регулирование скорости ДПТ изменением сопротивления в цепи якоря
С увеличением добавочного сопротивления якоря Rс увеличивается угол наклона механической характеристики к оси абсцисс, при этом заданному моменту нагрузки соответствуют различные скорости вращения ротора. Скорость холостого хода в данном случае не изменяется. Достоинством такого способа регулирования скорости является простота схемной и аппаратурной реализации, недостатком - большие потери энергии в добавочном сопротивлении, узкий диапазон регулирования скорости при малых моментах нагрузки и малая жесткость механических характеристик при больших сопротивлениях Rc. Регулировочная характеристика нелинейная.
Регулирование скорости вращения изменением потока возбуждения(полюсное управление) можно осуществить по схеме, приведённой на рис. 69.
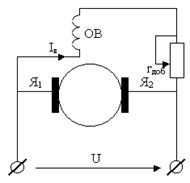
Рис. 69. Регулирование скорости ДПТ изменением сопротивления в цепи якоря
В цепь обмотки возбуждения включается добавочный реостат для регулирования тока возбуждения двигателя, напряжение на якоре остаётся при этом неизменным. В силу того, что Ф = К1*Iв, то при изменении Iв изменяется как скорость холостого хода, так и значение пускового момента Мп.
Следовательно при Ф1> Ф2 получим Мп1> Мп2 и w1<w2/ механические характеристики, соответствующие двум значениям потока возбуждения можно изобразить в виде рис. 70.
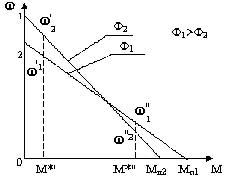
Рис. 70. Механические характеристики при полюсном управлении
Ввиду того, что механические характеристики, соответствующие различным значениям потока возбуждения пересекаются между собой, то при малых моментах нагрузки скорость может возрастать с уменьшением потока, а при больших –падать.
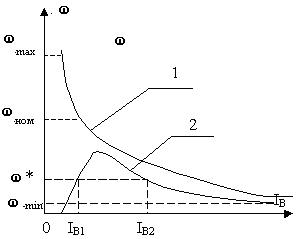
Рис. 71. Регулировочные характеристики при полюсном управлении
Случай идеального холостого хода представлен на кривой 1. Теоретически скорость вращения при Ф = 0 должна была бы возрасти до ∞, но в режиме реального холостого хода имеется определённый механический момент на валу машины М0, при котором скорость холостого хода ограничена величиной nmax. Тем не менее в режиме реального холостого хода скорость двигателя может в несколько раз превысить номинальную скорость, что может привести к механическому разрушению (или разносу) двигателя. Поэтому при таком способе регулирования скорости надо исключить возможность работы двигателя в режиме холостого хода.
Бесконечно большое увеличение тока возбуждения также не приведёт к снижению скорости двигателя до 0 при холостом ходе, т.к. при определённых токах возбуждения имеет место насыщение магнитной цепи машины и увеличение тока возбуждения уже не приводит к увеличению потока Ф. Обычно при таком способе регулирования отношение ωmax/ωmin = 2-5 и регулировочная характеристика имеет вид, представленный кривой 2. Этот способ регулирования скорости применяют, если M>0,5Mп, что исключает возможность разноса двигателя и неоднозначность регулировочной характеристики.
6.6. Механические характеристики ДПТ с последовательным и смешанным возбуждением
В ДПТ с последовательным возбуждением поток возбуждения создаётся током якоря машины, для чего обмотка возбуждения и якорь двигателя включаются последовательно относительно источника питания, как показано на схеме рис. 72.
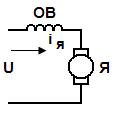
Рис. 72. ДПТ с последовательным возбуждением
Обычно при токах якоря Iя < 0,9 Iном магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения. При больших токах якоря Iя > Iном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным.
Подставив в уравнение
![]()
значение R=Rя+Rв значение M=С*Ф*I и значение Ф=К1*I, получим
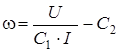 ,
,
причем M=С3*I2. Здесь С1, С2, С3 – постоянные коэффициенты.
Поскольку в установившемся режиме М = Мн, тогда

и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок М < Мн принимает вид (рис. 73.)
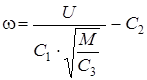 .
.
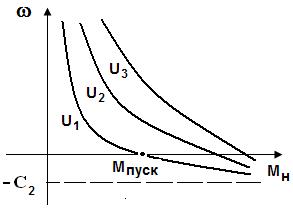
Рис. 73. Механические характеристики ДПТ с последовательным возбуждением
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает этим двигателям хорошие пусковые свойства, т. е. большой пусковой момент при сравнительно малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных и тяговых приводах. Недопустимо, чтобы ДПТ с последовательным возбуждением работал в режиме холостого хода или с нагрузкой, менее 25% от номинальной – это приводит к разносу двигателя. Регулирование скорости вращения в этом случае, производится теми же способами, что и для двигателей с независимым возбуждением.
В ДПТ со смешанным возбуждением магнитный поток Ф создаётся в результате совместного действия двух обмоток возбуждения – параллельной и последовательной (рис.74), поэтому механическая характеристика (кривая 3 на рис. 75) располагается между характеристиками двигателя с независимым возбуждением (кривая 1) и двигателя с последовательным возбуждением (кривая 2).
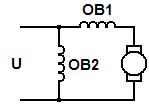
Рис. 74. ДПТ со смешанным возбуждением
В зависимости от соотношения намагничивающих сил параллельной и последовательной обмоток возбуждения можно приблизить кривую 3 либо к кривой 2, либо к кривой 1. Достоинство двигателя со смешанным возбуждением является то, что он обладает мягкой механической характеристикой , но может работать и в режиме холостого хода. Рис. 75.
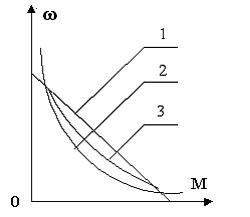
Рис. 75. Механические характеристики ДПТ
7. Асинхронные двигатели
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 900 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 900 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 900. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 900 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ - частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
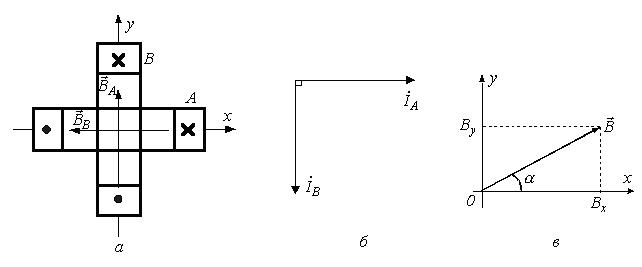
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-900).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:

Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен![]() ,
,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
 , откуда a=wt.
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой ![]() , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю.
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
![]() ;
; ![]() ;
; ![]() .
.
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ![]() ,
,
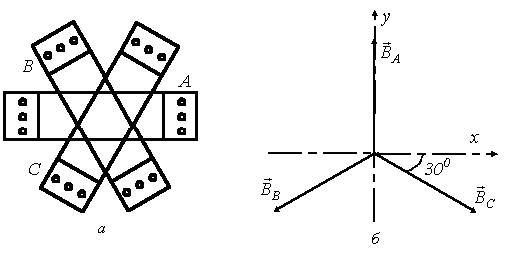
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
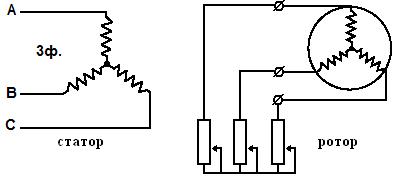
Рис. 72. Трехфазный АД с фазным ротором
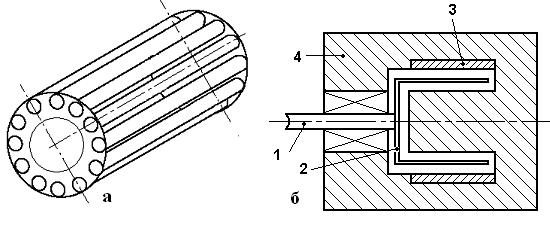
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
7.2. Статические характеристики асинхронного двигателя
Под действием электромагнитной индукции в обмотках или элементах короткозамкнутого ротора ("беличьей клетке") индуктируются вторичные ЭДС и токи частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный момент M, что приводит к вращению ротора с частотой ω1. Рассмотрим для примера модель двигателя, в которой число пар полюсов p=1.
Частота индуцируемых во вторичной обмотке (роторе) ЭДС и токов ω2 зависит от скольжения S:
![]() .
.
Эквивалентная схема цепи ротора в рабочем режиме показана на Рис 74.
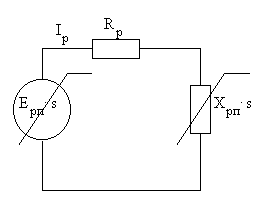
Рис. 74. Схема цепи ротора АД
Она содержит изменяемый источник ЭДС Eрп·S и изменяемое индуктивное сопротивление xр=xрп·S. Они изменяются при изменении скольжения S (частоты вращения), а активное сопротивление Rp не изменяется.
Мы можем привести рабочий режим двигателя к режиму неподвижного ротора и рассматривать асинхронную машину как обычный трансформатор с неподвижными обмотками; в результате преобразования получаем эквивалентную схему. АД, с учетом параметров обмотки статора.
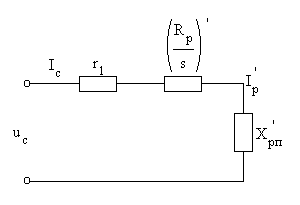
Рис. 75. Эквивалентная электрическая схема АД
На схеме обозначены: ![]() - приведенные сопротивления, n- коэффициент трансформации, а r1- активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
- приведенные сопротивления, n- коэффициент трансформации, а r1- активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
Выражение для вращающегося момента можем получить из энергетического уравнения M·ω1= M·ω+m1·Ip2·Rp, где m1- количество фаз. Левая часть уравнения - электромагнитная мощность, а правая - механическая плюс электрическая мощности.
Подставляя сюда выражения для тока ротора, получим аналитическое выражение для электромагнитного момента и, если пренебречь активным сопротивлением обмотки статора, получается уравнение Клосса, отражающее зависимость электромагнитного момента от скольжения. Выражение для момента двигателя представлено через параметры критической точки:
 .
.
Скольжение, соответствующее максимальному моменту, называется критическим и обозначается SK или SM.
Критическое скольжение за зависит от соотношение активного и индуктивного сопротивлений ротора. При r1=0 получим  и
и ![]() .
.
Вид зависимости электромагнитного момента и тока ротора от скольжения показан на. рис. 76.
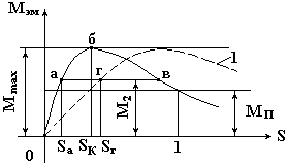
Рис. 76. Зависимость электромагнитного момента АД от скольжения
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рис. 76 имеются две точки, для которых справедливо равенство Мэм = М2; это точки а и в.
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть - областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным. Еще выводы:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений;
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U - const, w1 - const. На рис. 77 изображена типичная механическая характеристика асинхронного двигателя.
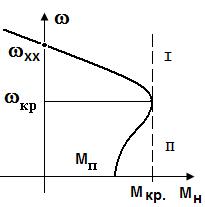
Рис. 77. Механическая характеристика асинхронного двигателя
На механической характеристике АД можно выделить два участка, которые разделены значением Мкр:
- режим устойчивой работы,
- режим неустойчивой работы.
Для каждого двигателя есть свое значение Мкр. При работе двигателя на первом участке Мкр.< Мн<0. и двигатель может развить вращающий момент, компенсирующий момент нагрузки. При работе двигателя на втором участке Мкр.> Мн происходит торможение и двигатель останавливается.
Различают 3 статических режима работы:
- Двигательный. В этом режиме направление вращения ротора и поля совпадают и . wp<w.
- Режим генераторного торможения. В этом режиме направление вращения ротора и поля совпадают, но . wp>w. Это возможно, если момент нагрузки поменяет знак. Двигатель не потребляет, а отдает энергию.
- Режим торможения противовключением. Реализуется, если в обмотке управления изменится фаза на 1800, после этого вращающий момент поменяет знак и будет тормозить ротор.
7.3. Управление асинхронными двигателями
Есть различные способы управления асинхронными двигателями:
- параметрическое управления трехфазными асинхронными двигателями.
- симметричное частотное управление,
- несимметричное амплитудно–фазовое управление,
7.3.1. Управление трехфазными асинхронными двигателями
1. Рассмотрим сначала способы управления трехфазными асинхронными двигателями. Первый способ используется для двигателей с фазным ротором. Критическое скольжение Skr определяется активным сопротивлением ротора Rr. Если Rr изменять, то будет изменяться наклон механической характеристики и соответственно скорость вращения ротора. Рис.78..
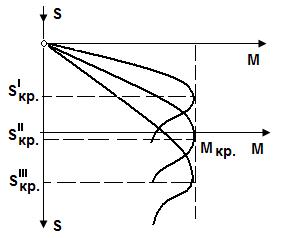
Рис. 78. Механическая характеристика асинхронного двигателя
Такой способ используется при пуске двигателя под нагрузкой, когда желательно, чтобы пусковой момент был максимальным. Для регулирования он применяется редко, т. к. велики тепловые потери в роторной цепи. Другим способом регулирования скорости является изменение напряжения на статоре, для АД вращающий момент изменяется пропорционально квадрату напряжения. При этом изменение напряжения питания мало влияет на частоту вращения ротора на рабочем участке и диапазон управления напряжением весьма ограничен.
2. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частотном управлении.. Изменяя частоту вращения поля ω1, можно изменять частоту вращения ротора ω при этом желательно, чтобы. жесткость характеристики не изменялась. Для этого одновременно с частотой, изменяют напряжение питания Uc так, чтобы их отношение оставалось постоянным Uc/w1=const.
Такое управление называется пропорциональным частотным управлением. Вид механических характеристик при пропорциональном управлении показан на рис. 79.
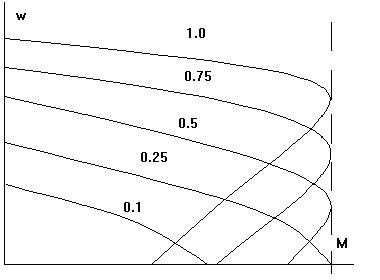
Рис. 79. Частотное управление асинхронным двигателем
При симметричном частотном управлении требуется специальное устройство преобразователь частоты, формирующий на выходе синусоидальный сигнал с изменяемой частотой w. Поле при этом управлении круговое, амплитуды на обмотках равны. Диапазон частот должен быть ограничен, так как при низких частотах падает индуктивное сопротивление обмоток и сильно растет ток, для высоких частот тоже существуют конструктивные и электрические ограничения. Поэтому при частотном управлении на самом деле идет управление по двум параметрам: частоте и амплитуде.
Функциональная схема частотного управления представлена на. на рис. 80. Она состоит из управляемого выпрямителя УВ, преобразующего напряжение переменного тока частотой 50 Гц в напряжение постоянного тока Uп, величина которого может регулироваться устройством управления УУ. Автономный инвертор АИ преобразует напряжение Uп в трехфазное напряжение изменяемой частоты f1. Управляющее устройство, изменяя частоту f1в в зависимости от задания ωз, изменяет также и напряжение Uп так, чтобы их отношение оставалось постоянным. Система управления может иметь обратную связь по скорости вращения через тахогенератор ТГ.
Более совершенным, чем пропорциональное управление, является частотно-токовое управление, при котором контролируется, кроме частоты вращения, ток якоря от датчика, что позволяет оставлять постоянным поток при изменении частоты f1 и нагрузки.
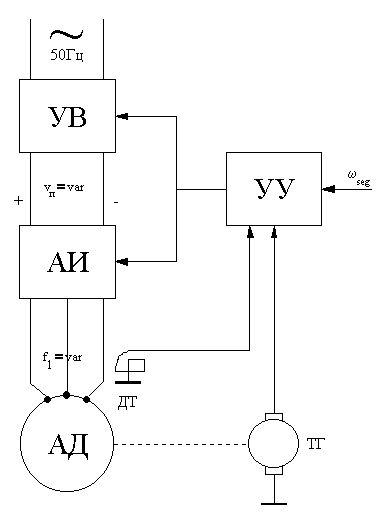
Рис. 80. Функциональная схема частотного управления асинхронным двигателем
7.3.2. Управление двухфазными асинхронными двигателями
В исполнительных приводах малой мощности широко в основном используются управляемые и неуправляемые двухфазные асинхронные двигатели. Эти , двигатели имеют две обмотки: одна включается в сеть непосредственно и называется обмоткой возбуждения (главной). На обмотку управления (вспомогательную), сдвинутую на статоре на90o градусов напряжение подается через фазосдвигающий элемент. Ротор всегда короткозамкнутый.
При таком способе управления есть разные варианты: амплитудное, фазовое и амплитудно–фазовое управление. При этих способах. на второй обмотке можно менять амплитуду напряжения, его фазу или оба параметра одновременно. При этом поле превращается из кругового в эллиптическое. При этом наряду с напряжениями и токами прямой последовательности фаз, создающими двигательный режим, возникает напряжение и токи обратной последовательности, вызывающие торможение. Таким образом, меняя степень асимметрии, можно регулировать скорость двигателя. Рис.81.
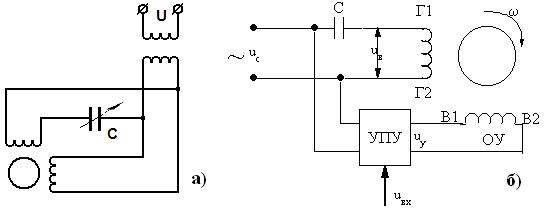
Рис. 81. Конденсаторный и управляемый двухфазные АД
При Uy=0, получим пульсирующее поле и w=0. Наиболее распространенным способом является конденсаторное управление. Чаще всего используется амплитудное несимметричное управление, когда UB=UC, а Uγ=α·Uc, где α меняется от 0 до 1. Можно получить выражения для вращающего момента при амплитудном управлении, аналогичное уравнению Клосса.
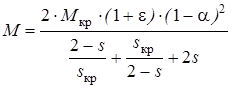
При симметрии напряжений, когда α=1, из этого уравнения получим нормальное уравнение выражение для асинхронной машины Так как в двухфазных двигателях SM>1, то при α=0, т.е. при отключении обмотки управления двигатель тормозится, и останавливается при S=1.
Механические и регулировочные характеристики асинхронного двигателя. нелинейны. Их заменяют в рабочей области прямыми:
M = b1U-b2w.
Коэффициенты b1 и b2 определяют по паспортным данным АД. В момент пуска М =Мп, w = 0, поэтому
Мп = b1∙Un и b1 = Мн/Un.
Для номинального режима аналогично получим, учитывая , что PN = MN∙wN,
MN = Мп -b2∙ wN и b2∙ = (Мп -MN)/wN.
Мы получим уравнение линеаризованной механической характеристики :
w = (b1/ b2)∙U-M/ b2.
Механические и регулировочные характеристики асинхронного двигателя показаны на рис. 82.
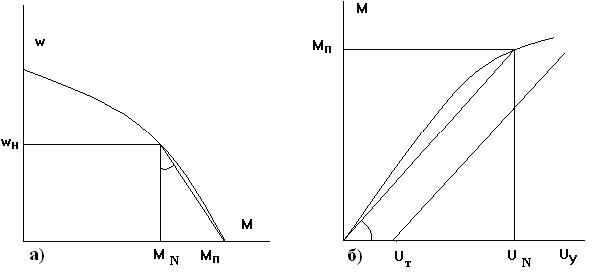
Рис. 82. Механическая и регулировочная характеристики двухфазного АД
После линеаризации асинхронный двигатель может быть представлен как линейная динамическая система, описываемая следующими уравнениями (bw = b1, bu = b2):
![]()
![]()
![]() .
.
Рассмотрим случай, когда сухое трение отсутствует и есть только скоростное трение, то есть МТ = F∙w. Заменив .![]() и проведя преобразования получим:
и проведя преобразования получим:
 .
.
Отсюда выражение для передаточной функции
 , где коэффициент передачи
, где коэффициент передачи  и электромеханическая постоянная времени
и электромеханическая постоянная времени 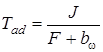
Этой передаточной функции соответствует структурная схема и переходный процесс, представленные на рис. 83.
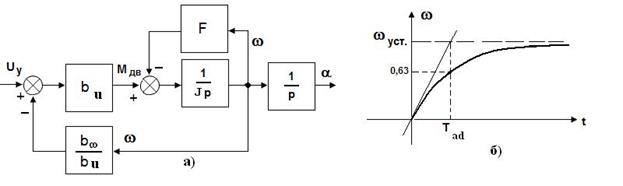
Рис. 83. Структурная схема и переходный процесс АД
8. Синхронные двигатели
8.1. Принцип действия и виды синхронных двигателей
Синхронные двигатели СД небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол - двигатель совершает шаг. К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения - это так называемые вентильные двигатели.
Статор синхронной машины выполнен аналогично статору асинхронной машины. На нем расположена ![]() -фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
-фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
|
nр = nс= (60f)/p. |
(3.1.2) |
Где f – частота напряжения статора, а p – число пар полюсов.
1. У СД с обмоткой на роторе ротор состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы таких машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). Электромагнитная схема синхронной машины имеет вид (рис90):
Рис. 90. Электромагнитная схема СД (а), схема ее включения (б), характеристика (с)
Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6.
2. Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
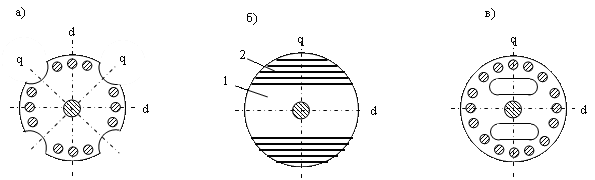
Рис. 91. Роторы синхронных реактивных микродвигателей
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. Рис 92..
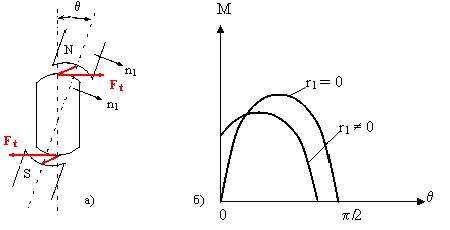
Рис. 92. Принцип действия синхронного реактивного двигателя
Электромагнитный момент синхронного реактивного двигателя без учета активного сопротивления статора r1 выражается следующей зависимостью:
|
|
(3.2.1) |
где xd и xq - синхронные индуктивные сопротивления по продольной и поперечной осям машины. Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе. Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3...0,4, а мощностью до 10 ватт - менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
3. СД постоянными магнитами. По способу пуска эти двигатели делятся: на самозапускающиеся двигатели и двигатели с асинхронным пуском. Самозапускающиеся двигатели выполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении, например . клювообразные полюса статора -. КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пуском имеют на роторе короткозамкнутую обмотку типа "беличьей клетки", которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
4. Пуск и вход в синхронизм СД.
Недостатком СД является то, что управление скоростью возможно только через изменение частоты вращения поля, а следовательно, частоты питающего напряжения. Недостатком СД является то, что двигатель должен войти в синхронизм, недостатком является также малый пусковой момент, поэтому, чтобы запустить двигатель, необходимы дополнительные меры. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они или снабжаются пусковой обмоткой или используется схема включения СД с асинхронным запуском. Рис. 93.
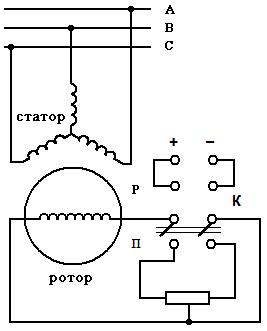
Рис. 93. Схема включения СД с асинхронным запуском
Здесь, на роторе находится обмотка, которая в момент запуска замыкается либо накоротко, либо на внешнее сопротивление. В этом случае двигатель ведет себя как асинхронный и у него есть значительный пусковой момент. Когда ротор разгоняется до скорости, близкой к скорости поля, ключ переключается в другое положение и на ротор подается постоянное напряжение. Такой СД при пуске асинхронно разгоняется до 90-95% от скорости поля, затем входит в синхронизацию и далее ведет себя, как синхронный. Есть другая модификация, у которой на роторе есть дополнительная короткозамкнутая обмотка, например, беличья клетка. Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший скорости близкой к синхронной должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому момент входа в синхронизм в сильной степени зависит от момента инерции ротора и момента нагрузки.
8.2. Специальные синхронные двигатели
В автоматике используется СД малой мощности, от 0,1 до 500 Вт, Есть различные типы СД: редукторные, гистерезисные, бесконтактные, различные виды шаговых двигателей.
8.2.1. Гистерезисные двигатели
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.94).
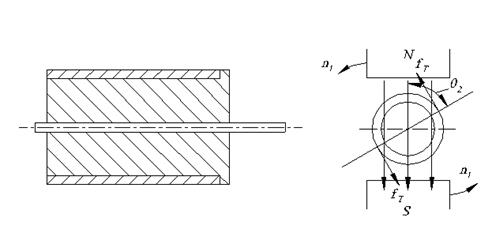
Рис. 94. Ротор гистерезисного двигателя и схема возникновения гистерезисного момента
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Так как ротор выполнен из магнита твердого материала, то элементарные магнитики перемагничиваются не мгновенно, а с отставанием из-за гистерезиса, это и создает гистерезисный момент. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше Мг, то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Движущий момент ротора создается двумя составляющими: моментом вихревых токов и гистерезисным моментом. Рис. 95.
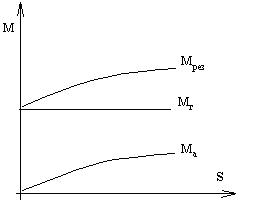
Рис. 95. Механическая характеристика гистерезисного двигателя
Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
![]()
![]()
![]() ,
,
где П2Н - потери на перемагничивание ротора при неподвижном роторе; Пвихр.Н - потери на вихревые токи при неподвижном роторе;
Двигатель используется в приводах небольшой мощности до 2000 Вт, частота f=50, 400 и 500 Гц.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, значительный пусковой момент, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки, значительный нагрев ротора.
8.2.2. Шаговые двигатели
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по числу фаз и типу магнитных системна ШД с активным ротором (с постоянными магнитами), ШД реактивного типа и индукторные.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
1. Шаговые двигатели с активным ротором. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Ротор обычно представляет собой многополюсную звездочку из специального сплава. Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Рассмотрим принцип действия простейшего двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. При включении фазы под постоянное напряжение (условно положительной полярности) вектор намагничивающей силы НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q - угол между осью ротора и вектором НС. Рис. 96.
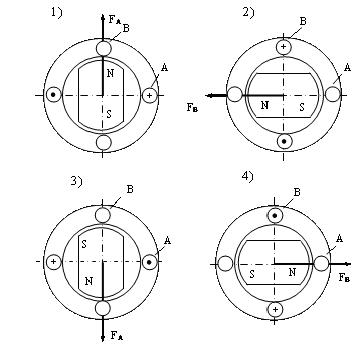
Рис. 96. Принцип работы ШД
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 96, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт). При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн = arcsin(Mн/Mmax).
В зависимости от типа электронного коммутатора управление ШД может быть:
- одноплярным или разнополярным;
- симметричным или несимметричным;
- потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n при разных способах коммутации может быть равно 1, 2, 4m, где m - число фаз: В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями): a = 360/pn.
ШД с активным ротором удается выполнить с шагом до 15о. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
2. Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 - 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и у обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Индукторные (гибридные) шаговые двигатели. совмещают преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага).
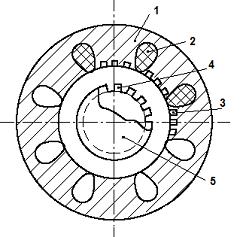
Рис. 96. Конструкция реактивного ШД
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
3. Режимы работы ШД.
1. Статический режим – это режим, при котором ротор фиксируется в одной из позиций, а по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле.
2. Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю.
3. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма. При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
4. Переходный режим - это основной эксплуатационный режим работы ШД. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Основное требование к ШД в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов.
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.97). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельную механическую характеристику рассматривают обычно при f>f0.
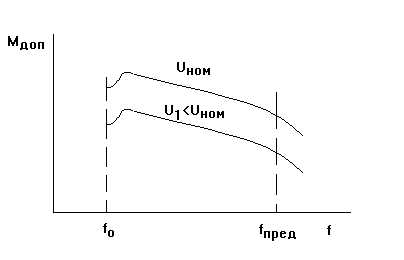
Рис. 97. Механические характеристики ШД
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр. Частота приземистости является важным показателем переходного режима ШД Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения
8.3. Бесконтактные двигатели переменного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
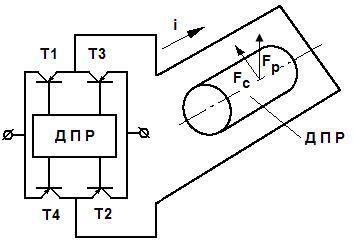
Рис. 98. Состав бесконтактного двигателя постоянного тока
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
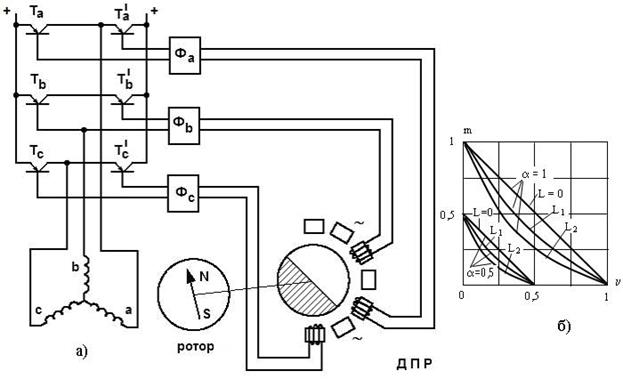
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
9. Электромагнитные устройства автоматики
9.1. Электромагнитное реле постоянного и переменного тока
9.1.1. Реле. Общие сведения
Релейный элемент - переключательное устройство с двумя или более состояниями устойчивого равновесия, каждое из которых может скачком сменяться другим под влиянием внешнего воздействия (управления).
Реле – устройство для автоматической коммутации электрических цепей по сигналу управления. Реле в системах управления часто являются одновременно усилителями и управляющими элементами для электродвигателей и исполнительных устройств. Электрическое реле в общем случае является промежуточным элементом, приводящим в действие одну или несколько управляемых электрических цепей
Основными параметрами, характеризующими работу реле, являются мощность срабатывания, мощность управления,. время срабатывания.
а) Мощность срабатывания:Рср (Вт) - это минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для его надежного срабатывания, т.е. приведения в действие управляющей цепи. Мощность срабатывания определяется общими электрическими и конструктивными параметрами реле.
б) Мощность управления: Рупр. (Вт) - это максимальная величина электрической мощности, коммутируемая в управляемой цепи. Рупр. определяется параметрами контактов реле, переключающих управляемую цепь. Выбор типа реле производится на основании значений Рср и Рупр, т.к. эти параметры постоянны для определенных конструкций реле.
в) Время срабатывания: Tср (сек) - интервал времени от момента поступления сигнала из управляющей цепи до замыкания контактов реле.
г) Допустимая разрывная мощность Рр (Вт) определяется для сильноточных реле, как мощность, разрываемая контактами при определенном токе или напряжении без образования устойчивой электрической дуги.
9.1.2. Основные этапы работы реле
Вследствие инерционности управляющей цепи и реле в целом входной ток реле возрастает и убывает не мгновенно, а по некоторой кривой. В связи с этим различают следующие этапы работы реле: срабатывание реле, работа реле, возврат реле. рассмотрим их на примере работы электромагнитного реле постоянного тока.
В реле за счет индуктивности катушки ток нарастает или убывает не мгновенно, а постепенно по некоторой кривой. Работа реле складывается из различных временных интервалов: рис. 100.
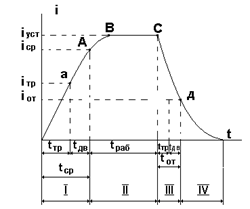
Рис. 100. Временная диаграмма работы реле
1. Этап срабатывания реле состоит из двух временных интервалов: времени трогания tТР и время движения якоря tДВ. Тогда tСР = tДВ + iТР.
2. Этап работы реле тоже включает два участка: на участке А-B после срабатывания реле ток продолжает увеличиваться до достижения установившегося значения, чтобы обеспечить надежное притяжения якоря к сердечнику, исключающее вибрацию якоря, на участке B-C величина тока остается неизменной.
3. Этап возврата реле тоже включает два участка: участок отпускания реле С-Д (tотп),. участок возврата в исходное состояние (tдв).
У реле часто используют следующие параметры.
Кb - коэффициент возврата - это отношение тока отпускания к току срабатывания (обычно Kb=0,4 - 0,8):
![]() .
.
КЗАП - коэффициент запаса реле по срабатыванию - это отношение установившегося тока iУСТ к величине тока срабатывания iСР (показывает надежность работы реле).
КЗАП = iУСТ/iСР.
Коэффициент управления: Купр- это величина характеризующая отношение Рупр к Рср реле. Если реле рассматривать как усилитель, то это коэффициент усиления по мощности.
9.1.3. Типы реле
Реле, применяемое в системах автоматики, можно классифицировать по различным принципам.
1) по назначению (управления, защиты и сигнализации);
2) по принципу действия:
а) электромеханические, электромагнитные нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические;
б) магнитные бесконтактные;
в) электронные;
г) фотоэлектронные;
д) другие.
3) по замеряемой величине:
а) электрические: тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности;
б) механические: силы, давления, скорости, перемещения, уровня, объема;
в) тепловые: температуры, количества тепла;
г) времени и др.
4) по мощности управления:
а) маломощные с мощностью управления,
;
б) средней мощности,
;
в) мощные, Рупр≥10Вт.
5) по времени срабатывания:
а) безинерционные
;
б) быстродействующие
;
в) замедленные tср = (0,15¼1) cек
;
г) реле времени
.
Наиболее распространенными реле являются электромеханические, в которых изменение входной электрической величины вызывает механическое перемещение подвижной части реле (якоря), приводящее к замыканию или размыканию контактов реле. Наиболее широкое применение в устройствах автоматики, телемеханики и в вычислительной технике нашли электромагнитные реле.
9.1.4. Электромагнитное реле постоянного тока
Электромагнитные реле по роду используемого тока делятся на реле постоянного и переменного тока. Реле постоянного тока делятся на нейтральные и поляризованные.
Электромагнитное нейтральное реле
Нейтральные реле одинаково реагируют на постоянный ток обоих направлений, протекающий по его обмотке, т.е. усилие на якоре не зависит от направления тока в обмотке реле. По характеру движения якоря электромагнитные нейтральные реле делятся на два типа: с угловым движением якоря (рис. 101)и с втяжным якорем.
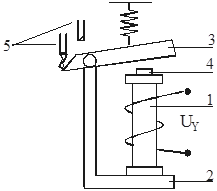
Рис. 101. Электромагнитное нейтральное реле постоянного тока
1 - сердечник с катушкой; 2 - основание (или ярмо); 3 - якорь (или коромысло); 4 - штифт; 5 - система контактов.
При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины. При этом размыкающие контакты РК замкнуты, а замыкающие контакты ЗК - разомкнуты. При подаче тока в обмотку создается магнитный поток, который, проходя через сердечник, ярмо, якорь и воздушный зазор dк(о) создает магнитное усилие, притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее так, что контакты ЗК замыкаются, а контакты РК размыкаются.
Для малых токов в устройствах телемеханики, связи и сигнализации применяются маломощные контакты, представляющие собой плоские пружины из фосфоритной бронзы или нейзильбера с контактными наклепками из серебра и вольфрама, иногда из золота, палладия, платины и ее сплавов. Применяются точечные или плоско - цилиндрические наклепки .
Для средних токов (0,5-5А) применяются твердые и тугоплавкие металлы и их сплавы: вольфрам, платина - иридий, вольфрам - молибден, золото - палладий, вольфрам – платина - иридий.
Для больших токов применяются контакты из меди или из композиций (механических смесей), изготовленных спеканием порошков (металлокерамика). Для средних и больших токов контакты, используются контакты линейного и плоскостного типа.
Тяговая и механические характеристики реле
В процессе срабатывания реле изменяется длина воздушного зазора, а значит, изменяется электромагнитное усилие на якоре. Зависимость электромагнитного усилия от величины воздушного зазора Fэ = f(d) между якорем и сердечником называется тяговой характеристикой реле.
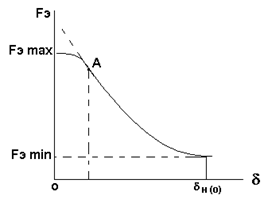
Рис. 102. Тяговая характеристика реле
Если пренебречь магнитным сопротивлением стальных элементов магнитопровода, то тяговая характеристика должна иметь форму гиперболы, но магнитное сопротивление воздушного зазора Rмd при малых значениях зазора уменьшается и становится сравнимым с..сопротивлением магнитопровода Rмст. Поэтому электромагнитное усилие Fэ не может иметь бесконечно большое значение, оно достигает некоторого Fэ.mах. При больших значениях зазора Rмd >> Rмст электромагнитное усилие имеет значение Fэ.min. После отключения обмотки реле магнитопровод сохраняет некоторое намагничивание и при ![]() возможно залипание якоря, для исключения его применяют немагнитный штифт.
возможно залипание якоря, для исключения его применяют немагнитный штифт.
Работа электромагнитного реле сводится к замыканию и размыканию контактных пружин, количество которых в разных реле колеблется в пределах 2-16 и более. Перемещению якоря по направлению к сердечнику в процессе притяжения противодействуют силы упругости возвратной пружины и контактных пружины. При разных положениях якоря эти силы различны, т.е. величина противодействующих сил зависит от величины воздушного зазора ![]() . Зависимость механических (противодействующих) сил от величины зазора между якорем и сердечником называется механической характеристикой реле Fэ = f(d). Рис. 103.
. Зависимость механических (противодействующих) сил от величины зазора между якорем и сердечником называется механической характеристикой реле Fэ = f(d). Рис. 103.
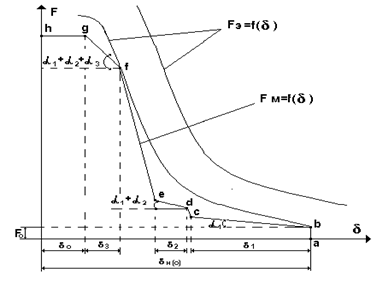
Рис. 103. Механическая и тяговые характеристики реле
В процессе работы реле якорь сначала преодолевает натяжение возвратной пружины. Участок аb характеризует усилие, действующего на якорь, чтобы сдвинуть его из начального положения. Участок bс - это ход якоря до первой контактной пружины. На участке cd якорь преодолевает совместное сопротивление возвратной спирали и нижней контактной пружины и т. д.
Тяговая характеристика должна располагаться выше механической, оптимально, если они касаются в одной точке.
Если коммутируемая цепь достаточно мощная, то процесс размыкания протекает значительно сложнее, чем процесс первичной коммутации (возникающая ЭДС самоиндукции стремится сохранить значение тока коммутируемой цепи). Этот процесс может сопровождаться возникновением искрового или дугового разряда. Дуга сильно разрушает контакты. Для преодоления возникновения дугового режима необходимо использовать или увеличение активного сопротивления или специальные конструктивные методы:
Поляризованное электромагнитное реле
Это такие реле, у которых направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация таких реле осуществляется при помощи постоянного магнита. Существует много конструктивных разновидностей поляризованных систем, по конфигурации магнитной цепи они делятся на: дифференциальные и мостовые. Существует 3 типа поляризованного реле в зависимости от настройки контактов:
- реле двухпозиционное;
- реле двухпозиционное с преобладанием (влево или вправо);
- трехпозиционное реле (реле с зоной нечувствительности).
Принцип действия двухпозиционного поляризованного реле поясняет схема на рис. 104.
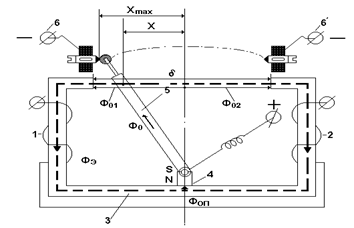
Рис. 104. Дифференциальное поляризованное реле: 1 и 2 - намагничивающие катушки; 3 - ярмо; 4 - постоянный магнит; 5 - якорь; 6 и 6¢- контакты.
Намагничивающие катушки 1 и 2- создают в ярме 3 магнитный поток Фэ (рабочий). Постоянный магнит 4 создает постоянный магнитный поток Фоп. Если якорь находится в строго симметричном нейтральном положении, то имеет место разделение поляризующего магнитного потока Фоп на две равные части: Фо1 и Фо2. Если управляющего сигнала нет, нет и рабочего потока обмоток Фэ. На якорь в этот момент действуют два равных и противоположных потока Фо1 и Фо2., поэтому тяговое усилие, равно нулю.
При появлении тока в обмотках реле в зависимости от полярности управляющего сигнала рабочий поток Фэ вычитается из потока Фо1 и прибавляется к потоку Фо2 или наоборот. Суммарный поток через якорь и тяговое усилие становится не нулевым. В зависимости от полярности напряжения якорь перекинется слева на право или наоборот. Изменение направления тягового усилия при изменении полярности тока в рабочей обмотке происходит из-за того, что изменяется направление рабочего потока относительно поляризующего Фоп..
Достоинства: высокая чувствительность (мощность срабатывания ![]() Вт); большой коэффициент управления; малое время срабатывания (единиц миллисекунд).
Вт); большой коэффициент управления; малое время срабатывания (единиц миллисекунд).
Недостатки: сложность конструкции; большие габариты, вес и стоимость.
9.1.5. Электромагнитное реле переменного тока
Электромагнитное реле переменного тока отличается от электромагнитного реле постоянного тока тем, что непосредственно подключается к сети, т.е. Uм(t)=Uм sin(ωt), f = 50-400 Гц. При подаче в обмотку реле переменного тока якорь будет притягиваться к сердечнику так же, как и при постоянном токе, т.к. электромагнитное (тяговое) усилие пропорционально квадрату намагничивающей силы, а стало быть, и квадрату тока в обмотке, т.е. знак тягового усилия не зависит от направления тока и останется неизменным.
![]() ,
,
Ток в обмотке электромагнита переменный, значит магнитный поток ![]() , созданный этим током в рабочем зазоре тоже переменный.
, созданный этим током в рабочем зазоре тоже переменный.
![]() , значит
, значит ![]()
![]() .
.
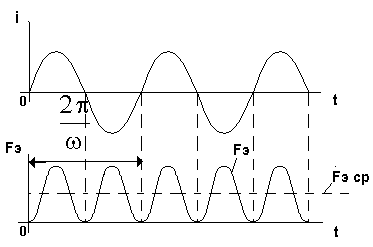
Рис. 105. Тяговое усилие электромагнитного реле переменного тока
Якорь притягивается к сердечнику под действием среднего значения электромагнитного усилия Fэср (постоянная составляющая).
Fэср = Fэmax/2.
При одинаковых размерах реле и равных значениях максимальной индукции, среднее значение электромагнитного усилия у реле переменного тока вдвое меньше, чем у реле постоянного тока. Из формулы для тягового усилия следует, что усилие меняется (пульсирует) с удвоенной частотой 2w, обращается в нуль дважды за период питающего входного напряжения. Следовательно, якорь реле будет вибрировать, периодически оттягиваться от сердечника возвратной пружиной, возникает износ якоря. Для преодоления данного эффекта используются дифференциальные сердечники, а также фазосдвигающие элементы, уменьшающие вероятность перехода магнитного потока через нуль.
Наиболее часто для устранения вибрации якоря переменного тока применяют использование расщепленного сердечника с короткозамкнутой (к.з.) обмоткой. Конец сердечника, обращенный к якорю, расщеплен (пропилен) на две части, на одну из которых надета к.з. обмотка - экран (один или несколько витков). Магнитопровод выполнен из отдельных листов для уменьшения потерь. Переменный магнитный поток Фосн основной обмотки, проходя через разрезанную часть сердечника, делится на две части: Ф1 (через неэкранированный) и Ф2 (через экранированную половину полюса). Поток Ф2 наводит в к.з. витке ЭДС, создает ток iкз , возникает магнитный поток Фкз, который воздействует на Ф2 и вызывает его отставание относительно потока Ф1 на угол ![]() . Результирующее тяговое усилие Fэ никогда не доходит до нуля, т.к. оба потока проходят через нуль в разные моменты времени.
. Результирующее тяговое усилие Fэ никогда не доходит до нуля, т.к. оба потока проходят через нуль в разные моменты времени.
![]() ,
,
Тяговое усилие все же содержит переменную составляющую, т.к. фазовый сдвиг не может быть равен ![]() из-за наличия активных потерь (j = 60°-80°).
из-за наличия активных потерь (j = 60°-80°).
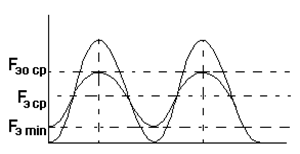
Рис. 106. Тяговое усилие реле с к.з. обмоткой
Fэо cр- среднее тяговое усилие без к.з. обмотки; Fэср- среднее тяговое усилие системы с расщепленным сердечником.
Для надежной работы реле необходимо, чтобы минимальное усилие Fэмin было как можно большим, т.к. эти усилия определяют допустимую нагрузку реле без вибрации.
Недостатки реле переменного тока: худшие параметры (меньшее электромагнитное усилие, меньшая чувствительность), сложность конструкции и дороговизна, применение специальных мер для устранения вибрации якоря.
Достоинство - непосредственное подключение к сети.
9.2. Контакторы и магнитные пускатели
9.2.1. Контакторы
Контактором называется электромагнитное реле с мощной контактной системой, для включения и отключения силовых цепей предназначенной в первую очередь для коммутации рабочих цепей электродвигателей. Главные контакты контакторов предназначены для работы в силовых цепях переменного тока промышленной частоты напряжением до 500 В. Главные контакты бывают, как замыкающими, так и размыкающими. Помимо главных контактов контакторы имеют дополнительные маломощные блок-контакты, которые используются для самоблокировки, включения удерживающих обмоток и коммутации дополнительных цепей. На схемах чтобы отличить главные контакты контактора от блок-контактов, их изображают более толстой линией.
Катушки контакторов используются для включения в цепи как переменного тока напряжением 127, 220 и 380 В, так и постоянного тока 24, 36, 110 или 220 В.
Контакторы постоянного тока предназначены для коммутации цепей постоянного тока и имеют обмотку, питающуюся, как правило, постоянным током. Контакторы переменного тока предназначены для коммутации цепей переменного тока; их обмотка питается, как правило, переменным напряжением. Контакторы большой мощности имеют дугогасительные средства. Конструкция и принцип действия контакторов переменного тока показана на рис.107.
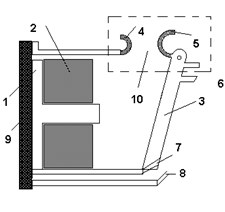
Рис. 107. Схема контактора переменного тока
На рисунке изображены следующие элементы: 1 - стальной сердечник; 2 - катушка; 3 - якорь; 4 - неподвижный контакт; 5 - подвижный контакт; 6 - пружина; 7 и 8 - вспомогательные блок-контакты; 9 - изолирующая основа; 10 - камера гашения.
При включении тока, в катушке, якорь притягивается к сердечнику и замыкает главные контакты и вспомогательные контакты, пружина обеспечивает надежное соприкосновение контактов. Вспомогательные блок-контакты служат для включения цепей других реле, сигнализация и т.д. При выключении катушки якорь под действием своего веса отпадает, размыкая контакты 4-5 и 7-8.
Схемы включения контакторов. На рисунке 108 и 109 изображены обычные схемы включения контакторов.
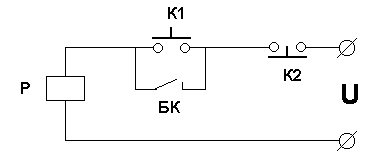
Рис. 108. Схема включения с самоблокировкой
При нажатии кнопки К1 - реле срабатывает и замыкающим контактом БК шунтирует К1. Поэтому при отпускании кнопки К1 цепь обмотки остается замкнутой. Для отключения реле достаточно нажать кнопку К2, реле обесточится и его контакты, шунтирующие К1 разомкнутся.
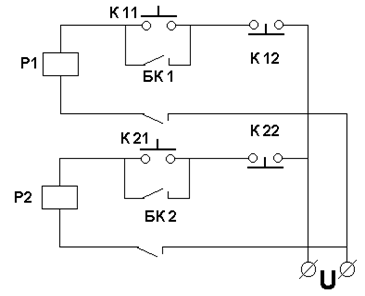
Рис. 109. Схема взаимной блокировки двух реле
Схема используется, когда необходимо исключить одновременную работу двух реле, это достигается введением в цепь обмотки одного реле размыкающих контактов другого.
Если ![]() , то при нажатии на К11 и К21 срабатывает только Р1 и своими контактами размыкает цепь реле Р2. Если срабатывает одновременно Р1 и Р2 система может выйти из строя. Большинство главных контактов у контакторов снабжено дугогасящими устройствами по принципу электромагнитного дутья или деионной решетки.
, то при нажатии на К11 и К21 срабатывает только Р1 и своими контактами размыкает цепь реле Р2. Если срабатывает одновременно Р1 и Р2 система может выйти из строя. Большинство главных контактов у контакторов снабжено дугогасящими устройствами по принципу электромагнитного дутья или деионной решетки.
Катушки контакторов, рассчитанных на питание постоянным током напряжением 110 или 220 В, потребляют мощность 20-30 Вт.
9.2.2. Магнитные пускатели
Магнитный пускатель - это один из видов контакторов, предназначенный для пуска и остановки двух и трехфазных асинхронных двигателей. По типу магнитные пускатели делятся на реверсивные; и нереверсивные
Рассмотрим работу пускателя в нереверсивной схеме управления электродвигателями переменного тока с коротко замкнутым ротором. Рис 110.
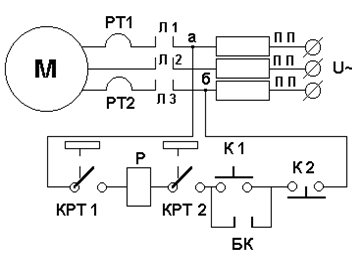
Рис. 110. Схема нереверсивного электродвигателя переменного тока с коротко замкнутым ротором
На рисунке изображены следующие элементы: Л1 – Л3 - главные контакты; БК - блок контакт; РТ1 и РТ2- биметаллические тепловые реле; К1- кнопка “ПУСК”; К2- кнопка “СТОП”; КРТ1 и КРТ2- контакты тепловых реле.
Контакт БК- служит для самоблокировки контактора после его срабатывания при нажатии кнопки К1;контакты РТ 1 и РТ2- для защиты двигателя от перегрузки.
При нажатии кнопки К1 образуется цепь: фаза (а) КРТ1 - втягивающая катушка контактора Р - КРТ2 - нажатая кнопка К1 - замкнутая кнопка К2 - фаза б. Когда через катушку контактора проходит ток, то мгновенно замыкаются главные контакты и блок контакты, в результате этого электродвигатель начинается вращаться. При замыкании блок контакта пусковая кнопка К1 шунтируется и может быть отпущена, т.к. ток в катушку реле проходит через блок контакт. При нажатии К2 цепь катушки обесточивается, линейные контакты и блок контакты размыкаются, электродвигатель останавливается. Тот же эффект будет при отключении напряжения в цепи главного тока при снижении его до 65% от номинального. Теперь магнитный пускатель самопроизвольно включиться не может, т.к. цепь катушки К разомкнута контактами К1 и БК. Вторичная подача напряжения в цепь головного тока не вызывает включения электродвигателя до тех пор, пока не будет вновь нажата кнопка К1, т.е. обесточивается нулевая защита. Через тепловые реле РТ1 и РТ2 - проходит весь ток электродвигателя. При нормальной нагрузке двигателя контакты реле КР1 и КРТ2 замкнуты. При перегрузке двигателя реле (одно или два) размыкают свои контакты, это вызывает обесточивание цепи катушки, Л1 и БК размыкаются, двигатель останавливается. Но тепловые реле обладают большей тепловой инерцией, и не могут защитить двигатель при коротком замыкании, поэтому включаются плавкие предохранители ПП.