2.1. Разделение по форме сигналов в асинхронных адресных системах
2.1. Разделение по форме сигналов в асинхронных адресных системах
Многоканальные автономные системы передача информации часто называют асинхронными адресными системами связи (ААСС), подчеркивая этим особенности их работы:
- абоненты работают асинхронно;
- связь осуществляется но принципу «каждый с каждым»;
- информация передается с использованием адресных сигналов, которые одновременно являются переносчиками информации и указывают, кому предназначено сообщение.
В ААСС обычно используются одноканальные передатчики, например, для связи с подвижными объектами. Здесь наиболее приемлем асинхронный принцип работы всех абонентов. Кроме того, абоненты системы имеют малый коэффициент активности, определяемый отношением среднего числа активных абонентов (работающих одновременно) к общему числу абонентов:![]() . Число необходимых сигналов, адресов определяется общим числом абонентов K и равно K при использовании противоположных сигналов или при пассивной паузе или 2K при использовании ортогональных сигналов. Основным отличительным свойством ААСС является наличие внутрисистемных помех, обусловленное тем, что на входе приемника кроме полезного сигнала присутствуют сигналы других абонентов. Эти сигналы называются мешаюшими.
. Число необходимых сигналов, адресов определяется общим числом абонентов K и равно K при использовании противоположных сигналов или при пассивной паузе или 2K при использовании ортогональных сигналов. Основным отличительным свойством ААСС является наличие внутрисистемных помех, обусловленное тем, что на входе приемника кроме полезного сигнала присутствуют сигналы других абонентов. Эти сигналы называются мешаюшими.
Для ААСС важнейшей задачей является оценка уровня внутрисистемных помех, влияния их на требования к используемым сигналам, на достоверность передачи информации, а также оценке эффективности использования полосы частот канала. Далее подробно остановимся на рассмотрении этих задач.
Опенка внутрисистемных помех и их влияния на помехоустойчивость /2/. Предположим, что в системе работают одновременно kа абонентов. Сигналы всех этих абонентов присутствуют на входе приемника; из этих сигналов один будет полезным (на этот сигнал настроен приемник), а остальные (kа-1) сигналов будут мешающими. Предположим далее, что средние мощности сигналов всех абонентов на входе приемника будут одинаковыми и равными средней мощности полезного сигнале Рс. Тогда можно считать, что на входе приемника действует гауссовская помеха, средняя модность которой определяется суммарной мощностью мешающих сигналов:![]() . Если сигналы имеют равномерную спектральную плотность в общей полосе частот, то внутрисистемные помехи будут характеризоваться спектральной плотностью, равной
. Если сигналы имеют равномерную спектральную плотность в общей полосе частот, то внутрисистемные помехи будут характеризоваться спектральной плотностью, равной ![]() , и для оценки помехоустойчивости можно использовать формулу для средней вероятности ошибка оптимального приема при гауссовском белом шуме (1.7), но параметр h2 надо определять с учетом всех помех, действующих на входе приемника,
, и для оценки помехоустойчивости можно использовать формулу для средней вероятности ошибка оптимального приема при гауссовском белом шуме (1.7), но параметр h2 надо определять с учетом всех помех, действующих на входе приемника,
![]() , (2.1)
, (2.1)
где В – база сигнала.
Если ![]() и
и ![]() , т.е. внутрисистемные помехи по уровню превосходят шумы приемника, то
, т.е. внутрисистемные помехи по уровню превосходят шумы приемника, то ![]() и
и
![]() , (2.2)
, (2.2)
где γ=2 для противоположных сигналов, γ=1 для ортогональных сигналов и при пассивной паузе.
Режим работы ААСС с пассивной паузой следует пояснить.
При пассивной паузе каждый абонент излучает сигнал приблизительно с вероятностью 0,5, равной вероятности выдачи источником символа «1» (или «0»). При суммировании сигналов от kа абонентов фактически будут линейно складываться в каждый момент в среднем kа/2 сигналов, т.е. уровень помех будет в два раза меньше, что компенсирует коэффициент γ=1/2 в формуле (1.7) для пассивной паузы. В результате вероятность ошибки при учете только внутрисистемных помех будет одинаковой для пассивной паузы и ортогональных сигналов.
Таким образом, при заданном качестве передачи информации (h2 задано), при учете только внутрисистемных помех база сигнала должна быть в ![]() больше числа одновременно работающих абонентов
больше числа одновременно работающих абонентов
![]() . (2.3)
. (2.3)
Оценим влияние внутренних шумов. Обратимся к формуле (2.1), положив, что ![]() . Обозначив через
. Обозначив через ![]() значение параметра h2, обусловленное учетом только внутренних шумов, получим
значение параметра h2, обусловленное учетом только внутренних шумов, получим
 .
.
Обычно h2 задано, ![]() , тогда для обеспечения заданного качества передачи информации ка абонентами должны быть использованы сигналы с базой
, тогда для обеспечения заданного качества передачи информации ка абонентами должны быть использованы сигналы с базой
![]() . (2.4)
. (2.4)
Это выражение при ![]() преобразуется к виду
преобразуется к виду
![]() . (2.5)
. (2.5)
Наличие внутренних шумов приемника требует увеличения базы сигналов; относительное увеличение базы определяется только отношением параметров ![]() и
и ![]() и при
и при ![]() определяется формулой
определяется формулой
![]() .
.
Если увеличение базы сигналов невозможно, то для сохранения качества передачи информации потребуется уменьшение числа одновременно работающих абонентов. Относительное уменьшение числа активных абонентов также определяется отношением ![]() к
к ![]()
![]() .
.
Зависимость между базой сигналов, числом активных абонентов и величиной ![]() , при различном качестве передачи сообщений (h2 - разное) представлены на рис.2.1.
, при различном качестве передачи сообщений (h2 - разное) представлены на рис.2.1.
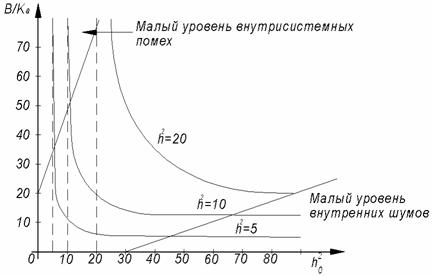
Рис.2.1. Зависимость базы сигналов В, числа активных абонентов ка от уровня внутренних шумов при различном качестве передачи
Эффективность использования общей полосы частот. В гл.1 методы объединения характеризовались спектральной ценой, которая определялась как увеличение полосы частот при многоканальной передаче по сравнению с одноканальной. Спектральная цена РКФ минимальна и равна 1, если в одноканальной системе используются широкополосные сигналы с той же базой.
Эффективность использования общей полосы частот канала /2/ характеризуется коэффициентом использования частот, определяемым как
![]() (2.6)
(2.6)
и показывающим, какую часть полосы канала занимает суммарная ширина спектра сообщений всех одновременно работающих абонентов kа.
Этот коэффициент имеет смысл вводить именно для ААСС, когда активность абонентов мала.
Асинхронный принцип связи можно реализовать и при ЧРК. В этом случае принцип работы «каждый с каждым» может быть реализован только при выделении каждому абоненту своего частотного канала, т.е. система должна быть с закрепленными частотами. Но одновременно будут работать небольшое число абонентов kа<<K, каждый абонент занимает полосу частот Fа, называемую абонентской, которая может быть шире ширины спектра сообщения Fa>>Fсооб . Обозначим ![]() . Тогда
. Тогда
![]() . (2.7)
. (2.7)
Для ЧРК ![]() ,
,
![]() . (2.8)
. (2.8)
При РКФ сигналы каждого абонента занимают всю полосу частот канала Fa=F, β=В и с учетом (2.3)
![]() . (2.9)
. (2.9)
Эффективность использования общей полосы частот при РКФ будет выше, чем при ЧРК, если ![]() , т.е.
, т.е.
![]() или
или ![]() . (2.10)
. (2.10)
Сравнивая (2.8) и (2.9), можно получить соотношение для определения базы сигнала, при которой РКФ будет более эффективно использовать общую полосу частот:
![]() .
.
Параметр β имеет смысл базы одноканального сигнала при ЧРК: ![]() .
.
Тогда ![]() можно определить как эквивалентную базу канального сигнала при РКФ. Можно говорить, что РКФ будет эффективнее использовать общую полосу частот по сравнению с ЧРК, если эквивалентная база одноканального сигнала при РКФ будет меньше базы одноканального сигнала при ЧРК:
можно определить как эквивалентную базу канального сигнала при РКФ. Можно говорить, что РКФ будет эффективнее использовать общую полосу частот по сравнению с ЧРК, если эквивалентная база одноканального сигнала при РКФ будет меньше базы одноканального сигнала при ЧРК:
![]() . (2.11)
. (2.11)
Эквивалентная база одноканального сигнала может быть меньше 1, что возможно при малой активности абонентов. Это можно показать, используя значение базы, полученное для заданного уровня внутрисистемных помех и определяемое формулой (2.3):
![]() . (2.12)
. (2.12)
При h2 =10, ![]() эквивалентная база одноканального сигнала
эквивалентная база одноканального сигнала ![]() .
.
При ЧРК база одноканального сигнала ![]() : при однополосной модуляции
: при однополосной модуляции![]() , при амплитудной модуляции
, при амплитудной модуляции ![]() , при частотной модуляции
, при частотной модуляции ![]() . Таким образом, соотношение (2.11) выполняется для практически интересных случаев (h2 =10,
. Таким образом, соотношение (2.11) выполняется для практически интересных случаев (h2 =10, ![]() ), и РКФ будет эффективнее использовать общую полосу частот, чем ЧРК.
), и РКФ будет эффективнее использовать общую полосу частот, чем ЧРК.
Поясним сказанное на примере многоканальной РТС, обеспечивающей обмен сообщениями между абонентами по принципу «каждый с каждым». Из общего количества 1000 обслуживаемых абонентов одновременно могут работать до 100 абонентов. Пусть абоненты передают двоичные сообщения со скоростью V=100 бит/с, т.е. ширина спектра сообщения равна приблизительно Fсооб=100 Гц.
Оценим коэффициент использования полосы частот для РТС с ЧРК и с РКФ. Пусть в случав ЧРК используется ЧМ и для каждого абонента отводится полоса Fа= 500 Гц. Общая полоса частот системы равна ![]() МГц. В среднем одновременно используется только часть полосы, необходимая для передачи сообщений 100 абонентами, т.е. 50 кГц. Коэффициент использования полосы в соответствии с (2.7) равен
МГц. В среднем одновременно используется только часть полосы, необходимая для передачи сообщений 100 абонентами, т.е. 50 кГц. Коэффициент использования полосы в соответствии с (2.7) равен
![]() .
.
В случае же РКФ выбор базы сигнала проведем о использованием выражения (2.3): при заданных значениях h2=10 и ка= 100, В=1000.
Полоса частот системы будет в базу В раз больше ширины спектра сообщения, т.е. F=BFсооб=0,1 МГц и
![]() ,
,
т.е. коэффициент использования полосы частот при РКФ в 5 раз больше чем при ЧРК.
Об эффективности использования полосы частот можно судить также по эквивалентной полосе частот, приходящейся на одно сообщение. При РФК в полосе частот F=0,1 МГц размещается 103 абонентов и эквивалентная полоса частот
![]() кГц
кГц
в 5 раз меньше, чем полоса частот, отведенная для передачи сообщения одного абонента при ЧРК.
Из этого примера видно, что РКФ требует для передачи информации в системе меньшей полосы частот, и за счет этого имеет место более эффективное использование радиоспектра.
2.2. Основные характеристики сигналов в РТС ПИ с РКФ
Сигналы с большой базой, используемые при РКФ, различаются между собой только по форме (по структуре). Их прием возможен с использованием корреляторов или согласованных фильтров /9, 16, 18/. Коррелятор строится по схеме, приведенной на рис.2.2.
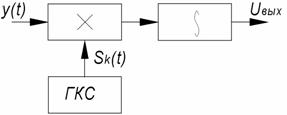
Рис.2.2. Структурная схема коррелятора
На вход коррелятора подается смесь полезного сигнала Sk(t), мешающих сигналов ![]() и шума n(t):
и шума n(t):
![]() . (2.13)
. (2.13)
Генератор копии сигнала формирует сигнал Sk(t), который совпадает по форме с полезным сигналом на входе приемника с точностью до фазы высокочастотного заполнения. Следует также подчеркнуть, что эти сигналы синхронизированы во времени. Такая ситуация характерна для когерентного приема. Мешающие сигналы других абонентов ![]() приходят на вход приемника со случайными амплитудами
приходят на вход приемника со случайными амплитудами ![]() и временем задержки
и временем задержки ![]() .
.
Обработка принимаемого сигнала (2.13) в приемном устройстве состоит, во-первых, в перемножении с копией сигнала Sk(t) и, во-вторых, в последующем интегрировании полученного произведения на интервале длительности сигнала Т. Можно записать
 . (2.14)
. (2.14)
В этом выражении, кроме полезной составляющей ![]() , равной энергии полезного сигнала на входе приемника, содержится шумовая составляющая
, равной энергии полезного сигнала на входе приемника, содержится шумовая составляющая ![]() и помеховая
и помеховая
![]() . (2.15)
. (2.15)
Помеховая составляющая характеризует внутрисистемные помехи и определяется значениями взаимной корреляционной функции между полезным и мешающим сигналами при случайной задержке τр:
![]() . (2.16)
. (2.16)
Однако в § 2.1 было определено, что помехоустойчивость определяется базой сигналов (2.2), но не зависит от их корреляционных функций. Это объясняется введенными там предположениям: внутрисистемные помехи нормализуются, а их спектральная плотность мощности в общей полосе частот принята равномерной. Ни то, ни другое предположение обычно не выполняется, и тогда корреляционные характеристики систем сигналов являются определяющими при решении вопроса о помехоустойчивости передачи информации в ААСС.
Следует обратить внимание, что выражение (2.16) определяет взаимные корреляционные функции (ВКФ). Именно характеристики ВКФ определяют помехоустойчивость связи. При этом асинхронный принцип работы абонентов предопределяет случайность времени задержки τр. Но ортогональность сигналов может обеспечиваться только в точке, т.е. при определенном временном сдвиге. При случайных сдвигах τр значение Rкр(τр), определяемое формулой (2.16), будет отличным от нуля. Поэтому в ААСС основной задачей является выбор ансамбля не ортогональных сигналов, а таких, которые обладают «хорошими» взаимными корреляционными функциями; при этом критерием качества ВКФ является обеспечение максимальной помехоустойчивости. Исследования, проведенные в /2/, показали, что реальные системы сигналов дают вероятность ошибки большую, чем для случая нормализации взаимных помех. Увеличение вероятности ошибки (или проигрыш в отношении сигнал/помеха) существенно зависит от выбора системы сигналов.
Значения ВКФ Rкр(τр) являются случайной величиной, так как τр - случайный сдвиг во времени. Кроме того, помеховая составляющая (2.15) определяется не только значениями ВКФ, но и уровнями сигналов ![]() , которые также можно считать случайной величиной. Случайность усиливается еще и тем, что число одновременно работающих абонентов тоже является случайным со средним значением, равным
, которые также можно считать случайной величиной. Случайность усиливается еще и тем, что число одновременно работающих абонентов тоже является случайным со средним значением, равным ![]() , а также и тем, что в силу случайности τр копия сигнала может перекрываться с различными сигналами мешающего абонента, которые представляют символы «1» и «0» информации этого абонента. В результате имеют место различные взаимно корреляционные функции /18/:
, а также и тем, что в силу случайности τр копия сигнала может перекрываться с различными сигналами мешающего абонента, которые представляют символы «1» и «0» информации этого абонента. В результате имеют место различные взаимно корреляционные функции /18/:
1. Периодическая ВКФ (ПВКФ).
В мешающем сигнале в течение длительности Т следуют одинаковые символы информации. Например, на рис.2.За р-й абонент в

Рис.2.3. Виды ВКФ
интервале интегрирования длительности Т излучает одинаковые сигналы Sp(t), которые представляют либо символы «1», либо символы «0» информации. Получение этого вида ВКФ эквивалентно перемножению копии сигнала Sk(t) с циклическим сдвигом сигнала Sp(t). Этот самый распространенный вид РКФ будет иметь место при любой модуляции при режиме работы и с активной, и с пассивной паузами.
2. Апериодическая ВКФ (АВКФ).
Сигнал Sp(t) следует один, до и после него сигнал отсутствует. Копия сигнала перемножается с отрезком сигнала Sp(t) (рис.2.3б). Этот вид ВКФ характерен для АМ, когда в течение длительности копии сигнала Т происходит смена символа информации р-го абонента.
3. Смешанно-периодическая ВКФ (СВКФ).
Этот вид ВКФ (рис.2.3в) получается при использовании ортогональной модуляции, когда для передачи символов «1» и «0» используются различные сигналы Sp(t) и Sl(t).
4. Меандро – инвертированная ВКФ (МИВКФ).
Этот вид ВКФ получается при использовании противоположных сигналов, когда «1» передается сигналом Sp(t), а «0» - сигналом – Sp(t) (рис.2.2). Если p=k, получаем меандро – инвертированную КФ (МИКФ). Отличие распределения значений ВКФ от гауссовского увеличивает вероятность ошибки /2/. Для получения минимальной вероятности ошибки при мешающих сигналах одного уровня следует выбирать такую систему сигналов, распределение ВКФ которой мало отличается от гауссовского и характеризуется минимальной дисперсией. При наличии мощных сигналов мешающих абонентов минимальную вероятность ошибки обеспечит та система сигналов, которая характеризуется минимальным значением максимальных выбросов.
2.3. Примеры РТС ПИ с РКФ
РКФ с ШПС нашло применение в целом ряде многоканальных систем. Столь широкий интерес к таким системам объясняется прежде всего применением в них широкополосных сигналов, которые определяют важнейшие положительные качества систем с РКФ.
Основным фактором здесь является эксплуатационная гибкость, которая определяется простотой вхождения в связь без поиска свободного канала (частоты), без сложных операций перехода на другой адрес, без ожидания и очереди. Это объясняется тем, что адресными сигналами являются широкополосные сигналы, обычно передаваемые в общей полосе частот, и переход на другой адрес осуществляется изменением логических связей в генераторе сложного сигнала.
Весьма важным является также еще одно свойство систем с широкополосными сигналами - эластичность при перегрузках. Как указано в §2.1, качество связи в основном определяется числом одновременно работающих абонентов, т.е. числом мешающих сигналов на входе приемника. С изменением числа активных абонентов качество связи изменяется: при малом числе активных абонентов получается очень высокое качество, а при увеличении числа активных абонентов качество связи постепенно ухудшается. Именно эта постепенность изменения качества свези и определяет свойство эластичности.
Кроме того, большинство широкополосных сигналов (с большой базой) обеспечивают малую чувствительность приемника к сосредоточенным по спектру и импульсным помехам, а также к помехам, возникающим из-за многолучевого распространения. К тому же использование ШПС обеспечивает некоторую скрытность передачи.
РКФ с ШПС прежде всего находят применение в низовой радиосвязи, где требуется обеспечить связь между большим количеством абонентов, как правило, подвижных /3, 7/. Это – сельская связь, связь внутри города (на стройках, больших предприятиях, в милиции и т.д.).
Весьма перспективным является использование ШПС в спутниковых системах связи, так как в этих системах определяющим является простота обеспечения МСД к спутниковому ретранслятору /7, 14/. Спутник - ретранслятор виден с большой территории земли, может быть использован большим количеством абонентов (земных станций) для ретрансляции их сигналов на большие расстояния. Поэтому вопросы простоты осуществления МСД являются первостепенными. МСД с ШПС можно осуществлять при минимальной координации между отдельными абонентами или группами абонентов.
Впервые РКФ были применены в низовой военной радиосвязи /3, 16/. В 60-х годах в США были разработаны и испытаны системы RACEP, RADEM, RADA и др. Все эти системы характеризуются свободным доступом абонентов в систему.
Это свойство отмечено первыми двумя буквами в названиях систем: RA – Random Access - случайный доступ. Все эти системы обеспечивают обмен речевой информацией между абонентами. Речевые сигналы преобразуются в цифровую (импульсную) форму с использованием различных видов импульсной модуляции: в системе RACEP используется ФИМ, в системах RADEM и RADA - различные модификация дельта - модуляции. В этих системах используются сигналы с пассивной паузой: «1» информации передаются сигналом S(t), а при «0» информации - излучение сигнала отсутствует. В качестве сигнала используется так называемая адресная группа импульсов, этот сигнал является одновременно адресом, указывающим, кому предназначено сообщение. Адресные группы состоят из последовательности n коротких импульсов (n=3,4). Адресные группы различных абонентов различаются
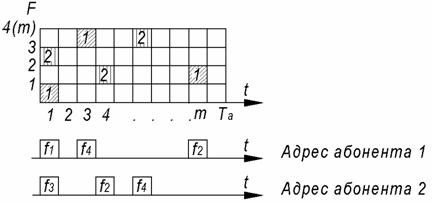
Рис.2.4. Процесс формирования адресных групп импульсов с помощью ЧВМ
временными интервалами между импульсами, каждый импульс передается на своей частоте (всего частот m, m>n). Принцип формировании адресных групп поясняется на рис.2.4. Время Та, отведенное для передачи адресной группы, разделяется на S позиций, а полоса частот f на m частотных каналов. Пространство время – частота, отведенное для формирования адресного сигнала, называется частотно – временной матрицей (ЧВМ). Адреса абонентов располагаются по различным ячейкам ЧВМ. На рисунке представлены два различных адреса, которые отличаются друг от друга время - частотными интервалами. На рис.2.5 поясняется принцип формирования сигнала одного абонента, при этом используется адресная группа того абонента, кому предназначено сообщение.
Сигналы ЧВМ являются частным случаем широкополосных сигналов: это АМ-ДЧ-сигналы. База этих сигналов невелика, она определяется произведением длительности Та на ширину спектра F и по величина равна размеру матрицы ![]() .
.
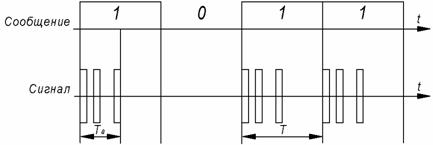
Рис.2.5. Сообщение и сигнал в системе с ЧВМ (импульсы в группе передаются на различных частотах)
Схема формирования сигнала в передатчике представлена на рис.2.6. Обычно используется дискретная линия задержки. Габариты
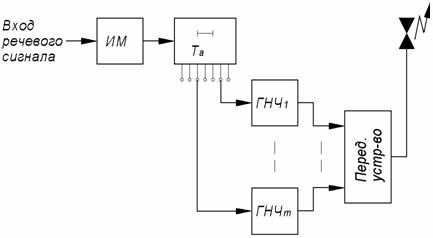
Рис.2.6. Передающее устройство ААСС с ЧВМ (ИМ - импульсный модулятор, ГНЧ - генератор несущей частоты)
передатчика определяются, в основном, выходными каскадами т.е. мощностью, которую надо излучить, чтобы обеспечить связь на заданное максимальное расстояние. Обработка сигналов в приемнике проводится с помощью квазиоптимального метода, который иногда называют, нелинейной согласованной фильтрацией /7/. Структурная схема приемника представлена на рис.2.7.
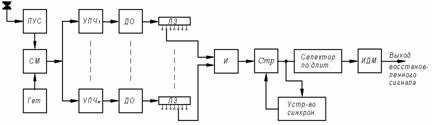
Рис.2.7. Структурная схема приемного устройства ААСС с ЧВМ
Приемник содержит m трактов УПЧ, в которых проводится разделение импульсов адресной группы в соответствии с их частотами. В каждом тракте стоит детектор огибающей (ДО), после которого сигнал подается на линию задержки с отводами. Линия задержки предназначена для выравнивания по задержке импульсов адресной группы из различных частотных трактов. Отводы линии задержки устанавливаются так, чтобы импульсы определенной адресной группы совместились во времени на входе последующей схемы совпадения (И). Именно переключением отводов линии задержки осуществляется переход приемника на другой адрес. Схема И фиксирует наличие определенной адресной группы на входе приемника, т.е. фактически наличие «1» в принимаемом сообщении.
На входе приемника кроме полезного сигнала действуют мешающие сигналы всех работающих в данный момент абонентов системы. Поток мешающих импульсов несколько разрежается в частотных трактах. Но ложные срабатывания схемы И за счет мешающих сигналов все же будут происходить и на выходе эти ложные срабатывания будут проявляться в виде помехи (внутрисистемная помеха). Первые разработки и испытание этих систем показали, что внутрисистемные помехи имеют довольно большой уровень, который прежде всего зависят от числа «1» в сообщении, т.е. от плотности потока адресных групп в сигнале каждого абонента. Дня уменьшения этой плотности используются различные модификации дельта - модуляции речевых сообщений с пониженным числом «1» на выходе модулятора /3/.
Уменьшение внутрисистемных помех можно также получить, если учитывать статистические свойства потоков полезных и мешающих импульсов: полезные импульсы на выходе схемы И обычно имеют приблизительно одинаковую длительность и следуют с интервалами lT , l - целое число, а мешающие импульсы следуют со случайными интервалами и имеют случайную длительность, при этом коротких импульсов будет больше. На этом отличии мешающего и полезного потоков импульсов и основана селекция мешающих импульсов, которая реализуется в виде стробирования (Стр) и селекции по длительности (рис.2.7). Для работы первого блока требуются стробирующие импульсы, которые вырабатываются устройством синхронизации. Выделение сигнала синхронизации осуществляется, как правило, по полезному потоку импульсов: здесь учитывается его квазипериодичность, и полезный сигнал выделяется с помощью накопления.
Добавление блоков синхронизация, стробирования и селекции по длительности усложняет приемное устройство, но это в большинстве случаев необходимо, так как в противном случае получаем очень низкое качество связи.
Все эти системы работают по принципу радиотелефона. Абоненты вступают в связь по мере надобности. Адреса устанавливаются с помощью обычного номеронабирателя. Адресная группа является одновременно и вызывным сигналом. Приемники всех абонентов обычно находятся в режиме дежурного приема на своем адресе. При фиксации наличия нескольких следующих подряд адресных групп приемник формирует световой или звуковой вызывной сигнал. Между абонентами устанавливается дуплексная связь.
Такой принцип позволяет организовать связь в системе с любым числом абонентов: число абонентов будет, прежде всего, определять размер матрицы Sּm. Эти системы использовались для связи в воинских подразделениях от батальона (связь между солдатами и командиром) до дивизии (связь между штабами). Исполнение станций было различным: от карманного варианта (приемопередатчик размещался в каске солдата) до мобильного. Различались эти станции в основном мощностью передатчика, т.е. радиусом действия. Принцип же работы их в различных вариантах был одинаковым.
Приведем основные технические характеристики этих систем /3/:
число абонентов в системе - 700,
среднее число активных абонентов - 35,
число импульсов в адресе - 3,
число временных позиций ЧВМ - 16,
число частотных позиций - 3,
диапазон частот - УКВ,
радиус действия - 3![]() 15 км.
15 км.
Испытания систем типа RADA показали, что подобный принцип организации связи является очень перспективным. Однако используемые сигналы и принципы их формирования и обработки не обеспечивают надежную связь при сосредоточенных по спектру и импульсных помехах. В настоящее время сигналы ЧВМ имеют очень ограниченное применение. Но положительные свойства принципа организации связи, основанного на использовании адресных сигналов в общей полосе частот, были подтверждены и определили более широкое использование этого принципа в будущих разработках, но уже с другими сигналами, в частности, с ФМ сложными сигналами.
Принципы построения спутниковых систем связи определяют их отличительные особенности, важнейшими из которых являются:
1. Ретрансляция большого количества сигналов земных станций, расположенных на больших расстояниях друг от друга.
2. Нелинейная характеристика усилителя ретранслятора.
3. Доступность ретранслятора помехам.
Стремление упростить бортовую аппаратуру привело к применению пассивных ретрансляторов. На рис.2.8 представлена структурная схема одноствольного ретранслятора /14/.
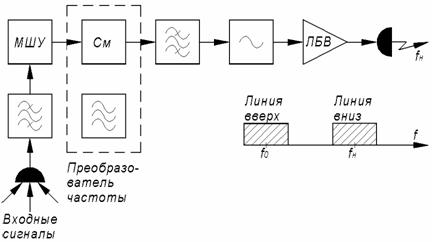
Рис.2.8. Упрощенная структурная схема одноствольного ретранслятора (МШУ - малошумящий усилитель)
Множество сигналов, поступающих на ретранслятор в полосе частот с центральной частотой fв, появляются на выходе ретранслятора в полосе частот с центральной частотой fн. Входная и выходная полоса частот ретранслятора разносятся достаточно далеко друг от друга, чтобы предотвратить возможность самовозбуждения ретранслятора. На рис.2.8 показано только одно преобразование частоты. На практике используется предварительное преобразование в сигналы промежуточной частоты, а затем производится повышающее преобразование в сигналы частоты передачи.
Большинство спутников связи содержит несколько (четыре и более) параллельных ретрансляторов с несколькими узконаправленными антеннами, чтобы облегчить проблему многостанционного доступа, особенно при сильном различии уровней принимаемых сигналов для различных классов потребителей.
Выходной усилитель мощности обычно реализуется на ЛБВ которая имеет нелинейную амплитудную характеристику. Это необходимо учитывать при ретрансляции сигналов многих земных станций. Если входные сигналы земных станций не будут выходить за пределы линейного участка характеристики выходного усилителя, то мощность ретранслятора будет использоваться не полностью и уровень средней мощности, приходящийся на каждый сигнал при ретрансляции, будет пропорционален уровню соответствующего сигнала на входе, т.е. слабые сигналы будут иметь и малую мощность. Это не всегда желательно при обеспечении МСД.
Если сигналы земных станций выводят ЛБВ на нелинейный участок характеристики, то возникают большие перекрестные помехи, на излучение которых тратится мощность передатчика ретранслятора. Кроме того, в ЛБВ происходит перераспределение мощностей сигналов земных станций в пользу мощных сигналов. Все это определяет также неэффективное использование мощности ретранслятора. К тому же следует учесть, что мощность ретранслятора тратится также на излучение помех, которые действуют на трассе земля-спутник.
Использование традиционных методов объединения сигналов земных станций на основе ВРК и ЧРК усложняет систему в целом. Так, при ВРК необходима общесистемная синхронизация, а при ЧРК требуется выравнивание мощностей земных станций, поступающих на вход ретранслятора. Все это реализуется довольно сложно при негеостационарной орбите.
В процессе исследования возможности МСД к спутниковому ретранслятору в США были разработаны и испытаны несколько систем с РКФ /7/.
Первой такой системой была экспериментальная спутниковая система связи с многопозиционным доступом до 40 земных станций через ретранслятор LES-2 (Lincoln Еxperimental Satellite), созданный в Линкольновской лаборатории Массачусетского Технологического института. В качестве сообщений земных станций использовались сигналы вокодера (4,8 кбит/с) и телетайпа (0,2 кбит/с). Двоичные символы сообщения длительностью 200 мкс кодируются в сверточном кодере. Передача информации осуществляется с использованием многопозиционного сигнала. Напомним, что многопозиционные сигналы требуют меньших затрат по сравнению с двоичными. Многопозиционные сигналы представляют собой отрезки гармонических колебаний с различными частотами: для передачи комбинаций из четырех информационных символов используется группа из 16 частот. Положение группы из 16 частот меняется по определенной программе для каждой четверки информационных символов. Частотный синтезатор земных станций вырабатывает 4096 частот с интервалом между ними 5 кГц. Программа перестройки группы из 16 частот по этим частотам и является адресом сообщения. Такое изменение несущей частоты от сигнала к сигналу называется принципом «прыгающей частоты». Спутник на геостационарной орбите работал в режиме переизлучения сигнала. Предполагалось, что случайное расположение 16 частот по 4096 возможным частотам уменьшает в среднем перекрестные помехи, которые возникают при усилении многочастотного сигнала нелинейным усилителем.
Развитие этого метода асинхронной связи привело к созданию аппаратуры TATS (Tactical Satellite Communication - тактическая система связи), которая испытывалась с более совершенными спутниками серии LES.
В этой системе адресом является также закон изменения несущей частоты. Также используются многопозиционные сигналы, но сами сигналы формируются несколько иначе. Каждый сигнал, представляющий 6 бит информации, передается последовательностью из 8 символов. Первый символ является синхронизирующим, он излучаемся для данной земной станции на частоте, относительно которой смещаются частоты остальных символов. Они передаются на различных частотах (всего 8 поднесущих частот), отличающихся друг от друга на 2Δf. Всего используется 64 кодовых слова, отличающихся друг от друга смещениями частот между символами. Любые два кодовых слова имеют не более чем один одинаковый элемент, не считая синхроимпульса.
Прием такого сигнала осуществляется по параллельным каналам с согласованной фильтрацией на промежуточной частоте. Для каждого элементарного импульса проводится измерение и квантование значения огибающей. Далее декодирующее устройство выносит решение, какое из 64 кодовых слов было передано.
Для адресации передаваемого сообщения, а также для распределения энергии сигнала равномерно по полосе частот общего тракта передачи за каждым абонентом (земной станцией) закреплен определенный закон изменения «прыгающей частоты». Несущая частота радиоимпульсов получается в результате сложения «прыгающей частоты» с частотным сдвигом элементарного импульса относительно частоты синхронизирующего импульса кодового слова. Цикл изменения «прыгающей частоты» равен 7 элементарным импульсам, поэтому радиоимпульсы кодового слова будут передаваться на разных частотах в пределах полосы частот системы.
В режиме дежурного приема аппаратура данной станции осуществляет непрерывный поиск по частоте и во времени частотно-временной комбинации, закрепленной за данной станцией, Для обнаружения и вхождения в синхронизм начальная часть передаваемого сообщения содержит около 500 элементарных импульсов с соответствующим изменением несущей частоты. Интервал поиска во времени равен 7 элементарным импульсам, а по частоте - ![]() 400 Гц. Время вхождения в связь при малой скорости передачи (75 бит/с) равно 5 с, а при большой (2400 бит/с) - 0,16 с.
400 Гц. Время вхождения в связь при малой скорости передачи (75 бит/с) равно 5 с, а при большой (2400 бит/с) - 0,16 с.
В литературе сообщалось о надежной дуплексной связи самолет - спутник LES-6 - земля при скорости 2400 бит/с при одновременной передаче по тому же тракту связи с полосой 500 кГц 12 имитируемых сигналов с той же скоростью.
Современное состояние техники и надежда на будущий прогресс позволяют сделать предположение о возможности использование более сложного ретранслятора с обработкой сигналов на борту. Это позволит повысить эффективность использования полосы частот и мощности спутника/7/. Обработка сигналов на борту целесообразна, когда на линии земля-спутник присутствуют помехи и в других случаях. Структурная схема ретранслятора с обработкой на борту представлена на рис.2.9. На борту проводится демодуляция сигналов, изменение структуры сигналов, формирование нового группового сигнала и его усиление
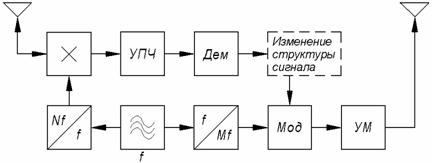
Рис.2.9. Упрощенная структурная схема ретранслятора с обработкой сигналов на борту
Широкое применение в настоящее время в низовой мобильной радиосвязи получила сотовая связь. В рамках данного учебного пособия не представляется возможным дать подробное описание принципа построения сотовых систем связи и полного алгоритма функционирования систем, использующих кодовое разделение каналов, которые приведены в многочисленной литературе (см., например /6/).
Ниже приводятся сведения, касающиеся преимуществ кодового разделения каналов по сравнению с другими методами, и дано краткое описание прямого канала системы cdmaOne.
Системы сотовой связи – это системы с множественным доступом (многоканальные). Их основные параметры зависят от технологии распределения имеющегося частотно – временного ресурса между отдельными каналами.
На сегодняшний день системы FDMA и TDMA (соответственно с частотным и временным разделением каналов) практически исчерпали свои возможности и не могут обеспечивать высокую пропускную способность.
Радикальным решением эволюции сотовых систем связи благодаря высокой спектральной эффективности является технология кодового разделения каналов CDMA.
Как уже было отмечено выше, при кодовом разделении каждый из каналов системы полностью использует весь выделенный частотно – временной ресурс; радиоканалы перекрываются как по времени, так и по частоте. Разделение каналов осуществляется за счет того, что каждый канал имеет свою «поднесущую» - адресную кодовую последовательность. В результате этого взаимные помехи определяются не частотной и временным положением сигналов, а корреляционными свойствами адресных последовательностей.
Снижение уровня взаимных помех и увеличение пропускной способности достигается также автоматическими регулировками мощности (АРМ) передатчиков мобильной станции (МС) и базовой станции (БС). Так как радиоканалы перекрываются по времени и частоте, то при существенном различии сигналов в точке приема более сильные сигналы одних абонентов будут маскировать более слабые сигналы других, что приведет к потере связи и, как следствие, к резкому снижению пропускной способности сети. АРМ позволяет существенно нивелировать этот эффект.
В целях максимального эффективного использования ресурса системы в сетях применяют динамическое распределение каналов, при котором рабочие каналы закрепляют не за абонентами, а за вызовами.
При технологии CDMA выполняется ряд условий: расширение базы посредством кода, кодовая синхронизация, применение оптимальных кодовых последовательностей, уровень помех в системе не выше порогового.
Для расширения базы исходный узкополосный сигнал умножают на псевдослучайную знакопеременную последовательность (ПСП), состоящую из N элементов (чипов) длительностью τ каждый и имеющую период повторения T=N·τ (в этом случае база сигнала B=N). Свойства некоторых часто используемых на практике ПСП, рассмотрены ниже в главе 3.
Выбор кодовых последовательностей для систем CDMA зависит от типа канала: прямой (от БС к МС) или обратный (от МС к БС). В прямом канале связи поддерживают тактовую и кадровую синхронизацию адресных последовательностей рабочих каналов одной МС. Синхронизацию обеспечивают при формировании группового сигнала в передающем тракте БС. Сигналы от БС поступают на вход приемника МС без взаимных временных сдвигов, поскольку в пределах одного луча все они проходят одинаковое расстояние. В результате этого на входе приемника МС сохраняется режим тактовой и кадровой синхронизации адресных последовательностей рабочих каналов, а значит можно использовать синхронную обработку группового сигнала. Поэтому для минимизации межканальных помех возможно применение ансамблей ортогональных сигналов (например, ансамбль функций Уолша).
В обратном канале ситуация иная: у адресных последовательностей рабочих каналов МС временные сдвиги произвольные, т.е. имеет место асинхронный режим работы МС. Поэтому в нем нужен ансамбль сигналов с хорошими корреляционными свойствами: максимальный уровень выбросов ВКФ и боковых лепестков АКФ должен быть как можно меньше.
В наибольшей степени этим требованиям удовлетворяет бинарные коды на основе М-последовательностей (см. главу 3). В основном их применение обусловлено хорошими свойствами периодических автокорреляционных функций (ПАКФ). Уровень боковых лепестков ПАКФ таких кодов постоянен и равен по модулю 1/N. Очевидно, что при достаточно больших длинах таких ПСП можно добиться сколь угодно малой величины бокового лепестка. Это свойство ПАКФ позволяет выделять отдельные лучи из общей интерференционной картины при многолучевом распространении радиоволн, а также с высокой точностью поддерживать кодовую синхронизацию в системе связи.
Правильный выбор ПСП наделяет систему CDMA рядом уникальных свойств.
Каждый рабочий канал имеет свои адресные последовательности, причем сигналы соседних каналов воспринимаются при приеме как белый шум, уровень которого можно снижать, увеличивая базу сигналов. Они обладают эластичностью, могут работать в одном диапазоне с другими радиотехническими средствами. При этом возможно соблюдение требований полной электромагнитной совместимости за счет малой спектральной плотности энергии широкополосных сигналов.
В системах CDMA практически исключается несанкционированный доступ в сеть.
Системы CDMA позволяют существенно увеличить пропускную способность за счет фактора речевой активности абонентов. В зависимости от параметров речи абонента при кодировании из речевого сигнала удаляют избыточность и кодированную информацию передают с различной скоростью, поддерживая энергию посылки одного символа неизменной. В целом эти меры дают возможность увеличить пропускную способность системы примерно в два раза.
Разработчиком первого в мире действующего стандарта мобильной сотовой связи на основе CDMA является фирма QUALCOMM (коммерческое название cdmaOne). Система cdmaOne рассчитана на работу в диапазоне 800 МГц; общая полоса частот канала связи составляет 1,25 МГц.
Прямой канал системы cdmaOne состоит из одного пилотного канала, одного канала синхронизации и 62 других каналов. Эти 62 канала могут быть полностью использованы для передачи прямого трафика, однако до семи из них можно использовать и в качестве каналов персонального вызова.
Для разделения каналов служат кодовые ФМ – последовательности, сформированные на базе ортогональных функций Уолша. Адресная последовательность W0 (константа) предназначена для организации пилотного канала, а адресная последовательность W32 (меандр) – для организации канала синхронизации. Каналы персонального вызова и прямого трафика используют другие 62 адресные последовательности. Еще раз надо обратить внимание на то, что в прямом канале связи функции Уолша используются для кодового разделения рабочих каналов (в обратном канале связи их функциональное назначение будет принципиально другим).
Как видно из рис.3.10, в предающем тракте БС перенесение сигналов в каналах на адресные поднесущие производят в 2 этапа. На первом этапе последовательность информационных символов модулирует (операция «сумма по модулю 2») адресную ФМ - последовательность на основе функций Уолша (Wi) с тактовой частотой 1,288 Мчип/с. На втором этапе полученный поток скремблирует («сумма по модулю 2») псевдослучайные ФМ – последовательности PN1 и PNQ в синфазном (I) квадратурном (Q) каналах. Эти псевдослучайные последовательности не совпадают между собой и являются известными М-последовательностями. Они одинаковы для всех 64 каналов и имеют тактовую частоту 1,2288 Мчип/с.
Рис.3.10. Структурная схема передающего тракта БС.
Поскольку в пилотном канале используют функцию Уолша W0 (константу), то адресную последовательность в нем фактически определяют квадратурные ПСП PN1 и PNQ.
В канал синхронизации данные поступают со скоростью 1200 бит/с. После сверточного кодирования (9, 1/2) их скорость возрастает до 2400 символов/с. Затем информация поступает на устройство повторения, и на его выходе поток имеет скорость 4800 символов/с.
Далее следует процедура блокового перемежения, в ходе которой информацию перемежают в пределах кадров 20 мс. Перемежение применяют для преобразования пакетов ошибок, возникающих при передаче в канал связи, в одиночные ошибки. Это позволяет уменьшить вероятность ошибки при декодировании информации.
На выходе перемежителя скорость потока по-прежнему составляет 4800 символов/с. После проведения «подготовительных» операций информация поступает на модулятор последовательностей Уолша. Каждый символ на входе модулятора имеет длительность, равную четырем периодам последовательности Уолша: ![]() (64 - количество чипов на периоде функции Уолша, или длина кода). Очевидно, что на выходе модулятора тактовая частота потока также будет 1.2288 Мчип/с.
(64 - количество чипов на периоде функции Уолша, или длина кода). Очевидно, что на выходе модулятора тактовая частота потока также будет 1.2288 Мчип/с.
Для передачи речи по каналам прямого трафика стандартом предусмотрено использование вокодера CELP с переменной скоростью преобразования 8550, 4000, 2000 или 800 бит/с в зависимости от параметров речи абонента. Информацию в каналах трафика передают кадрами по 20 мс. При этом скорость передачи кодированной речевой информации, поступающей в канал, постоянна в течение кадра и составляет 9600, 4800 2400 или 1200 бит/с. Сверточныи кодер с длиной кодового ограничения 9 и скоростью 1/2 удваивает скорость потока: 19200, 9600, 4800 или 2400 символов/с на выходе, соответственно. Для выравнивания скорости потоков кодированной речевой информации применяют устройство повторения; данные на его выходе всегда следуют со скоростью 19200 символов/с. Чем больше кратность повторения символов, тем меньшую мощность используют для их передачи по каналу связи при фиксированной суммарной энергии посылки исходного символа. Это позволяет уменьшить уровень взаимных помех в системе и увеличить пропускную способность сети.
При приеме МС заранее неизвестны скорость передачи информации и кратность повторения символов в текущем кадре. Поэтому декодер МС предпринимает 4 попытки декодирования принятой посылки с четырьмя возможными скоростями передачи и кратностями повторения. Истинную скорость передачи определяют по минимуму обнаруженных декодером ошибок.
Длинный код (на основе М-последовательности длиной 242-1 (![]() 4,4·1012)) несет информацию об индивидуальном номере абонента в сети. Маска, необходимая для генерирования длинного кода, записана в ПЗУ МС. Тактовая частота при генерировании длинного кода – 1,2288 Мчип/с, но устройство децимации (на pис.3.10 не показано) понижает тактовую частоту до 19200 бит/с, оставляя лишь каждый шестьдесят четвертый символ в последовательности. Модифицированный длинный код с выхода дециматора поступает на один вход скремблера; на другой вход со скоростью 19200 символов/с поступает информация с выхода блокового перемежителя. Скремблер производит операцию «сумма по модулю 2» над входными потоками информации. Следует отметить, что скремблирование информации длинным кодом является еще и мощным криптографическим средством, обеспечивающим высокую степень конфиденциальности передаваемых сообщений.
4,4·1012)) несет информацию об индивидуальном номере абонента в сети. Маска, необходимая для генерирования длинного кода, записана в ПЗУ МС. Тактовая частота при генерировании длинного кода – 1,2288 Мчип/с, но устройство децимации (на pис.3.10 не показано) понижает тактовую частоту до 19200 бит/с, оставляя лишь каждый шестьдесят четвертый символ в последовательности. Модифицированный длинный код с выхода дециматора поступает на один вход скремблера; на другой вход со скоростью 19200 символов/с поступает информация с выхода блокового перемежителя. Скремблер производит операцию «сумма по модулю 2» над входными потоками информации. Следует отметить, что скремблирование информации длинным кодом является еще и мощным криптографическим средством, обеспечивающим высокую степень конфиденциальности передаваемых сообщений.
Скремблированные данные мультиплексируют с информацией о регулировании мощности передатчиков МС: определенные символы потока данных на входе мультиплексора заменяют битами команд регулировки мощности.
После мультиплексирования информация со скоростью 19200 символов/с поступает на кодовый модулятор. Номер функции Уолша, применяемой в адресной последовательности, однозначно определяет номер канала трафика данной БС. С выхода модулятора сложный сигнал с тактовой частотой 1,2288 Мчип/с направляют в квадратурные каналы (I и Q), где он скремблирует ПСП, применяемые во всех 64 каналах.
Последняя группа каналов - каналы персонального вызова. Они служат для передачи МС системной информации и команд управления. При вызове, исходящем от МС, когда она производит запрос по каналу доступа о предоставлении ей канала трафика, БС подтверждает запрос и передает команду настроиться на выделенный канал прямого трафика. Для этого также используют каналы персонального вызова. За несколькими исключениями структура канала персонального вызова повторяет структуру 'канала прямого трафика. Различия состоят в том, что данные в каналы вызова поступают со скоростью 9600, 4800 или 2400 бит/с, информацию в них не мультиплексируют с командами регулировки мощности и, наконец, используют другую маску длинного кода.
Сформированные в прямом канале связи квадратурные составляющие сигналов во всех 64 CDMA-каналах затем объединяют и суммируют с весами в режиме линейного сложения. Синфазную и квадратурную компоненты получившегося группового сигнала фильтруют в основной полосе частот и подают на схему 4-позиционной фазовой манипуляции ФМ-4, где видеосигнал переносят на промежуточную частоту.
Манипулированный групповой сигнал на промежуточной частоте затем переносят с промежуточной частоты на несущую, подают на линейный усилитель мощности, и через полосовой фильтр направляют к передающей антенне БС.
Пилотный сигнал, непрерывно излучаемый БС, выполняет несколько функций. Уровень мощности сигнала, излучаемого в пилотном канале, постоянен и на 4...6 дБ выше, чем в каналах трафика. MС - использует пилотный сигнал для захвата несущей частоты, после чего отслеживает его с точностью до фазы и выделяет опорное колебание, необходимое для когерентной обработки сигналов данной БС при приеме. Измеряя мощность пилотных сигналов БС, МС может использовать полученные данные при эстафетной передаче, а также при регулировании мощности передатчика.
Адресная последовательность пилотного канала (короткий код) представляет собой ПСП PN1 и PNQ, каждая из которых является М-последовательностью с длиной 215 (32768) и периодом повторения
 .
.
Все БС в системе используют один короткий код, но с разными циклическими сдвигами. По циклическому сдвигу короткого кода можно выделять и различать сигналы, излучаемые БС в разных сотах и секторах. Циклические сдвиги имеют равномерный шаг 26 (64) чипа. Таким образом, возможны 29-1=511 различных циклических сдвигов короткого кода относительно положения с условно нулевым сдвигом. Это означает, что даже в районах с микросотовой структурой есть твердая гарантия того, что сигналы разных БС можно различить при приеме. Если сеть содержит более 511 БС, то легко добиться того, чтобы БС с одинаковыми циклическими сдвигами короткого кода не были одновременно в зоне радиовидимости одной МС.
Для обеспечения точности циклических сдвигов стандарт cdmaOne использует концепцию синхронизированных БС. Единое время в системе и высокую стабильность тактовых частот поддерживают с помощью спутниковой системы радионавигации GPS.
RAKE-приемник МС имеет в своем составе 3 параллельных канала корреляционной обработки сигналов и 1 дополнительный, сканирующий канал. После захвата несущей частоты МС обрабатывает посылки в пилотном канале БС, выделяя из принимаемого многолучевого сигнала наиболее мощные компоненты. На этом этапе, этапе поиска сигналов БС, МС использует вспомогательный сканирующий канал. Последующая обработка сигналов трех выбранных лучей в ветвях корреляционного приемника позволяет МС отслеживать данные сигналы в присутствии аддитивных и мультипликативных помех и оценивать с заданной точностью их амплитуды, фазы и временные задержки.
Применение пилотного сигнала и трехканального RAKE-приемника делает возможным когерентный прием сигналов БС с трехкратным временным разнесением и последующим когерентным объединением ветвей. Все это обеспечивает существенный энергетический выигрыш при приеме и, как следствие, высокую помехоустойчивость системы.
Чем больше мощность пилотного сигнала, тем выше качество приема в прямом канале связи. Однако введение большого запаса по мощности в пилотном канале неэкономно расходует частотно-временной ресурс системы и снижает ее пропускную способность.
Измеряя временные задержки сигналов выделенных лучей, МС подстраивает в корреляторах циклические сдвиги опорных ПСП и синхронизируется с БС по короткому коду. После этого МС начинает сканировать канал синхронизации, использующий тот же короткий код, с тем же циклическим сдвигом, что и пилотный канал.
Каналы синхронизации всех БС используют одну функцию Уолша W32 и служат для синхронизации МС с сетью. Скорость передачи данных по каналу синхронизации составляет 1200 бит/с, а длина кадра равна периоду повторения короткого кода (26,66 мс). Поскольку канал синхронизации жестко связан по тактовой частоте и по сдвигу циклического кода с пилотным каналом, МС получает доступ к синхроинформации той БС, на пилотный канал которой она настроилась.
Сообщение канала синхронизации содержит: данные о точном времени в системе; циклический сдвиг короткого кода данной БС; информацию идентификации БС и МС; мощность сигнала в пилотном канале; параметры длинного кода; скорость передачи данных в канале персонального вызова.
Принимая сообщение канала синхронизации, МС получает необходимую информацию для начальной синхронизации с сетью.
По завершении процедур начальной синхронизации МС настраивается на канал персонального вызова. Тем самым она получает доступ к системной информации и может принимать команды управления. Если команды управления с БС не поступают, МС переходит в режим ожидания, продолжая прослушивать канал персонального вызова и поддерживая готовность к установлению соединения.
Скорость передачи информации в канале персонального вызова составляет 9600, 4800 или 2400 бит/с. Маска длинного кода зависит от номера канала вызова и циклического сдвига ПСП в пилотном канале.
МС настраивается на канал персонального вызова, либо перебирая имеющиеся каналы (до семи каналов в полосе 1,25 МГц), либо по команде с БС.
Сообщения в каналах персонального вызова могут быть четырех типов:
заголовок; пейджинг; ордер; назначение каналов.
Система сотовой связи cdmaOne адаптивна. Ее конфигурацию можно выбрать, исходя из конкретных условий развертывания сети. Тип конфигурации передают с помощью четырех сообщений заголовка: параметров системы; параметров доступа; граничного списка; списка каналов CDMA.
Параметры системы несут информацию о конфигурации канала персонального вызова, параметрах регистрации, вспомогательных параметрах при поиске пилотного сигнала и т. д.
Параметры доступа содержат сведения о конфигурации канала доступа MС и некоторые параметры управления.
Граничный список содержит данные, позволяющие ускорить процесс эстафетной передачи - например, циклический сдвиг короткого кода в пилотном канале и другие характеристики БС соседних сот.
Список каналов CDMA позволяет МС узнать расположение тех полос (с шириной 1,25 МГц) частотного плана, в которых размещены каналы персонального вызова.
Пейджинг содержит сообщения (страницы), адресованные одной или нескольким МС. Эти сообщения обычно передают те БС, которые находятся в зоне поиска МС при входящем вызове в сеть. При скорости передачи 9600 бит/с один канал персонального вызова может обеспечить передачу около 180 страниц в течение одной секунды. Соответственно 7 каналов могут передавать около 1260 страниц в секунду.
Ордер охватывает широкий класс сообщений управления конкретными МС. Их используют для подтверждения регистрации МС, для блокировки МС в состоянии сбоя и т. д.
Сообщения о назначении каналов позволяют указать MС выделенный канал трафика, назначить ей другой канал персонального вызова, или передать команду о переключении МС в аналоговую систему сотовом связи.
Информацию в канале персонального вызова можно передавать как в бычном режиме, так и в режиме временного разделения (TDM), когда сообщения, адресованные той или иной МС передают в заранее известных временных интервалах - слотах. Период повторения слотов, предназначенных для одной МС, может находиться в пределах 2...128 с. Положение выделенного ей слота МС узнает при регистрации на БС. Работа в TDM-формате позволяет МС сканировать только нужные слоты, отключаясь в перерывах между ними. Более того, структура сообщений в канале персонального вызова такова, что в большинстве случаев МС достаточно сканировать не весь слот, а лишь его часть. Принятые меры обеспечивают существенную экономию источника питания, когда MС находится в состоянии ожидания.
Каналы прямого трафика служат для передачи сообщений трафика (речь и данные абонентов) и служебной информации (сигнализация) с БС на МС.
Кодированная речевая информация поступает в каналы трафика кадрами по 20 мс. Скорость передачи в зависимости от параметров речи абонента составляет 9600, 4800, 2400 или 1200 бит/с и постоянна в течение кадра. В паузах речи скорость информационного потока автоматически понижают до минимального значения. Передача трафика с адаптивной скоростью минимизирует уровень внутрисистемных помех и повышает пропускную способность сети.
По выделении МС канала трафика сигнализация проходит непосредственно через него. Служебная информация, передаваемая по каналу прямого трафика, может быть четырех типов: сообщения управления вызовом, сообщения управления эстафетной передачей, команды регулирования мощности, информация обеспечения безопасности связи и аутентификации абонентов.
Стандартом предусмотрены 2 возможных режима сигнализации. При первом режиме служебные сообщения передают со скоростью 9600 бит/с так, что кадры системной информации замещают кадры трафика. Второй режим обеспечивает передачу трафика и сигнализацию в одном кадре: преобразование речи в вокодере при этом осуществляют не быстрее, чем 4000 бит/с (4800 бит/с в канале), а оставшийся ресурс используют для сигнализации. Результирующий кадр, таким образом, состоит из двух частей - трафика и служебной информации, а скорость передачи в нем составляет 9600 6ит/с.
2.4. Основная информация
1. Асинхронные адресные системы связи (ААСС) характеризуются наличием внутрисистемная помех, которые обусловлены одновременной работой большого числа абонентов. При одинаковой мощности сигналов на входе приемника взаимные помехи имеют характер гауссовского шума, и помехоустойчивость можно определять по известным формулам. В этих системах должны использоваться широкополосные сигналы (с большой базой), при этом база сигналов приблизительно в ![]() раз должна превышать число активных абонентов, где
раз должна превышать число активных абонентов, где ![]() - отношение энергии сигнала к спектральной плотности шума, обусловленного внутрисистемными помехами, - характеризует качество связи.
- отношение энергии сигнала к спектральной плотности шума, обусловленного внутрисистемными помехами, - характеризует качество связи.
2. Важнейшими характеристиками сигналов, используемых в ААСС, являются их корреляционные функции. Применительно к ААСС следует учитывать корреляционные функции различных видов: периодические, апериодические, меандроинвертируемые, смешанно-периодические и др. Однако отклик приемника на сигналы является случайной функцией их корреляционных функций прежде всего за счет случайности времени задержки сигналов и их уровней, а также вследствие случайности следования символов информации, т.е. сигналов, их представлявших.
3. ААСС характеризуется простотой и оперативностью установления связи, эластичностью и живучестью. Они находят широкое применение в низовой радиосвязи, а также в спутниковых и сотовых системах связи.
2.5. Вопросы для самопроверки и самостоятельной работы
1. Чем можно объяснить, что с увеличением базы сигналов качество связи в ААСС повышается?
2. Можно ли утверждать, что работа в ААСС проводится «под шумом»?
3. Когда может наблюдаться распределение взаимных помех на входе приемника, отличное от гауссовского? При каких применениях и условиях работы это возможно?
4. Несколько вопросов относительно сосредоточенных по спектру помех:
а) как практически можно реализовать, известное теоретическое положение, что широкополосные системы могут работать в условиях мощных сосредоточенных по спектру помех?
б) какие методы борьбы с сосредоточенными по спектру помехами можно предложить?
в) каковы принципы технической реализации этих методов?
г) будет ли меняться уровень сигнала на выходе приемника при использовании устройств защиты от сосредоточенных пo спектру помех?
д) при каких условиях эти устройства применять целесообразно?
е) как изменится сосредоточенная по спектру помеха после обработки ее в корреляторе? в согласованном фильтре?
5. При каких практических ситуациях целесообразно использовать ААСС?
2.6. Задачи
2.1. В ААСС потребовалось увеличить в 2 раза число активных абонентов. Какие меры можно предпринять для сохранения качества связи?
2.2. Определить максимальное число активных абонентов при различных сигналах, если допустимая вероятность ошибки 10-3.
2.3.Оценить минимальную базу сигналов, обеспечивающую вероятность ошибки 10-4 при числе активных абонентов, равном 100.
2.4. Вероятность ошибки 10-3 обеспечивается при базе сигналов В=1000 и числе активных абонентов ка=50, Определить соотношения между внутренними шумами приемника и внутрисистемными помехами.
2.5. В ААСС число активных абонентов ка= 80, база сигналов В=1000, качество связи характеризуется вероятностью ошибок 10-3. Определить, к чему приведет увеличение внутренних шумов в два раза. Как надо изменить параметры системы, если требуется сохранить качество связи?
2.6. Поясните принцип образования периодической корреляционной функции. Вычислите ПКФ для последовательности: 111-11-1-1.
2.7. Вычислить периодическую взаимно корреляционную функцию двух последовательностей: 111-11-1-1 и 111-1-11-1. Сравнить ПВКФ с корреляционной функцией, полученной в предыдущей задаче.
2.8. Поясните принцип образования апериодической корреляционной функции. Вычислить: а) апериодическую автокорреляционную функцию последовательности 111-11-1-1. Сравнить с периодической корреляционной функцией; б) апериодическую ВКФ последовательностей: 111-11-1-1 и 111-1-11-1. Сравнить с корреляционной функцией.
2.9. Пояснить принцип формирования меандроинвертированной КФ. Вычислить меандроинвертированную КФ последовательности III-II-I-I»
2.10. Вычислить меандроинвертированную корреляционную функцию последовательностей: 111-11-11 и 111-1-11-1.
2.11. Вычислить смешанно-периодическую корреляционную функцию при использовании в качестве сигналов последовательностей: 111-111-1 и 111-1-11-1.
2.12. После решения задач 2.6 - 2.11 сравнить все автокорреляционные и смешанно-периодическую корреляционную функции. Сделать вывод, какие функции можно считать «хорошими». Какие КФ имеют наибольшие боковые выбросы?
2.13. После решения задач 2.6 - 2.10 сравнить все взаимные корреляционные функции. Какие максимальные боковые выбросы имеют различные КФ?