8.1. Системы с частотной манипуляцией
8.2. Системы с фазовой манипуляцией
8.3. Эффективность систем передачи дискретных сообщений
8.5. Применение широкополосных сигналов
8.6. Системы с обратной связью
8.8. Борьба с сосредоточенными и по спектру, и по времени помехами
8.1. Системы с частотной манипуляцией
Классическим примером систем передачи дискретных сообщений являются телеграфные системы, широко используемые как в проводных, так и на радиолиниях связи. В этих системах закодированное сообщение передается с помощью сигналов, которые в большинстве случаев представляют собой манипулированные колебания. K наиболее известным видам манипуляции относятся амплитудная, частотная и фазовая манипуляции (AM, ЧМ и ФМ). Амплитудная манипуляция вследствие сравнительно низкой помехоустойчивости имеет ограниченное применение. В настоящее время наибольшее применение нашла частотная манипуляция.
Существуют два основных способа приема сигналов ЧМ: прием по огибающей и прием по мгновенным значениям частоты.
При приеме двоичных сигналов по огибающей они разделяются с помощью узкополосных фильтров Ф, настроенных на частоты этих сигналов ![]() и f
и f![]() , и поступают на безынерционные амплитудные детекторы АД (рис. 8.1). Напряжения, образующиеся на выходе детекторов, сравниваются в схеме вычитания В. Знак выходного напряжения v определяется знаком наибольшего из напряжений, поступающих от детекторов. В решающем устройстве РУ формируется в зависимости от полярности v один из двух сигналов
, и поступают на безынерционные амплитудные детекторы АД (рис. 8.1). Напряжения, образующиеся на выходе детекторов, сравниваются в схеме вычитания В. Знак выходного напряжения v определяется знаком наибольшего из напряжений, поступающих от детекторов. В решающем устройстве РУ формируется в зависимости от полярности v один из двух сигналов ![]() или v2, который соответствует переданному сигналу
или v2, который соответствует переданному сигналу ![]() или u2. Регистрация полярности обычно производится в середине посылки, где уровень сигнала наибольший.
или u2. Регистрация полярности обычно производится в середине посылки, где уровень сигнала наибольший.
Если в качестве фильтров Ф используются согласованные фильтры, то, как легко заметить, в схеме рис. 8.1 будет иметь место оптимальный некогерентный прием двоичных сигналов с неизвестной фазой. В этом случае при воздействии на вход приемника гауссовой помехи помехоустойчивость приема оценивается вероятностью ошибки, определяемой выражением (5.71): ![]()
Для разделения ЧМ сигнала вместо согласованных фильтров часто используются полосовые фильтры с частотной характеристикой, форма которой близка к прямоугольной (рис. в.2). Полоса про- пускания каждого фильтра выбирается примерно равной:
![]() (8.1)
(8.1)

Рис. 8.1. Структурная схема приемника Рис. 8.2 Частотные характеристики
ЧМ сигналов фильтров ЧМ приемника
где ![]() — длительность элементарной посылки. Если на входе приемника действует гауссова помеха, то ее напряжение на выходе амплитудного детектора, где отсутствует сигнал, представляет собой огибающую помехи, которая, как известно, имеет распределение Рэлея (2.44). На выходе второго детектора напряжение отображает огибающую суммарного колебания сигнала и помехи, которая подчиняется закону обобщенного распределения Рэлея (2.49). Если огибающая помехи превысит огибающую суммы сигнала, и помехи, то произойдет ошибка. Нетрудно установить, что в этом случае условия приема аналогичны оптимальному некогерентному приему двоичных сигналов с неизвестной фазой. Поэтому вероятность ошибки здесь также определяется выражением (5.71), в которое, однако, вместо
— длительность элементарной посылки. Если на входе приемника действует гауссова помеха, то ее напряжение на выходе амплитудного детектора, где отсутствует сигнал, представляет собой огибающую помехи, которая, как известно, имеет распределение Рэлея (2.44). На выходе второго детектора напряжение отображает огибающую суммарного колебания сигнала и помехи, которая подчиняется закону обобщенного распределения Рэлея (2.49). Если огибающая помехи превысит огибающую суммы сигнала, и помехи, то произойдет ошибка. Нетрудно установить, что в этом случае условия приема аналогичны оптимальному некогерентному приему двоичных сигналов с неизвестной фазой. Поэтому вероятность ошибки здесь также определяется выражением (5.71), в которое, однако, вместо ![]() необходимо подставить отношение средних мощностей сигнала и помехи на выходе фильтра
необходимо подставить отношение средних мощностей сигнала и помехи на выходе фильтра ![]() . Так как мощность помехи
. Так как мощность помехи ![]() , то,используя выражение (8.1), можно записать
, то,используя выражение (8.1), можно записать
![]() (8.2)
(8.2)
Отсюда следует, что согласованные фильтры обеспечивают примерно двукратный выигрыш по мощности по сравнению с полосовыми фильтрами. Для улучшения помехоустойчивости в схеме с полосовыми фильтрами обычно на выходе схемы вычитания включается фильтр нижних частот, который обеспечивает дополнительное подавление помех.
Схема приема сигналов ЧM по мгновенному значению частоты состоит из ограничителя и линейного частотного детектора (дискриминатора). Напряжение на выходе дискриминатора пропорционально мгновенной частоте входного суммарного колебания сигнала и помехи. Пусть частота сигнала s![]() есть
есть ![]() а частота сигнала
а частота сигнала ![]() равна
равна ![]() Мгновенная частота принятого сигнала составляет сумму частоты переданного сигнала и приращения частоты
Мгновенная частота принятого сигнала составляет сумму частоты переданного сигнала и приращения частоты ![]() за счет воздействия помехи. Очевидно, сигнал s
за счет воздействия помехи. Очевидно, сигнал s![]() будет зарегистрирован неправильно, если
будет зарегистрирован неправильно, если ![]() . Для сигнала s2 условием ошибочного приема является неравенство
. Для сигнала s2 условием ошибочного приема является неравенство ![]() Анализ показывает, что эти методы приема в отношении помехоустойчивости примерно равноценны.
Анализ показывает, что эти методы приема в отношении помехоустойчивости примерно равноценны.
Влияние замираний сигнала можно исследовать методами, рассмотренными в разд. 5.7. Вероятность ошибки при рэлеевских замираниях по аналогии с формулой для некогерентного приема (5.81) определяется выражением
![]() (8.3)
(8.3)
где ![]() — отношение средних мощностей сигнала и помехи.
— отношение средних мощностей сигнала и помехи.
8.2. Системы с фазовой манипуляцией
В последние годы усиленно разрабатывается и внедряется система фазовой манипуляции. Эта система манипуляции является оптимальной когерентной системой передачи двоичных сигналов. По сравнению с ЧМ, применение ФМ обеспечивает при одинаковой помехоустойчивости примерно двукратный выигрыш по мощности и такой же выигрыш по полосе частот, занимаемой сигналом. В двоичных системах ФМ разность фаз манипулированных сигналов выбирается равной 180°.
Поскольку при ФМ необходимо получать информацию о фазе принимаемого сигнала, то здесь обязательно используется метод когерентного приема. На рис. 8.3 приведена структурная схема приемника ФМ, состоящая из полосового фильтра Ф, опорного гетеродина Г, частота и фаза колебаний которого полностью совпадают с частотой и фазой одного из сигналов, фазового детектора ФД, выполняющего роль перемножителя, фильтра нижних частот ФНЧ и решающего устройства РУ. Если напряжения сигналов и колебания гетеродина определяются выражениями:
 (8.4)
(8.4)

Рис. 8.3. Структурная схема приемника ФМ сигналoв
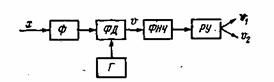
Рис. 8.4. Векторная диаграмма сигналов ФМ и помехи
![]() и
и ![]() то низкочастотное напряжение на выходе ФД будет равно:
то низкочастотное напряжение на выходе ФД будет равно:
 (8.5)
(8.5)
где k — коэффициент передачи детектора. Таким образом, знак выходного напряжения определяется фазой принятого сигнала.
Под воздействием помехи полярность v может изменяться на противоположную, что вызовет ошибку. Очевидно, это произойдет в том случае, если помеха изменит фазу результирующего колебания относительно ее номинального значения на угол, лежащий в интервале от ![]() до
до ![]() (рис. 8.4). Иными словами, сигнал s1 будет принят ошибочно, если результирующий вектор X попадет в нижнюю полуплоскость, расположенную под прямой cod. Соответственно сигнал s2 будет искажен при попадании вектора X в верхнюю полуплоскость, расположенную над прямой cod.
(рис. 8.4). Иными словами, сигнал s1 будет принят ошибочно, если результирующий вектор X попадет в нижнюю полуплоскость, расположенную под прямой cod. Соответственно сигнал s2 будет искажен при попадании вектора X в верхнюю полуплоскость, расположенную над прямой cod.
Если в схеме рис.8.3 заменить ФНЧ на интегратор, то она будет совпадать со схемой, оптимального приема двоичных сигналов (рис. 6.5). Действительно, показанный на рис.5.5 генератор разности сигналов Δs вырабатывает колебание, пропорциональное uг(t):
![]() (8.6)
(8.6)
Отсюда следует, что помехоустойчивость приемника ФМ с интегратором равна потенциальной помехоустойчивости. В системе ФМ применяются противоположные сигналы ![]() для которых коэффициент взаимной корреляции
для которых коэффициент взаимной корреляции ![]() =-1 (см.5.52). Вероятность ошибки в этом случае определяется на основании выражения: (5.53):
=-1 (см.5.52). Вероятность ошибки в этом случае определяется на основании выражения: (5.53):
![]() (8-7)
(8-7)
Как известно, при оптимальном приеме сигналов ФМ в присутствии гауссовых помех предварительная фильтрация сигналов до фазового детектора не является обязательной, однако в реальных приемниках для уменьшения влияния помех других видов обычно используют, как показано на рис.8.3, полосовые фильтры Ф с полосой пропускания ![]()
Если вместо интегратора применяется ФНЧ, полоса пропускания которого выбирается примерно равной ![]() , то это эквивалентно тому, что шумовая полоса до фазового детектора
, то это эквивалентно тому, что шумовая полоса до фазового детектора ![]() .В этом случае отношение q определяется выражением(8.2), а вероятность ошибки— ф-лой (8.7), где вместо
.В этом случае отношение q определяется выражением(8.2), а вероятность ошибки— ф-лой (8.7), где вместо ![]() подставляется q.
подставляется q.
В условиях рэлеевских замираний помехоустойчивость схемы ФМ с интегратором характеризуется вероятностью ошибки, которая находится по ф-ле (5.80), если в последней положить ![]()
 (8.8)
(8.8)
В случае применения Ф,НЧ ![]() .
.
Для обеспечения нормальной работы приемника ФМ фаза колебания гетеродина должна с высокой точностью совпадать с фазой одного из сигналов. Из выражения (8.5) легко определить, что при наличии фазовой расстройки ![]() напряжение
напряжение ![]() уменьшается пропорционально
уменьшается пропорционально ![]() . Например, если
. Например, если ![]() то
то ![]() и отношение сигнала к помехе
и отношение сигнала к помехе
по мощности падает в два раза, т. е. полностью теряется выигрыш по сравнению с ЧМ. Этим объясняются жесткие требования, предъявляемые к работе гетеродина. В системах ФМ колебания гетеродина иногда синхронизируются специально передаваемым сигналом. Однако такой путь ведет к дополнительным затратам мощности, и ФМ также частично теряет свои преимущества. Другой путь заключается в том, что для целей синхронизации используется сам принимаемый сигнал. Однако при равновероятных сигналах ![]() (t) и sz(t) невозможно установить, фазу какого сигнала следует принять в качестве опорной. Это приводит к тому, что фаза когерентного напряжения фг имеет два номинальных состояния: 0 .и 180°. В результате воздействия помех в канале система синхронизации % может переходить случайным образом из одного состояния в другое. Как следует из (8.5), скачок фазы на 180° изменяет знак выходного напряжения и. Появляется так называемая «обратная» работа (положительные посылки изменяются на отрицательные и наоборот). Этот недостаток устраняется в системах относительной фазовой манипуляции (ОФМ), впервые предложенных Н. Т. Петровичем.
(t) и sz(t) невозможно установить, фазу какого сигнала следует принять в качестве опорной. Это приводит к тому, что фаза когерентного напряжения фг имеет два номинальных состояния: 0 .и 180°. В результате воздействия помех в канале система синхронизации % может переходить случайным образом из одного состояния в другое. Как следует из (8.5), скачок фазы на 180° изменяет знак выходного напряжения и. Появляется так называемая «обратная» работа (положительные посылки изменяются на отрицательные и наоборот). Этот недостаток устраняется в системах относительной фазовой манипуляции (ОФМ), впервые предложенных Н. Т. Петровичем.
B системах ОФМ информация передается не абсолютным, а относительным значением фазы, которое вычисляется как разность фаз между передаваемым в данный момент и предыдущим сигналами ![]() . Поэтому такой способ фазовой манипуляции называют также фазоразностной манипуляцией (ФРМ). При передаче положительной .посылки фазы передаваемого и 'предыдущего сигналов совпадают, т. е. Δφ=0°, а в случае отрицательной посылки разность фаз Δφ =180°.
. Поэтому такой способ фазовой манипуляции называют также фазоразностной манипуляцией (ФРМ). При передаче положительной .посылки фазы передаваемого и 'предыдущего сигналов совпадают, т. е. Δφ=0°, а в случае отрицательной посылки разность фаз Δφ =180°.
Существует несколько методов детектирования сигналов ОФМ. Простейшим из них является автокорреляционный метод (метод сравнения фаз), который реализуется структурной схемой, приведенной на рис. 8.5. В фазовом детекторе производится сравнение фаз передаваемого сигналя s(t) и предыдущего сигнала ![]() , где
, где ![]() — длительность элементарного сигнала. Запаздывающий сигнал
— длительность элементарного сигнала. Запаздывающий сигнал ![]() образуется на выходе цепи задержки, которая рассчитана на время задержки
образуется на выходе цепи задержки, которая рассчитана на время задержки ![]() .
.
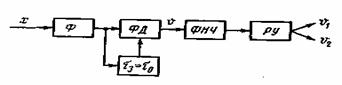
Рис. 8.5. Структурная схема автокорреляционного приемника сигналов ОФМ
Напряжение v ,на выходе фазового детектора автокорреляционного приемника ОФМ определяется выражением, аналогичным (8,5) для ФМ, с тем лишь отличием, что вместо paзности фаз ![]() подставляется разность фаз двух соседних сигналов
подставляется разность фаз двух соседних сигналов ![]() Так как здесь в качестве опорного напряжения используется непосредственно принимаемый сигнал, то появление «обратной работы» принципиально исключается. Анализ показывает, что гари воздействии флуктуационных помех вероятность ошибки при автокорреляционном методе приема равная
Так как здесь в качестве опорного напряжения используется непосредственно принимаемый сигнал, то появление «обратной работы» принципиально исключается. Анализ показывает, что гари воздействии флуктуационных помех вероятность ошибки при автокорреляционном методе приема равная
![]() (8.9)
(8.9)
где q определяется выражением (8.2), в которым ![]() — полоса пропускания фильтра Ф ,(рис.8.5). Здесь так же, как и в системе ЧМ, возможно повышение помехоустойчивости путем применения согласованного фильтра. При этом вероятность ошибки
— полоса пропускания фильтра Ф ,(рис.8.5). Здесь так же, как и в системе ЧМ, возможно повышение помехоустойчивости путем применения согласованного фильтра. При этом вероятность ошибки
![]() (8.10)
(8.10)
Автокорреляционный метод приема сигналов ОФМ позволяет получить двукратный выигрыш по мощности по сравнению с системой ЧМ, что следует из ф-л (6.71), (8.9) и (8.10).
Нетрудно заметить, что при автокорреляционном приеме сведения о начальной фазе сигнала не используются. Для сохранения номинальных значений ![]() , 180° необходимо только, чтобы линия задержки обеспечивала фазовый сдвиг сигнала, кратный 2
, 180° необходимо только, чтобы линия задержки обеспечивала фазовый сдвиг сигнала, кратный 2![]() .
.
Структурная схема корреляционного приемника сигналов ОФМ приведена на рис. 8.6.
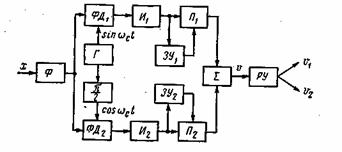
Рис. 8.6. Структурная схема корреляционного приемника сигналов ОФМ
Принимаемый сигнал s(t) = Usin(![]() )сравнивается по фазе с колебаниями опорного гетеродина sin
)сравнивается по фазе с колебаниями опорного гетеродина sin![]() и cos
и cos![]() Полученные на выходе ФД
Полученные на выходе ФД![]() и ФД
и ФД![]() напряжения Ucos
напряжения Ucos![]() и Usin
и Usin![]() интегрируются на интервале то, запоминаются в запоминающих устройствах ЗУ1 и ЗУ2, а затем через интервал
интегрируются на интервале то, запоминаются в запоминающих устройствах ЗУ1 и ЗУ2, а затем через интервал ![]() -перемножаются с последующими отсчетами напряжения на интеграторах в перемножителях П1 и П2. Напряжение на выходе сумматора после приема i-гo сигнала равно:
-перемножаются с последующими отсчетами напряжения на интеграторах в перемножителях П1 и П2. Напряжение на выходе сумматора после приема i-гo сигнала равно:

Отсюда следует, что знак выходного напряжения определяется разностью фаз передаваемого и предыдущего сигналов.
Корреляционный метод приема обеспечивает помехоустойчивость в отношении флуктуационных помех такую же, как и автокорреляционный при использовании согласованного фильтра дофазового детектора. Вероятность ошибки находится из (8.10).
Здесь, так же как и в случае автокорреляционного приема, знание начальной фазы сигнала не является обязательным; однако требуется, чтобы частота колебаний опорного гетеродина точно совпадала с частотой сигнала ![]()
Рассмотрим теперь когерентный метод приема (метод сравнения полярностей). Он заключается в том, что принятый сигнал сначала детектируется так же, как и три ФМ,
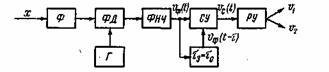
Рис. 8.7. Структурная схема когерентного приемника сигналов ОФМ
а затем поступает в схему сравнения. При этом сравниваются уже не фазы, а полярности посылок, полученных на выходе ФД. Структурная схема такого приемника показана на рис.8.7. Для сравнения полярностей посылок используются цепь задержки и сравнивающее устройство СУ, на выходе которого образуется положительное напряжение, если предыдущая и настоящая посылки имеют одинаковую полярность, и отрицательное напряжение, когда полярности соседних посылок различные.
Иными словами, если посылки разных полярностей обозначить через 0 и 1, то сравнивающее устройство можно расценивать как сумматор по модулю два.
В рассматриваемой схеме колебания гетеродина Г синхронизируются по фазе принимаемым сигналом при помощи системы синхронизации.
Таблица 8.1
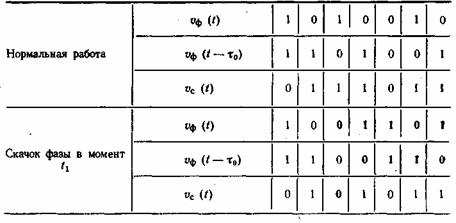
Здесь фаза колебаний гетеродина также неоднозначна и имеет два устойчивых состояния 0 и 180°, однако, в отличие от схемы ФМ, переход фазы под воздействием помех из одного состояния в другое не приводит к обратной работе. Для пояснения указанной особенности в табл. 8.1. записаны последовательности посылок ![]() и
и ![]() поступающих в сравнивающее устройство, я результат сравнения на его выходе vc(t). Сначала рассматривается случай, когда гетеродин работает нормально без скачков фазы. Затем приведены те же последовательности при скачке фазы колебаний гетеродина в момент времени t
поступающих в сравнивающее устройство, я результат сравнения на его выходе vc(t). Сначала рассматривается случай, когда гетеродин работает нормально без скачков фазы. Затем приведены те же последовательности при скачке фазы колебаний гетеродина в момент времени t![]() .
.
Скачок фазы вызывает изменение полярности посылок на выходе фильтра нижних частот ![]() но так как через интервал то меняется и знак посылок
но так как через интервал то меняется и знак посылок ![]() то результат сравнения vc(t), за исключением одной посылки, оказывается правильным.
то результат сравнения vc(t), за исключением одной посылки, оказывается правильным.
Определим теперь вероятность ошибки t![]() при когерентном приеме сигналов OФM, пренебрегая одиночными ошибками за счет скачка фазы колебаний гетеродина. Поскольку результат сравнения зависит от полярности двух соседних посылок на выходе ФНЧ, то ошибка будет иметь место, если предыдущая посылка принята ошибочно, а настоящая правильно или, наоборот, предыдущая — правильно, а настоящая — ошибочно. Вероятность каждого из этих событий, если ошибки следуют независимо, очевидно, равна произведению
при когерентном приеме сигналов OФM, пренебрегая одиночными ошибками за счет скачка фазы колебаний гетеродина. Поскольку результат сравнения зависит от полярности двух соседних посылок на выходе ФНЧ, то ошибка будет иметь место, если предыдущая посылка принята ошибочно, а настоящая правильно или, наоборот, предыдущая — правильно, а настоящая — ошибочно. Вероятность каждого из этих событий, если ошибки следуют независимо, очевидно, равна произведению ![]() где
где ![]() — вероятность ошибки в посылках на выходе ФНЧ, а суммарная вероятность ошибок на выходе сравнивающего устройства
— вероятность ошибки в посылках на выходе ФНЧ, а суммарная вероятность ошибок на выходе сравнивающего устройства
![]() (8.11)
(8.11)
Легко понять, что появление ошибок в обеих сравниваемых посылках не дает ошибочного результата, так как эти ошибки взаимно компенсируются.
Из рассмотрения схем на рис.8.3 .и 8.7 видно, что величина ![]() совпадает с вероятностью ошибки при приеме сигналов ФМ. Отсюда, подставляя выражение (8.7) в ф-лу (8.11), получим вероятность ошибки при когерентном приеме сигналов ОФМ
совпадает с вероятностью ошибки при приеме сигналов ФМ. Отсюда, подставляя выражение (8.7) в ф-лу (8.11), получим вероятность ошибки при когерентном приеме сигналов ОФМ
![]() (8.12)
(8.12)
где q — та же величина, что и в системе ФМ.
Если вместо ФНЧ используется интегратор, то в ф-ле (8.12) q=q0.
В заключение необходимо отметить, что относительные методы приема могут с успехом использоваться не только в системах фазовой манипуляции, но также и в случае амплитудной и частотной манипуляций. Особенно эффективно их применение в каналах: с замираниями, где абсолютные значения модулируемых параметров сигнала подвергаются случайным изменениям. Это объясняется тем, что для относительных методов важны, не абсолютные значения параметров, а их различие в соседних элементах сигнала.
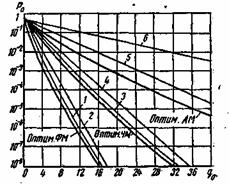
Рис. 8.8. Зависимость вероятности ошибки от отношения сигнала к помехе для различных систем манипуляции
При достаточно малой длительности элементарных сигналов по сравнению с интервалом корреляции замираний эти различия определяются в основном манипуляцией и слабо зависят от замираний.
Для сравнительной оценки помехоустойчивости различных систем манипуляции на рис.8.8 приведены графики, отражающие зависимость вероятности ошибки ![]() от
от ![]() Жирными линиями проведены кривые, рассчитанные по ф-ле (5.53), которая соответствует потенциальной помехоустойчивости при оптимальном приеме ФМ, ЧМ и AM. Остальные кривые характеризуют следующие виды приема: 1 — когерентный метод ОФМ с интегратором по нч, 2 — автокорреляционный метод ОФМ с согласованным фильтром по вч и корреляционный метод ОФМ, 3 — когерентный метод ОФМ с ФНЧ(
Жирными линиями проведены кривые, рассчитанные по ф-ле (5.53), которая соответствует потенциальной помехоустойчивости при оптимальном приеме ФМ, ЧМ и AM. Остальные кривые характеризуют следующие виды приема: 1 — когерентный метод ОФМ с интегратором по нч, 2 — автокорреляционный метод ОФМ с согласованным фильтром по вч и корреляционный метод ОФМ, 3 — когерентный метод ОФМ с ФНЧ(![]() )- автокорреляционный метод ОФМ с полосовым фильтром по вч (
)- автокорреляционный метод ОФМ с полосовым фильтром по вч (![]() ) ЧМ с согласованными фильтрами по вч, 5 — ЧМ с полосовыми фильтрами по вч (
) ЧМ с согласованными фильтрами по вч, 5 — ЧМ с полосовыми фильтрами по вч (![]() ) и 6 — AM. с полосовыми фильтрами по вч(
) и 6 — AM. с полосовыми фильтрами по вч(![]() )
)
Наилучшей помехоустойчивостью обладает система ФМ. Помехоустойчивость систем ОФМ близка к помехоустойчивости ФМ. При этом корреляционный и автокорреляционный методы приема несколько уступают когерентному; далее следуют системы ЧМ, и замыкает ряд система AM, которая имеет наиболее низкую помехоустойчивость.
8.3. Эффективность систем передачи дискретных сообщений
Эффективность систем передачи дискретных сообщений может быть оценена коэффициентами, приведенными в §6.14. Для систем телеграфной связи важнейшими показателями эффективности являются коэффициент использования мощности сигнала ![]() и коэффициент использования полосы частот канала
и коэффициент использования полосы частот канала![]() . По определению (6.99) коэффициент использования мощности сигнала
. По определению (6.99) коэффициент использования мощности сигнала
![]() (8.13) Подставляя в ф-лу (8.13) максимальную скорость передачи информации R, равную пропускной способности двоичного канала (6.58), получим зависимость максимального коэффициента использования мощности от параметров Р0и
(8.13) Подставляя в ф-лу (8.13) максимальную скорость передачи информации R, равную пропускной способности двоичного канала (6.58), получим зависимость максимального коэффициента использования мощности от параметров Р0и ![]()
![]() (8.14)
(8.14)
где ![]()
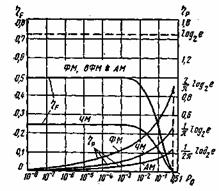
Рис. 8.9. Зависимость эффективности ![]() и
и ![]() от вероятности ошибки Р0
от вероятности ошибки Р0
Поскольку для каждого вида манипуляции и метода приема эти параметры взаимосвязаны, то ![]() можно представить как функцию только одной переменной Р0. На рис. 8.9 показаны зависимости
можно представить как функцию только одной переменной Р0. На рис. 8.9 показаны зависимости ![]() (Р0) для оптимальных методов приема ФМ, ЧМ и AM сигналов, построенные по ф-ле (8.14),с использованием выражения (5.53). Как и следовало ожидать, наилучшим образом используется мощность в системе ФМ. Для всех систем манипуляции коэффициент
(Р0) для оптимальных методов приема ФМ, ЧМ и AM сигналов, построенные по ф-ле (8.14),с использованием выражения (5.53). Как и следовало ожидать, наилучшим образом используется мощность в системе ФМ. Для всех систем манипуляции коэффициент ![]() достигает наибольшего значения три стремлении
достигает наибольшего значения три стремлении
К ![]() к величине 0,5, что соответствует
к величине 0,5, что соответствует ![]() . Таким образом, с целью повышения скорости передачи информации при заданном отношении
. Таким образом, с целью повышения скорости передачи информации при заданном отношении ![]() необходимо уменьшать длительность посылок
необходимо уменьшать длительность посылок![]() , т. е. повышать скорость работы. Естественно, что в этом случае предполагается применять помехоустойчивое кодирование, которое должно обеспечить высокую достоверность приема сообщений даже при значениях Р0, близких к 0,5.
, т. е. повышать скорость работы. Естественно, что в этом случае предполагается применять помехоустойчивое кодирование, которое должно обеспечить высокую достоверность приема сообщений даже при значениях Р0, близких к 0,5.
Уменьшение длительности посылок ![]() 0 приводит к расширению спектра сигнала. Аналогичная картина имеет место и для непрерывных сообщений, скорость передачи которых максимальна при стремлении F к бесконечности (6.89). Предельное значение
0 приводит к расширению спектра сигнала. Аналогичная картина имеет место и для непрерывных сообщений, скорость передачи которых максимальна при стремлении F к бесконечности (6.89). Предельное значение ![]() на рис. 8.9 показано пунктиром.
на рис. 8.9 показано пунктиром.
Коэффициент использования полосы частот двоичного канала определяется как
![]() (8.15)
(8.15)
где F — полоса частот, занимаемая сигналом.
Как было отмечено выше, минимальная ширина спектра вч сигналов в системах ФМ, ОФМ и AM равна ![]() , а в системе ЧМ —в два раза шире
, а в системе ЧМ —в два раза шире ![]() .Для этих значений F на рис. 8.9 приведены графики зависимостей (8.15). Наилучшим образом полоса используется при
.Для этих значений F на рис. 8.9 приведены графики зависимостей (8.15). Наилучшим образом полоса используется при ![]() , что соответствует максимальным значениям
, что соответствует максимальным значениям ![]() при ФМ, ОФМ и AM, и
при ФМ, ОФМ и AM, и ![]() при ЧМ.
при ЧМ.
Из сравнения графиков рис. 8.9 следует, что улучшение использования мощности сигналов может быть достигнуто ценой ухудшения использования полосы частот канала и наоборот.
8.4. Параллельная передача
Одним из наиболее эффективных способов повышения достоверности принимаемой информации является многократная ее передача по различным каналам. Она может осуществляться как путем одновременной передачи одних и тех же сообщений по нескольким параллельным каналам, так и путем многократного повторения сообщений по одному каналу, который в этом случае представляет собой множество парциальных каналов, разделенных по времени.
Очевидно, чем меньше корреляция между условиями работы каналов, тем меньше вероятность одновременного нарушения связи во всех каналах при передаче данного сообщения. В этом смысле более надежной является система параллельной передачи информации.
Если вероятность нарушения нормальной работы любого из параллельных каналов связи ![]() , то при отсутствии корреляции между условиями работы каналов вероятность одновременного выхода из строя п каналов равна
, то при отсутствии корреляции между условиями работы каналов вероятность одновременного выхода из строя п каналов равна ![]() . Отсюда видно, что достоверность многократной передачи существенно возрастает с увеличением числа каналов п.
. Отсюда видно, что достоверность многократной передачи существенно возрастает с увеличением числа каналов п.
Определим теперь вероятность ошибки Роп при передаче двоичных сигналов по п независимым каналам. Будем полагать, что в приемном устройстве решение выносится по правилу большинства, т. е. считается переданным тот из двух сигналов 0 или 1, который в п принятых сигналах составляет большинство. Для того чтобы устранить возможную неопределенность при вынесении решения, п выбирается, как правило, нечетным, т. е. n=2k - 1, где k=1,2, 3, ... B этом случае вероятность ошибки Роп равна вероятности того, что в k или большем числе каналов символы зарегистрированы с ошибкой. Если Ро— вероятность ошибки в каждом из каналов, то, учитывая количество всевозможных ошибочных сочетаний, получим
![]()
Например, при n=3 и Р0=10![]() вероятность ошибки примерно равна
вероятность ошибки примерно равна![]()
![]() , т. е. помехоустойчивость приема существенно улучшается. Очевидно, это улучшение достигается за счет снижения скорости передачи. Действительно, как в параллельных каналах, так и каналах, разнесенных по времени, многократная передача сообщений ведет к снижению скорости работы системы связи в п раз, что является главным недостатком этих систем. Поэтому такой способ повышения достоверности передачи сообщений находит применение на ответственных линиях связи или в тех случаях, когда частые нарушения связи специфичны для данного канала. К подобного рода каналам, как известно, относятся каналы с переменными параметрами, в которых имеют место мультипликативные помехи, значительно снижающие помехоустойчивость системы связи. В системах радиосвязи каналы с переменными параметрами являются основным типом каналов. Мультипликативные помехи здесь проявляются в виде замираний.
, т. е. помехоустойчивость приема существенно улучшается. Очевидно, это улучшение достигается за счет снижения скорости передачи. Действительно, как в параллельных каналах, так и каналах, разнесенных по времени, многократная передача сообщений ведет к снижению скорости работы системы связи в п раз, что является главным недостатком этих систем. Поэтому такой способ повышения достоверности передачи сообщений находит применение на ответственных линиях связи или в тех случаях, когда частые нарушения связи специфичны для данного канала. К подобного рода каналам, как известно, относятся каналы с переменными параметрами, в которых имеют место мультипликативные помехи, значительно снижающие помехоустойчивость системы связи. В системах радиосвязи каналы с переменными параметрами являются основным типом каналов. Мультипликативные помехи здесь проявляются в виде замираний.
В настоящее время существуют различные методы борьбы с замираниями, из них наибольшее распространение получили методы разнесенного приема, которые можно рассматривать как разновидность передачи по параллельным каналам. B отличие от рассмотренных выше систем параллельной передачи, при разнесенном приеме параллельные каналы образуются на приеме путем разнесения сигналов. В такой системе передается только один сигнал, а прием осуществляется несколькими антеннами, разнесенными в пространстве (пространственно-разнесенный прием), либо антеннами с различной поляризацией (поляризационно-разнесенный прием), либо антеннами с разными диаграммами направленности (разнесение по углу прихода лучей сигнала). B диапазоне кв и укв наиболее распространенным является пространственно-разнесенный прием. Эффективность любого метода разнесения сигналов зависит от степени корреляции между ними. С увеличением корреляции вероятность одновременных глубоких замираний для всех разнесенных сигналов повышается. Исследования показывают, что если коэффициент корреляции ![]() , то эффективность работы систем разнесенного приема заметно падает. Поэтому разнесение осуществляется таким образом, чтобы замирания сигналов в различных ветвях разнесения по возможности происходили независимо.
, то эффективность работы систем разнесенного приема заметно падает. Поэтому разнесение осуществляется таким образом, чтобы замирания сигналов в различных ветвях разнесения по возможности происходили независимо.
Помехоустойчивость систем разнесенного приема, в значительной степени определяется способом формирования выходного результирующего сигнала из принятых разнесенных сигналов. Здесь различают способы, основанные на автовыборе и сложении разнесенных сигналов.
В системах с автовыбором из всех разнесенных сигналов используется только один.
В системах сложения результирующий сигнал образуется путем суммирования по определенному закону всех разнесенных сигналов. Если сложение осуществляется то высокой частоте или после когерентного детектирования, то такое сложение называется когерентным.
В общем случае по ветвям разнесения приходят высокочастотные сигналы с разными задержками и, следовательно, с разными фазами. Для того чтобы в системе сложения сигналы суммировались арифметически, необходимо прежде всего привести их к одинаковой фазе. Это осуществляется специальной системой фазовой автоподстройки. В результате сигналы во всех ветвях можно считать одинаковыми: S![]() (t)=s(t). Тогда на выходе системы сложения получаем
(t)=s(t). Тогда на выходе системы сложения получаем
![]()
где п — число ветвей разнесения и ![]() —коэффициент передачи i-й ветви разнесения.
—коэффициент передачи i-й ветви разнесения.
Наиболее простым способом сложения является линейное. В этом случае все коэффициенты ![]() , а результирующий сигнал
, а результирующий сигнал ![]() представляет собой сумму напряжений всех ветвей разнесения. Лучшими характеристиками обладает система оптимального сложения, в которой коэффициенты
представляет собой сумму напряжений всех ветвей разнесения. Лучшими характеристиками обладает система оптимального сложения, в которой коэффициенты ![]() зависят от соотношения сигнала к помехе и выбираются равными :
зависят от соотношения сигнала к помехе и выбираются равными :
Эффективность применения систем разнесенного приема удобно оценивать величиной выигрыша в мощности сигнала по сравнению с одинарным приемом при фиксированной величине ошибки.
Величина выигрыша зависит от метода формирования результирующего сигнала и числа ветвей разнесения п. Наибольший выигрыш обеспечивает оптимальное сложение, однако более простое лилейное сложение отличается от него незначительно. Для систем автовыбора выигрыш заметно меньше. Известны комбинированные системы, в которых совместно используются линейное сложение и автовыбор. По своим характеристикам такие системы близки к оптимальным.
8.5. Применение широкополосных сигналов
Передача дискретных сообщений посредством AM, ЧМ или ФМ (OФM) осуществляется обычно простыми сигналами, база которых v=2TF (2.1) не превышает нескольких единиц. Такие сигналы являются узкополосными, так как ширина спектра передаваемого сигнала F по порядку величины равна ширине спектра исходного сигнала ![]() (где Т — длительность одного исходного сигнала). Вместе с тем в настоящее время применяются системы, где используются сложные широкополосные сигналы с базой в несколько сотен или даже тысяч и с шириной спектра F>>Fm. Один из способов расширения спектра передаваемого сигнала состоит в том, что исходному сигналу ставится в соответствие сложный сигнал, состоящий из большого числа п элементарных сигналов длительностью
(где Т — длительность одного исходного сигнала). Вместе с тем в настоящее время применяются системы, где используются сложные широкополосные сигналы с базой в несколько сотен или даже тысяч и с шириной спектра F>>Fm. Один из способов расширения спектра передаваемого сигнала состоит в том, что исходному сигналу ставится в соответствие сложный сигнал, состоящий из большого числа п элементарных сигналов длительностью ![]() Так как
Так как ![]() то база передаваемого сигнала v= 2TF=n>>1. Существуют и другие способы формирования широкополосных сигналов, основанные на применении специальных видов модуляции. Основные достоинства широкополосных сигналов, вызывающие повышенный интерес к ним в последние годы, заключаются в том, что такие сигналы позволяют эффективно бороться с влиянием многолучевости и сосредоточенными по спектру помехами. В многолучевых каналах, где результирующий сигнал в месте приема представляет собой сумму сигналов отдельных лучей (5.74), помимо общих замираний, обусловленных интерференцией этих лучей, возможна также межсимвольная интерференция. Она заключается в том, что вследствие больших запаздываний лучей относительно друг друга происходит перекрытие сигналов соседних символов. Если эти символы разные и запаздывание одного порядка с длительностью соответствующих им сигналов, то возможны значительные искажения, снижающие помехоустойчивость связи. Поясним это на примере двоичной системы, приемное устройство которой состоит из двух согласованных фильтров и решающей схемы (см. рис. 5.7). Напомним, что выходное напряжение согласованного фильтра, обусловленное принятым полезным сигналом, представляет собой функцию автокорреляции сигнала
то база передаваемого сигнала v= 2TF=n>>1. Существуют и другие способы формирования широкополосных сигналов, основанные на применении специальных видов модуляции. Основные достоинства широкополосных сигналов, вызывающие повышенный интерес к ним в последние годы, заключаются в том, что такие сигналы позволяют эффективно бороться с влиянием многолучевости и сосредоточенными по спектру помехами. В многолучевых каналах, где результирующий сигнал в месте приема представляет собой сумму сигналов отдельных лучей (5.74), помимо общих замираний, обусловленных интерференцией этих лучей, возможна также межсимвольная интерференция. Она заключается в том, что вследствие больших запаздываний лучей относительно друг друга происходит перекрытие сигналов соседних символов. Если эти символы разные и запаздывание одного порядка с длительностью соответствующих им сигналов, то возможны значительные искажения, снижающие помехоустойчивость связи. Поясним это на примере двоичной системы, приемное устройство которой состоит из двух согласованных фильтров и решающей схемы (см. рис. 5.7). Напомним, что выходное напряжение согласованного фильтра, обусловленное принятым полезным сигналом, представляет собой функцию автокорреляции сигнала ![]() Отсюда длительность выходного сигнала
Отсюда длительность выходного сигнала ![]() определяется интервалом корреляции сигнала, который примерно равен
определяется интервалом корреляции сигнала, который примерно равен ![]() Для узкополосных сигналов
Для узкополосных сигналов ![]() и длительность выходного напряжения одного порядка с длительностью элементарного сообщения
и длительность выходного напряжения одного порядка с длительностью элементарного сообщения ![]() . На рис. 8.10.а в качестве примера показаны огибающие напряжений на выходе согласованных фильтров при приеме двоичной последовательности 1011, когда сигнал является узкополосным и образован тремя лучами. Сплошными линиями показаны напряжения, соответствующие первому лучу, а пунктиром — напряжения, относящиеся к двум другим лучам. Из рисунка видно, что в момент отсчета максимального значения напряжения первого луча на противоположном фильтре существуют напряжения от других лучей. Происходит перекрытие сигналов, поступающих на решающее устройство одновременно с двух фильтров, и вероятность ошибки резко возрастает. Это обстоятельство ограничивает скорость передачи информации, так как для нормальной работы необходимо, чтобы длительность элемента сообщения Т во много раз превышала максимальное запаздывание лучей относительно друг друга
. На рис. 8.10.а в качестве примера показаны огибающие напряжений на выходе согласованных фильтров при приеме двоичной последовательности 1011, когда сигнал является узкополосным и образован тремя лучами. Сплошными линиями показаны напряжения, соответствующие первому лучу, а пунктиром — напряжения, относящиеся к двум другим лучам. Из рисунка видно, что в момент отсчета максимального значения напряжения первого луча на противоположном фильтре существуют напряжения от других лучей. Происходит перекрытие сигналов, поступающих на решающее устройство одновременно с двух фильтров, и вероятность ошибки резко возрастает. Это обстоятельство ограничивает скорость передачи информации, так как для нормальной работы необходимо, чтобы длительность элемента сообщения Т во много раз превышала максимальное запаздывание лучей относительно друг друга ![]()
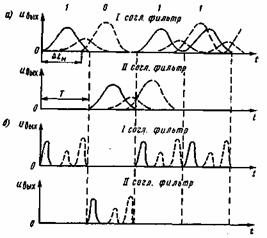
Рис. 8.10. Отклики на выходе согласованных фильтров в двоичной системе: многолучевых узкополосных (а) и широкополосных (б) сигналов
Иная картина наблюдается в случае широкополосных сигналов, когда v>>1 и ![]() <<T (рис. 8.106). Сигналы на выходе в этом случае не перекрываются, если.
<<T (рис. 8.106). Сигналы на выходе в этом случае не перекрываются, если. ![]() <T. Это условие является менее жестким, и поэтому представляется возможным значительно повысить скорость работы по сравнению с узкополосными системами. Разделение лучей в широкополосных системах устраняет интерференцию между ними, т. е. одну из причин, вызывающих замирания сигналов. Более того, здесь можно посредством дополнительной обработки сложить все разделенные лучи и таким образом использовать многолучевость для повышения помехоустойчивости.
<T. Это условие является менее жестким, и поэтому представляется возможным значительно повысить скорость работы по сравнению с узкополосными системами. Разделение лучей в широкополосных системах устраняет интерференцию между ними, т. е. одну из причин, вызывающих замирания сигналов. Более того, здесь можно посредством дополнительной обработки сложить все разделенные лучи и таким образом использовать многолучевость для повышения помехоустойчивости.
Рассмотрим работу систем с широкополосными сигналами при воздействии аддитивных помех. На первый взгляд применение широкополосных сигналов представляется нецелесообразным, так как оно приводит к увеличению мощности помех в полосе сигнала и повышает вероятность взаимных помех между соседними по спектру сигналами. Однако это не совсем так. При оптимальном приеме дискретных сообщений помехоустойчивость в канале с гауссовыми шумами, как известно, определяется только отношением энергии сигнала к спектральной плотности помех ![]() , т. е. не зависит от ширины спектра сигнала. Следовательно, помехоустойчивость узкополосных и широкополосных систем при флуктуационных помехах одинакова. Если прием осуществляется с помощью фильтра, согласованного с широкополосным сигналом, имеющим равномерный спектр в полосе F, то согласно (4.35) коэффициент передачи фильтра k(f) можно принять равным 1 в полосе F и считать k(f)=0 на других частотах. Тогда в соответствии с (4.34) отношение мощностей сигнала и шума на выходе согласованного фильтра
, т. е. не зависит от ширины спектра сигнала. Следовательно, помехоустойчивость узкополосных и широкополосных систем при флуктуационных помехах одинакова. Если прием осуществляется с помощью фильтра, согласованного с широкополосным сигналом, имеющим равномерный спектр в полосе F, то согласно (4.35) коэффициент передачи фильтра k(f) можно принять равным 1 в полосе F и считать k(f)=0 на других частотах. Тогда в соответствии с (4.34) отношение мощностей сигнала и шума на выходе согласованного фильтра
![]() (8.16)
(8.16)
что совпадает с выражением (4.3). Получаемый при этом выигрыш в n раз обусловлен тем, что здесь так же, как и при синхронном накоплении, в результате обработки сложного сигнала и помехи в согласованном фильтре все п-элементарных сигналов складываются по напряжению, а помеха — по мощности.
При воздействии сосредоточенной по спектру помехи, а такой помехой является любой узкополосный сигнал, находящийся в полосе F, все спектральные составляющие помехи пройдут на выход согласованного фильтра. Следовательно, подставляя в (8.16), вместо Рш мощность сосредоточенной помехи Рп, получим
![]()
Если в спектре сигнала расположено m независимых сосредоточенных помех, то, очевидно,
 (8.17)
(8.17)
Отсюда следует, что отношение сигнала к помехе при прочих равных условиях прямо пропорционально ширине спектра сигнала F. Таким образом, широкополосные сигналы позволяют более эффективно бороться с помехами, сосредоточенными но спектру, чем узкополосные сигналы. Здесь, конечно, нужно иметь в виду, что если за счет увеличения m суммарная мощность помех растет пропорционально F, то расширение спектра сигнала выигрыша не дает
Преимущества широкополосных систем связи отчетливей выявляются при более общей постановке вопроса о взаимном влияний между сигналами. В ряде случаев передача информации по радиоканалам затрудняется в связи с большой перегруженностью используемых диапазонов частот. В реальных условиях приходится учитывать неизбежное по разным причинам нарушение регламентации частот, выделяемых для каждого сигнала. Часто имеет место одновременная передача сигналов с взаимно перекрывающимися спектрами. Предельным случаем является ситуация, когда вообще отсутствует какая-либо регламентация частот. Предположим, что в диапазоне частот ![]() одновременно передается п узкополосных сигналов, каждый из которых с одинаковой вероятностью может находиться в любом месте диапазона. Вычислим при этих условиях отношение сигнала к помехе при передаче дополнительного узкополосного или широкополосного сигнала. Для упрощения будем полагать, что все п узкополосных сигналов обладают одинаковой мощностью РП и имеют одну и ту же полосу частот
одновременно передается п узкополосных сигналов, каждый из которых с одинаковой вероятностью может находиться в любом месте диапазона. Вычислим при этих условиях отношение сигнала к помехе при передаче дополнительного узкополосного или широкополосного сигнала. Для упрощения будем полагать, что все п узкополосных сигналов обладают одинаковой мощностью РП и имеют одну и ту же полосу частот
![]() с равномерным энергетическим спектром
с равномерным энергетическим спектром ![]() . Если спектр принимаемого узкополосного сигнала, полоса которого также равна F
. Если спектр принимаемого узкополосного сигнала, полоса которого также равна F![]() , полностью перекрывается k мешающими сигналами, то отношение сигнала .к помехе на выходе согласованного фильтра в соответствии с 1(8.17) будет равно:
, полностью перекрывается k мешающими сигналами, то отношение сигнала .к помехе на выходе согласованного фильтра в соответствии с 1(8.17) будет равно:
![]()
По условию все значения k лежат в пределах ![]() роме того, степень перекрытия спектров полезного и любого мешающего сигналов, а следовательно, и мощность помехи является непрерывной случайной величиной. Таким образом, отношение
роме того, степень перекрытия спектров полезного и любого мешающего сигналов, а следовательно, и мощность помехи является непрерывной случайной величиной. Таким образом, отношение ![]() имеет случайный характер и находится в интервале
имеет случайный характер и находится в интервале
![]() (8.18)
(8.18)
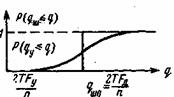
Рис. 8.11. Интегральные распределения отношения сигнала к помехе в системах с широкополосными и узкополосными сигналами
Интегральное распределение ![]() т. е. вероятность того, что
т. е. вероятность того, что ![]() не превышал некоторого значения q описывается непрерывной зависимостью
не превышал некоторого значения q описывается непрерывной зависимостью ![]() На рис. 8.11 показан примерный график этой функции для
На рис. 8.11 показан примерный график этой функции для ![]() (8.18).
(8.18).
Вычислим теперь отношение qш,, если при тех же условиях вместо полезного узкополосного сигнала передается широкополосный сигнал. Будем полагать, что его спектр равномерно занимает весь диапазон, т. е. F = FД. Согласно (8.17) в этом случае отношение qш представляет собой постоянную величину
![]()
а интегральное распределение ![]() изменяется скачком при.
изменяется скачком при.![]() График этого распределения для Рс=PП также приведен на рис. 8.11. Из сравнения распределений
График этого распределения для Рс=PП также приведен на рис. 8.11. Из сравнения распределений ![]() и qш следует, что существует определенная вероятность значений
и qш следует, что существует определенная вероятность значений ![]() , которые меньше qш0. Так как основная масса ошибок возникает при малых отношениях сигнала к помехе, то в условиях большой загрузки диапазона, когда вероятность
, которые меньше qш0. Так как основная масса ошибок возникает при малых отношениях сигнала к помехе, то в условиях большой загрузки диапазона, когда вероятность ![]() достаточна велика, передача информации узкополосным сигналом обладает в среднем более низкой помехоустойчивостью по сравнению с передачей широкополосным сигналом. Возникает вопрос: что же произойдет, если все станции будут передавать информацию широко полосными сигналами? Пусть в диапазоне частот FД размещаются n полностью перекрывающихся широкополосных сигналов, каждый из которых имеет ширину спектра F=FД и мощность Рс. Если при этих условиях передается еще один такой же сигнал, то отношение сигнала к помехе на выходе согласованного фильтра в соответствии с (8.16) будет равно:
достаточна велика, передача информации узкополосным сигналом обладает в среднем более низкой помехоустойчивостью по сравнению с передачей широкополосным сигналом. Возникает вопрос: что же произойдет, если все станции будут передавать информацию широко полосными сигналами? Пусть в диапазоне частот FД размещаются n полностью перекрывающихся широкополосных сигналов, каждый из которых имеет ширину спектра F=FД и мощность Рс. Если при этих условиях передается еще один такой же сигнал, то отношение сигнала к помехе на выходе согласованного фильтра в соответствии с (8.16) будет равно:
![]() (8.19)
(8.19)
где ![]() энергетический спектр сигналов.
энергетический спектр сигналов.
Следовательно, здесь интегральное распределение qш также имеет вид скачка, изображенного на рис. 8.11. Отсюда следует вывод, что взаимные помехи при использовании широкополосных сигналов в загруженных диапазонах менее опасны, чем при передаче узкополосных сигналов. Интересно отметить, что, несмотря на полное перекрытие спектров, соответствующим выбором длительности сигнала Т всегда можно добиться необходимого превышения его над помехой (8.19).
Широкополосные сигналы обладают сравнительно малой спектральной плотностью ![]() , которая в некоторых случаях может быть даже ниже плотности шумов. Эта особенность позволяет осуществлять скрытную передачу широкополосных сигналов, а также свести до минимума их мешающее воздействие на узкополосные сигналы.
, которая в некоторых случаях может быть даже ниже плотности шумов. Эта особенность позволяет осуществлять скрытную передачу широкополосных сигналов, а также свести до минимума их мешающее воздействие на узкополосные сигналы.
8.6. Системы с обратной связью
До сих пор рассматривались системы, в которых передача информации производилась в одном направлении: от передатчика к приемнику. Существуют системы, где между конечными пунктами возможен двусторонний обмен информацией, что, естественно, предполагает размещение в каждом из них передатчика и приемника. Обратный канал связи в таких системах может использоваться для передачи не только обычной информации, но также и специальных сообщений, предназначенных для повышения помехоустойчивости прямого канала. Системы связи, в которых по обратному каналу передаются сигналы, автоматически корректирующие ошибки в прямом канале, называются системами с обратной связью. Корректирование ошибок может осуществляться двумя способами. Первый из них характеризуется тем, что ошибки обнаруживаются на приемном конце. В случае обнаружения ошибок по обратному каналу передается сигнал запроса для повторения искаженного сообщения. Если на передающем конце сигнал запроса принят правильно, то текущая передача прерывается и автоматически повторяется ошибочно принятое сообщение. Такая система носит название системы с управляющей обратной связью или системы с автозапросом (переспросом).
При другом способе корректирования ошибок по обратному каналу на передатчик передаются сведения о каждом принятом от него сообщении и обнаружение ошибок, в отличие от системы с автозапросом, происходит на передающем конце. Если в результате анализа обнаруживается ошибка, то также происходит повторение и скаженного сообщения. Эта система называется системой с информационной обратной связью или системой со сравнением.
Остановимся сначала более подробно на системах с автозапросом. Одним из методов обнаружения искажений в принятом сообщении является применение корректирующих кодов, обнаруживающих ошибки (см. гл. 7). Определим вероятность ошибочных комбинаций в системе с автозапросом и обнаруживающим кодом. При приеме кодовой комбинации возможны три несовместимых события, суммарная вероятность которых равна единице:
![]()
Здесь ![]() —вероятность правильного приема,
—вероятность правильного приема, ![]() —вероятность необнаруживаемых данным кодом ошибок, Р00— вероятность обнаруживаемых ошибок. При отсутствии или необнаружении ошибок комбинация поступает на выход системы. Если имеются обнаруженные ошибки, то принятая комбинация стирается и посылается запрос для ее повторения. Поэтому при правильном приеме сигнала запроса вероятность повторения комбинации равна Р00. В результате вторичной передачи комбинации вновь возникает первоначальное положение с тремя возможными исходами и т. д. процесс передачи отдельной комбинации в такой системе можно представить графически при помощи векторной диаграммы.
—вероятность необнаруживаемых данным кодом ошибок, Р00— вероятность обнаруживаемых ошибок. При отсутствии или необнаружении ошибок комбинация поступает на выход системы. Если имеются обнаруженные ошибки, то принятая комбинация стирается и посылается запрос для ее повторения. Поэтому при правильном приеме сигнала запроса вероятность повторения комбинации равна Р00. В результате вторичной передачи комбинации вновь возникает первоначальное положение с тремя возможными исходами и т. д. процесс передачи отдельной комбинации в такой системе можно представить графически при помощи векторной диаграммы.
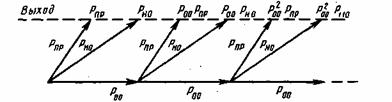
Рис. 8.12. Векторная диаграмма состояний системы с автозапросом
На рис.8.12 векторами показаны вероятные переходы системы из одного состояния в другое при приеме некоторой комбинации.
В дальнейшем будем полагать, что в системе отсутствует какое-либо ограничение количества повторных передач одной и той же комбинации, а переходы системы в различные состояния независимы. При этих условиях нетрудно определить вероятность ошибочного перехода, состоящего из l повторений комбинации с последующей подачей ее на выход при наличии необнаруженные ошибок. Как видно из рис.8.12, эта вероятность равна ![]() . Полную вероятность ошибки, очевидно, представляет суммарная вероятность всех ошибочных переходов
. Полную вероятность ошибки, очевидно, представляет суммарная вероятность всех ошибочных переходов
![]()
Вычисляя по известной формуле сумму геометрической прогрессии, получим
![]() (8.20)
(8.20)
При выводе этого выражения не учитывалась вероятность ошибки в сигнале запроса, что во многих случаях допустимо, так как в качестве таких сигналов выбираются специальные кодовые последовательности, обладающие высокой помехозащищенностью.
Если ![]() , то
, то ![]() и применение системы с автозапросом дает повышение помехоустойчивости, определяемой величиной p
и применение системы с автозапросом дает повышение помехоустойчивости, определяемой величиной p![]() , которая для различных типов кодов была приведена в предыдущей главе.
, которая для различных типов кодов была приведена в предыдущей главе.
В рассматриваемых системах передача сообщений происходит с некоторой избыточностью, обусловленной избыточностью самого кода [см. ф-лу (7.6)] и повторной передачей комбинаций, что эквивалентно увеличению ,их длительности. Определим величину этой избыточности. Обычно при обнаружении ошибки приемник переходит в режим ожидания запрашиваемой комбинации, длительность которого ![]() не меньше суммарной длительности прохождения сигналов в оба конца. Тогда при l повторениях время, затрачиваемое на прием одной комбинации, равно
не меньше суммарной длительности прохождения сигналов в оба конца. Тогда при l повторениях время, затрачиваемое на прием одной комбинации, равно![]() , где
, где ![]() — номинальная длительность комбинации. Вероятность того, что комбинация поступила на выход после l (повторении см. рис.8.12), определяется произведением
— номинальная длительность комбинации. Вероятность того, что комбинация поступила на выход после l (повторении см. рис.8.12), определяется произведением
![]()
Отсюда эквивалентная средняя длительность комбинации с учетом потерь на повторную передачу может быть представлена суммой
где ![]() - число дополнительно передаваемых комбинаций,
- число дополнительно передаваемых комбинаций,
Используя формулу суммы геометрической прогрессии, получим
 .
.
Таким образом, полная избыточность в системе с автозапросом при использовании n-значного обнаруживающего кода будет равна (7.6):
![]()
где k— значность первичного кода и п![]() — —эквивалентная значность обнаруживающего кода при наличии потерь за счёт повторных передач.
— —эквивалентная значность обнаруживающего кода при наличии потерь за счёт повторных передач.
Рассмотрим теперь характеристики систем с информационной обратной связью. B простейшем случае принятые приёмником сообщения полностью передаются по обратному каналу на передатчик, где происходит сравнение с переданными сообщениями. При наличии расхождений искаженные сообщения повторяются. Эту разновидность информационной обратной связи иногда называют ретрансляционной обратной связью. В подобной системе ошибка не будет обнаружена, если она произойдет в одном и том же символе дважды: при передаче по прямому и обратному каналам. Если вероятность ошибок и этих каналах соответственно равны Р0 и ![]() то можно показать, что вероятность необнаруженной в одном символе при Р0<<1 и
то можно показать, что вероятность необнаруженной в одном символе при Р0<<1 и ![]() <<1 приблизительно равна их произведению Р0
<<1 приблизительно равна их произведению Р0![]() . Так как
. Так как ![]() обычно величина достаточно малая, выигрыш в помехоустойчивости может быть значительным.
обычно величина достаточно малая, выигрыш в помехоустойчивости может быть значительным.
Достоинство ретрансляционной обратной связи сравнительная конструктивная простота. Однако для ретрансляции необходимо полностью занимать обратный канал.
В более сложных системах информационной обратной связи применяются коды, обнаруживающие ошибки. Отличие от систем с автозапросом состоит в том, что по прямому каналу передается только та часть кодовой комбинации, которая содержит информационные символы, а по обратному каналу передаются соответствующие им контрольные символы. На передающем конце производится сопоставление переданных информационных и принятых контрольных символов. Те комбинации, в которых нарушается соответствие между этими двумя группами символов, считаются ошибочными и они вновь повторяются. Подбирая коды с различной избыточностью и корректирующей способностью, здесь легче, чем в ретрансляционной системе, обеспечить наилучшие условия передачи сообщений. Анализ показывает, что применение кодов с избыточностью, равной 0,5, т. е. кодов, контрольные элементы которых также полностью занимают обратный канал, дает возможность получить более высокую помехоустойчивость, чем в ретрансляционной системе.
Если вероятности ошибок символов в прямом и обратном каналах одинаковы, полная вероятность ошибки кодовой комбинации при информационной обратной связи выражается той же формулой, что, и в системе с автозапросом (8.20). B отношении избыточности (с учетом прямой и обратной передач) эти системы также равноценны. Однако в том случае, когда вероятность ошибки в обратном канале значительно меньше, чем в прямом, системы с информационной обратной связью обладают более высокой помехоустойчивостью. В пределе при бесконечно большом отношении сигнала к помехе в обратном канале (Р'ош=0) и использовании кодов с достаточной избыточностью информационная связь может обеспечить безошибочную передачу в прямом канале. В этом легко удостовериться на примере ретрансляционной связи. Действительно, при Р'ош=0 все ошибки в прямом канале будут обнаружены, а следовательно, и исправлены. Близкие к этому условия имеют место на практике при осуществлении связи мощной наземной станции со станцией какого-либо подвижного объекта: самолета, ракеты и т. д. используя наземную станцию для передачи сигналов обратной связи, .можно обеспечить высокую помехоустойчивость и в канале подвижный объект—Земля, где мощность сигнала, как правило, невелика.
|В заключение необходимо отметить, что целесообразность применения систем с обратной связью зависит от уровня помех в прямом и обратном каналах. При очень сильных помехах возрастает количество повторений и пропускная способность системы резко падает. В этих условиях более рациональной может оказаться система без обратной связи.
8.7. Прерывистая связь
В каналах со случайными параметрами амплитуда сигнала изменяется в весьма широких пределах. Вследствие этого отношение сигнала к помехе в точке приема, в отдельные промежутки времени становится недопустимо малым, вероятность ошибки резко возрастает и связь практически нарушается. Длительность и «частота» этих промежутков времени зависит от статистических свойств сигнала, а также от характера и уровня помех.
Подобные условия имеют место, например, в системах связи, использующих тропосферное и ионосферное распространение радиоволн.
Чтобы обеспечить надежную связь в таких системах, приходится выбирать уровень сигнала с заведомо большим запасом, что приводит к нерациональному использованию мощности передатчика.
Еще в более тяжелых условиях работают метеорные системы связи, где распространение радиоволн происходит за счет отражения от кратковременно возникающих ионизированных метеорных следов. Значительную часть времени сигналы вовсе отсутствуют, я связь полностью нарушается.
Эффективным средством передачи информации по каналам с большими изменениями амплитуды сигнала является прерывистая связь. В системе прерывистой связи информация передается только в те интервалы времени, когда амплитуда сигнала достаточно велика для обеспечения надежного приема. Если амплитуда сигнала падает ниже некоторого порогового значения, система с помощью команд, передаваемых по обратному каналу, переводится в режим ожидания и передача информации прекращается до тех пор, пока амплитуда вновь не превысит порогового значения. В период ожидания поступающая от источника сообщений информация накапливается в специальных накопительных устройствах. В рабочие промежутки времени накопленная информация передается с высокой скоростью на приемный конец, где она также записывается в накопителе, а затем на более низкой скорости считывается и подается к получателю. Благодаря большой мгновенной скорости передачи информации прерывистые системы связи могут обеспечить высокую среднюю скорость, достаточную для непрерывной обработки поступающих от источников сообщений. Таким образом, отличительной особенностью прерывистых систем является высокая мгновенная скорость передачи и наличие обратного канала связи, который, как правило, используется не только для управления прерывистым режимом работы, но и для передачи полезной информации.
Определим помехоустойчивость и среднюю скорость передачи информации в прерывистых системах связи.
Пусть P![]() (q) — вероятность ошибки элемента сигнала при данном способе приема и q — отношение сигнала к помехе по мощности. Так как q — величина переменная, то помехоустойчивость характеризуется средним значением Р0, которое при медленном изменении амплитуды сигнала по сравнению со скоростью передачи вычисляется, как обычно, путем усреднения по всем возможным значениям q:
(q) — вероятность ошибки элемента сигнала при данном способе приема и q — отношение сигнала к помехе по мощности. Так как q — величина переменная, то помехоустойчивость характеризуется средним значением Р0, которое при медленном изменении амплитуды сигнала по сравнению со скоростью передачи вычисляется, как обычно, путем усреднения по всем возможным значениям q:
 (8.21)
(8.21)
Здесь ![]() — пороговое значение q, при превышении которого происходит передача информации, и
— пороговое значение q, при превышении которого происходит передача информации, и ![]() — плотность вероятности q при данном пороговом отношении
— плотность вероятности q при данном пороговом отношении ![]() . Зависимость
. Зависимость ![]() от
от ![]() объясняется тем, что любая плотность вероятности должна всегда удовлетворять известному условию
объясняется тем, что любая плотность вероятности должна всегда удовлетворять известному условию
 (8.22)
(8.22)
Функция ![]() связана с общим выражением для плотности вероятности p(q) отношением
связана с общим выражением для плотности вероятности p(q) отношением
 (8.23)
(8.23)
которое, как легко проверить, удовлетворяет условию (8.22). Поставляя (8.23) в (8,21), получим
 (8.24)
(8.24)
Коэффициент
 (8.25)
(8.25)
называемый иногда коэффициентом заполнения, равен относительному времени использования прерывистого канала для передачи информации. Он определяет среднюю скорость передачи информации, которая при заданной мгновенной скорости V, очевидно, равна произведению:
![]() (8.26)
(8.26)
Зависимость R(![]() ) при постоянной величине
) при постоянной величине![]() , как правило, носит сложный характер. Для некоторых распределений р(q) могут быть найдены оптимальные значения V и
, как правило, носит сложный характер. Для некоторых распределений р(q) могут быть найдены оптимальные значения V и ![]() , которые обеспечивают максимум R при заданной вероятности ошибки
, которые обеспечивают максимум R при заданной вероятности ошибки ![]() .Конечно, выбор того или иного режима передачи определяется реальными условиями работы. В частности, при наличии многолучевого распространения радиоволн выбор режима с высокой скоростью V ограничен минимально допустимой величиной длительности элементарного сигнала. Расчеты показывают, что в случае рэлеевского распределения амплитуд для некогерентных систем ЧМ переход от непрерывной системы связи к прерывистой дозволяет при одинаковой вероятности ошибки Р0=10-4 и равных мощностях передатчиков повысить скорость передачи примерно в 300 раз. При одинаковой скорости передачи и той же вероятности ошибки во столько же раз может быть уменьшена мощность передатчика.
.Конечно, выбор того или иного режима передачи определяется реальными условиями работы. В частности, при наличии многолучевого распространения радиоволн выбор режима с высокой скоростью V ограничен минимально допустимой величиной длительности элементарного сигнала. Расчеты показывают, что в случае рэлеевского распределения амплитуд для некогерентных систем ЧМ переход от непрерывной системы связи к прерывистой дозволяет при одинаковой вероятности ошибки Р0=10-4 и равных мощностях передатчиков повысить скорость передачи примерно в 300 раз. При одинаковой скорости передачи и той же вероятности ошибки во столько же раз может быть уменьшена мощность передатчика.
Прерывистый режим работы является режимом с переменной мгновенной скоростью передачи, принимающей всего лишь два значения: 0 и V. Очевидно, еще лучшие результаты могут быть получены в том случае, когда мгновенная скорость непрерывно изменяется в соответствии с изменениями уровня сигнала, увеличиваясь при сильных сигналах и уменьшаясь при слабых.
8.8. Борьба с сосредоточенными и по спектру, и по времени помехами
В реальных каналах связи, кроме флуктуационных помех, имеющих равномерный спектр и непрерывный характер, встречаются помехи, энергия которых сосредоточена в полосе частот или в интервале времени существенно меньших ширины спектра или длительности сигнала. Такие помехи называются соответственно сосредоточенными по спектру или во времени. Примером сосредоточенных по спектру помех являются синусоидальная помеха, сигналы мешающей станции или соседнего канала. К сосредоточенным по времени относятся импульсные помехи. Они представляют собой кратковременные по сравнению с длительностью сигнала импульсы. В полосе частот принимаемого сигнала спектр импульсных помех приблизительно равномерный.
Рассмотрим прием дискретных сигналов посредством согласованных фильтров при воздействии помех с неравномерным энергетическим спектром Gn(![]() ). Согласованным будем считать такой фильтр, который при приеме дискретного сигнала известной формы позволяет получить на выходе в некоторый момент времени t0 максимальное пиковое отношение сигнала к помехе по мощности. Подобная задача для помехи с равномерным спектром Gn(
). Согласованным будем считать такой фильтр, который при приеме дискретного сигнала известной формы позволяет получить на выходе в некоторый момент времени t0 максимальное пиковое отношение сигнала к помехе по мощности. Подобная задача для помехи с равномерным спектром Gn(![]() ) =
) =![]()
= —N0 решалась в § 4.6, где, был найдены комплексный коэффициент передачи согласованного фильтра (4.35) ![]() и максимальное пиковое отношение сигнала к помехе на выходе (4.34)
и максимальное пиковое отношение сигнала к помехе на выходе (4.34)
![]()
где G0=N0/2.
Для определения коэффициента передачи согласованного фильтра при неравномерном спектре помехи воспользуемся методом приведения помехи к белому шуму, который впервые был предложен В. А. Котельниковом. Этот метод состоит в том, что принятое колебание x(t)=s(t) + w'(-t) предварительно пропускается через линейный, четырехполюсник-выравниватель (рис. 8.13) с коэффициентом передачи ![]() Назначение выравнивателя состоит в том, чтобы неравномерный спектр помехи Gп(
Назначение выравнивателя состоит в том, чтобы неравномерный спектр помехи Gп(![]() ) преобразовать в равномерный:
) преобразовать в равномерный:
![]() (8.27)
(8.27)
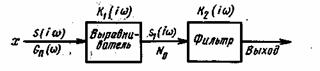
Рис. 8.13. Структурная схема согласованного фильтра при сосредоточенных по спектру помехах
Отсюда модуль коэффициента передачи выравнивателя должен быть равен:
![]() (8.28)
(8.28)
При этом сигнал также преобразуется и его комплексная спектральная плотность на выходе выравнивателя будет определяться выражением
![]() (8.29)
(8.29)
где ![]() спектральная плотность сигнала на входе.
спектральная плотность сигнала на входе.
Для такого сигнала оптимальным является обычный согласованный фильтр, рассчитанный на помеху с равномерным спектром. Поэтому дальнейшее построение сводится к использованию второго четырехполюсника, коэффициент передачи которого в соответствии с (4.35) и (8.29) равен:
![]() (8.30)
(8.30)
Таким образом, при неравномерном спектре помехи коэффициент передачи согласованного фильтра определяется произведением
![]()
Подставляя (8.30) и (8.28), получим
![]() (8.31)
(8.31)
Естественно, что при создании такого согласованного фильтра не обязательно выполнять его в виде двух последовательно соединенных четырехполюсников. Достаточно иметь один четырехполюсник с требуемым коэффициентом передачи (8 .31). Подобное разделение согласованного фильтра на две части является чисто математическим приемом, позволяющим на основе результатов, полученных для помехи типа белого шума, найти оптимальные характеристики фильтра в более сложном случае помех с неравномерным спектром.
Максимальное отношение сигнала к помехе на выходе согласованного фильтра можно определить по ф-ле (4.34), используя выражение для энергии сигнала на выходе выравнивателя
величину Go из (8.27). Подставляя в выражение для E![]() формулы (8.29) и (8.28), получим
формулы (8.29) и (8.28), получим
 (8.32)
(8.32)
Из выражения (8.31) следует, что коэффициент передачи согласованного фильтра при неравномерном спектре помехи зависит не только от спектра сигнала, но и от энергетического спектра помехи GП(![]() ), сведения о котором и должны быть использованы при построении фильтра. Если согласованный фильтр в силу отсутствия таких сведений рассчитан на помеху типа белого шума, то прием сигнала на фоне помехи с неравномерным спектром будет неоптимальным. Отношение сигнала к помехе на выходе фильтра в этом случае в соответствии с (4.32) и (4.35) будет равно:
), сведения о котором и должны быть использованы при построении фильтра. Если согласованный фильтр в силу отсутствия таких сведений рассчитан на помеху типа белого шума, то прием сигнала на фоне помехи с неравномерным спектром будет неоптимальным. Отношение сигнала к помехе на выходе фильтра в этом случае в соответствии с (4.32) и (4.35) будет равно:
 (8.33)
(8.33)
Используя (8.32), можно найти отношение ![]() , которое характеризует выигрыш, получаемый за счет использования предварительных сведений о спектре помехи.
, которое характеризует выигрыш, получаемый за счет использования предварительных сведений о спектре помехи.
Анализ показывает, что этот выигрыш возрастает с увеличением неравномерности спектра GП(![]() ) и в некоторых случаях может быть весьма значительным. Предельным является случай, когда в спектре сигнала имеется некоторый интервал частот, где помеха отсутствует
) и в некоторых случаях может быть весьма значительным. Предельным является случай, когда в спектре сигнала имеется некоторый интервал частот, где помеха отсутствует ![]() . Тогда в соответствии с (8.32)
. Тогда в соответствии с (8.32) ![]() , т. е. имеет место полное подавление помехи.
, т. е. имеет место полное подавление помехи.
Перейдем теперь к рассмотрению вопроса о борьбе с импульсными помехами. Для этой цели применяются наряду с фильтрами нелинейные устройства: ограничители и усилители с переменным коэффициентом усиления. При воздействии кратковременной импульсной помехи в резонансных системах приемника возникает ударное возбуждение с частотой настройки этих систем ![]()
![]() . Поэтому на выходе линейной части приемника напряжение импульсной помехи можно представить в виде
. Поэтому на выходе линейной части приемника напряжение импульсной помехи можно представить в виде
![]()
где UП(t) — огибающая помехи, форма и длительность которой зависят от параметров резонансных цепей приемника.
Система подавления такой помехи может состоять из последовательного соединения четырехполюсника с переменным во времени коэффициентом усиления K![]() (t) и фильтра. Коэффициент усиления четырехполюсника, называемого амплитудным выравнивателем, зависит от амплитуды помехи и изменяется таким образом, что ее амплитуда на интервале длительности полезного сигнала сохраняется постоянной:
(t) и фильтра. Коэффициент усиления четырехполюсника, называемого амплитудным выравнивателем, зависит от амплитуды помехи и изменяется таким образом, что ее амплитуда на интервале длительности полезного сигнала сохраняется постоянной:
![]() (8.34)
(8.34)
Тогда на вход фильтра поступают помеха постоянной амплитуды
![]()
и сигнал
![]()
где s(t) — сигнал на входе амплитудного выравнивателя. В этом случае необходимо применять фильтр, согласованный со спектром сигнала
![]()
при воздействии синусоидальной помехи, амплитуда которой постоянна на интервале длительности сигнала. Согласно (8.31) и (8.34) коэффициенты передачи .находятся в обратной зависимости от интенсивности помехи. Чем больше интенсивность помехи на данной частоте или в данный момент времени, тем меньше коэффициент передачи. Выполнение согласованного фильтра в строгом соответствии с изменением интенсивности помехи по спектру или во времени может привести к значительному усложнению аппаратуры. Поэтому в практически важном случае, когда интенсивность помехи в отдельном узком интервале частот или времени резко возрастает по сравнению с интенсивностью сигнала, достаточно эффективным способом борьбы с сосредоточенными помехами может быть способ стирания участков спектра или длительности сигнала, пораженных помехой. Такой способ используется в широкополосных системах связи для борьбы с сосредоточенными по спектру помехами в форме режекторных фильтров, вырезающих те участки спектра, которые содержат интенсивную помеху. Примером схемы, реализующей способ стирания для подавления импульсной помехи, является схема мгновенной автоматической регулировки усиления (МАРУ), резко уменьшающая усиление приемника при воздействии кратковременных помех.
Из рассмотрения способов приема дискретных сигналов при воздействии сосредоточенных по спектру или во времени помех вытекает, что системы приема, оптимальные для флуктуационных помех, не являются оптимальными для сосредоточенных помех. Оптимизация систем приема в последнем случае производится на основе использования дополнительных сведений об энергетическом спектре либо о форме помех. Эти сведения могут быть получены с той или иной степенью точности посредством специальных устройств. Так как сосредоточенные помехи обычно имеют случайный характер, то измерение их параметров должно вестись непрерывно в процессе приема полезного сигнала. Приемник все время должен следить за изменением помех в канале и в соответствии с их параметрами подстраивать систему оптимального приема сигналов. Приемник, который автоматически приспосабливается к изменяющимся условиям приема, называется адаптивным. Необходимо подчеркнуть, что подавление сосредоточенных по спектру и импульсных помех, в принципе, может быть более эффективным в сравнении с подавлением флуктуационных помех. Чем больше отличается помеха от флуктуационной и чем лучше адаптируется приемник, тем выше эффективность борьбы с такой помехой.
Вопросы для повторения
1. Какие способы неоптимального приема ЧМ сигналов применяются на практике?
2. Дайте сравнительную оценку помехоустойчивости известных методов приема ЧМ сигналов и объясните, чем отличаются неоптимальные методы приема от оптимальных?
3. Почему система ФМ с интегратором по нч является системой оптимального когерентного приема двоичных сигналов?
4. В чем основная причина того, что система ФМ не нашла достаточно широкого применения на практике?
5. Какие существуют три основных метода приема сигналов ОФМ и в чем заключаются их преимущества по сравнению с системой ФМ?
6. Приведите сравнительную оценку помехоустойчивости систем ФМ и ОФМ.
7. Какой системе соответствуют наиболее высокие значения коэффициентов ![]() и
и ![]() ?
?
8. Почему в многолучевых каналах широкополосные сигналы могут обеспечить более высокую скорость работы, чем узкополосные сигналы?
9. Чем объясняется высокая помехоустойчивость широкополосных сигналов при воздействии сосредоточенных по спектру помех?
10. Каким образом можно пояснить преимущества широкополосных сигналов в условиях большой загрузки диапазона?
11. Какие методы повышения помехоустойчивости используются при применении систем с обратной связью?
12. В каких каналах применяется прерывистая связь и в чем состоят ее отличительные особенности?
13. От каких параметров и характеристик зависит средняя скорость передачи информации в прерывистых системах связи?
14. Что представляет собой согласованный фильтр при приеме сигналов в присутствии сосредоточенных по спектру помех?
15. Какие приемники называются адаптивными?