3.1. Измерительные устройства ГСП. Сигналы и параметры
3.2. Основные параметры датчиков
3.2.1. Статическая характеристика датчика
3.1. Измерительные устройства ГСП. Сигналы и параметры
ИУ и системы составляют самую многочисленную группу изделий ГСП, составляющую более половины номенклатуры промышленных изделий ГСП. Они обеспечивают получение измерительной информации о физических величинах (параметрах), характеризующих технологические процессы, свойства и качество продукции.
Классификация ИУ ГСП, учитывающая вид входных и выходных сигналов, приведена на рисунке. Под «естественным» входным сигналом в приведенной классификации понимают выходную физическую величину первичного ИП, полученную однократным простым («естественным») преобразованием измеряемой величины и не соответствующую по параметрам унифицированным сигналам. При этом под простым преобразованием понимают только преобразование, используемым для измерения физическим явлением. Несмотря на большое разнообразие величин, виды естественных выходных сигналов ГСП удается ограничить десятью, приведенными на рисунке 8.
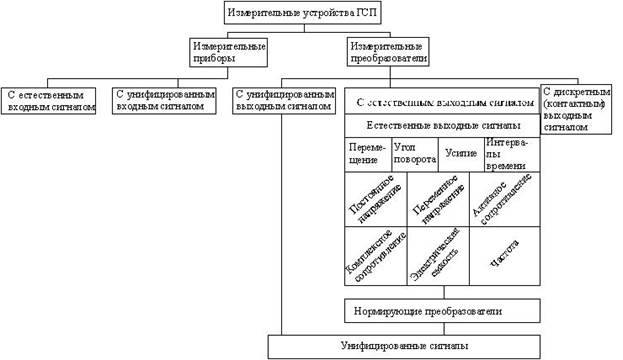
Рис. 8. Классификация СИ ГСП по входным и выходным сигналам
Все измеряемые и управляемые величины ГСП делят на 5 групп: теплоэнергетические, электроэнергетические, механические, физические свойства и химический состав. Каждый измеряемый параметр (их больше 30) имеет свое обозначение: I –сила тока, T – температура, K – число оборотов, Q – расход и т.д.
К устройствам получения информации относят: датчики, измерительные и нормирующие преобразователи и кодеры. В составе ее мы рассматривает и АЦП/ЦАП, так как они часто вместе с указанными элементами составляют единый прибор.
Датчики: подразделяются также на аналоговые, бинарные дискретные и цифровые датчики, выдающие последовательность импульсов или двоичное слово в некотором коде.
Носителем информации может быть один из параметров сигнала: амплитуда, частота, фаза, временные, пространственные соотношения.
Цифровые бинарные датчики имеют два состояния, каждому из которых соответствует свой уровень сигнала, который должен быть преобразован к стандартным значениям «лог. 0» или «лог. 1» для передачи и дальнейшей обработки.
Кодовые датчики (единица измерения - Байт) – выдают цифровой сигнал в одной из систем кодирования: код 2/10 (BCD), код 1248, код Грея, код ASCII, код EBCD1C.
Для преобразования естественного выходного сигнала в унифицированный сигнал в ГСП используются нормирующие преобразователи. Значение нормирования параметров входных и выходных сигналов в ГСП удобно пояснить на примере. Очень широкое распространение получил унифицированный сигнал постоянного тока с диапазоном значений от 0 до 5мА. Если в данном агрегатном комплексе технических средств принят такой сигнал, то это означает, что независимо от вида измеряемого параметра Х и диапазона его значений (Xmin,..., Xmax) ему соответствует на выходе нормализующего преобразователя диапазон сигналов постоянного тока от 0 до 5мА. При этом сигнал не должен изменяться с изменением сопротивления нагрузки на выходе нормализующего преобразователя в диапазоне от 0 до 2,5кОм.
Установив на выходе преобразователя резистор, например с сопротивлением 1кОм, можно привести сигнал к общему диапазону от 0 до 5В и именно на этот диапазон спроектировать АЦП. Нормализующие преобразователи с выходным сигналом в виде унифицированного тока можно размещать довольно далеко от АЦП – на расстоянии до нескольких километров. В этом случае значение сопротивления подводящих проводов не скажется на точности измерения. Лишь при больших расстояниях (свыше 10км) начинают влиять токи утечки между проводами линии. Рис.9.
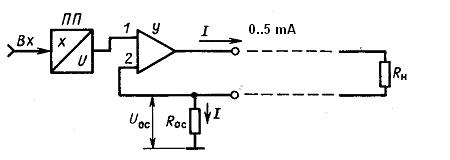
Рис. 9. Датчик с унифицированным выходным сигналам 0.5 mA
3.2. Основные параметры датчиков
Датчик – конструктивно законченный элемент, состоящий из чувствительного элемента и измерительных преобразователей (ИП). С введением унифицированных сигналов в практику приборостроения вошло производство датчиков с унифицированным выходным сигналом. В данном случае датчиком называют объединенные в одном блоке первичный измерительный преобразователь и нормализующий преобразователь. ИП служат для преобразования естественного сигнала чувствительного элемента (первичный преобразователь) в форму, удобную для передачи или обработки. Современные датчики содержат узлы, выполняющие линеаризацию, корректировку и другую обработку сигнала. Пример структурной схемы датчика приведен на рис.10.
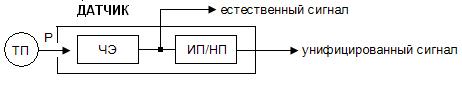
Рис.10. Структурная схема датчика
Основные характеристики датчика: входной параметр, выходной сигнал, статическая характеристика, динамическая характеристика и погрешности, конструктивные характеристики.
3.2.1. Статическая характеристика датчика
Статическая характеристика датчика (вход-выход) отражает функциональную зависимость выходного сигнала от входного параметра в установившемся режиме. Статическая характеристика задается: аналитически, графически, таблично. Рис. 11.
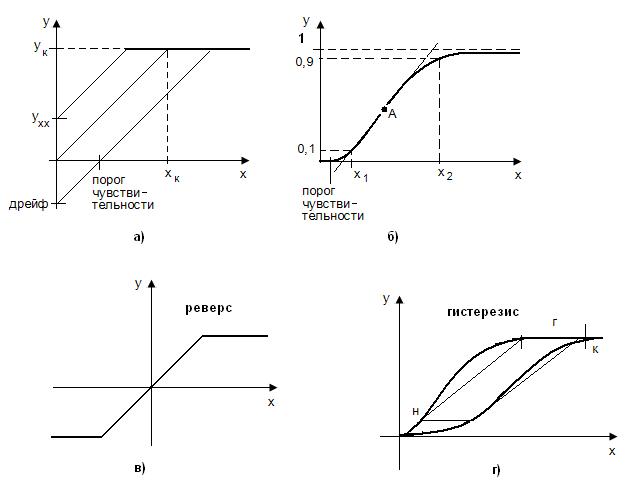
Рис.11. Статические характеристики датчиков:
а) линейные нереверсивные, б) реальные нелинейные, в) реверсивная, г) гистерезисная.
По этой характеристике определяются такие параметры датчика, как чувствительность (коэффициент преобразования), порог чувствительности/разрешения, линейность, величина дрейфа; рабочий/,динамический диапазон, параметры гистерезиса и т. д. Для некоторых типов датчиков (термопары ГСП) установлены номинальные статические характеристики (НСХ) и установлены классы точности в соответствии с процентом отклонений от НСХ.
1) Коэффициент преобразования или коэффициент передачи - это отношение выходной величины элемента Yк к входной величине Xк или отношение приращения выходной величины (![]() =Y2-Y1, dy) к приращению входной величины (
=Y2-Y1, dy) к приращению входной величины (![]() =X2-X1, dx):
=X2-X1, dx):
Cтатический коэффициент преобразования (k, k’).
![]() ,
, ![]() .
.
Значение динамического коэффициента преобразования Кд зависит от выбора рабочей точки.(Рис. 10 б) точка А).
![]()
2) Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает изменение выходной величины. При изменении входной величины X от 0 до порога выходная величина Y не изменяется и равна 0. Рис. 10 а), б).
3) Линейность. Статические характеристики датчика на рабочем участке (в окрестностях точки А) должны быть линейными, отклонение измеряется в %.
4) Дрейф это смещение характеристики при изменении внешних условий по отношению к стандартным. Рис. 10 а).
5) Диапазон измерений – область значений измеряемого сигнала, для которого нормированы измеряемые погрешности. Эта область ограничена пределами измерений наибольшими и наименьшими значениями диапазона измерений. D=Xкз .. Xп, где Xкз - конечное значение шкалы приборов, Xп- порог чувствительности приборов. Диапазон измерений может состоять из нескольких поддиапазонов. Динамический диапазон используют, если диапазон очень велик.
Dd=20*Log(X2/X1)
6) Характеристики многих датчиков имеют гистерезис: сигнал датчика при прямом и обратном ходе отличаются, основной показатель гистерезиса ширина петли. Рис. 10 г).
7) Реле называется элемент автоматики, в котором при достижении входной величины X определенного значения, выходная величина изменяется скачком. Зависимость Y= f(X) является вариантом гистерезиса и имеет форму петли. Рис.11.
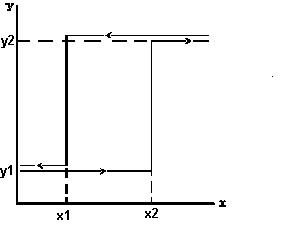
Рис. 12. Характеристика реле
Скачкообразное изменение Y в момент X=X2 называется величиной срабатывания. Скачкообразное изменение Y в момент X=X1 называется величиной отпускания. Отношение величины отпускания X21к величине срабатывания X2 называется коэффициентом возврата ОбычноX2 > X1, поэтому Кв.= Х1/Х2 < 1.
3.2.2. Динамическая характеристика датчика
Динамическая характеристика датчика определяет поведение датчика в переходных режимах. Динамические характеристики определяют зависимость выходного сигнала датчика от меняющихся во времени величин: параметров входного сигнала, внешних факторов, нагрузки. В зависимости от полноты описания динамических свойств СИ различают полные и частные динамические характеристики. К полным динамическим характеристикам относят переходную характеристику, импульсную переходную характеристику, амплитудно-фазовую характеристику, совокупность амплитудно-частотной и фазово-частотной характеристик, передаточную функцию. Частная динамическая характеристика не отражает полностью динамических свойств датчика. Примерами таких характеристик являются время реакции датчика, коэффициент демпфирования, значение резонансной собственной угловой частоты, значение амплитудно-частотной характеристики на резонансной частоте, запаздывание, время нарастания, время установления, время первого максимума, статическая ошибка, полоса пропускания, постоянная времени.
Для датчиков и измерительных преобразователей время реакции – время установления выходного сигнала, определяемое при скачкообразном изменении входного сигнала и заданной погрешности установления выходного сигнала. Динамические свойства СИ определяют динамическую погрешность.
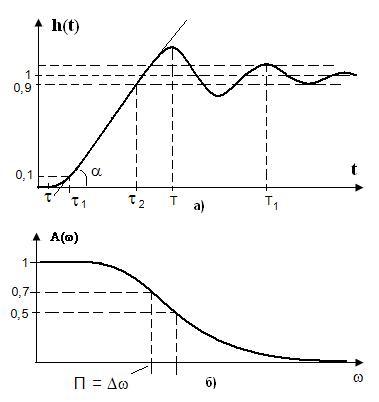
Рис. 13. Динамические характеристики датчика
На рисунке обозначены характеристики:
запаздывание - t;
время нарастания - t2 - t1;
время первого максимума – Т;
время переходного процесса - Т1;
полоса пропускания – П.
3.2.3. Погрешности
При работе датчика выходная величина у отклоняется от необходимого значения за счет внутренних или внешних факторов (износ, старение, колебания напряжения питания, температура и т.д.). Отклонение характеристики называется погрешностью. Погрешности: делятся на основные и дополнительные.
Основная погрешность – максимальная разность между выходным сигналом датчика и его номинальным значением при нормальных условиях эксплуатации.
Дополнительные погрешности – вызываются изменением внешних условий по отношению к норме, нормированные по основному фактору. Выражаются в процентах к изменению вызвавшего фактора. Например: 1% на 5°С.
Основная погрешность может быть абсолютной, относительной и приведенной.
а) Абсолютной погрешностью (ошибкой) называется разность между действительным значением выходной величины ![]() и его номинальным значением– Y:
и его номинальным значением– Y:
![]() .
.
б) Относительной погрешностью называется отношение абсолютной погрешности ![]() к номинальному (желаемому) значению выходной величины Y (обычно выражается в %):
к номинальному (желаемому) значению выходной величины Y (обычно выражается в %):
![]() .
.
в) Приведенной погрешностью называется отношение абсолютной погрешности к нормирующему значению: для преобразователей это наибольшее значение выходной величины, для приборов максимальное значение шкалы. Величина этой погрешности определяет класс точности прибора 0,1; 0,5; 1.0 и т.д.
 .
.
Погрешности СИ могут иметь систематические и случайные составляющие. Случайные составляющие приводят к неоднозначности состояний. Поэтому случайные составляющие погрешности СИ стараются сделать незначительными по сравнению с другими составляющими.
Систематические погрешности измерения - это составляющие погрешности, которые остаются постоянными и закономерно изменяются при повторных измерениях одной и той же величины. К постоянным систематическим погрешностям относят погрешность градуировки шкалы, температурная погрешность и т.д. К переменным систематическим погрешностям относят погрешность, обусловленную нестабильностью источника питания. Систематические погрешности исключают путем калибровки или введения поправок (смещения).
Случайные погрешности измерений – это составляющие погрешности измерения, изменяющиеся случайным образом при повторных измерениях одной и той же величины. Значение и знак случайной погрешности определить невозможно, т. к. случайные погрешности обязаны своим происхождением причинам, действия которых не одинаково в каждом эксперименте и не может быть учтено.
Обнаруживаются случайные погрешности при многократных измерениях одной и той же величины, следовательно, их влияние на результат измерений учитывается методами математической статистики и теории вероятности. Рис. 14.
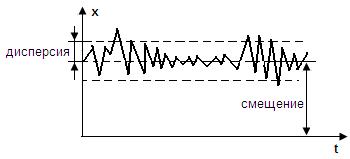
Рис. 14. Систематическая и случайная составляющие погрешности
3.3. Структурные схемы ИП и их погрешности
В ГСП, несмотря на значительное разнообразие измеряемых величин и используемых для этого принципов измерений, применяются четыре структурные схемы измерительных устройств, а именно: схема прямого однократного преобразования, схема последовательного прямого преобразования, схема прямого дифференциального преобразования, схема управляющего преобразования (часто называется компенсационной).
Структура однократного прямого преобразования реализуется в ИП с естественными выходными сигналами, например в термоэлектрических преобразователях, датчиках давления и перепада давления. Если первичное преобразование измеряемой величины не дает удобного для использования сигнала, применяют структуры с несколькими последовательными ИП.
Дифференциальная структура в ИП применяется тогда, когда измерение основывается на сопоставлении результатов преобразования измерительной информации, полученной в реальных и в некоторых эталонных условиях. Преимущество этой структуры по сравнению с предыдущими состоит в значительном уменьшении погрешности, обусловленной изменением параметров источника питания и окружающей среды.
Наиболее совершенной является структура с отрицательной обратной связью, получившая название компенсационной схемы. Достоинство схемы - компенсация изменений параметров измерительного тракта вследствие того, что выходной сигнал непрерывно сравнивается с измеряемой величиной. Отрицательная обратная связь существенно снижает влияние погрешности звеньев прямого канала на результат преобразования.
Измерительные устройства в этих структурах состоят из некоторого числа элементов, организованных в измерительную цепь.
Преобразовательный элемент – элемент системы измерений (СИ), в котором происходит одно из ряда последовательных преобразований величины;
Чувствительный элемент – первый элемент в измерительной цепи. Преобразовательный элемент, находящийся под непосредственны воздействием измеряемой величины;
Измерительный механизм – часть конструкции СИ, состоящий из элементов, взаимодействие которых вызывает из взаимное перемещение
Отсчетное устройство – часть конструкции СИ, предназначенное для регистрации показаний.
Регистрирующее устройство – часть регистрирующего измерительного прибора, предназначенная для регистрации показаний.
На рисунке ниже приведены схемы измерительных устройств прямого действия (прямого преобразования) и уравновешивающего или компенсационного преобразования.
 а)
а)

Рис. 15. Структурные схемы СИ прямого действия
Работа СИ прямого действия. На рисунке 15а измеряемая физическая величина Х поступает в чувствительный элемент 1, где преобразуется в другую величину, удобную для дальнейшего использования (ток, напряжение, давление, перемещение, сила), и поступает на промежуточный преобразовательный элемент 2, который обычно либо усиливает поступающий сигнал, либо преобразует его по форме. (Элемент 2 может отсутствовать). Выходной сигнал элемента 2 поступает к измерительному механизму 3, перемещение элементов которого определяется с помощью отсчетного устройства 4. Выходной сигнал Y (показание), формируемый измерительным прибором, может быть воспринят органами чувств человека.
На рисунке 15б приведена структурная схемы измерительного преобразователя, у которого отсутствует измерительный механизм и отсчетное устройство. Этим определяется тот факт, что сигнал измерительных преобразователей имеет форму, недоступную для восприятия человеком. В то же время в составе таких измерительных преобразователей, как правило, имеется оконченный преобразовательный элемент 7, который формирует выходной сигнал (усиливает его по мощности, преобразует в частоту колебаний и т.д.) таким образом, что его можно передавать на расстояние, хранить и обрабатывать.
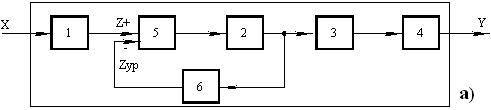
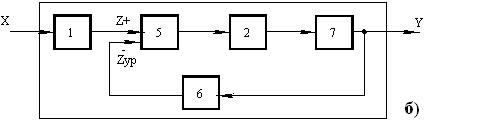
Рис. 16. Структурные схемы СИ сравнения
Схема измерительного прибора, основанного на методе уравновешивающего преобразования, показана на рисунке 16а. Отличительной особенностью таких приборов является наличие отрицательной обратной связи. Здесь сигнал Z, возникающий на выходе чувствительного элемента, поступает на преобразовательный элемент 5, который способен осуществлять сравнение двух величин (элемент сравнения, компаратор), поступающих на его вход. Кроме величины Z на выход элемента 5 подается величина с противоположным знаком Zур (уравновешивающий сигнал), которая формируется на выходе обратного преобразовательного элемента 6. На выходе элемента 5 формируется сигнал, пропорциональный разности значения величин Z и Zур. Этот сигнал поступает в промежуточный преобразовательный элемент 2, выходной сигнал которого поступает одновременно на измерительный механизм 3 и на вход обратного преобразовательного элемента 6. В зависимости от типа промежуточного преобразовательного элемента 2 при каждом значении измеряемого параметра и соответствующем ему значении Z разность Z-Zур, поступающая на вход элемента 5, может сводиться к нулю или иметь некоторое малое значение, пропорциональное измеряемой величине.
На рисунке 16б приведена структурная схема уравновешивающего измерительного преобразователя
Погрешности ИП
Прямое преобразование.
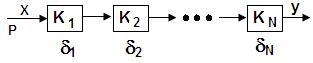
Рис. 17. Схема прямого преобразования
На рисунке обозначены: Р – измеряемая величина; Х – ее значение; Y – выходной сигнал преобразователя; Кi – коэффициенты усиления элементов; dI – погрешности элементов.
![]()
![]() ;
; ![]()
Дифференциальная схема.
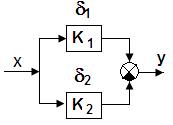
Рис. 18. Дифференциальная схема
![]() ;
; ![]()
Достоинства этой структуры:
- уменьшение Dсист;
- увеличение чувствительности и снижение нелинейности
- получение реверсивной характеристики.
3. Компенсационная схема.
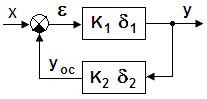
Рис. 19. Компенсационная схема
 ;
; ![]() при
при ![]() ;
; ![]() .
.
Достоинства этой структуры:
- увеличение чувствительности и точности;
- стабильность коэффициента преобразования;
- компенсация погрешностей,
- высокое входное сопротивление, что приводит к уменьшению нагрузки на датчик.