6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() - коэффициент, зависящий от доверительной вероятности результата измерений:
- коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() - обратная функция интеграла вероятности
- обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
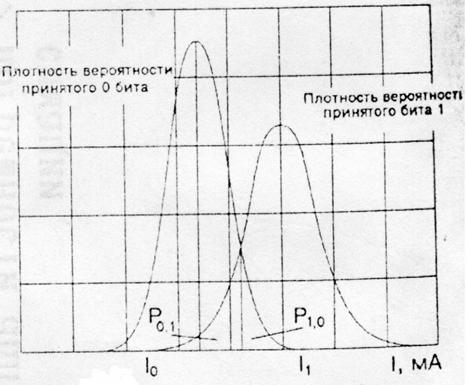
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() - дисперсия оцениваемого параметра.
- дисперсия оцениваемого параметра.
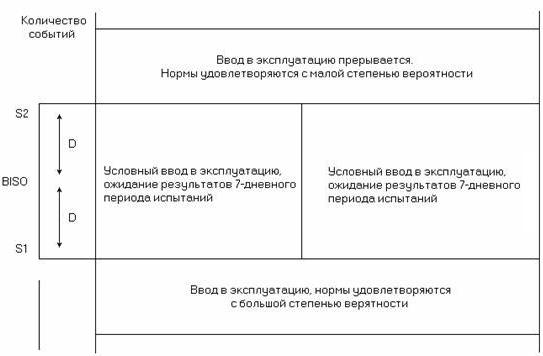
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
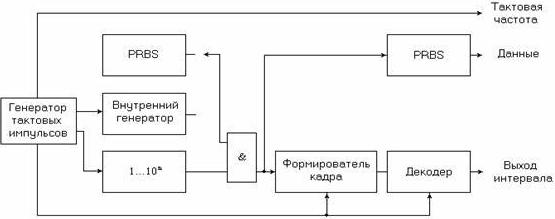
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
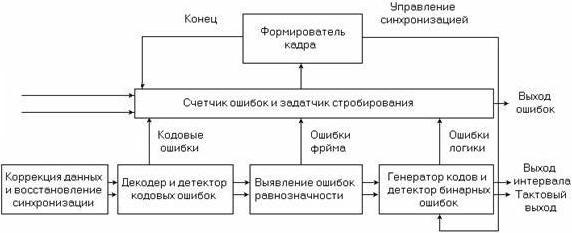
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
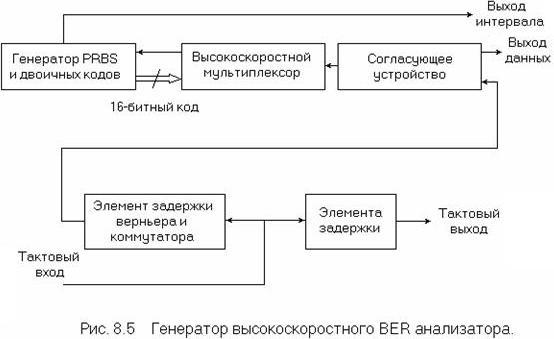
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
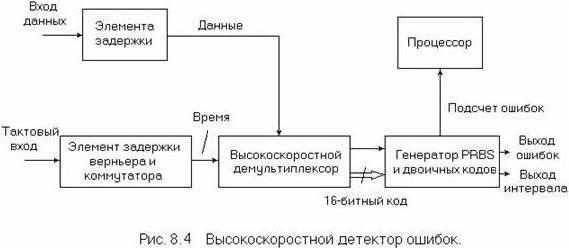
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() - погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a - коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
- погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a - коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.