1.1. Формирование цифрового канального сигнала
1.1.1. Операция дискретизации, выбор частоты дискретизации
2. Групповой сигнал, его параметры
2.2. Структурная схема оконечной станции
3. Системы синхронизации в ЦСП
4. Линейный тракт, линейные коды
6. Объединение цифровых потоков
6.1. Стандартизация цифровых систем передачи
6.2. Временное объединение цифровых потоков
6.3. Оборудование временного группообразования асинхронных цифровых потоков
6.4. Оборудование асинхронного объединения цифровых потоков. Запоминающее устройство
Введение
Развитие науки и ускорение технического прогресса невозможны без совершенствования средств связи, систем сбора, передачи и обработки информации. Интенсивное развитие новых информационных технологий в последние годы привело к бурному развитию микропроцессорной техники, которая стимулировала развитие цифровых методов передачи информации. В конечном счёте, это привело к созданию новых высокоскоростных технологий глобальных сетей: PDH, SONET, SDH, ISDN, Frame Relay и ATM. Одной из наиболее современных технологией, используемых в настоящее время для построения сетей связи, является технология синхронной цифровой иерархии SDH.
Интерес к SDH обусловлен тем, что эта технология пришла на смену импульсно-кодовой модуляции PCM (ИКМ) и плезиохронной цифровой иерархии PDH (ПЦИ) и стала интенсивно внедряться в результате массовой установки современных зарубежных цифровых АТС, позволяющих оперировать потоками 2 Мбит/с, и создания в регионах локальных колец SDH.
Синхронная цифровая иерархия (СЦИ) обладает существенными преимуществами по сравнению с системами предшествующих поколений, позволяет полностью реализовать возможности волоконно-оптических и радиорелейных линий передачи (ВОЛП и РРЛП) и создавать гибкие, удобные для эксплуатации и управления сети, гарантируя высокое качество связи. Таким образом, концепция SDH позволяет оптимально сочетать процессы высококачественной передачи цифровой информации с процессами автоматизированного управления, контроля и обслуживания сети в рамках единой системы.
Системы СЦИ обеспечивают скорости передачи от 155 Мбит/с и выше и могут транспортировать как сигналы существующих цифровых систем (например, распространённых на городских сетях ИКМ-30), так и новых перспективных служб, в том числе широкополосных. Аппаратура СЦИ является программно управляемой и интегрирует в себе средства преобразования, передачи, оперативного переключения, контроля, управления.
Благодаря появлению современных волоконно-оптических кабелей (ВОК) оказались возможными высокие скорости передачи в линейных трактах (ЛТ) цифровых систем передачи с одновременным удлинением секций регенерации до 100 км и более. Производительность таких ЛТ превышает производительность цифровых трактов на кабелях с металлическими парами в 100 и более раз, что радикально увеличивает их экономическую эффективность. Большинство регенераторов оказывается возможным совместить с оконечными или транзитными станциями. Из этого следует, что СЦИ - это не просто новые системы передачи, это и принципиальные изменения в сетевой архитектуре, организации управления. Внедрение СЦИ представляет собой качественно новый этап развития цифровой сети связи.
1. Основные положения о ЦСП
1.1. Формирование цифрового канального сигнала
1.1.1. Операция дискретизации, выбор частоты дискретизации
В зависимости от способа обработки и передачи сообщений системы передачи разделяются на аналоговые и цифровые. К аналоговым относятся системы передачи:
- с частотным разделением каналов (ЧРК), в которых для передачи сигналов по каждому каналу передачи в диапазоне частот линейного тракта отводится определенная полоса частот;
- с временным разделением каналов (ВРК), в которых для передачи сигналов по каждому каналу передачи в линейном тракте отводятся определенные интервалы времени.
К цифровым относятся системы передачи, в которых все виды сообщений передаются посредством цифровых сигналов.
Источники сообщений и соответствующие этим сообщениям сигналы подразделяются на непрерывные и дискретные. К непрерывным относятся такие сигналы, которые могут принимать в некоторых пределах любые значения и являются непрерывными функциями времени (сигналы телефонии, радиовещания и т. д.).
К дискретным относятся сигналы, которые состоят из отдельных (дискретных) элементов, имеющих конечное число различных значений (телеграфные сообщения, разовые команды и т. д.).
В аналоговых системах с ЧРК как непрерывные, так и дискретные сигналы с помощью различных видов модуляции AM, AM-ОБП, ЧМ преобразуются в групповой линейный сигнал, который является непрерывной функцией времени. Аналоговые дискретные сигналы можно получить из непрерывных, используя дискретизацию по времени, амплитуде, времени и амплитуде одновременно.
Рисунок 1.1. Сигнал, дискретный по времени.
При дискретизации непрерывного сигнала по времени (рисунок 1.1) передается не весь сигнал, а его амплитудные значения, взятые через промежутки времени, называемые периодом дискретизации Тд. При определенном выборе периода дискретизации непрерывный сигнал, передаваемый дискретными по времени отсчетами, может быть восстановлен в дальнейшем практически без искажений. Полученный сигнал дискретен по времени, но непрерывен по амплитуде, так как в пределах динамического диапазона непрерывного сигнала его временные отсчеты по амплитуде могут быть сколь угодно близки друг к другу.
Рисунок 1.2. Сигнал, дискретный но амплитуде.
При дискретизации непрерывного сигнала по амплитуде (рисунок 1.2) передаются только определенные заранее выбранные его амплитудные значения, отличающиеся друг от друга па постоянную величину, которую называют шагом квантования по уровню. Как видно, квантованный по амплитуде сигнал отличается от исходного непрерывного сигнала тем, что приводит к ошибке квантования, определяемой разностью между первоначальным и квантованным по уровню сигналами.
Рисунок 1.3. Сигнал, дискретный по времени и амплитуде.
Сигнал, дискретный по времени и амплитуде (рисунок 1.3), можно получить, осуществив квантование по уровню сигнала, дискретного по времени. Амплитудные отсчеты полученного сигнала отличаются от истинных значений дискретных отсчетов, что, как и в предыдущем случае, приводит к ошибке квантования по уровню (рисунок 1.4).
Рисунок 1.4. Метод получения цифрового сигнала.
При цифровом представлении сигнала, дискретного по времени и каждому из уровней квантования по амплитуде присваивается свой номер, а его величина из десятичной системы счисления преобразуется в двоичную. Поэтому в дальнейшем можно передавать не сами отсчеты сигнала с их амплитудой, а группу импульсов, соответствующих номеру уровня квантования, выраженного в двоичной системе счисления, т. е. цифровой сигнал, который состоит из последовательности импульсов, причем наличие импульса свидетельствует о передаче единицы, а его отсутствие о передаче нуля. Цифровые сигналы по сравнению с аналоговыми обладают высокой помехоустойчивостью, так как при их обнаружении на фоне шумов необходимо определить лишь наличие импульса или его отсутствие.
Таким образом, с точки зрения преобразования сигналов структурная схема цифровой системы передачи может быть представлена в виде (рисунок 1.5).

Рисунок 1.5. Структурная схема цифровой системы передачи.
Непрерывный аналоговый сигнал от источника информации (ИИ) поступает на дискретизатор (Д), в котором преобразуется в дискретные по времени отсчеты. В квантующем устройстве (КУ) осуществляется квантование временных отсчетов сигнала по амплитуде. Аналого-цифровой преобразователь (АЦП) осуществляет преобразование дискретного по времени и амплитуде аналогового сигнала в цифровой.
На приеме в цифро-аналоговом преобразователе (ЦАП) происходит обратное преобразование цифрового сигнала в дискретный по времени и амплитуде аналоговый сигнал, а устройство восстановления (УВ) восстанавливает непрерывный сигнал, поступающий в приемник информации (ПИ).
Преобразование непрерывных сигналов в цифровую форму и цифровых сигналов в непрерывные сопровождается искажениями передаваемых сообщений, возникающими при дискретизации непрерывных сигналов ошибок квантования в КУ и искажении УВ непрерывных сигналов.
1.1.2. Теорема Котельникова
Возможность передачи непрерывного сигнала его дискретными отсчетами была обоснована В. А. Котельниковым в 1933 г. В соответствии с его теоремой любой непрерывный сигнал, ограниченный по спектру верхней частотой Fв, полностью определяется последовательностью своих дискретных отсчетов, взятых через промежуток времени Тд≤1/2Fв.
Таким образом, если требуется передать непрерывный сигнал U(t) с ограниченным спектром, то не обязательно передавать весь сигнал, а достаточно передать лишь его мгновенные значения, отсчитанные через интервалы времени Тд (рисунок 1.1). В соответствии с этим частота следования дискретных отсчетов сигнала, т. е. частота дискретизации
2Fв≤ Fд. (1.1)
Для восстановления непрерывного сигнала из последовательности его дискретных отсчетов в пункте приема используется фильтр нижних частот (ФНЧ) с частотой среза, равной Fв.
Как известно, отклик идеального ФНЧ с граничной частотой среза Fв на очень короткий прямоугольный импульс, поданный на его вход, имеет вид, изображенный на рисунке 1.6.
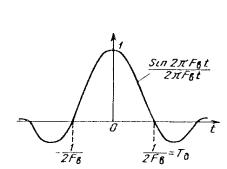
Рисунок 1.6. Отклик ФНЧ на короткий прямоугольный импульс.
Если на вход такого фильтра поступает последовательность коротких импульсов, соответствующих дискретным отсчетам непрерывного сигнала (рисунок 1.7), то на выходе фильтра в результате суммирования отдельных откликов переданный непрерывный сигнал вновь восстанавливается.
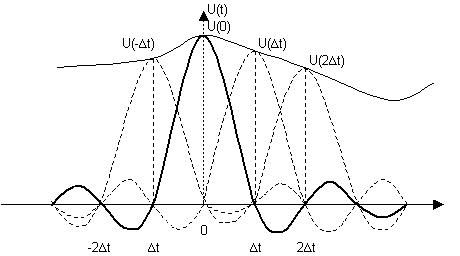
Рисунок 1.7. Формирование непрерывного сигнала фильтром нижних частот.
1.1.3. Выбор частоты дискретизации
На основании теоремы Котельникова Fд >=2Fв. Если выбрать Fд = 2Fв, то, как видно из рисунка 1.8, нижняя боковая частота, определяемая из условия:
Fд –Fв=2Fв-Fв=Fв (1.2)
Рисунок 1.8. Выбор частоты дискретизации.
совпадает с верхней частотой спектра модулирующего сигнала и для восстановления непрерывного сигнала из последовательности его дискретных отсчетов необходимо использовать идеальный ФНЧ с частотой среза Fc=Fв. В реальных системах частоту дискретизации выбирают из условия Fд>2Fв. Обычно Fд=(2,3...2,4)Fв. Так, при дискретизации телефонных сигналов с диапазоном частот 0,3...3,4 кГц частота дискретизации равна 8 кГц (рисунок 1.9).
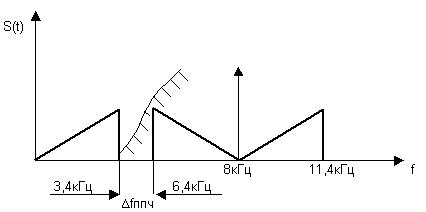
Рисунок 1.9. Выбор частоты дискретизации.
В данном случае упрощаются требования к параметрам ФНЧ, так как при этом образуется достаточно широкая (1,2 кГц) переходная полоса частот Δfппч для расфильтровки, которая позволяет использовать простые ФНЧ на приеме для восстановления непрерывного сигнала из последовательности его дискретных отсчетов.
Выбор частоты дискретизации группового сигнала. При построении систем ИКМ-ЧРК осуществляется дискретизация сигналов, диапазон частот которых соответствует диапазону частот стандартных групп в системах с ЧРК.
Рассмотрим вопросы выбора частоты дискретизации первичной стандартной 12-каналыюй группы со спектром частот 60...108 кГц. Диапазон частот группы ограничен не только сверху, но и снизу. Поэтому частоту дискретизации в этом случае выбирают так, чтобы в спектре АИМ сигнала спектр дискретизируемого сигнала не перекрывался с боковыми спектрами около частоты дискретизации и ее гармоник (рисунок 1.10).

Рисунок 1.10. Составляющие спектра сигнала при дискретизации первичной 12-канальной группы.
Для сигнала первичной стандартной 12-каналыюй группы при FД =110 кГц (рисунок 1.10) спектр АИМ сигнала содержит спектр дискретизируемого сигнала в диапазоне частот 60...108 кГц, нижнюю боковую полосу около частоты дискретизации, определяемую из условия:
ΔFнб1=Fд-(Fн…Fв)=110 кГц – (60…108) кГц,
верхнюю боковую полосу около частоты дискретизации ΔFнб1=Fд+(Fн…Fв)=110 кГц + (60…108) кГц = (170...218) кГц, нижнюю боковую полосу второй гармоники частоты дискретизации
ΔFнб2=2Fд-(Fн…Fв)=220 кГц – (60…108) кГц = (112..160) кГц,
верхнюю боковую полосу второй гармоники частоты дискретизации ΔFнб2=2Fд+(Fн…Fв)=220 кГц +(60…108) кГц = (280…328) кГц.
Как видно из рисунка 1.10, спектр полезного сигнала и спектры около частоты дискретизации и ее гармоник не перекрываются.
При таком выборе частоты дискретизации можно осуществить восстановление без искажений информационного сигнала из последовательности его отсчетов с помощью полосового фильтра (ПФ) с полосой пропускания 60...108 кГц.
Увеличение частоты дискретизации приводит к росту верхней частоты нижней боковой полосы (НБ1) и в пределе, при отсутствии перекрытия спектров НБ1 и информационного сигнала, верхняя частота нижней боковой полосы равна 60 кГц. Из этого следует, что при дискретизации групповых сигналов, ширина спектра которых ΔF<Fн (48<60 кГц для 12-канальной группы), частота дискретизации выбирается из условия Fв<Fд<2Fн. Для упрощения реализации ПФ, восстанавливающих непрерывный сигнал, Fд выбирается в середине диапазона 108...120 кГц для первичной стандартной 12-канальной группы.
Если ширина спектра группового сигнала ΔF<Fн, как, например, для третичной стандартной 300-канальной группы со спектром частот 812...2044 кГц, то частоту дискретизации можно выбрать из условия Fд>2 Fв, однако при этом не используется нижняя часть полосы частот до 812 кГц, что приводит к дополнительному расширению спектра АИМ сигнала. Для того чтобы исключить такое расширение спектра, вводят дополнительную ступень преобразования, с помощью которой спектр сигнала 300-канальной группы смещается вниз по оси частот в диапазон 60...1292 кГц. Это дает возможность снизить частоту дискретизации и выбрать ее из условия . Fд>2584 кГц.
1.1.4. Квантование по уровню
На рисунке 1.11 показаны отсчеты (дискреты) сигнала и их квантованные значения. В результате квантования передаются не истинные, а только разрешенные значения уровней.
Рисунок 1.11. Квантования сигнала.
На рисунке 1.11: Δ - шаг квантования;
E кв(t) - ошибка квантования.
Рисунок 1.12. Квантование.
Вместо a(pТд) передается aкв (i+1) или aкв i значения. Возникает ошибка квантования ?кв:
E кв i (pТд)= a(pТд) - aкв i (рисунок 1.12)
Квантование бывает:
- равномерное (Δ i = Δ i-1 = Δ i-2 =? );
- неравномерное.
В первом случае возможны два типа амплитудных характеристик (АХ) квантующих устройств. Они приведены на рисунке 1.13.
Рисунок 1.13. АХ квантующих устройств.
При АХ, изображенной на рисунке 1.13, а, возникают шумы в режиме молчания  , а при АХ, изображенной на рисунке 1.13, б, не воспроизводятся малые сигналы
, а при АХ, изображенной на рисунке 1.13, б, не воспроизводятся малые сигналы  .
.
Расчет мощности шумов квантования.
Ошибку квантования Eкв(t) можно рассматривать как некоторую помеху – шум квантования. Влияние его на качество связи можно оценить отношением:
 (1.3)
(1.3)
где Rкв – коэффициент шума квантования;
Рср.с – средняя мощность сигнала;
Ркв – мощность шума квантования.
Eкв(t) – последовательность прямоугольных импульсов с частотой Fд и случайной высотой. Полагаем, что t<<Тд.
Eкв(t) – случайная величина с плотностью вероятности Wкв(х). Допустим, что известна плотность вероятности распределения мгновенных значений квантуемого сигнала W(U), которая приведена на рисунке 1.14.
Весь диапазон от -Uогр до +Uогр разбит на М шагов квантования, а в общем случае различных (Δ i не равно const). Ui - разрешенное значение сигнала. Вероятность появления сигнала с амплитудой Ui, лежащей в пределах i – того шага квантования может быть найдена:

Так как Δ i <<Uогр, можно считать, что в пределах шага квантования  , то есть заменяем истинную площадь – площадью прямоугольника (заштрихованная зона). Тогда:
, то есть заменяем истинную площадь – площадью прямоугольника (заштрихованная зона). Тогда:
 (1.4)
(1.4)
Рисунок 1.14. Плотность вероятности квантованного сигнала.
Определим мощность шума квантования – Ркв. Мощность шума квантования в пределах i-того шага равна дисперсии случайной величины (U-Ui), где Ui – разрешенное значение сигнала в пределах этого шага.
 (1.5)
(1.5)
Общая мощность шума квантования от М шагов квантования:
 (1.6)
(1.6)
При равномерном квантовании Δ=const. Так как  , тогда:
, тогда:
 (1.7)
(1.7)
Заметим, что при неравномерном квантовании Ркв можно уменьшить, если для больших рi выбирать меньшие Δi, то есть для тех шагов квантования, где вероятность появления сигнала больше, выбирать меньший шаг квантования. Таким образом, при равномерном квантовании Ркв зависит только от Δ. Поэтому Rкв зависит только от мощности отсчета сигнала. Для того, чтобы не возникали шумы ограничения Uогр=Umax, где Umax - пиковые значения сигнала.
Определение числа уровней квантования.
(в разах) –  пик-фактор сигнала. Соответственно пик-фактор в дБм (децибелах по мощности):
пик-фактор сигнала. Соответственно пик-фактор в дБм (децибелах по мощности): 
Зная Uогр и Δ можно найти число уровней квантования при равномерной шкале для:
- двухполярных сигналов:
 (1.8)
(1.8)
- однополярных сигналов:
. (1.9)
(1.9)
Отношение сигнал/шум квантования в полосе частот от 0 до  :
:
 (1.10)
(1.10)
Энергетический спектр шумов квантования, то есть последовательности импульсов случайной амплитуды, но детерминированной частоты Fд и длительности tи, примерно равномерен в очень широкой полосе частот, если t<<Тд, то мощность этих шумов пропорциональна полосе частот Δf, в которой она определяется.
На приеме исходный сигнал выделяется ФНЧ с граничной частотой Fв, который уменьшает мощность шума квантования Ркв в раз , то есть:
, то есть:
 (1.11)
(1.11)
 (1.12)
(1.12)
Для речевых сигналов  дБ. Однако, учитывая разную длину абонентских линий,
дБ. Однако, учитывая разную длину абонентских линий, определяется как разность уровней мощности пиковых значений мощности на входе канала и средней мощности наиболее удаленного абонента. Тогда
определяется как разность уровней мощности пиковых значений мощности на входе канала и средней мощности наиболее удаленного абонента. Тогда  дБ.
дБ.
Исходя из нормирования помех, можно определить необходимое число уровней квантования:
 (1.13)
(1.13)
Защищенность от шумов квантования не должна быть меньше 25 дБ. Тогда . Подставив в формулу [1-14] Fд=8 кГц, Fв =3,4 кГц, дБ, получим  , что существенно усложняет возможности передачи ИКМ-сигнала.
, что существенно усложняет возможности передачи ИКМ-сигнала.
При неравномерном квантовании шаг квантования изменяется по определенному закону. Если уменьшать шаг квантования для более вероятных значений сигнала, то мощность шума квантования уменьшается. Однако, при этом вид АХ квантующего устройства зависит от закона распределения квантуемого сигнала. Поэтому обычно неравномерное квантование обеспечивает примерное постоянство Rкв для различных значений квантованных отсчетов сигнала.
Неравномерное квантование.
Неравномерное квантование можно обеспечить каскадным соединением компрессора с последующим равномерным квантователем. На приеме устанавливается экспандер. На рисунке 1.15 приведена схема с компрессором (К) и экспандером (Э), а так же равномерным квантующим устройством (КУ).

Рисунок 1.15. Нелинейное кодирование.
На рисунке 1.16 показаны АХ этих устройств.
Рисунок 1.16. АХ нелинейного квантующего устройства.
![]() ,
,  . (1.14)
. (1.14)
Величина Rкв будет постоянна, если Δкв линейно возрастает с ростом напряжения входного сигнала. Действительно  , а мощность сигнала
, а мощность сигнала  . Если
. Если  , то Rкв - постоянная величина. В этом случае
, то Rкв - постоянная величина. В этом случае . Отсюда, решая дифференциальное уравнение, получим:
. Отсюда, решая дифференциальное уравнение, получим:
 ,
,
где c, μ – постоянные интегрирования.
Эта зависимость не реализуема, так как при  и
и  , а из уравнения следует, что при ,
, а из уравнения следует, что при ,  . Поэтому используют близкую к оптимальной зависимость [1]:
. Поэтому используют близкую к оптимальной зависимость [1]:
Обычно  . Это так называемый закон компрессии или логарифмическая характеристика, где
. Это так называемый закон компрессии или логарифмическая характеристика, где  - коэффициент сжатия. На рисунке 1.17 приведены амплитудные характеристики квантователя при различных значениях.
- коэффициент сжатия. На рисунке 1.17 приведены амплитудные характеристики квантователя при различных значениях.
Возможен и несколько другой закон компрессии. Это А - закон. Для него [1]:
 (1.15)
(1.15)
Рисунок 1.17. АХ квантователя
А – закон несколько легче реализовать, хотя он дает меньшее Rкв. Очевидно, что компрессия уменьшает пик-фактор сигнала и, следовательно, позволяет уменьшить необходимое число уровней квантования. При μ –компрессии зависимость защищенности от шумов квантования от входного сигнала имеет вид, приведенный на рисунке 1.18.
Рисунок 1.18. Зависимость защищенности от шумов квантования.
Расчеты показывают, что введение компандирования уменьшает пик-фактор квантуемого сигнала приблизительно на 24 дБ, что позволяет вместо 2000 уровней применять М=128. В настоящее время используются цифровые методы реализации неравномерного квантования.
1.1.5. Кодирование
При цифровом представлении сигнала, дискретного по времени и амплитуде, каждому из уровней квантования по амплитуде присваивается свой номер, а его величина из десятичной системы счисления преобразуется в двоичную. Поэтому в дальнейшем можно передавать не сами отсчеты сигнала с их амплитудой, а группу импульсов, соответствующих номеру уровня квантования, выраженного в двоичной системе счисления, т. е. цифровой сигнал, который состоит из последовательности импульсов, причем наличие импульса свидетельствует о передаче единицы, а его отсутствие о передаче нуля. Цифровые сигналы по сравнению с аналоговыми обладают высокой помехоустойчивостью, так как при их обнаружении на фоне шумов необходимо определить лишь наличие импульса или его отсутствие.
При кодировании можно вместо значения сигнала передавать номер разрешенного уровня. Такой способ кодирования называется импульсно-кодовой модуляцией (ИКМ). В этом случае можно использовать двоичную систему счисления:
 , (1.16)
, (1.16)
где li –номер разрешенного уровня;
аi – принимает значения 0 или 1.
Общее количество уровней при m-разрядном кодировании:
 . (1.17)
. (1.17)
Чем больше разрядность кода, тем больше М и меньше шумы квантования. Используя формулу 1.14, защищенность от шумов квантования можно определить как:
 (дБ), (1.18)
(дБ), (1.18)
где  .
.
Увеличение m на 1 увеличивает Акв на 6 дБ.
Для кодирования АИМ-отсчета, то есть для формирования кодовой группы, необходимо какое-то время, в течение которого величина АИМ-сигнала не должна изменяться. Другими словами, АИМ-сигнал должен иметь плоскую вершину. Такой сигнал называется АИМ-2 (второго рода). На рисунке 1.19 показаны сигналы АИМ-1 и АИМ-2.
Рисунок 1.19. Сигналы АИМ-1 и АИМ-2
Спектр АИМ-1 отличается от спектра АИМ-2. Если  - спектральная плотность сигнала АИМ-1, то для сигнала АИМ-2 спектральная плотность составит
- спектральная плотность сигнала АИМ-1, то для сигнала АИМ-2 спектральная плотность составит (рисунок 1.20):
(рисунок 1.20):
Рисунок 1.20. Спектр АИМ-2.
Очевидно, что в этом случае боковые частоты несимметричны, а исходный сигнал выделяется ФНЧ с искажениями. Однако, если  , то есть, то
, то есть, то эти искажения несущественны. Практически, если
эти искажения несущественны. Практически, если  , то
, то  , для w не слишком большой величины. Таким образом, перед кодированием АИМ-1 преобразуется в АИМ-2. Кодовая m-разрядная группа содержит значения коэффициентов
, для w не слишком большой величины. Таким образом, перед кодированием АИМ-1 преобразуется в АИМ-2. Кодовая m-разрядная группа содержит значения коэффициентов  , соответствующий код называется простым или натуральным. Передается кодовая группа сочетанием импульсов и пробелов:
, соответствующий код называется простым или натуральным. Передается кодовая группа сочетанием импульсов и пробелов:
Использование натурального кода целесообразно при кодировании однополярного сигнала. При кодировании двухполярного сигнала используется симметричный код, где первый разряд знаковый:
0>(-); 1>(+).
Например, «-12» в 6-разрядном коде будет записано как 001100. Применение АИМ-2 необходимо и потому, что при АИМ-1 во время кодирования может произойти переход от одного разрешенного уровня к другому. В результате кодовая группа будет сильно отличаться от истинной. Кодирование осуществляется в кодерах. На приеме декодирование осуществляется в декодерах.
2. Групповой сигнал, его параметры
2.1. Групповой сигнал
В СП с ЧРК разделительным признаком канального сигнала является полоса частот, в которой он расположен. В ЦСП разделительным признаком канального сигнала является отрезок времени, в течение которого передается кодовая группа. Таким образом в этих системах используется разделение по времени. Такие системы называют ИКМ–ВРК (ИКМ–ВД). В групповом сигнале ЦСП с ИКМ–ВД объединяются кодовые группы разных каналов, разделенных по времени, которое осуществляется в процессе дискретизации путем сдвига отсчетных моментов в разных каналах на величину τк. За время τк происходит кодирование отсчета заданного канала, и формируется кодовая группа этого канала, то есть τк – это канальный интервал (КИ). Соответственно на эту величину и растягивается отсчет данного канала при формировании АИМ-2 сигнала рисунок 1.21.
Рисунок 1.21. Формирование группового сигнала.
При организации N каналов в ЦСП между двумя соседними отсчетами одного канала размещаются N канальных интервалов с m разрядами кодовых групп в каждом интервале. Каждый разряд (1 или 0) передаются на своей тактовой позиции рисунок 1.22. Время, отводимое на передачу одного символа (1 или 0) называют тактовым интервалом (ТИ).
Цикл передачи (Тц) – это минимальный отрезок времени, за который по разу передаются импульсы, выполняющие одинаковую функциональную нагрузку. Очевидно, что:
Рисунок 1.22. Цикл передачи.
 , (1.19)
, (1.19)
где tТ –длительность тактового интервала.
Рисунок 1.22 Цикл передачи.Число тактовых интервалов, переданное за единицу времени (1 секунда), есть скорость передачи В (бит/с), которая численно совпадает с тактовой частотой (fm), то есть частотой следования символов кода.  . (1.20)
. (1.20)
При m=8 и Fд=8 кГц, fm=64N кГц. Таким образом, скорость передачи в одном канале составляет 64 кбит/с. В цикле передачи организуется дополнительные канальные интервалы для передачи служебных сигналов (синхросигнал, СУВ). Цифровой групповой ИКМ – сигнал представляет собой случайную последовательность импульсов и имеет бесконечно широкий спектр частот. Действительно, любой однополярный двоичный сигнал можно представить в виде двух составляющих: регулярной и случайной (рисунок 1.23)
Рисунок 1.23. Разложение однополярного сигнала.
Разложение регулярной составляющей в ряд Фурье дает:
 . (1.21)
. (1.21)
Таким образом, в составе регулярной составляющей имеется постоянная составляющая и гармоники тактовой частоты. ![]() -скважность импульсной последовательности. При
-скважность импульсной последовательности. При 
 при четных n, то есть регулярная составляющая содержит нечетные гармоники тактовой частоты fm. Это, так называемая, дискретная часть спектра двоичного однополярного цифрового сигнала (рисунок 1.24).
при четных n, то есть регулярная составляющая содержит нечетные гармоники тактовой частоты fm. Это, так называемая, дискретная часть спектра двоичного однополярного цифрового сигнала (рисунок 1.24).
Рисунок 1.24. Дискретная часть спектра двоичного однополярного цифрового сигнала.
Рисунок 1.25. Спектральная плотность случайной составляющей.
Случайная составляющая имеет сплошной (непрерывный) спектр (рисунок 1.25), причем спектральная плотность этой непрерывной части спектра также изменяется по закону  .
.
Таким образом, спектр двоичного цифрового сигнала (ДЦС) имеет вид (рисунок 1.26):
Рисунок 1.26. Спектр двоичного цифрового сигнала.
Для передачи двоичного сигнала с допустимыми искажениями необходимо иметь тракт с полосой частот от 0 до 2 fm (первый лепесток). Таким образом, для ЦСП с ИКМ-ВРК нужен значительно более широкий спектр частот тракта по сравнению с аналоговыми системами передачи.
2.2. Структурная схема оконечной станции
Структурная схема оконечной станции первичных СП с ИКМ для одного направления передачи показана на рисунке 1.27.
Исходные сигналы u1(t), u2(t), …,uN(t), от 1,2,…, N абонентов через фильтр нижних частот (ФНЧ) поступают на канальные амплитудно-импульсные модуляторы (М), функцию которых выполняют электронные ключи. С помощью модуляторов осуществляется дискретизация передаваемых сигналов во времени. Сигналы с выходов модуляторов объединяются в групповой АИМ сигнал (Гр. АИМпер). Управляют работой модуляторов канальные импульсные последовательности, поступающие от генераторного оборудования (ГО) передачи. При этом импульсы подаются на модуляторы каналов поочередно (со сдвигом по времени), что и обеспечивает правильное формирование группового АИМ сигнала.
Рисунок 1.27. Структурная схема оконечной станции СП с ИКМ.
Длительность каждого импульса в этих последовательностях составляет примерно 125/2N мкс, что определяет длительность одного отсчета АИМ импульса канала, а период следования составляет125 мкс, что соответствует частоте дискретизации fд=8 кГц. Групповой АИМ сигнал поступает на кодирующее устройство – кодер (К), который одновременно осуществляет операции квантования по уровню и кодированию.
Сигналы управления и взаимодействия (СУВ), передаются по телефонным каналам для управления приборами АТС, поступают в передатчик (Пер.) СУВ, где они дискретизируются с помощью импульсных последовательностей, формируемых в ГОпер, и объединяются. В результате формируется групповой сигнал (Гр.) СУВ. В устройстве объединения (УО) кодовые группы каналов с выхода кодера, т.е. групповой ИКМ сигнал, кодированные сигнала СУВ и кодовая группа синхросигнала от передатчика синхросигнала (Пер. СС) объединяются, образуя циклы и сверхциклы. Соответствующими управляющими импульсами от ГОпер в УО обеспечивается правильный порядок следования циклов в сверхцикле и кодовых групп в цикле передачи. Принципы построения временной диаграммы цикла и сверхцикла показаны на рисунке 1.28. Циклы Ц1,Ц2,…,Цs, каждый длительностью 125 мкс, объединяются в сверхциклы, следующие друг за другом. Каждый цикл состоит из информационных канальных интервалов КИ1, КИ2,…КИN и дополнительных канальных интервалов, необходимых для передачи синхросигнала (СС) цикловой синхронизации, СУВ и других вспомогательных сигналов. На рисунке 1.28 дополнительные КИ выделены соответствующими обозначениями.
Рисунок 1.28. Временные диаграммы цикла и сверхцикла.
Каждый КИ представляет собой m-разрядную кодовую группу, в разрядах Р1, Р2,…,Рm которой передается закодированная информация соответствующего канала , а в дополнительных КИ – кодовые группы СС цикловой синхронизации и СУВ. Обычно за один цикл передаются СУВ одного или двух каналов. Таким образом, для передачи СУВ всех N каналов потребуется соответственно N или N/2 циклов, объединенных в сверхцикл. Такое объединение циклов в сверхцикл необходимо для организации нужного числа каналов передачи СУВ и правильного распределения этих сигналов на приеме. В первом цикле сверхцикла обычно передается СС сверхцикловой синхронизации, а СУВ не передаются. Таким образом, общее число циклов в сверхцикле S на один больше, чем требуется для передачи СУВ всех каналов. Скорость передачи группового ИКМ сигнала определяется тактовой частотой системы: fт=mN0fд, где N0 – общее число канальных интервалов в цикле, включая канальные интервалы для передачи СУВ, СС и других служебных сигналов. Так, для системы передачи ИКМ-30, где используется 8 –разрядный код, цикл содержит 32 канальных интервала, а fд=8 кГц, получим fт=8·32·8=2048 кГц. Необходимая скорость и последовательность работы передающих устройств СП обеспечиваются устройствами ГОпер. Сформированный ИКМ сигнал представляет собой набор однополярных двоичных символов, импульсы которых всегда имеют только одну, например положительную полярность. При передаче по линии такой сигнал подвержен значительным искажениям и затуханию. Поэтому перед передачей в линию однополярный ИКМ сигнал преобразуется в биполярный, удобный для передачи по линейному тракту. Это происходит в преобразователе кода передачи (ПКпер). В процессе передачи по линии ИКМ сигнал периодически восстанавливается (регенерируется) с помощью линейных регенераторов. На приемной станции ИКМ сигнал восстанавливается стационарным регенератором (РС) и поступает в преобразователь кода приема (ПКпр), где биполярный сигнал вновь преобразуется в однополярный. Устройство выделения тактовой частоты (ВТЧ) выделяет из этого сигнала тактовую частоту, которая используется для работы ГОпр. Этим обеспечивается синхронная и синфазная работа ГОпрд и ГОпр, причем правильное декодирование и распределение сигналов по соответствующим телефонным каналам и каналам передачи СУВ, обеспечиваются приемником синхросигналов (Пр. СС). Устройство разделения (УР) разделяет кодовые группы телефонных каналов и каналов СУВ. Приемник групповых сигналов управления и взаимодействия (Пр. СУВ), управляемый импульсными последовательностями, поступающими от ГОпр, распределяет СУВ по своим каналам, а декодер преобразует групповой ИКМ сигнал в групповой АИМ сигнал. Канальные импульсные последовательности, поступающие от ГОпр, поочередно открывают временные селекторы (ВС) каналов, обеспечивая выделение отсчетов каждого из каналов из группового АИМ сигнала. Восстановление исходного (непрерывного) сигнала из последовательности его АИМ отсчетов производится с помощью ФНЧ. Передача сигналов в обратном направлении осуществляется аналогично.
2.3. Линейный кодер взвешивания. Кодер взвешивающего типа
Его алгоритм подобен взвешиванию предмета на весах.
Рисунок 1.29. Структурная схема линейного кодера.
К – компаратор (схема сравнения).
Алгоритм работы компаратора: 
ГЭН – генератор эталонных напряжений.

где m – число информационных посылок, если разрядность кода равна 8, то одна посылка используется для кодирования знака отсчета, а информационных будет 7. ЛУ - логическое устройство. Импульсы тактовой частоты ( ) поступают из ГО пер и вызывают появление сигналов «1» на выходах логического устройства. Первый тактовый импульс появляется на нулевом (0) выходе ЛУ. При этом на вход компаратора эталонные напряжения не подключаются (UЭТ=0). Если кодируется положительный отсчет, то в конце такта замыкается ключ Кл+, и подключается на весь этап кодирования генератор положительных эталонных напряжений. В другом случае (UАИМ < 0) замыкается ключ Кл¯, и подключается на весь этап кодирования генератор отрицательных эталонных напряжений. Второй тактовый импульс вызывает появление сигнала «1» на первом (1) выходе ЛУ, и к входу компаратора 2 подключается UЭТ1. Сигнал «1» с выхода компаратора оставит это напряжение подключенным до конца этапа кодирования, а сигнал «0» отключит это эталонное напряжение. Каждый последующий тактовый импульс вызывает появление сигнала «1» на соответствующих выходах ЛУ и подключение соответствующего эталонного напряжения. Сигнал «1» с выхода компаратора оставляет UЭтi подключенным, а сигнал «0» отключает их. В конце восьмого такта из ГО пер поступает сигнал сброса, который устанавливает все устройства в исходные состояния. Рассмотрим пример кодирования. Закодируем отсчет UАИМ=107Δ, где Δ–величина напряжения шага квантования.
) поступают из ГО пер и вызывают появление сигналов «1» на выходах логического устройства. Первый тактовый импульс появляется на нулевом (0) выходе ЛУ. При этом на вход компаратора эталонные напряжения не подключаются (UЭТ=0). Если кодируется положительный отсчет, то в конце такта замыкается ключ Кл+, и подключается на весь этап кодирования генератор положительных эталонных напряжений. В другом случае (UАИМ < 0) замыкается ключ Кл¯, и подключается на весь этап кодирования генератор отрицательных эталонных напряжений. Второй тактовый импульс вызывает появление сигнала «1» на первом (1) выходе ЛУ, и к входу компаратора 2 подключается UЭТ1. Сигнал «1» с выхода компаратора оставит это напряжение подключенным до конца этапа кодирования, а сигнал «0» отключит это эталонное напряжение. Каждый последующий тактовый импульс вызывает появление сигнала «1» на соответствующих выходах ЛУ и подключение соответствующего эталонного напряжения. Сигнал «1» с выхода компаратора оставляет UЭтi подключенным, а сигнал «0» отключает их. В конце восьмого такта из ГО пер поступает сигнал сброса, который устанавливает все устройства в исходные состояния. Рассмотрим пример кодирования. Закодируем отсчет UАИМ=107Δ, где Δ–величина напряжения шага квантования.
| № такта | Знак Вх. 0 | 26 1 | 25 2 | 24 3 | 23 4 | 22 5 | 21 6 | 20 7 | сравнение | |
| 1 | Н | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | UАИМ< UЭТ=0 |
| К | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ГЭН+ подключен. | |
| 2 | Н | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | UЭТ1=26=64Δ<107Δ |
| К | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | U3 =1, UЭТ1=64Δ не отключается | |
| 3 | Н | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | UЭТ1+ UЭТ2 =64Δ+32Δ =96Δ <107Δ |
| К | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | U3 =1,UЭТ2=32Δ не отключается | |
| 4 | Н | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | UЭТ1+ UЭТ2+ UЭТ3=112Δ>107Δ |
| К | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | U3 =0,UЭТ3=16Δ отключается | |
| 5 | Н | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | UЭТ1+ UЭТ2+ UЭТ4=104Δ<107Δ |
| К | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | U3 =1,UЭТ4=8Δ не отключается | |
| 6 | Н | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 0 | UЭТ1+ UЭТ2+ UЭТ4+ UЭТ5=108Δ>107Δ |
| К | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | U3 =0,UЭТ5=4Δ отключается | |
| 7 | Н | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | UЭТ1+ UЭТ2+ UЭТ4+ UЭТ6=106Δ<107Δ |
| К | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | U3 =1,UЭТ6=2Δ не отключается | |
| 8 | Н | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | (UЭТ1+UЭТ2+UЭТ4+UЭТ6+UЭТ7)=107Δ |
| К | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | U3 =1,UЭТ7=Δ не отключается | |
Кодирование завершено. Ошибка квантования равна 0.
2.4. Нелинейный кодер
Кодер с линейной шкалой квантования называется линейным, а с нелинейной шкалой квантования - нелинейным. Аналогичное определение относится и к декодерам. По принципам действия кодеры делятся на три основные группы: счетного типа, взвешивающего типа и матричные.
Квантование сигнала с линейной шкалой характеристики не позволяет получить высокое качество передачи сигнала с малой амплитудой. Поэтому в системах ИКМ-ВРК квантование с линейной шкалой практически не применяется.
Необходимое качество передачи сигналов достигается при выполнении квантования с неравномерной шкалой. Построение такой квантующей характеристики может осуществляться различными методами. Один из них - это применение аналогового компандера в сочетании с линейным кодером и декодером. Но из-за указанных недостатков этот способ распространения не получил.
В системах ИКМ-ВРК вместо плавной амплитудной характеристики, которую имеют аналоговые компандеры, применяются сегментные характеристики. Они представляют собой кусочно-ломаную аппроксимацию плавных характеристик, при которой изменение крутизны происходит дискретными ступенями. Наибольшее распространение получила сегментная характеристика компандирования типа А-87,6/13, где аппроксимация логарифмической характеристики производится по так называемому А-закону, соответствующему выражениям [1]:
 (1.22)
(1.22)
Здесь А - коэффициент компрессии, равный 87,6, а сама характеристика строится из 13 сегментов. Такая характеристика показана па рисунке 1.30. Она содержит в положительной области сегменты C1, С2, Сз,...C8, находящиеся между точками (узлами) 0-1, 1-2, 2-3, …, 7-8. Аналогичным образом строится характеристика для отрицательной области значений входного сигнала. Четыре центральных сегмента (два в положительной и два в отрицательной областях) объединяются в один центральный сегмент, поэтому общее число сегментов на двухполярной характеристике равно 13. Каждый из 16 сегментов характеристики содержит по 16 шагов (уровней), квантования, а общее число уровней равно 256, из них 128 положительных и 128 отрицательных. Каждый сегмент начинается с определенного эталона, называемого основным. Эти эталоны на рисунке 1.30 указаны в начале каждого сегмента. Шаг квантования внутри каждого сегмента равномерный, а при переходе от одного к другому сегменту изменяется в 2 раза, начиная с центрального сегмента, куда входят С1, и С2. Значения основных и дополнительных эталонов, шагов квантования даны в таблице 1.1 [1].
Таблица 1.1 Значения основных и дополнительных эталонов.
|
Номер сегмента |
Кодовая комбинация номера сегмента |
Эталонные сигналы |
Шаг квантования |
Эталонные сигналы коррекции |
||||
|
основной |
дополнительные |
|||||||
|
1 |
000 |
8 |
4 |
2 |
1 |
1 |
0,5 |
|
|
2 |
001 |
12 |
8 |
4 |
2 |
1 |
1 |
0,5 |
|
3 |
010 |
32 |
16 |
8 |
4 |
2 |
2 |
1 |
|
4 |
011 |
64 |
32 |
16 |
8 |
4 |
4 |
2 |
|
5 |
100 |
128 |
64 |
32 |
16 |
8 |
8 |
4 |
|
6 |
101 |
256 |
128 |
64 |
32 |
16 |
16 |
8 |
|
7 |
110 |
512 |
256 |
128 |
64 |
32 |
32 |
16 |
|
8 |
111 |
1024 |
512 |
256 |
128 |
64 |
64 |
32 |
Все эталонные значения в таблице 1.1 даны в условных единицах по отношению к значению минимального шага квантования. Сочетание дополнительных эталонов позволяет получить любой из 16 уровней квантования в данном сегменте. При изменении шага квантования изменяется крутизна характеристики. Изменение крутизны происходит в точках (узлах) характеристики.

Рисунок 1.30. Характеристика компрессии типа А-87,6/13.
Четыре центральных сегмента (два в положительной и два в отрицательной областях характеристики) имеют одинаковую крутизну и равные шаги квантования. При таком построении характеристики минимальный шаг квантования Δmin имеют сегменты С1 и С2 а максимальный Δmax -сегмент C8, причем отношение Δmax/ Δmin составляет 26. или 64. Это значение примерно характеризует параметр сжатия для сегментной характеристики компандирования, или параметр А. Точное значение этого параметра для непрерывной характеристики типа А определяется из выражения: и при числе сегментов nc= 8 значение A =87,6.
 . (1.23)
. (1.23)
Эффективность рассмотренной характеристики можно оценить визуально, если обратить внимание на то, что 112 уровней из 128 используются для квантования сигналов, амплитуда которых не превышает половины максимальной, 64 уровня для квантования сигналов, амплитуда которых не превышает 6,2% максимальной. Рассмотрим особенности этапов кодирования и декодирования сигналов при нелинейной характеристике квантования. В случае сегментной характеристики компрессии типа А-87,6/13 для кодирования абсолютных величин отсчетов необходимо 11 эталонов с условными весами, равными 20, 21, 22, 23, ..., 210, или 1, 2, 4, ..., 1024 уровнями квантования. При линейном кодировании такая характеристика эквивалентна характеристике квантования с 2048 уровнями. Для кодирования 2048 положительных и 2048 отрицательных уровней потребуется 12-разрядная кодовая группа. При нелинейном кодировании для обеспечения такой же защищенности Акв≥ 25 дБ потребуются 128 положительных и 128 отрицательных уровней, а кодовая группа – 8 разрядная.
Кодирование осуществляется за восемь тактов и включает три основных этапа: 1 -определение кодирование полярности входного сигнала; 2 номера сегмента узла, в котором заключен кодируемый отсчет; 3 уровня квантования сегмента, зоне которого заключена амплитуда кодируемого отсчета. Первый этап кодирования 1-й такт, второй этап—за 2...4-й такты, третий 5...8-й такты кодирования. Работа кодера на первом этапе при определения кодировании отсчета не отличается от работы линейного кодера. На втором определяется кодируется узел характеристики, определяющей начало находится отсчета, например узла 0, если отсчет находится сегменте 1; 1, 2; 2, 3, т. д. Для этого выбирается алгоритм работы, обеспечивающий определение характеристики такта В такте I> c сравнивается с эталонным током Iэт4. Если при сравнении окажется, что Ic<>Iэт4, это означает нахождение Ic в 5...8-м сегментах характеристики, и вместо тока Iэт4 включается ток Iэт6. Если при сравнении окажется, что Ic<Iэт4, это означает нахождение Ic в 1...4-м сегментах характеристики, и вместо тока Iэт4 включается ток Iэт2. Далее в зависимости от результата сравнения на втором этапе кодирования, если Ic>Iэт6, включается ток Iэт7. или если Ic<Iэт6, включается Iэт5. Аналогично подбираются эталоны, если на втором этапе был включен Iэт2. Результат сравнения в третьем такте кодирования позволяет окончательно выбрать номер узла характеристики, определяющий начало сегмента. Результат представляется двоичной кодовой комбинацией, занимающей 2...4-й разряды кодовой группы. Кодовые комбинации номера сегмента даны в таблице 1.1. На третьем этапе определяется и кодируется номер уровня квантования внутри выбранного сегмента, в зоне которого находится амплитуда кодируемого отсчета. Необходимо напомнить, что число шагов квантования внутри сегмента равно 16, шаг квантования равномерный, равен ∆с и для каждого сегмента свой. Третий этап осуществляется за четыре такта методом линейного кодирования. При кодировании в дополнение к основному эталону, определяющему начало сегмента, подключаются дополнительные эталоны с весами 8∆с, 4∆с, 2∆с, ∆с (таблица 1.1). В результате сравнения определяется номер уровня квантования, в зоне которого находится амплитуда отсчета.
Итак, в результате выполнения указанных операций получается 8-разрядная кодовая комбинация двоичных символов, 1-й разряд который указывает полярность кодируемого отсчета; 2..4-й разряды -номер сегмента узла характеристики компрессии; 5...8-й разряды -номер шага квантования внутри этого сегмента, в зоне которого заключена амплитуда кодируемого отсчета. Например, кодовая комбинация двоичных символов 11011010 означает, что кодированию подлежит отсчет положительной полярности, амплитуда которого находится в сегменте 6 и заключена в зоне 10-го уровня квантования этого сегмента. На характеристике компрессии это соответствует сигналу с амплитудой в зоне 90-го уровня квантования. При декодировании осуществляется обратное цифро-аналоговое преобразование. Характеристика экспандирования нелинейного декодера должна быть обратной характеристике компрессии нелинейного кодера (рисунок 1.31).
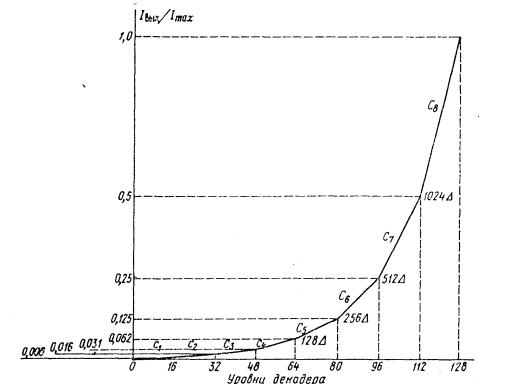
Рисунок 1.31. Характеристика экспандирования типа А=87,6/13
Входным сигналом декодера является 8-разрядная кодовая группа, определяющая полярность и величину отсчета (номер сегмента и уровень его квантования). В соответствии с принятой кодовой комбинацией цифровые ЛУ выбирают основной эталон, определяющий начало сегмента и соответствующие дополнительные эталоны, суммарный ток которых определяет величину декодируемого АИМ сигнала. Например, при декодировании комбинации двоичных символов 11011010 будут включены источник эталонных токов положительной полярности и эталонные токи с весами, равными основному эталону узла 6, который равен 256 уровней квантования и второму и четвертому дополнительным эталонам сегмента 6, что будет равно 256+128+32=416 уровней квантования. Учитывая особенности построения нелинейной характеристики квантования декодера, которая аналогична рассмотренным ранее характеристикам линейного декодера, для уменьшения искажений при декодировании используется еще один, 12-й эталон. 3начение этого эталона для каждого сегмента свое, и равно половине шага квантования в этом сегменте. Эталоны коррекции приведены в таблице 1.1.
Принцип построения нелинейного кодера взвешивающего типа с цифровой компрессией эталонов дан на рисунок 1.32.
Рисунок 1.32. Структурная схема нелинейного кодера.
Кодер содержит компаратор (К), блок выбора и коммутации эталонных токов (БКЭ), генератор положительных (ГЭТ1) и отрицательных (ГЭТ2) эталонных токов, компрессирующую логику (КЛ), цифровой регистр (ЦР) и преобразователь кода (ПК). Компаратор определяет знак разности между амплитудами токов кодируемого отсчета Iс и эталона Iэт. Принцип работы компаратора при оценке импульсов положительной и отрицательной полярности описан ранее. Генератор эталонов формирует полярность и величины эталонов. По построению он аналогичен ГЭТ линейного кодера, только количество формируемых эталонов равно 11, а значения этих эталонов равны 1, 2, 4, .... 1024 уровней квантования. Цифровой регистр, служит для записи решений компаратора после каждого такта кодирования и формирования структуры кодовой группы. В зависимости от решений компаратора ЦР выбирает полярность ГЭТ и управляет работой компрессирующей логики. По мере образования кодовой комбинации формирователь считывает состояние выходов 1, 2, ..., 8 ЦР, преобразуя параллельный код в последовательный. Работой узлов кодера управляют устройства генераторного оборудования системы передачи. Принцип работы нелинейного кодера во многом аналогичен работе линейного. Поясним работу нелинейного кодера на примере кодирования отсчета положительной полярности с амплитудой, равной 0,2·Im, что равно примерно 410 уровню квантования. В исходном положении выходы 1...8 ЦР находятся в состоянии 0, ГЭТ отключены и Iэт=0. Кодируемый отсчет Iс подается па вход 1 компаратора. В момент, предшествующий первому такту кодирования, первый выход ЦР переводится в состояние 1, чем включается ГЭТ1 положительной полярности. Ток Iэт=0, а Iс >0, поэтому на выходе компаратора (точка 3) в первом такте кодирования будет сформирован 0, и состояние 1 первого выхода ЦР сохранится. На этом заканчиваемся первый этап, в котором определяется и кодируется полярность отсчета. Второй этап кодирования определение и кодирование номера сегмента, в котором заключена амплитуда отсчета, начинается с того, что в состояние 1 переводится второй выход ЦР и па вход 2 компаратора подается ток Iэт4 величиной 128 уровней квантования (узел 4 характеристики компрессии). Поскольку в этом случае Iс > Iэт, во втором такте кодирования на выходе компаратора будет сформирован 0, и состояние 1 второго выхода ЦР сохранится. Далее эталон 128 уровней квантования снимается и в состояние 1 переводится третий выход ЦР, в результате чего на вход 2 компаратора вместо Iэт4 подается Iэт6 величиной 512 уровней квантования. В этом случае Iс < Iэт, поэтому в третьем такте кодирования на выходе компаратора будет сформирована 1, которая изменит состояние третьего выхода ЦР с 1 на 0. В состояние 1 переводится четвертый выход ЦР и па вход 2 компаратора вместо Iэт6 подается Iэт5 величиной 256 уровней квантования. Так как Iс > Iэт5, то в четвертом такте кодирования на выходе компаратора будет 0, и состояние четвертого выхода ЦР сохранится. Итак, по окончании второго этапа кодирования 2...4-й выходы ЦР будут отмечены состоянием 101 соответственно, что в двоичном коде определяет номер узла (сегмента), в пределах которого находится амплитуда кодируемого отсчета узел 5 (сегмент C5). Третий этап кодирования определение и кодирование номера уровня квантования сегмента, в пределах которого находится амплитуда отсчета Iс. Таких уровней квантования в пределах каждого сегмента 16, и все они могут быть получены с помощью дополнительных эталонных значений (таблица 1.1). Для данного примера, когда Iс находится в сегменте 6, используются дополнительные эталонные значения 128, 64, 32, 16, а шаг квантования равен 16. В начале третьего этапа кодирования в состояние 1 переводится 5-й выход ЦР и к эталонному току 256 добавляется эталонный ток 128.Суммарный ток па входе 2 компаратора в этом случае составит 384 уровней квантования. Поскольку при этом Iс > Iэт, в пятом такте кодирования на выходе компаратора будет 0 и состояние 1 пятого выхода сохранится. В состояние 1 переводится 6-й выход ЦР, и к эталонным токам 384 прибавляется эталонный ток 64. Суммарное значение эталонного тока на входе 2 компаратора в этом случае составит 448 уровней квантования, что больше Iс. Решение компаратора в шестом такте кодирования будет 1 и состояние 6-го выхода ЦР будет изменено с 1 на 0, что означает отключение эталонного тока 64. В состояние 1 переводится 7-й выход ЦР, и к эталонному току 384. добавится эталонный ток 32. Суммарное значение эталонного тока на входе 2 компаратора станет равным 416 уровней квантования, что больше Iс. Поэтому в седьмом такте кодирования на выходе компаратора будет 1 и состояние 7-го выхода ЦР будет изменено с 1 на 0, что означает отключение эталонного тока 32. Наконец, в состояние 1 переводится последний 8-й выход ЦР, и к эталонному току 384 добавляется эталонный ток 16. Суммарное значение эталонного тока на входе 2 компаратора станет равным 400 уровней квантования. Очевидно, что решение компаратора в восьмом такте кодирования будет 0 и состояние 1 выхода 8 сохранится. Таким образом, по окончании третьего этапа кодирования 5...8-й выходы ЦР будут иметь состояние 1001, что в двоичном коде указывает па 9-й уровень квантования, находящийся в 6-м сегменте. Итак, отсчет с амплитудой 0,2·Im (410 уровней квантования) закодирован 8-разрядпой кодовой комбинацией 11011001, указывающий, что кодируемый отсчет имеет положительную полярность, находится в зоне 89-го уровня квантования и имеет вес 400. Нетрудно заметить, что в данном случае ошибка квантования составила 10. По мере завершения тактов кодирования преобразователь кода ПК считывает состояние выходов 1...8 ЦР, преобразуя параллельный код в последовательный.
Декодер осуществляет цифро-аналоговое преобразование кодовых групп ИКМ сигнала в АИМ сигнал, т. е. в отсчеты нужной полярности и амплитуды. Принцип построения нелинейного декодера взвешивающего тина с цифровым экспандированием эталонов поясняется на рисунок 1.33.
Декодер содержит цифровой регистр (ЦР), блок экспандирующей логики (ЭЛ), блок выбора и коммутации эталонных токов (БКЭ) и два генератора эталонных токов положительной (ГЭТ1) и отрицательной (ГЭТ2) полярностей.
Рисунок 1.33. Структурная схема нелинейного декодера.
Восьмиразрядная кодовая группа принятого ИКМ сигнала записывается в ЦР, формируясь на его выходах 1...8 в виде параллельного 8-разрядного двоичного кода. Первый разряд этой кодовой комбинации определяет полярность включаемого ГЭТ, а 2..8-й разряды номер сегмента и уровня квантования на характеристике экспандирования. В соответствии с принятой кодовой комбинацией включаются соответствующие эталоны, суммарный ток которых определяет величину (амплитуду) декодированного отсчета АИМ сигнала. Так, при декодировании кодовой комбинации 11011001 включается ГЭТ1 положительной полярности и ключи эталонных токов 256, 128, 16 с суммарным значением 400 уровней квантования.
Как отмечалось ранее, для уменьшения искажений при декодировании используется еще 12-й корректирующий эталон, равный значению 0,5 шага квантования сегмента. Для данного примера корректирующий эталонный ток равен 8 и общее суммарное значение эталонных токов будет равно 408 уровней квантования.
3. Системы синхронизации в ЦСП
3.1. Тактовая синхронизация
Выделение тактовой частоты. Устройства тактовой синхронизации УТС обеспечивают синхронную работу ГО приемной и передающей частей ЦСП. Только в этом случае ГО приемной части будет вырабатывать управляющие сигналы, совпадающие по частоте и времени с импульсными последовательностями, поступающими в приемное оборудование ЦСП из линейного тракта, обеспечивая тем самым правильную цифровую обработку сигналов. Следовательно, основная задача УТС - исключить расхождение частот ГО передачи и приема или, в крайнем случае, обеспечить небольшую величину этого расхождения. Как известно, в аналоговых системах передачи для этих целей применяют, в основном, технические решения, обеспечивающие стабилизацию частоты задающих генераторов приемного и передающего оборудования (например, кварцевую стабилизацию). Рассмотрим, достаточно ли применения принципа стабилизации частоты ЗГ для цифровых систем передачи.
Предположим, что частота ЗГ первичной ЦСП fЗГfт=2,048 МГц. Определим максимально допустимую относительную нестабильность частоты ЗГ:
k=ΔfЗГmaxfЗГн,
где fЗГн - номинальное значение fЗГ, а ΔfЗГmax - максимальное отклонение частоты ЗГ от поминального значения.
Очевидно, что в предельном случае управляющий распределительный импульс может не совпадать по временному положению с регистрируемым на величину, равную длительности одного символа, т. е. половину тактового интервала Т/2 (в этом случае говорят о не синхронности передающего и приемного оборудования по символам). В наихудшем случае при отклонении частот ЗГ в разные стороны от fЗГн на величину Δmax взаимное положение регистрируемого и управляющего импульсов должно отличаться на ΔT/2=1 (2fт н). При этом период fт не должен изменяться больше чем на Т/4 [4]. Предположим, что в момент включения системы частоты ЗГ передающей и приемных частей первичной ЦСП одинаковы и в дальнейшем расходятся. Определим, за какой промежуток времени tПС при относительной нестабильности k частот ЗГ будет достигнуто положение не синхронности по символам. Так как tПС=Т/(4k)=1/(4fтk), то, следовательно, k=1/(4fтtПС)≈1/(8·106tПС). Если принять, что система будет выходить из состояния синхронизма каждый час (а это будет очень плохая система, так как выход из состояния синхронизма по символам приводит к прекращению связи), то требуемая в этом случае относительная нестабильность частоты ЗГ составит k =1/(8·106·3,6·103)≈3,7·10-11, что недостижимо по техническим и экономическим соображениям. Вывод, следующий из вышеприведенных расчетов: реализация современных ЦСП без устройств тактовой синхронизации (фазирования по посылкам) невозможна. В ЦСП к устройствам тактовой синхронизации предъявляются следующие требования:
1) высокая точность подстройки частоты и фазы управляющего сигнала ЗГ приемной части;
2) малое время вхождения в синхронизм;
3) сохранение состояния синхронизма при кратковременных перерывах связи.
Различают две группы УТС, отличающиеся методом использования синхросигналов. К первой группе относятся устройства с синхронизацией по специальному синхросигналу. Этот метод усложняет построение линейного тракта ЦСП и генераторного оборудования, к тому же точность установки фазы управляющих сигналов в большой степени связана с нелинейными искажениями и неравномерностью частотных характеристик линейного тракта. Ко второй группе относятся методы подстройки фазы управляющих импульсов под основной принимаемый сигнал. Такую подстройку можно осуществить либо по специальным синхроимпульсам, либо по рабочим импульсам (элементам кодовых комбинаций цикла). Применение специальных синхроимпульсов снижает пропускную способность системы, поэтому на практике нашел применение метод тактовой синхронизации по рабочим импульсам. Эту группу УТС можно разделить на две подгруппы, отличающиеся способом выделения тактовой частоты. Основное применение в ЦСП с невысокой скоростью передачи нашли УТС c резонансной системой для выделения тактовой частоты. Достоинства таких систем — простота реализации и, как следствие, улучшение экономических показателей системы, являются определяющими при реализации ЦСП местных и зоновых сетей. Недостатки УТС такого типа: быстрое пропадание тактовой частотны при перерывах связи или при появлении в принимаемом сигнале длинных серий пробелов (нулей); зависимость стабильности выделенной тактовой частоты (а следовательно, и точности фазирования) от длины серии нулей (характера кодовых комбинаций) и стабильности параметров фильтра, выделителя тактовой частоты, а также от скорости передачи. Более сложным является метод синхронизации с применением устройств автоподстройки частоты генераторов тактовой частоты приемного оборудования, лишенный недостатков первого метода. Иногда эти два метода называют соответственно методами пассивной и активной фильтрации частоты. Устройства тактовой синхронизации с активной фильтрацией получают все большее распространение в ЦСП в связи с их достоинствами и упрощением вопросов реализации на основе более совершенной элементной базы, обеспечиваемой развитием микроэлектроники. Сущность метода пассивной фильтрации тактовой частоты состоит в том, что из входного цифрового сигнала с помощью полосовых фильтров, резонансных контуров или избирательных усилителей выделяется тактовая частота. Часть УТС, обеспечивающая выполнение этих функций, называется выделителем тактовой частоты (ВТЧ). Структурная схема этого устройства приведена на рисунке 1.34: ВС - входной сигнал, СИ – синхроимпульс, ФСИ – формирователь синхроимпульса.
Рисунок 1.34. Структурная схема выделителя тактовой частоты.
Рассмотрим сущность резонансного метода. Известно, что энергетический спектр случайной последовательности импульсов со скважностью q>1 содержит как непрерывную Gн(f), так и дискретную Gд(f) составляющую (рисунок 1.35, а). Дискретная часть энергетического спектра представляет собой сумму гармоник, кратных тактовой частоте (частоте следования импульсов). Этот вывод можно сделать, не применяя сложных математических выкладок, если представить, случайный двоичный сигнал и в виде суммы регулярной однополярной последовательности импульсов и случайной двухполярной последовательности импульсов [1].

Рисунок 1.35. Принцип выделения тактовой частоты из спектра случайного сигнала.
Как известно, регулярная последовательность импульсов с тактовой чистотой fт имеет дискретный (линейчатый) спектр Gд(f), в составе которого в качестве первой гармоники выступает составляющая с частотой, равной тактовой. Попутно отметим, что случайная двухполярная последовательность импульсов, как видно из рисунка 1.35, б, не может быть в свою очередь получена как сумма случайной и регулярной составляющих и, следовательно, спектр такой последовательности не содержит дискретных составляющих. Очевидно, что превращение двухполярной последовательности в однополярную (например, применением выпрямительных устройств) позволяет восстановить дискретную часть спектра. Следует обратить внимание на то, что если линейный сигнал представляет собой случайную последовательность импульсов с частотой fт и q=1, то энергетический спектр такого сигнала вообще не содержит дискретной части спектра. Сказанное можно проследить по рисунку 1.36, а на котором показано, что, если q→1, то регулярная последовательность импульсов «сливается» в постоянную составляющую.
Для получения тактовой частоты в этом случае приходится применять более сложный метод нелинейного преобразования, чем выпрямление. В таких случаях можно применить метод выделения фронтов, позволяющий увеличить, скважность двоичной последовательности импульсов и тем самым ввести в спектр преобразованного сигнала дискретную составляющую. На рисунке 1.36, б приведен пример реализации принципа выделения фронтов сигнала со скважностью q=1. С этой целью кроме входной импульсной последовательности формируется последовательность импульсов, полученная из входной сдвигом на половину тактового интервала. Вычитание из первой последовательности второй приводит к формированию случайной двухполярной последовательности со скважностью q=2 и тактовой частотой, равной, как видно из рисунка, тактовой частоте входной последовательности. Выпрямление двухполярной последовательности формирует однополярный сигнал с тактовой частой, равной тактовой частоте входной случайной последовательности импульсов, и скважность q=2>1, содержащей в спектре дискретную составляющую с частотой, равной тактовой. Аналогичных результатов можно достигнуть, используя для выделения фронтов дифференцирующие цепочки. В практических случаях на вход ВТЧ двоичный сигнал приходит искаженным, с «заваленными фронтами», а в некоторых случаях устройствами линейного тракта специально формируют сигнал в виде колоколообразных импульсов. Формирование импульсной последовательности со скважностью q>1 в этом случае возможно путем одностороннего или двухстороннего ограничения, что и показано на рисунке 1.36, в
Рисунок 1.36. Получение тактовой частоты из последовательности импульсов, «затянутых на тактовый интервал».
В оконечной приемной аппаратуре при резонансном методе тактовой синхронизации, как правило, в качестве ЗГ используется ВТЧ, благодаря чему обеспечивается жесткое фазирование управляющих импульсных последовательностей приемной части относительно управляющих импульсных последовательностей передающей части системы. Выделенный гармонический сигнал тактовой частоты обычно преобразуется в основную управляющую импульсную последовательность с частотой следования, равной fт, из которой в ГО формируют другие управляющие сигналы. Для формирования тактовых импульсов использую специальные устройства формирования синхроимпульсов ФСИ. Устройства активной фильтрации тактовой частоты могут быть подразделены на две группы: с непосредственным воздействием на местный ЗГ тактовой частоты; с воздействием на промежуточный преобразователь ПП тактовой последовательности.
Структурные схемы УТС с активной фильтрацией представлены на рисунке 1.37.
В схеме с непосредственным воздействием на ЗГ (рисунок 1.37, а) подстройка тактовой частоты под частоту принимаемых импульсов осуществляется по управляющему напряжению UР Ф, снимаемому с фазового дискриминатора (ФД), значение и знак которого зависят от значений и знака разности фаз входных сигналов ФД. Так как напряжение UР Ф на выходе ФД имеет дискретный характep, непрерывное регулирование частоты ЗГ можно осуществить, пропуская напряжение UР Ф через интегратор (сглаживающую цепочку) (I).
Во втором случае (рисунок 1.37, б) изменение тактовой частоты осуществляется изменением числа импульсов, поступающих на вход делителя частоты (ДЧ) через схему управления (СУ). Управление осуществляется от сигнала с выхода ФД, пропущенного через цифровой интегратор на основе реверсивного счетчика PC.
Рисунок 1.37. Структурная схема устройства активной фильтрации тактовой частоты.
3.2. Цикловая синхронизация
Синхронизация приемной и передающей станции по циклам обеспечивает правильное декодирование кодовых групп и распределение группового АИМ сигнала по соответствующим приемникам каналов. Для обеспечения этой синхронизации в начале каждого цикла в состав группового цифрового сигнала вводится специальный синхросигнал, который представляет собой отдельный импульс или группу импульсов определенной комбинации.
К системам цикловой синхронизации предъявляются следующие основные требования:
1) время вхождения в синхронизм при первоначальном включении аппаратуры в работу и время восстановления синхронизма при его нарушении должно быть минимально возможным;
2) число разрядов синхросигнала в цикле передачи при заданном времени восстановления синхронизма должно быть минимальным;
3) приемник синхросигнала должен быть помехоустойчивым, что обеспечивает большее среднее время между сбоями синхронизма.
При реализации этих требований приходится решать противоречивые задачи. Ввод синхросигнала в групповой сигнал дополнительно к кодовым группам информации требует увеличения скорости передачи группового сигнала, а это увеличивает полосу частот, передаваемых по линии. Если скорость передачи оставить прежней, то синхросигнал надо вводить взамен части информационных символов, а это уменьшает пропускную способность системы передачи. Аналогичные противоречия встречаются и при выборе числа разрядов в синхросигнале. Уменьшение разрядов в синхросигнале повышает пропускную способность ЦСП, но увеличивает время восстановления синхронизма, так как возрастает вероятность появления аналогичных комбинаций в информационных символах. Увеличение разрядов в синхросигнале улучшает работу цикловой синхронизации, но уменьшает пропускную способность ЦСП. Отметим основные отличительные признаки синхросигнала и способы ввода его в групповой сигнал. Основными отличительными особенностями синхросигнала являются его периодичность, или повторяемость, на одних и тех же позициях в каждом цикле и постоянство кодовой комбинации. Эти свойства используются при выделении синхросигнала на приемной станции. Групповой цифровой сигнал каналов в силу случайного характера абонентских сигналов свойствами периодичности не обладает. По числу разрядов различают одноразрядные и многоразрядные синхросигналы. Многоразрядные синхросигналы различаются по распределению разрядов в цикле передачи: сосредоточенные, рассредоточенные. На рисунке 1.38 показаны циклы, содержащие одноразрядный (рисунок 1.38, а) и многоразрядные (с комбинацией 101) сосредоточенный (рисунок 1.38, б) и рассредоточенный (рисунок 1.38, в) синхросигналы. Наибольшее распространение в ЦСП получил способ передачи многоразрядного сосредоточенного синхросигнала. Построению систем цикловой синхронизации с использованием передачи сосредоточенного синхросигнала и будет уделено основное внимание.
Рисунок 1.38. Способы передачи циклового синхросигнала.
Система цикловой синхронизации предоставляет, собой совокупность устройств, обеспечивающих синхронную работу соответствующих узлов (разрядных и канальных распределителей) ГО приемной и передающей станций. На передающей станции находится устройство формирования и ввода синхрогруппы в групповой цифровой сигнал. Это устройство достаточно просто реализуется и рассматривается при разборе конкретных систем передачи. На приемной станции находится приемник синхросигнала, обеспечивающий установку синхронизма после включения, аппаратуры в работу, контроль за состоянием синхронизма в рабочем режиме, обнаружение сбоя синхронизма и его восстановление. Рассматривая принцип построения приемника синхросигнала, схема которого показана на рисунке 1.39, можно выделить следующие основные узлы: опознаватель, анализатор, решающее устройство.
Рисунок 1.39. Схема приемника синхросигнала.
Опознаватель синхросигнала предназначен для выделения из группового ИКМ сигнала кодовых комбинаций, совпадающих по структуре с синхросигналом. Анализатор определяет соответствие момента времени прихода истинной синхрогруппы и контрольного сигнала с генераторного оборудования. Решающее устройство определяет состояние синхронизма, момент выхода из синхронизма, управляет работой соответствующих узлов ГО в режиме поиска синхронизма.
Рисунок 1.40. График алгоритма поиска синхросигнала.
Алгоритм поиска синхросигнала при нарушении синхронизма показан на рисунке 1.40. Опознаватель, сдвигая каждый раз момент регистрации на один такт, будет пробовать поступающие комбинации группового сигнала на их соответствие синхрогруппе. Таким образом, если за период цикла будет отсутствовать комбинация, похожая на синхрогруппу, а это маловероятно, синхросигнал будет найден в течение одного цикла или быстрее. Для подтверждения правильности выделения синхросигнала следующая проверка наличия синхросигнала будет ровно через цикл. Приемник синхронизации с таким принципом работы называется приемником со скользящим поиском и одноразрядным сдвигом. Развернутая структурная схема такого приемника синхросигнала показана на рисунке 1.41. На схеме штриховой линией выделены опознаватель, анализатор, решающее устройство, генераторное оборудование приема.
Рисунок 1.41. Схема приемника синхросигнала.
Опознаватель синхросигнала может быть построен как регистр сдвига и дешифратор — многовходовая схема совпадения И1. Анализатор содержит элементы НЕТ и И2. Появление импульса на выходе И2 означает совпадение по времени синхросигнала и контрольного импульса от ГОпр. Появление импульса на выходе схемы НЕТ означает отсутствие синхросигнала в момент появления контрольного импульса от ГОпр. Решающее устройство содержит накопитель по выходу из синхронизма, накопитель по входу в синхронизм, схему И3. Накопители по входу и выходу из синхронизма выполнены по схеме счетчика со сбросом. Накопитель по выходу из синхронизма необходим для исключения ложного нарушения синхронизма, когда в линейном тракте произошло изменение структуры синхросигнала. Обычно накопитель по выходу из синхросигнала содержит четыре - шесть разрядов (на рисунке 1.41накопитель содержит четыре разряда). Это обеспечивает помехозащищенность приемника синхросигнала от искажений синхрогруппы в линейном тракте пли по другим причинам. Накопитель по входу в синхронизм обеспечивает защиту приемника синхросигнала от ложного синхронизма в режиме поиска синхрогруппы, когда на вход опознавателя поступают случайные комбинации группового сигнала, совпадающие с синхросигналом. Обычно накопитель по входу в синхронизм содержит два - три разряда (на рисунке 1.41 накопитель содержит три разряда). Управление работой ГО производится схемой И3, которая в режиме поиска синхронизации при поступлении синхросигнала установит в начальное положение разрядный и канальный распределители ГО, определяя тем самым начало их работы. На выходе схемы И4 формируется контрольный импульс синхронизма от ГОпр. Появление этого импульса по времени должно произойти в определенный канальный интервал, определенный разрядный интервал этого канального интервала, в соответствии с тактовой частотой. Для этого используется схема И с тремя входами. Рассмотрим работу схемы приемника синхросигнала. В режиме синхронизма накопитель по входу в синхронизм заполнен, а накопитель по выходу из синхронизма пустой. Синхросигнал и контрольный сигнал от ГОпр одновременно поступающие на схему И2 держат накопитель по входу в синхронизм заполненным. Случайные кодовые комбинации группового сигнала, аналогичные по структуре с синхрогруппой, не совпадают по времени с контрольным сигналом от ГОпр, и не будут влиять на работу приемника синхросигнала в режиме синхронизма. При отсутствии синхросигнала из-за воздействия помех или других причин контрольный сигнал от ГОпр пройдет через схему НЕТ на вход накопителя по выходу из синхронизма. Если эти нарушения кратковременные (один - три цикла подряд для данной схемы), то следующий синхросигнал, совпадающий с сигналом от ГОпр, запишет 1 в накопитесь по входу в синхронизм. Так как накопитель по входу в синхронизм заполнен, это приведет к установке в нулевое состояние первых трех разрядов накопителя по выходу из синхронизма. Таким образом, кратковременные искажения синхросигнала не нарушат работуГО. При длительном нарушении синхронизма (синхросигнал отсутствует четыре цикла подряд) накопитель по выходу из синхронизмa будет заполнен, при этом на его выходе появится 1, что позволит начать поиск синхронизма. Теперь первый же импульс от опознавателя при появлении синхросигнала пройдет через схему И3 и установит 0 в последнем разряде накопителя по выходу из синхронизма, во всех разрядах накопителя по входу в синхронизм, а также установит в начальное положение разрядный и канальный распределители ГОпр. Следующее опознавание синхросигнала будет произведено ровно через цикл. Если синхросигнал выделен верно, то через цикл произойдет совпадение очередного синхросигнала и контрольного сигнала от ГОпр. В данном случае в накопитель по входу в синхронизм поступает 1. Когда это произойдет 3 раза подряд, накопитель по входу в синхронизм заполнится и установит 0 в первых трех разрядах накопителя по выходу из синхронизма (в четвертом разряде 0 уже установлен сигналом со схемы И3). Трехкратное совпадение синхросигнала и контрольного сигнала от ГОпр подтверждает установление синхронного режима работы. Возможно, но маловероятно, что в режиме поиска будет выделена опознавателем случайная кодовая комбинация, совпадающая с синхросигналом. В этом случае сигнал от опознавателя пройдет схему И3 и также установит в начальное положение разрядный и канальный делители. Следующее опознавание синхросигнала произойдет через цикл. Так как кодовые комбинации группового сигнала носят случайный характер, то через цикл синхросигнал выделен не будет. В накопитель по выходу из синхронизма поступит 1, а он уже заполнен, и опять начнется поиск синхросигнала. Процесс будет повторяться, пока не будет выделен настоящий синхросигнал. Разберем причины вызывающие сбой цикловой синхронизации. Основными из них являются выход из синхронизма по тактовой частоте, что приводит к изменению длительности цикла, так как в цикле появятся или пропадут один или несколько тактовых интервалов, и искажение символов синхросигнала в результате воздействия помех. Главным источником этих сбоев является линейный тракт. На временных диаграммах рисунок 1.42 показано возникновение сбоев синхронизации, вызванных различными причинами. На временной диаграмме 1 условно показан групповой сигнал, содержащий несколько циклов. Каждый цикл содержит 256 информационных символов. Синхросигнал имеет кодовую группу 111. На временных диаграммах 2 и 3 показаны импульсы от опознавателя и контрольные импульсы от ГОпр. Сбой синхронизма при искажении символа синхрогруппы показан на рисунке 1.42, а. Из временных диаграмм 2 и 3 видно, что цикловая синхронизация не нарушена и подстройку ГОпр производить не требуется. Сбой синхронизма при изменении длительности цикла показан на рисунке 1.42, б. В данном случае восстановление синхронизма возможно только при подстройке ГОпр.
Рисунок 1.42. Временные диаграммы возникновения сбоев синхронизации.
Из приведенных выше примеров можно сделать вывод, что в первом случае защиту приемника синхронизации от сбоя обеспечивает накопитель по выходу из синхронизма, тогда как во втором случае желательно начинать поиск синхросигнала по первому его пропаданию. В этом случае накопитель по выходу из синхронизма будет увеличивать время восстановления синхронизма. Время восстановления синхронизма является одним из основных параметров ЦСП. Допустимое время восстановления синхронизма определяется свойствами передаваемой информации.
При использовании цифровых систем для организации соединительных линий между АТС время восстановления синхронизма ограничивается несколькими миллисекундами. При передаче телефонных сообщении абонент практически не заметит перерыва связи в несколько десятков миллисекунд, однако при сбое синхронизации нарушается работа каналов передачи СУВ, что может привести к разъединению абонентов. Допустимое время пропадания каналов передачи СУВ, которое не отражается на работе приборов АТС и определяет допустимое время восстановления синхронизма, обычно составляет около 2 мс. Для ЦСП более высокого порядка это время очень ограничено. Графически время восстановления синхронизма tв показано на рисунке 1.43. Оно состоит из времени накопления по выходу из синхронизма tн.вых, времени поиска синхросигнала tп, времени накопления по входу в синхронизм tн.вх.

Рисунок 1.43. График времени восстановления синхронизма.
Недостатки рассмотренного способа построения приемника циклового синхросигнала определяются тем, что значение емкости накопителей по выходу из синхронизма и по входу в синхронизм фиксированы, а поиск синхронизации начинается только после времени накопления по выходу из синхронизма. Уменьшение времени восстановления синхронизма за счет сокращения времени накопления ведет к резкому уменьшению помехоустойчивости систем цикловой синхронизации. Это можно компенсировать увеличением разрядов в синхросигнале, но увеличение разрядов в синхросигнале ограничивается возможностями построения цикла передачи и применением специальных адаптивных приемников синхросигнала.
4. Линейный тракт, линейные коды
4.1. Цифровой линейный тракт (ЦЛТ)
Рассмотренное в предыдущих главах аналого-цифровое оборудование обеспечивает формирование цифрового двоичного сигнала, состоящего из импульсов и пробелов (единиц и нулей). Этот сигнал должен быть передан по ЦЛТ на противоположную оконечную станцию системы передачи, при этом должна быть обеспечена необходимая достоверность передачи.
Цифровой линейный тракт как тракт системы передачи должен содержать среду распространения цифрового сигнала и устройства, обеспечивающие требуемое качество передачи. В отличие от аналогового сигнала, используемого в системах с ЧРК и имеющего СЛОЖНУЮ форму, полное восстановление которой в промежуточных пунктах невозможно, цифровой сигнал в большинстве случаев достаточно прост по форме: импульс определенной амплитуды и длительности, и в промежуточных пунктах, возможно его полное восстановление (регенерация). Поэтому промежуточные ПУНКТЫ цифрового линейного тракта носят название регенерационных. Структурная схема ЦЛТ приведена на рисунке 1.44.
Оборудование окончания линейного тракта (ОЛТ) предназначено для формирования линейного цифрового сигнала на передаче и его регенерации на приеме. Регенерационные пункты (РП) обеспечивают регенерацию цифрового сигнала на промежуточных участках линейного тракта. Особенности построения ЦЛТ различных систем передачи связаны с физическими свойствами сред распространения цифрового сигнала (СРЦС), определяющими степень искажения формы сигнала помехозащищенность и, как следствие этого, верность передачи цифровой информации. Учитывая это, рассмотрим свойства основных СРЦС, их влияние на сигнал и предъявляемые к средам и сигналам требования, обеспечивающие получение необходимой верности передачи.
Рисунок 1.44. Цифровой линейный тракт
Одной из наиболее широко используемых сред для передачи цифровых сигналов является электрический кабель (как симметричный, так и коаксиальный). Рассмотрим влияние характеристик кабеля на передачу цифровых сигналов.
Затухание кабельной цепи с увеличением частоты растет, что неизбежно приводит к ограничению полосы частот цифрового сигнала сверху. Такое же воздействие оказывают на сигнал различные элементы входных схем регенератора (трансформаторы, усилители).
На рисунке 1.45 а показана последовательность двоичных импульсов на входе и выходе цепи при ограничении сверху полосы пропускания.
При поступлении импульса на вход участка кабельной цепи возникающие в этой цепи переходные процессы приводят к завалу фронта импульса и затягиванию спада при одновременном снижении амплитуды импульса. Причем, чем длиннее участок цепи, тем меньше величина импульсного отклика на его выходе и тем резче выражены явления завала фронта и затягивания спада.
При значительном ограничении полосы частот цифрового сигнала переходные процессы, возникающие в цепи кабеля при прохождении через нее каждого импульса, не успевают закончиться к моменту прихода следующего импульса или пробела. Это приводит к наложению импульсов, особенно сильно ощущаемому для соседних символов цифрового сигнала. Явление наложения символов цифрового сигнала за счет расширения их длительности получило название межсимвольной интерференции.
Межсимвольная интерференция приводит как к изменениям амплитуды, так и временным сдвигам символов. Вследствие межсимвольной интерференции на соседнем тактовом интервале импульс или пробел получает случайное приращение Δuпр. Если при отсутствии интерференции допустимая амплитуда помехи Uп, то при наложении символов ее значение уменьшается на Δuпр. Сдвиг фронта импульса Δт также приводит к искажению формы символа.
В линейных трактах, организованных на цепях симметричных кабелей, присутствуют согласующие трансформаторы и усилители, ограничивающие полосу частот цифрового сигнала снизу за счет подавления постоянной и низкочастотных составляющих спектра. Влияние ограничения полосы частот цифрового сигнала снизу показано на рисунке 1.45. б.
Рисунок 1.45. Влияние ограничения полосы частот на форму двоичного цифрового сигнала в линейном тракте.
Ослабление низкочастотных составляющих приводит к появлению выбросов, полярность которых противоположна полярности символа цифрового сигнала, причем спад выброса затягивается на последующие тактовые интервалы, вызывая межсимвольную интерференцию, снижающую амплитуду импульсов. Снижение амплитуды импульсов при возможной амплитуде помехи Uп снижает возможность регистрации импульсов на фоне помех. Следовательно, ограничение полосы частот вызывает искажение цифрового сигнала, что всегда снижает помехоустойчивость. Цифровой сигнал в электрическом кабеле подвергается воздействию помех. Рассмотрим характерные помехи и их влияние на цифровые сигналы.
Основным видом помех в ЦЛТ, построенных на симметричном кабеле, являются переходные помехи с других трактов этого кабеля. Влияние помехи на сигнал зависит от способа организации передачи. При однокабельной передаче преобладают переходные помехи на ближнем конце регенерационного участка, при двухкабельной - переходные помехи на дальнем конце. Переходная помеха на ближнем конце не зависит от длины регенерационного участка и в большинстве случаев превышает переходную помеху на дальнем конце. Величина переходной помехи на ближнем конце определяется уровнем сигнала на передаче, переходным затуханием между парами кабеля на ближнем конце А0 и спектрами влияющего и подверженного влиянию сигналов.
Увеличение скорости передачи цифрового сигнала приводит к уменьшению длительности импульсов и расширению полосы частот. Это, в свою очередь, снижает переходное затухание и соответственно увеличивает помехи. В этом случае уменьшается защищенность на ближнем конце Аз0. С целью сохранения величины защищенности Аз0 в допустимых пределах приходится либо соответственно уменьшать длину регенерационных участков, либо использовать двухкабельную систему организации передачи.
Кроме переходных помех для симметричных кабелей характерны помехи от отраженных сигналов. Отражения сигналов возникают в тех точках кабельной пары, где происходит скачкообразное изменение волнового сопротивления цепи - это прежде всего стыки строительных длин и участки включения газонепроницаемых муфт. Отражения приводят к возникновению паразитных цифровых потоков, опережающих основной сигнал или отстающих от него.
При одновременном использовании пар симметричного кабеля для организации цифровой передачи и коммутируемой низкочастотной связи на регенерационных участках, прилегающих к коммутационной станции, возникают импульсные помехи. Помехи создаются коммутационными приборами. Мощность этих помех на прилегающих к станции регенерационных участках значительно превышает мощность остальных помех, из-за чего приходится укорачивать пристанционные участки.
Характерной особенностью коаксиальных кабелей, используемых для организации высокоскоростных цифровых трактов, является рост переходного затухания при увеличении частоты. Переходное затухание типовых коаксиальных кабелей уже на частоте 1 МГц не менее 120 дБ, что позволяет не учитывать переходные помехи при рассмотрении процессов передачи по ним сигналов.
Основным видом помех в коаксиальных цифровых трактах являются тепловые помехи, вызванные хаотическим тепловым движением носителей тока в кабельных цепях и входных каскадах регенераторов. Защищенность от тепловых шумов всецело определяется скоростью передачи цифрового сигнала и длиной регенерационного участка (эти параметры определяют затухание участка). Менее значительны помехи от отражений, которые в коаксиальных цепях возникают не только в точках стыка строительных длин, но и в точках технологической неоднородности структуры цепи.
В целом уровень помех в коаксиальных цепях намного ниже, чем в симметричных. При организации высокоскоростных цифровых трактов по симметричным кабелям необходимая защищенность не может быть обеспечена, поэтому при скоростях передачи свыше 8 Мбит/с цифровые линейные тракты строятся на базе коаксиальных кабелей.
4.2. Линейные коды ЦСП
Как уже отмечалось, по ЦЛТ должны передаваться сигналы, обеспечивающие минимальные уровни помех внутри сигнала и переходных помех между соседними трактами. Уровень и мешающее действие указанных помех зависят в общем случае как от ширины и формы энергетического спектра сигнала, так и от ширины и формы амплитудно-частотной характеристики (АЧХ) тракта.
Следовательно, вопрос выбора цифрового сигнала, обеспечивающего необходимую помехозащищенность, сводится к подбору сигнала, спектр которого удовлетворяет определенным требованиям. Первое требование: энергетический спектр сигнала должен ограничиваться снизу и сверху, быть достаточно узким, располагаться на сравнительно низких частотах и не содержать постоянной составляющей.
Ограниченный спектр сигнала позволяет уменьшить искажения при прохождении сигнала через тракт, так как в спектре сигнала будут подавляться составляющие, имеющие небольшую мощность (известно, что чем больше мощность составляющей, тем сильнее искажение при ее подавлении). Сдвиг спектра в область более низких частот снижает уровень переходной помехи. Уменьшение ширины спектра сигнала позволяет сделать более узкой полосу пропускания входных цепей регенератора, уменьшив тем самым ширину полосы и мощность помех, проникающих в решающее устройство.
Было установлено, что качество тактовой синхронизации регенератора в большой степени зависит от состава энергетического спектра цифрового сигнала. Известно, что системы тактовой синхронизации требуют наличия в спектре дискретной составляющей с частотой fт. Если тактовая частота в спектре цифрового сигнала отсутствует, то организация тактовой синхронизации сильно затруднена. Поэтому второе требование к спектру цифрового сигнала: в составе спектра должна быть составляющая с частотой fт.
Как известно из теории передачи сигналов, наличие информационной избыточности в кодовых комбинациях позволяет выявлять в них ошибки. Следовательно, применив линейный код, содержащий избыточность, можно решать вопросы контроля качества передачи в линейном тракте без перерыва связи. Отсюда третье требование к цифровому линейному сигналу: он должен быть представлен в коде содержащем информационную избыточность.
Рассмотрим, насколько известные двоичные коды удовлетворяют представленным выше трем требованиям.
Сигнал на выходе АЦП в безызбыточном двоичном коде может быть представлен в виде случайной последовательности однополярных импульсов (рисунок 1.46. а) со скважностью q=T/tи>1 (как правило, q=2). Такой сигнал называют, двоичным, или бинарным. Энергетический спектр двоичного сигнала содержит сплошные и линейчатые составляющие (рисунок 1.46. б).
Рисунок 1.46. Двоичные цифровые сигналы и их энергетические спектры:
а -двоичный сигнал, со скважностью q=2;
б - энергетический спектр сигнала с q=2;
в -двоичный цифровой сигнал с импульсами, затянутыми на тактовый интервал (q=1);
г - спектр сигнала q=1
Анализ спектральной диаграммы этого сигнала показывает, что амплитуды постоянной составляющей и НЧ составляющих спектра выше, чем у ВЧ составляющих. Ширина первого лепестка спектра велика - 2fт.
Проходя через тракт с большим числом линейных трансформаторов, подавляющие самые мощные составляющие спектра, сигнал сильно искажается и его регенерация становится затруднительной. Следовательно, такой сигнал не удовлетворяет первому требованию, предъявляемому к цифровому линейному сигналу. Не удовлетворяет он и третьему требованию. Наличие fт в спектре сигнала не может служить основанием для его применения, так как не выполняется первое требование, являющееся самым важным.
В линейных трактах сельских цифровых систем передачи ИКМ-12М и ИКМ-15 используются двоичные сигналы со скважностью импульсов q=1, так называемые сигналы с импульсами, «затянутыми на тактовый интервал» (рисунок 1.46, в). Энергетический спектр такого сигнала (рисунок 1.46, г) не содержит дискретных составляющих, его непрерывная составляющая концентрируется в области низких частот, имеется мощная постоянная составляющая. Этот сигнал не удовлетворяет основным требованиям, предъявляемым к форме и составу спектра линейного цифрового сигнала. В то же время меньшая ширина спектра, чем у сигнала с q=2, в сочетании со специальным методом регенерации позволяют добиться помехоустойчивости регенераторов, сравнимой с помехоустойчивостью при использовании квазитроичных сигналов, которые будут рассмотрены ниже. При этом регенератор двоичного сигнала с импульсами, «затянутыми на тактовый интервал», будет проще и экономичнее регенератора квазитроичного сигнала.
Постоянная составляющая в энергетическом спектре однополярной случайной импульсной последовательности определяется энергией импульсов, поступивших на вход приемного устройства за определенный отрезок времени. Если вместо однополярной последовательности импульсов использовать последовательность импульсов чередующейся полярности, то за определенный промежуток времени суммарная энергия положительных и отрицательных импульсов на накопителе приемного устройства будет равна нулю. Эта идея была использована при формировании основного вида линейного цифрового сигнала, получившего название сигнала с чередованием полярности импульсов ЧПИ.
На рисунке 1.47.а, представлена двоичная кодовая комбинация, а на рисунке 1.47.б, полученная из нее комбинация в коде ЧПИ. Видно, что символы, используемые в комбинации кода ЧПИ, могут иметь три уровня: -1; 0; +1. В то же время количество информации в кодовой комбинации ЧПИ такое же, как и в двоичном коде, так как она получена из двоичной комбинации. Количество информации в кодовой комбинации, состоящей из элементов трех уровней, больше, чем в двоичной. Избыточность информации при использовании кода ЧПИ позволяет контролировать наличие ошибок в линейном тракте.
Рисунок 1.47. Квазитроичный цифровой код с чередованием полярности импульсов ЧПИ и его энергетический спектр
Энергетический спектр случайной импульсной последовательности (рисунок 1.47, в) концентрируется в узкой области вблизи частоты 0,5fт, называемой полутактовой. В спектре сигнала отсутствует составляющая с частотой fт, что затрудняет построение систем тактовой синхронизации. Тем не менее отсутствие постоянной составляющей и концентрация спектра в области частот ниже fт позволяют при одинаковых значениях тактовой частоты получить для сигнала с ЧПИ меньшие, чем для двоичного, величины межсимвольных искажений и переходной помехи. Это и определило широкое использование сигнала с ЧПИ в низкоскоростных и среднескоростных ЦСП.
5. Регенерация сигналов
5.1. Регенерация формы цифрового сигнала
Проходя через среду распространения, цифровой сигнал ослабляется и подвергается искажению и воздействию помех, что приводит к изменению формы и длительности импульсов, изменению случайным образом временных интервалов между импульсами, уменьшению амплитуды импульсов. Задача регенитора - восстановить амплитуду, форму, длительность каждого импульса цифрового сигнала, а также величину временных интервалов между соседними символами.
В кабельных ЦСП линейный сигнал чаще всего передается в виде комбинаций импульсов поостоянного тока и пробелов что упрощает реализацию регенераторов. В то же время регенераторы кабельных систем являются наиболее распространенным элементом современных цифровых сетей. Исходя из сказанного выше рассмотрим регенерацию цифрового сигнала, представляющего собой комбинацию импульсов и пробелов (единиц и нулей). Структура регенератора представлена на рисунке 1.48. Искаженный цифровой сигнал из кабельной цепи поступает на усилитель-корректор (УК), обеспечивающий частичную или полную коррекцию формы импульсов, и регистрируется решающим устройством (РУ). Решающее устройство представляет собой пороговую схему, которая срабатывает, если уровень сигнала на его входе превышает пороговый уровень РУ, и не срабатывает, если уровень входного сигнала меньше уровня порога.
Рисунок 1.48. Принцип регенерации цифрового сигнала
Пороговое напряжение может подаваться извне или вырабатываться в схеме РУ. При поступлении импульса на выходе РУ появляется управляющий сигнал, а в случае 0 (.пробела) состояние РУ не изменяется. Формирующее устройство (ФУ) обеспечивает формирование по сигналам РУ импульсов с принятыми для конкретной системы стандартными параметрами.
В приведенной выше схеме, характерной для современных регенераторов, регистрация входящего сигнала и принятие решения о его значении осуществляются по каждому символу в отдельности (возможно принятие решений по всей кодовой комбинации или по циклу, так называемый «прием в целом»), что значительно упрощает реализацию схемы регенератора. Однако при этом требуется введение устройства тактовой синхронизации (УТС), которое должно обеспечить принятие решений на определенных временных интервалах. Эти интервалы выбираются в пределах участков тактового интервала, на которых принимаемый импульс имеет минимальные искажения, так как выбор момента регистрации в менее искаженной части импульса гарантирует верность принятия решения РУ. Верность принимаемых РУ решений зависит, в первую очередь, от способа обнаружения двоичного сигнала и качества работы УТС. При безошибочной работе РУ каждому входному импульсу соответствует выходной, а каждому «пробелу» на входе - «пробел» на выходе. Однако из-за присутствия на входе РУ различных помех, несовершенства устройства тактовой синхронизации и других причин в процессе регенерации возможны ошибки, выражающиеся в преобразовании 1 на входе регенератора в 0 на выходе и наоборот входного 0 в выходную 1.
5.2. Построение регенераторов
Регенераторы современных ЦСП классифицируются по методу регистрации импульсов, виду тактовой синхронизации, методам получения колебания тактовой частоты и использования синхросигнала в процессе регенерации импульсов.
По методам регистрации импульсов различают регенераторы с однократным и многократным стробированием импульса цифрового сигнала. Практическое применение благодаря достаточной простоте реализации узлов регистрации нашли регенераторы с однократным стробированием, в которых на протяжении одного символа цифрового сигнала берется один отсчет и с помощью РУ устанавливается наличие 1 или 0 на входе регенератора.
По видам синхронизации различают регенераторы с внешней и внутренней синхронизацией.
При использовании внешней синхронизации цифровой сигнал в оконечном оборудовании линейного тракта объединяют с синхросигналом, получаемым от специальных УТС. При внешней синхронизации возможна также передача сигналов тактовой синхронизации по отдельному тракту. Оба способа внешней синхронизации требуют значительного усложнения оборудования системы и неэкономичны. Передача синхросигнала по отдельному тракту связана с необходимостью выравнивания группового времени распространения для информационных и синхротрактов. Совместная передача цифрового и синхросигналов кроме усложнения оборудования передачи приводит к усложнению схем регенераторов из-за необходимости осуществления процессов выделения тактовой частоты, подавления на входе регенератора составляющих цифрового сигнала, близких к тактовой частоте, объединения на выходе регенератора цифрового сигнала и сигнала тактовой синхронизации.
Исходя из этого на практике чаще всего используются регенераторы с внутренней синхронизацией, в которых тактовая синхронизирующая частота выделяется из цифрового сигнала. В зависимости от способа получения тактовой частоты регенераторы с внутренней синхронизацией подразделяются на регенераторы с пассивной и активной фильтрацией тактовой частоты.
При активной фильтрации для формирования колебания тактовой частоты используются генераторы с фазовой автоподстройкой либо генераторы, синхронизируемые входящим цифровым сигналом. При пассивной фильтрации для выделения колебания тактовой частоты используются избирательные цепи типа, резонансных контуров, многоконтурных схем, фильтров.
Типовая структура УТС регенератора с внутренней синхронизацией и пассивной фильтрацией тактовой частоты представлена на рисунке 1.49.
Рисунок 1.49. Структурная схема УТС
Устройство нелинейного преобразования (НП) входного сигнала позволяет получить в спектре преобразованного сигнала составляющую с частотой, равной тактовой fт, которая может быть выделена устройством фильтрации тактовой частоты (ФТЧ) и направлена в формирователь стробирующих импульсов (ФСИ). Формирователь стробирующих импульсов формирует импульсы с частотой следования, равной выделенной fт, определяющей промежутки времени стробирования для РУ и управляющей работой формирующего устройства (ФУ).
При активной фильтрации структура УТС несколько видоизменяется (рисунок 1.50.). Ток тактовой частоты с выхода ФТЧ поступает на ФД. на второй вход которого подается тактовый сигнал от местного генератора тактовой частоты ГТЧ. Фазовый детектор вырабатывает управляющее напряжение Uy, пропорциональное разности фаз сигналов на входах ФД, которое поступает на вход цепи фазовой автоподстройки частоты ФАПЧ. Изменение параметров цепи ФАПЧ приводит к изменению частоты сигнала ГТЧ, при этом меняется разность фаз сигналов на входах ФД и напряжение Uy. Процесс продолжается до тех пор, пока частоты сигналов ГТЧ и ФТЧ не выравниваются, при этом Uy =0.
Рисунок 1.50. Структурная схема УТС
В регенераторах с внутренней синхронизацией синхросигнал может быть получен как из входной импульсной последовательности регенератора, так и из выходного сигнала регенератора. В первом случае регенератор носит название регенератора прямого действия (рисунок 1.51 а), во втором обратного действия (рисунок 1.51 б).
Рисунок 1.51. Варианты построения регенераторов однополярных цифровых сигналов
В связи с тем, что устойчивость регенератора обратного действия ниже устойчивости регенератора прямого действия из-за наличия контура обратной связи, на практике чаще используют регенераторы прямого действия.
Известны три способа использования сигналов тактовой синхронизации в процессе регенерации импульсов цифрового сигнала:
- перемножение регенерируемого сигнала с сигналом синхронизации с помощью схем логического умножения;
- сложение регенерируемого сигнала с сигналом синхронизации;
- перемножение сигналов с последующим сложением полученного результата с сигналом синхронизации или линейным сигналом.
Наибольшее распространение получили регенераторы с РУ, осуществляющими перемножение регенерируемого сигнала с сигналом тактовой синхронизации. В таких регенераторах РУ осуществляет стробирование сигнала на его входе в моменты времени, определяемые УТС, в этом случае схема регистрации позволяет полностью восстановить временные интервалы между символами цифрового сигнала, так как они полностью определены моментами появления стробирующих импульсов на выходах УТС. Длительность стробирующего импульса обычно во много раз меньше длительности регистрируемого символа цифрового сигнала.
В высокоскоростных ЦСП выработка стробирующих импульсов в регенераторах сильно затруднена, так как их длительность оказывается значительно меньше длительности очень коротких элементарных символов цифрового сигнала. В данном случае применяют регистрацию с частичным восстановлением временных соотношений цифрового сигнала. При этом в РУ осуществляется сложение входящего цифрового сигнала с сигналом тактовой частоты, вырабатываемым УТС. В дальнейшем из напряжения суммарного сигнала вычитается пороговое напряжение, что позволяет определить значение регенерируемого символа. В некоторых случаях возможно применение комбинации двух рассмотренных выше методов.
Рассмотренные выше структуры регенераторов предназначены для восстановления однополярных цифровых сигналов. Для восстановления формы двухполярных сигналов регенератором должно быть предусмотрено два канала регенерации - отдельно для положительных и отрицательных импульсов. Разделение импульсов в соответствии с полярностью наиболее просто реализуется с помощью дифференциальных трансформаторов.
5.3. Параметры регенераторов
Основным параметром регенератора является коэффициент ошибок Кош, определяемый как отношение числа ошибочно регенерированных символов Nош к общему числу символов No [3]:
 (1.24)
(1.24)
В каждой конкретной системе передачи для номинальной длины регенерационного участка задается минимально допустимое значение Кош.
В некоторых случаях в качестве основного параметра используется значение помехоустойчивости. Под помехоустойчивостью регенератора понимают то минимальное значение защищенности Аз min на входе регенератора, при которой обеспечивается заданный Кош. Помехоустойчивость оценивается с учетом ухудшающих работу регенератора факторов-неточности коррекции, нестабильности тактовой частоты, наличия зоны неопределенного решения РУ.
Для оценки качества коррекции импульсов УК регенератора и возможности достоверной регистрации импульса цифрового сигнала используются так называемые глаз-диаграммы. Глаз-диаграмма - это график или картинка на экране осциллографа, состоящая из системы наложенных друг на друга всех возможных вариантов цифрового сигнала в интервале времени, равном двум тактовым интервалам.
На рисунке 1.52 представлен вариант глаз-диаграммы. Точка Р графически фиксирует опознавание импульса в центре тактового интервала на уровне, равном половине его амплитуды. Разность devUр между уровнями регистрируемого импульса и соседнего, создающего максимальную по величине межсимвольную помеху, называется раскрывом глаз-диаграммы. Чем больше раскрыв, тем больше допустимый уровень аддитивной помехи, при которой будет принято правильное решение. Следовательно, увеличение раскрыва снижает коэффициент ошибок регенератора, а его уменьшение приводит к росту Кош. Отметим, что раскрыв уменьшается при смещении момента регистрации от центра импульса (точка Р смещается влево или вправо).
Рисунок 1.52. Характеристика для оценки помехоустойчивости регенераторов (глаз-диаграмма).
6. Объединение цифровых потоков
6.1. Стандартизация цифровых систем передачи
Для рационального построения ЦСП необходимо, чтобы число каналов ТЧ, на которые они рассчитываются, было кратно минимальному стандартному числу. Это дает возможность использовать стандартное каналообразующее оборудование. Аналогично строятся и аналоговые системы передачи с ЧРК, где стандартные первичные, вторичные, третичные группы каналов позволяют применять унифицированное индивидуальное и групповое оборудование. Цифровые системы передачи также строятся согласно определенной иерархии. При этом учитываются следующие требования:
1) возможность передачи всех видов аналоговых и дискретных сигналов;
2) обеспечение как синхронного, так и асинхронного объединения, разделения и транзита цифровых потоков и сигналов в цифровом виде;
3) выбор стандартизированных скоростей передачи цифровых потоков с учетом возможности использования цифровых и аналоговых систем передачи. Плезиохронная цифровая иерархия ПЦИ/PDH определена в рекомендации G.702 ITU-T и включает в себя несколько уровней с разными скоростями передачи (таблица 1.2)
Таблица 1.2. Общее характеристики ОЦК и сетевых трактов ПЦИ/PDH.
Иерархия ПЦИ/PDH строится на основе основного цифрового канала (ОЦК 64 кбит/с), которое обозначается Е0. Поток Е1 получается мультиплексированием 32 ОЦК в один канал первичной группы со скоростью передачи 2048 кбит/с. Каналы высших уровней иерархии ПЦИ/PDH формируются по единой схеме: 4 потока Е1 мультиплексируются в поток Е2 со скоростью передачи 8448 кбит/с, 4 потока Е2 в Е3 с 34368 кбит/с, 4 потока Е3 в Е4 с 139264 кбит/с. Процессе мультиплексирования осуществляется выравнивание скоростей потоков методом подстановки служебных битов (процедура стаффинга). В результате для выделения канала первичной группы Е1 из потоков высших уровней иерархией требуется пошаговое мультиплексирование и демультиплексирование (рисунок 1.53).
Рисунок 1.53. Пошаговое мультиплексирование в ПЦИ/PDH.
Структура систем передачи ПЦИ/PDH, включат три уровня эталонной модели ВОС/OSI: физический, канальный и сетевой. Физический уровень описывает электрический интерфейс, а также параметры сигналов ПЦИ/PDH. Канальный уровень описывает процедуры мультиплексирования и демультиплексирования каналов разных уровней иерархии, цикловую структуру потоков, встроенные процедуры контроля ошибок и т.д. Сетевой уровень описывает процедуры управления каналами, а также контроль параметров ошибок на сетевом уровне.
Первичная ЦСП ИКМ-30 предназначена для городских и сельских сетей и обеспечивает организацию 30 каналов ТЧ. Скорость передачи группового сигнала 2048 кбит/с. Система ИКМ-30 работает по кабелям типов Т, ТП и может быть использована в качестве каналообразующей для ЦСП более высокого порядка.
Вторичная ЦСП ИКМ-120 предназначена для местных и зоновых сетей и обеспечивает организацию 120 каналов ТЧ. Предусмотрена возможность совместной передачи стандартной вторичной группы (исходный спектр 312...552 кГц) в цифровом виде и одного первичного цифрового потока. Скорость группового цифрового потока 8448 кбит/с. Цифровой поток организуется путем объединения четырех первичных цифровых потоков со скоростью 2048 кбит/с. Система передачи может работать по симметричным междугородным кабелям, волоконно-оптическим, радиорелейным и спутниковым линиям.
Третичная ЦСП ИКМ-480 предназначена для работы на зоновых и магистральных сетях связи и обеспечивает организацию 480 каналов ТЧ. Скорость группового цифрового потока 34368 кбит/с. Цифровой поток организуется путем объединения четырех вторичных цифровых потоков со скоростью 8448 кбит/с. Система передачи может работать по кабелю МКТ-4, волоконно-оптическим, радиорелейным и спутниковым линиям.
6.2. Временное объединение цифровых потоков
Объединение цифровых потоков происходит при формировании группового цифрового сигнала из цифровых потоков систем более низкого порядка, а также при объединении различных сигналов, передаваемых в цифровом виде, в единый цифровой поток.
При формировании группового цифрового сигнала возможны следующие способы объединения цифровых потоков: по символьный (поразрядный); по канальный (по кодовым группам каналов) и по системный (по циклам потоков объединяемых систем). На рисунке 1.54 показан принцип по символьного, а на рисунке 1.55 по канального объединения цифровых потоков. В обоих случаях объединяются четыре потока. При посимвольном объединении импульсы цифровых сигналов объединяемых систем укорачиваются и распределяются во времени так, чтобы в освободившихся интервалах могли разместиться вводимые импульсы других систем. При по канальном объединении цифровых потоков сужаются и распределяются во времени интервалы, отводимые для кодовых групп. Сигналы цикловой синхронизации необходимы для правильного распределения цифровых потоков на приемном конце. Объединение цифровых потоков по циклам аналогично по канальному объединению, только обрабатывается (сжимается) во времени и передается целиком цикл одного цифрового потока, а потом следующих.Наиболее простым и широко применяемым способом является способ посимвольного объединения.
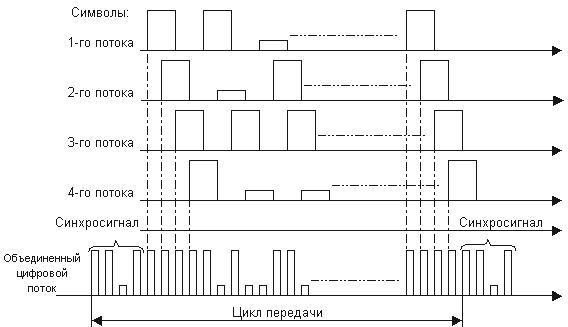
Рисунок 1.54. Формирование группового цифрового сигнала посимвольным способом объединения цифровых потоков.
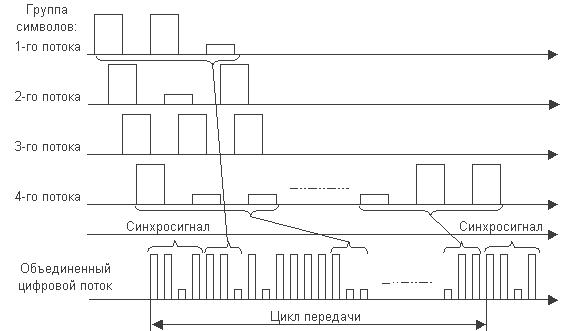
Рисунок 1.55. Формирование группового цифрового сигнала по канальным способом объединения цифровых потоков.
Объединение цифровых потоков осуществляется в оборудовании временного группообразования, принцип построения которого показан на рисунке 1.56. В состав оборудования входят: блоки цифрового сопряжения тракта передачи и приема (БЦСпер), (БЦСпр); устройства объединения (УО) в тракте передачи и разделения (УР) в тракте приема потоков; передатчик и приемник синхросигнала (Пер. СС), (Пр. СС); выделитель тактовой частоты (ВТЧ) линейного цифрового сигнала; генераторное оборудование (ГО) передающей и приемной станции.
Рисунок 1.56. Принцип построения оборудования группообразования.
Сигналы с выходов БЦСпер совместно с сигналами цикловой синхронизации поступают на вход схемы объединения. Временной сдвиг между импульсными последовательностями на выходах БЦСпер обеспечивается управляющими импульсами с ГО. На приеме УР распределяет импульсы группового сигнала по своим БЦСпр, а также сигналы Пр. СС.
Генераторное оборудование систем передачи более низкого порядка может работать либо независимо от оборудования объединения и разделения цифровых потоков, либо должна обеспечиваться синхронизация общим задающим генератором. В зависимости от этого объединение цифровых потоков будет асинхронным или синхронным.
При синхронном объединении цифровых потоков скорость записи в БЦС и скорость считывания этой информации из БЦС будут постоянными и кратными, так как вырабатываются одним и тем же ГО. В данном случае между командами записи и считывания должен быть установлен требуемый временной сдвиг, чтобы считывание информации происходило после ее поступления в БЦСпер.
При асинхронном объединении цифровых потоков, когда ГО устройств объединения цифровых потоков и ГО устройств формирования цифровых потоков низшего порядка работают независимо, возможно некоторое расхождение между скоростями записи и считывания. Для согласования этих скоростей необходимо принимать соответствующие меры.
При объединении цифровых потоков производится запись информационных символов в запоминающее устройство ЗУ с частотой fз и последующее их считывание с частотой fсч.и. При синхронном объединении цифровых потоков fз= fсч.и. При асинхронном объединении цифровых потоков частоты записи и считывания могут изменяться в некоторых пределах и иметь значения
fз.н - ∆fз max ≤ fз ≤ fз.н + ∆fз max , (1.25)
fсч.и. н - ∆fсч.и. max ≤ fсч.и. ≤ fсч.и. н+ ∆fсч.и. max, (1.26)
где fз.н, fсч.и. н —номинальные значения частоты записи и считывания информационных символов; ∆fз max, ∆fсч.и. max —максимальное отклонение частот записи и считывания от номинального значения, вызванное нестабильностью работы ГО.
При таких ситуациях могут возникнуть моменты, когда fз. > fсч.и. и память ЗУ будет заполнена или когда fз. < fсч.и и память ЗУ будет пуста и в очередной момент считывать будет нечего. В обеих ситуациях передача цифрового потока будет происходить с искажениями, так как в первом случае часть информационных символов пропадает, а во втором - появляются дополнительные временные позиции, которые в исходном цифровом потоке отсутствуют. Чтобы избежать этих нарушений, требуется обеспечить согласование скоростей.
При fз. <
fсч.и производится положительное выравнивание скоростей: в считанную последовательность вводится дополнительный балластный тактовый интервал, который на приеме должен быть изъят из передаваемой последовательности информационных символов. Если fз. > fсч.и. производится отрицательное согласование скоростей; из считываемой последовательности изымается один тактовый интервал, информация которого передается по специальному временному каналу и на приеме вводится в передаваемый поток на свое место.
При асинхронном объединении цифровых потоков находят применение системы как с односторонним, так и двусторонним согласованием скоростей.
В системах с односторонним согласованием скоростей частота fсч.и выбирается заведомо большей или меньшей, чем fз. (в зависимости от положительного или отрицательного согласования скоростей). При этом в системах с положительным согласованием скоростей должно выполняться условие
fсч.и. н - ∆fсч.и. max > fз.н + ∆fз max.(1.27)
Тогда при согласовании скоростей в считанную последовательность вводится дополнительный неинформационный (балластный) тактовый интервал (запретом одного импульса считывания), который на приеме исключается из нее по соответствующей команде согласования скоростей.
В системах с отрицательным согласованием скоростей должно выполняться условие
fсч.и. н + ∆fсч.и. max < fз.н - ∆fз max. (1.28)
Тогда при согласовании скоростей в этих системах на передаче из информационной последовательности изымается один тактовый интервал (дополнительное считывание), который передается по дополнительному каналу и на приеме по команде согласования скоростей снова вводится в информационную последовательность.
В системах с двусторонним согласованием скоростей частота fсч.и. н выбирается равной fз.н. При этом должно выполняться условие
fсч.и. н ± ∆fсч.и. max = fз.н ± ∆fз max.(1.29)
В зависимости от знака разности частот fз. и fсч.и. при возникновении неоднородности необходимо либо вводить в считанную последовательность дополнительный тактовый интервал, либо изымать его и передавать по дополнительному каналу.
В реальной аппаратуре объединения потоков необходимо передавать еще служебные сигналы (цикловую синхрокомбинацию, команды согласования скоростей, импульсы служебной связи, аварийные сигналы и др.), поэтому частота считывания выбирается больше частоты записи:
fс.ч. = fсч.и. + fсл, (1.30)
где fсл —частота следования служебных импульсов. Таким образом, из-за расхождения частот записи и считывания цифровых потоков периоды между моментами записи и считывания будут отличаться на величину ∆t=Тз-Тсч, где Тз=1/fз - период записи информационных символов; Тсч=1/fсч - период их считывания.
На рисунке 1.57, а показан пример записи импульсной последовательности. Для упрощения реальный сигнал от источника информации, состоящий из 1 и 0, заменен сигналом, состоящим только из 1. При ∆t=0, когда fз = fсч или Тз-Тсч =0, считанная из ЗУ последовательность будет такой же. На рисунке 1.57, б показана последовательность считываемых импульсов, для которых fсч > fз (∆t>0), с конкретным значением отношения Тсч/Тз=13/16. Как видно ил рисунка, импульсы считывания опережают записанные импульсы и через некоторое время наступит момент, когда ячейки памяти будут свободны от информационных импульсов и появятся нулевые символы, которые называются временными сдвигами (рисунок 1.57, в). Интервалы времени между такими символами в последовательности считанных импульсов определяют период временных сдвигов.
Рисунок 1.57. Временные диаграммы поясняющие принцип возникновения временных сдвигов и неоднородностей.
Число информационных импульсов между соседними временными сдвигами будет R=П[Тсч/(Тз-Тсч)], где символ П означает округление до ближайшего целого. При синхронном объединении потоков отношение Тсч/(Тз-Тсч) есть целое число. Например, при Тсч/Тз = 12/16 символ П=3, т. е. временной сдвиг будет после каждых трех позиций передачи информации. Тогда в считанной последовательности импульсов интервалы между временными сдвигами будут постоянными. Такую последовательность импульсов называют однородной, так как временные сдвиги формируются на строго определенных позициях в цикле передачи и могут использоваться для передачи служебных сигналов. Частота следования последних постоянна, что позволяет выделить их на приеме. При асинхронном объединении цифровых потоков из-за нестабильности задающих генераторов, вырабатывающих тактовые частоты, отношение Тсч/(Тз-Тсч) - дробное число и его величина будет меняться во времени. В этом случае (рисунок 1.57, в) через определенное число временных сдвигов число импульсов между соседними временными сдвигами изменяется и появляется неоднородность. Период возникновения подобных неоднородностей определяется разностью
[Тсч/(Тз-Тсч)] - П [Тсч/(Тз-Тсч)]=±1 (1.31)
Для приведенного выше примера Тсч/Тз=13/16. При этом [Тсч/(Тз-Тсч)] - П [Тсч/(Тз-Тсч)]=13/3 - 4=1/3, следовательно, в данном случае неоднородности возникают в каждом третьем временном сдвиге и в интервале между временным сдвигом будет не четыре, а пять считанных импульсов. В дальнейшем цикл временных сдвигов повторится. При появлении неоднородностей требуется обеспечить согласование скоростей передачи символов путем коррекции соответствующих моментов временных сдвигов. В рассмотренном случае можно уменьшить соотношение между частотами записи и считывания до 12/15. При этом временные сдвиги будут появляться после четырех считанных импульсов, но каждый 13-й импульс последовательности записи должен изыматься и передаваться по отдельному каналу (производится отрицательное согласование скоростей). Если, наоборот, соотношение между частотами записи и считывания увеличить до 15/18, то интервалы между временными сдвигами, содержащие четыре считанных импульса, надо увеличивать до пяти, вводя дополнительные тактовые интервалы (производится положительное согласование скоростей).
Для передачи команд согласования скоростей и информационного символа при отрицательном согласовании скоростей организуются дополнительные временные каналы на определенных позициях цикла передачи. Следовательно, согласование скоростей может производиться в строго определенный момент, обусловленный структурой цикла передачи объединенного цифрового потока. Передача КСС приводит к снижению эффективности работы системы передачи, так как необходимо повышать тактовую частоту передачи или уменьшать объем передачи полезной информации. Число КСС, а следовательно и объем дополнительной информации будут зависеть от частоты возникновения неоднородности, которая в основном зависит от стабильности работы генераторного оборудования. Учитывая достаточно высокую стабильность ГО, передаваемые команды согласования скоростей занимают 1...2% объема передаваемой информации.
6.3. Оборудование временного группообразования асинхронных цифровых потоков
Рассмотрим структурную схему оборудования временного группообразования с асинхронным сопряжением цифровых потоков, построенного по системе с двусторонним согласованием скоростей (рисунок 1.58). Оборудование передающей станции содержит блоки асинхронного сопряжения тракта передачи (БАСпер) для каждого из объединяемых цифровых потоков, а приемной станции - соответственно блоки асинхронного сопряжения тракта приема (БАСпр). На передающей станции цифровой поток от системы низшего порядка, например ИКМ-30, вводится в соответствующий БАСпер. Здесь цифровой поток записывается в запоминающее устройство (ЗУ). Запись осуществляется импульсной последовательностью тактовой частоты, выделяемой из входного потока выделителем тактовой частоты (ВТЧ). Записанный в ЗУ поток считывается импульсной последовательностью, поступающей от ГО передающей станции. Считанные цифровые потоки от всех БАСпер передаются в устройство объединения (УО), где объединяются в групповой цифровой поток.
Для контроля взаимного временного положения импульсы, управляющие записью и считыванием, подаются на временной детектор ВД, который управляет работой передатчика команд согласования скоростей Пер. КСС. При появлении неоднородности в зависимости от ее знака из ВД к Пер. КСС подается соответствующая команда на согласование скоростей.
Рисунок 1.58. Структурная схема оборудования временного группообразования с асинхронным сопряжением цифровых потоков, построенного по системе с двусторонним согласованием скоростей передачи.
При положительном согласовании скоростей на одной из временных позиций цикла передачи информация из ЗУ не считывается и на этой позиции передается балластный символ. На приеме данная позиция должна быть вычеркнута. Тем самым реальная скорость считывания информации из ЗУ несколько уменьшается. Такое согласование скоростей осуществляется путем запрета с помощью ячейки НЕТ одного импульса считывания. При отрицательном согласовании скоростей производится дополнительное считывание информации из ЗУ. Считывание происходит соответствующим импульсом, который подается от Пер. КСС через ячейку ИЛИ в строго определенные временные позиции цикла, на которых формируется временной канал отрицательного согласования скоростей.
Объединенный цифровой поток с выхода схемы объединения поступает в линейный тракт. В приемном устройстве объединенный цифровой поток распределяется через схему распределения по своим ЗУ блоков асинхронного сопряжения тракта приема БАСпр. Работой ячеек УР и БАСпр управляют импульсные последовательности от генераторного оборудования ГОпр, синхронная работа которого с ГОпер обеспечивается ВТЧ. После считывания с частотой, равной средней частоте записи, восстанавливается первоначальная скорость каждого из асинхронных цифровых потоков, объединяемых в оборудовании временного группообразования. Средняя частота считывания устанавливается устройством фазовой автоподстройки частоты (ФАПЧ), которое включает в себя генератор, управляемый напряжением (ГУН), временной детектор (ВД) и схему управления (СУ). На выходе СУ формируется управляющий сигнал, соответствующий текущему значению временного интервала между моментами записи и считывания.
По сигналу о необходимости положительного согласования скоростей, зафиксированному Пр. КСС, через логический элемент НЕТ осуществляется запрет записи информации в ЗУ. Временное положение сигнала запрета записи соответствует моменту осуществления положительного согласования скоростей в передающем устройстве. Сигнал запрета записи должен убрать из информационного потока балластный символ, вводимый при положительном согласовании скоростей. Отсутствие сигнала записи на выходе схемы НЕТ отметит и временной детектор, после чего частота считывания плавно уменьшится. По сигналу о необходимости отрицательного согласования скоростей с помощью логического элемента ИЛИ2 открывается элемент И схемы распределителя и в передаваемый информационный поток вводится дополнительный символ, изъятый при отрицательном согласовании скоростей. Одновременно через схему ИЛИ3 вводится дополнительный импульс управления записью, который поступает на ВД, в результате чего частота считывания плавно увеличивается. Таким образом, плавное изменение в допустимых пределах частоты считывания позволяет согласовать скорости записи и считывания. Правильное распределение на приеме группового сигнала по потокам, контроль и поиск режима синхронизма обеспечивается приемником синхросигнала. К параметрам этого приемника предъявляются довольно жесткие требования, так как время установления режима синхронизма при его нарушении должно быть меньше времени выхода из синхронизма оборудования низовых объединяемых потоков. В противном случае в этом оборудовании произойдет сбой синхронизации.
6.4. Оборудование асинхронного объединения цифровых потоков. Запоминающее устройство
В запоминающем устройстве (рисунок 1.59.) информационные символы через ячейки И записываются в ячейки памяти Я1 – ЯL. Процессом записи управляет распределитель записи, работающий с частотой fз, равной тактовой частоте поступающих информационных сигналов. Считывание осуществляется импульсными последовательностями с соответствующих выходов распределителя считывания, который управляется сигналом от ГОпер аппаратуры объединения цифровых потоков. Информация, считанная с ячеек Я1 – ЯL,объединяется логическим элементом ИЛИ. Число ячеек памяти выбирается таким, чтобы момент считывания всегда отставал от момента записи. Минимальное число ячеек памяти зависит от нескольких факторов. Рассмотрим некоторые из них.
Число ячеек памяти зависите от количества следующих подряд служебных символов в цикле передачи, относящихся к одному цифровому потоку. Служебные символы передаются на импульсных позициях временных сдвигов, которые, в свою очередь, организуются путем запрета считывания информации в соответствующие моменты времени.
Рисунок 1.59. Структурная схема запоминающего устройства.
Однако информационные символы продолжают поступать на вход ЗУ, поэтому должно быть предусмотрено соответствующее число дополнительных ячеек памяти. Для уменьшения числа ячеек памяти ЗУ желательно, чтобы служебные символы были равномерно рассредоточены в цикле передачи. Но в некоторых случаях, например при передаче синхросигнала, целесообразно формировать сосредоточенные служебные символы. Так, во вторичной ЦСП сосредоточиваются восемь служебных символов подряд - по два на каждый цифровой поток, а в третичной и четверичной ЦСП - 12 служебных символов (по три на каждый цифровой поток).
Так как согласование скоростей можно производить в строго определенный момент времени, определяемый импульсными позициями КСС в цикле объединенного цифрового потока, необходимо учитывать относительное время ожидания. Последнее зависит также и от длительности самого цикла (числа символов в цикле). Это требует соответствующего увеличения объема памяти.
Дополнительный объем памяти определяется значением временных колебаний, изменений частоты записи и считывания, вносимый как оборудованием асинхронного объединения/разделения цифровых потоков, так и оборудованием ЦСП объединяемых цифровых потоков. Обычно в зависимости от особенности построения цикла передачи, главным образом структуры и распределения символов синхросигнала, минимально необходимое число ячеек памяти составляет от пяти до восьми.
К одноименным выходам распределителей записи и считывания (на рисунке 1.59 используются выходы L) подключается ВД.
Временной детектор.
Временные интервалы между моментами записи и считывания контролируются ВД. В оборудовании временного группообразования используются цифровой и аналоговый временные детекторы. Цифровой детектор применяется в передающей части для определения момента возникновения неоднородности. В системах с двусторонним согласованием скоростей ВД должен не только обнаруживать моменты возникновения неоднородности, но и определять ее знак. В цифровом детекторе (рисунок 1.60) одноименные выходы распределителей записи и считывания подключены к раздельным выходам триггера DD1. Выходы триггера соединены с логическими элементами DD2 и DD3, на другие входы которых подаются контрольные импульсные последовательности с распределителя записи. Временное положение контрольных последовательностей выбирается таким образом, чтобы при нормальном режиме работы ЗУ на схемах И импульсы с триггера не совпадали по времени с контрольными импульсами. Если временной интервал между импульсами записи и считывания достиг величины, при которой необходимо согласование скоростей, на выходе соответствующей ячейки И появится импульс, который поступит в передатчик КСС.
Рисунок 1.60. Цифровой временной детектор.
При рассмотрении работы ВД примем число ячеек памяти в ЗУ равным четырем, тогда:
- на вход S триггера будет подаваться сигнал с 4-го выхода распределителя считывания,
- на вход R сигнал с 4-го выхода распределителя записи,
- на схему DD2 - сигнал с 3-го выхода распределителя записи,
- на схему DD3 - сигнал с 1-го выхода распределителя записи.
При отсутствии согласования скоростей сигналы на выходах DD2 и DD3 отсутствуют. При отрицательном согласовании скоростей импульсная последовательность с 3-го выхода распределителя записи совпадает с единичным состоянием выхода триггера Q, в результате чего формируется сигнал на выходе логического элемента И1. При положительном согласовании скоростей импульсная последовательность с 1-го выхода распределителя записи совпадает с единичным состоянием выхода Q триггера и формируется сигнал на выходе логического элемента И2.
Аналоговый детектор используется в приемной части для определения текущего значения временного интервала между моментами записи и считывания. В аналоговом детекторе (рисунок 1.61), как и в цифровом, импульсные последовательности с одноименных выходов распределителей записи и считывания подаются на раздельные входы R и S триггера, скважность сигнала, на выходе которого характеризует взаимное временное положение импульсов записи и считывания. Сигнал с выхода триггера подается на вход фильтра нижних частот ФНЧ, который выделит постоянную составляющую напряжения сигнала. Величина этого напряжения зависит от скважности сигнала. При нормальной работе ЗУ импульсы записи и считывания сдвинуты относительно друг друга на половину периода их следования. В этом случае скважность сигнала на выходе триггера будет равна двум, а напряжение постоянной составляющей на выходе ФНЧ — среднему значению, что соответствует номинальной скорости считывания. При увеличении или уменьшении временного интервала между моментами записи и считывания изменяются скважность сигнала на выходе триггера и значение постоянной напряжения сигнала. Эго напряжение подается на схему управления ГУН, которая плавно изменяет частоту считывания, увеличивая или уменьшая ее в зависимости от согласования скоростей.
Рисунок 1.61. Структурная схема аналогового детектора.
Передача команд согласования скоростей.
Команды согласования скоростей должны обладать практически такой же помехозащищенностью, как и цикловые синхросигналы. Это объясняется тем, что ошибка при опознавании КСС равносильна изменению на один такт длительности цикла передачи (в ту или иную сторону в зависимости от вида ошибки) и вызовет сбой цикловой синхронизации в соответствующем объединяемом потоке. Последнее, в свою очередь, может вызвать сбой цикловой синхронизации во всех системах более низкого порядка этого цифрового потока. Однако между синхросигналами и КСС есть существенная разница, которая заключается в том, что первые обладают периодичностью, так как передаются в каждом цикле передачи, тогда как вторые несут информацию об однократных изменениях этого состояния. Поэтому помехозащищенность синхросигнала достигается методом накопления, и ошибка в одном или даже нескольких синхросигналах не вызывает сбоя цикловой синхронизации, а помехозащищенность КСС обеспечивается кодами, исправляющими ошибки.
В системах с односторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии или наличии КСС. Для передачи этой информации достаточно одного двоичного разряда. Тогда для защиты от искажений одного символа КСС достаточно использовать трехразрядную кодовую группу, для защиты двух символов - пятиразрядную кодовую группу и т. д. Обычно в системах с односторонним согласованием скоростей для передачи соответствующих команд используются кодовые группы вида 00...0 - для передачи информации об отсутствии согласования скоростей и 11...1 для передачи информации о наличии согласования скоростей. Число символов в кодовой группе выбирают нечетным. При этом правильное опознавание КСС осуществляется, если число искаженных символов не превышает половины общего числа символов в команде.
В системах с двусторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии согласования скоростей, положительном согласовании скоростей и отрицательном согласовании скоростей. Для передачи этой информации необходимо уже два двоичных разряда. Тогда для защиты от искажений одного символа КСС необходимо использовать пятиразрядную кодовую комбинацию, для защиты от искажения двух символов - семиразрядную кодовую комбинацию и т. д. Увеличение числа КСС и числа разрядов в кодовой комбинации приводит к возрастанию объема передаваемой информации.
Таким образом, по объему передаваемой информации системы с двусторонним согласованием скоростей и передачей трех команд менее экономичны, чем системы с односторонним согласованием скоростей, так как требуют большего объема передаваемой информации.
Стремление реализовать достоинства систем с двусторонним согласованием скоростей и вместе с тем обеспечить такую же помехозащищенность, как в системе с односторонним согласованием скоростей при одинаковом числе разрядов кодовых групп команд, привело к созданию системы с двусторонним согласованием скоростей с исключением передачи команды об отсутствии согласования. Такие системы называются системами с двусторонним согласованием скоростей и двухкомандным управлением. По числу передаваемых команд подобные системы идентичны системам с односторонним согласованием скоростей. Структура двухкомандного сигнала показана на рисунке 1.62,а. При отсутствии согласования скоростей с передающей станции будет поступать чередование положительных и отрицательных команд согласования скоростей. Если временной интервал ∆Т между моментами записи и считывания достигнет значения Тсч, то необходимо произвести согласование скоростей. В этом случае передаются подряд две команды положительного или отрицательного согласования скоростей (рисунок 1.62, а). Такая структура передачи КСС позволяет выявить одиночные ошибки в передаваемых командах. Для рассмотрения возможности определения ошибок интервал времени передачи чередующихся команд назовем пассивным, а интервал времени передачи команд положительного или отрицательного согласования скоростей (две одинаковые команды подряд) активным.
На рисунке 1.62, б, в показаны ошибки в пассивном интервале передачи команд. Эти ошибки легко обнаружить, так как подряд следуют три одинаковые команды, что при нормальной работе невозможно. Сложнее выявить ошибки в активном интервале (рисунок 1.62, г, д), поскольку в данном случае положительная команда трансформируется в отрицательную и наоборот. С учетом возможности коррекции ошибок в пассивном интервале или в обоих случаях и строятся приемники команд согласования скоростей.
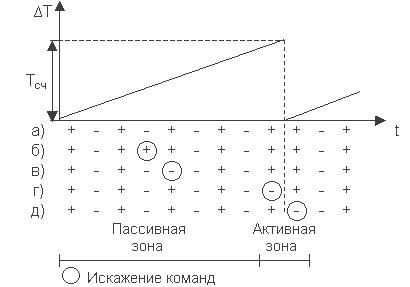
Рисунок 1.62. Структура двухкомандного сигнала при двустороннем согласовании скоростей.
Приемник КСС с коррекцией ошибки в пассивном интервале показан на рисунке 1.63. Он содержит три узла: опознаватель, анализирующее устройство, корректор ошибок. Опознаватель определяет знак согласования скоростей. Анализатор выявляет положительную или отрицательную КСС. Он содержит триггер Тг, на один вход которого подаются импульсы команд положительного согласования скоростей, а на другой - отрицательные, и две схемы И.
При появлении подряд двух импульсов одинаковых команд второй импульс пройдет через свою схему И. Корректор ошибок служит для выявления ошибки в пассивном интервале времени. Он содержит два счетчика команд: положительных и отрицательных.
Рисунок 1.63. Приемник команд согласования скоростей с коррекцией ошибок на пассивном интервале передачи КСС.
Емкость счетчиков - три единицы. Счетчики подключены к опознавателю знака так, что появление команды определенного знака записывается в свой счетчик, а для другого счетчика он является сигналом сброса.
Если в счетчик подряд поступило три команды, необходимо осуществить коррекцию. При коррекции производится вставка или изъятие из цифрового потока одного из временного интервала в зависимости от прошедшей команды согласования скоростей. Такая коррекция не позволяет восстановить передаваемую кодовую комбинацию потока, но дает возможность сохранить длительность его цикла, что не повлечет за собой срыва цикловой синхронизации в этом потоке.
Для коррекции ошибок в активном интервале передачи команд с передающей станции поступает знак промежуточного значения изменения временного интервала между сигналами записи и считывания. Необходимо учесть, что команды согласования скоростей будут передаваться довольно редко. Это определяется стабильностью частоты задающего генератора, используемого при формировании низовых потоков и в оборудовании временного группообразования. Рассмотрим это на примере системы передачи ИКМ-120. Как будет показано далее, расхождение частот может достигать 120 Гц, т. е. за 1 с максимальное число КСС равно 120, а число циклов за 1 с - 8000, т. е. в 67 раз больше. В каждом цикле имеются временные позиции для передачи информационных символов при отрицательном согласовании скоростей. При отсутствии команд согласования скоростей эти временные позиции можно использовать для передачи знака промежуточного значения изменения временного интервала между сигналами записи и считывания. Из этого видно, что информация о знаке промежуточного значения изменения временного интервала будет передаваться значительно чаще, чем сами КСС.
При использовании такого способа коррекции каждая сдвоенная команда несет в себе информацию только о наличии согласования скоростей, в то время как решение о знаке этого согласования принимается на основе многократно передаваемой информации о знаке изменения временного интервала между сигналами записи и считывания. Как показано на рисунке 1.62, г, д при одиночном искажении сдвоенных команд последовательности (++) преобразуются в последовательности (- -), а последовательности (- -) (на рисунке не показаны) - в последовательности (++); при этом момент передачи сдвоенных команд сдвигается на один временной интервал передачи КСС. Это и используется в приемнике согласования скоростей для коррекции ошибок.
В схему приемника команд согласования скоростей добавляются узлы определения знака промежуточного состояния скоростей и устройство сравнения, определяющее несоответствие информации о знаке согласования скоростей виду сдвоенной команды. Устройство фазовой автоподстройки частоты. Схема устройства ФАПЧ приведена на рисунке 1.64. В состав ее входят временной детектор (ВД), схема управления (СУ) и генератор, управляемый напряжением, (ГУН). Работа аналогового ВД была рассмотрена ранее. Схема управления, содержащая ФНЧ, выделяет из сигнала с выхода ВД постоянную составляющую напряжения. Для идеального восстановления первоначальной скорости цифрового потока ФНЧ должен иметь бесконечно малую полосу пропускания.
Рисунок 1.64. Устройство фазовой автоподстройки частоты.
Это позволит значительно уменьшить временные флуктуации импульсов передаваемого цифрового потока, вносимые оборудованием временного группообразования. Однако при этом не обеспечивается необходимая полоса захвата устройства ФАПЧ, которая не может быть меньше максимального расхождения частот записи в передающем устройстве fз.пер и считывания в приемном устройстве fcч.пр. Следовательно,
∆FФНЧ> fз.пер δ f з.пер+ fз.перδ f сч.пр (1.33)
где ∆FФНЧ - полоса пропускания ФНЧ; δ - относительная нестабильность частоты f. Так, при объединении цифровых потоков сформированных аппаратурой ИКМ-30:fз = f сч =2048 кГц, δ f з =δ f сч = 3·10-5, ∆FФНЧ =120 Гц.
На вход ГУН будут проходить все составляющие сигнала с выхода ВД, попадающие в полосу ∆FФНЧ, что приводит к временным флуктуациям передаваемого цифрового потока. Для уменьшения этих флуктуаций в схемах ФАНЧ применяются специальные устройства.